Изобретение относится к области средств диагностического железнодорожного оборудования, в частности к устройствами способам бесконтактного контроля геометрии поверхности катания колеса, характеристик колесных пар рельсовых транспортных средств и оценки устойчивости взаимодействия колесо-рельс при прохождении поезда.
Известен способ мониторинга геометрических параметров колесной пары и ее пространственного положения относительно пути» с использованием оптических излучателей, формирующих нескольких синфазно модулированных лучей для мониторинга геометрических параметров колесных пар (RU 2180300, 2002).
Недостатком известного способа является невозможность определения геометрических параметров всей длины развертки поверхности катания колеса и невозможность определения в режиме реального времени отклонения реального профиля колеса от рабочего для различных видов подвижного состава и устойчивости взаимодействия колесо-рельс.
Известны устройство и способ измерения профиля железнодорожного колеса». Контроль параметров колеса осуществляется с помощью мобильных лазерных триангуляционных датчиков (RU2500561, 2013).
Недостатком предложенного технического решения является сложность корректировок измеренного профиля и невозможность определения в режиме реального времени отклонения реального профиля колеса от рабочего для различных видов подвижного состава.
Известен способ измерения параметров колес движущегося железнодорожного состава. Контроль параметров колеса производится за счет обработки параметров рассеянного от измеряемого объекта лазерного излучения (RU 2550380, 2015).
Недостатком предложенного способа является невозможность определения параметров всей развертки колеса и параметров колесной пары.
Известны система и способ для контроля железнодорожных колес, в которых предлагается получать изображения железнодорожных колес с помощью стереокамер и далее, строить и анализировать трехмерные и двумерные модели железнодорожного колеса (RU 2743020, 2021).
Недостатком предложенной системы и способа является невозможность определения диаметра колеса, геометрических параметров всей развертки поверхности катания колеса и невозможность определения в режиме реального времени отклонения реального профиля колеса от рабочего для различных видов подвижного состава.
Технической проблемой, на разрешение которой направлено данное изобретение, является проведение комплексного контроля геометрических параметров железнодорожных колес и колесных пар и оценки устойчивости колесной пары в рельсовой колее, при движении подвижного состава.
Технический результат заключается в создании устройства и способа контроля геометрических параметров железнодорожных колес и колесных пар при движении и оценки устойчивости колесной пары в рельсовой колее, позволяющего при движении подвижного состава:
1. Определять параметры развертки профиля катания каждого колеса подвижного состава, проходящего мимо устройства, идентифицировать тип измеряемого колеса, сравнивать измеренный профиль со стандартным, определять разницу и при превышении норматива износа формировать и передавать пользователю инцидент.
2. Определять параметры каждой колесной пары – расстояние между гребнями и разность диаметров колес в паре при превышении норматива, формировать и передавать пользователю инцидент.
3. Определять поперечное смещение колесной пары в колее.
4. Рассчитывать эквивалентную конусность для каждой колесной пары.
Сущность изобретения заключается в том, что в устройство для контроля геометрических параметров движущейся колесной пары железнодорожного транспорта, содержащее установленные на расположенном вдоль рельсов основании, оптические измерительные блоки, включающие в себя триангуляционные 2D сканеры, оптическую систему контроля подуклонки и ширины рельсовой колеи, состоящую из двух 2D сканеров, счетчик осей подвижного состава, контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину, первый и второй контроллеры, контроллер вычисления параметров поверхности катания колес, блок хранения данных результатов контроля, блок хранения библиотеки, принтер и пульт оператора, внешний интерфейс для обмена информации с другими системами, объединенными в единый пост, введен датчик температуры, восемь триангуляционных 2D-сканеров установлены на жестком основании и разнесены по пути следования колесных пар вдоль рельсов с шагом 1 метр, входы блока обработки информации подключены к выходу датчика счета осей, а информационный вход блока обработки информации выполнен с возможностью считывания натурного листа.
При этом в способе контроля геометрических параметров движущейся колесной пары железнодорожного транспорта, включающем определение параметров развертки профиля катания каждого колеса проходящего подвижного состава, идентификацию типа измеряемого колеса, сравнение измеренного профиля со стандартным, определение разницу и, при превышении норматива износа, формирование и передачу пользователю инцидента, определяют параметры каждой колесной пары, в том числе расстояние между гребнями и разность диаметров колес в паре, а при превышении норматива, формируют и передают пользователю инцидент, определяют поперечное смещение колесной пары в колее и рассчитывают эквивалентную конусность для каждой колесной пары, обнаруживают общий износ профиля катания и локальные ползуны (лыски) на поверхности катания, по информации контролируемого колеса из библиотеки, выбирают стандартный профиль колеса данного типа подвижного состава, и сравнивают с фактическим измеренным и, в случае критической разницы размеров, или наличия лыски, формируют кодированный инцидент с указанием типа и величины неисправности, номера измерительного поста, номера колесной пары и номера поезда, рассчитывают эквивалентную конусность и определяют устойчивость взаимодействия колесо-рельс и, в критическом случае формируют инцидент указанием величины эквивалентной конусности, номера колесной пары и номера поезда, рассчитывают геометрические параметры колесной пары, в том числе, расстояния между гребнями и диаметрами колес, на основании сигнала с датчика температуры корректируют температурную погрешность геометрических размеров колес, при этом обработку полученной информации производят в реальном времени и результат измерений формируют сразу после прохода колес в измерительном поле устройства.
Изобретение иллюстрируется чертежами, где
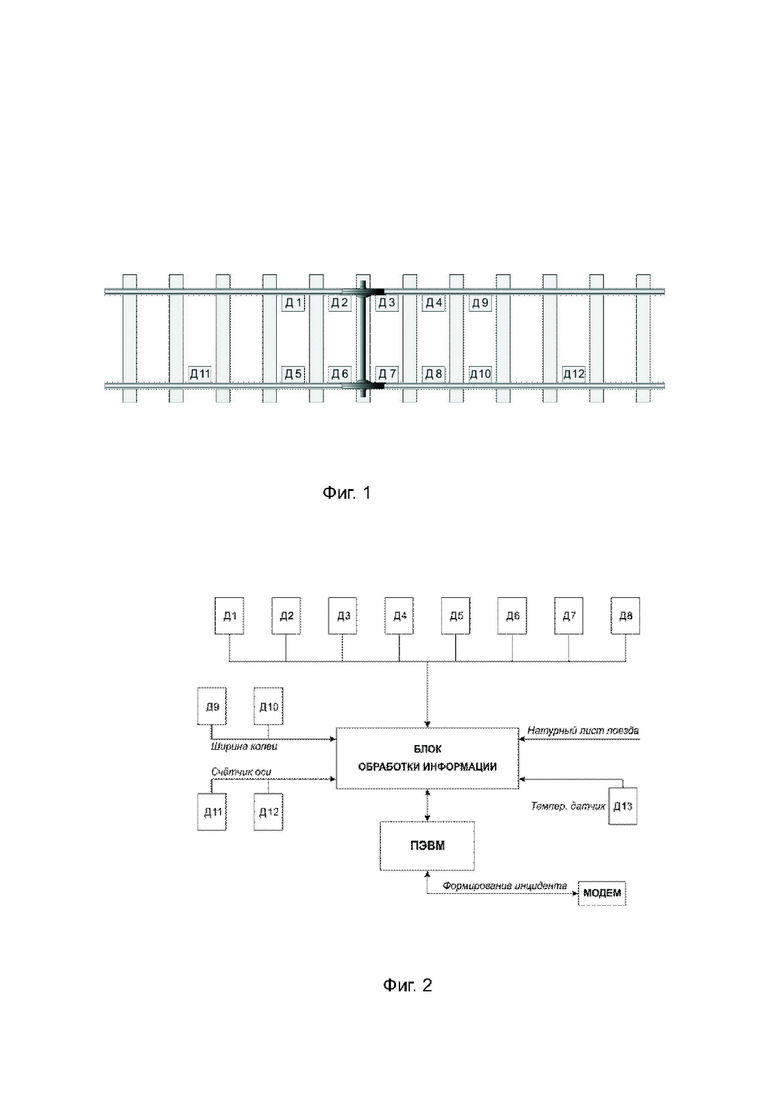
На Фиг. 1 представлена схема расположения рельсов на основании с оптическими измерительными блоками,
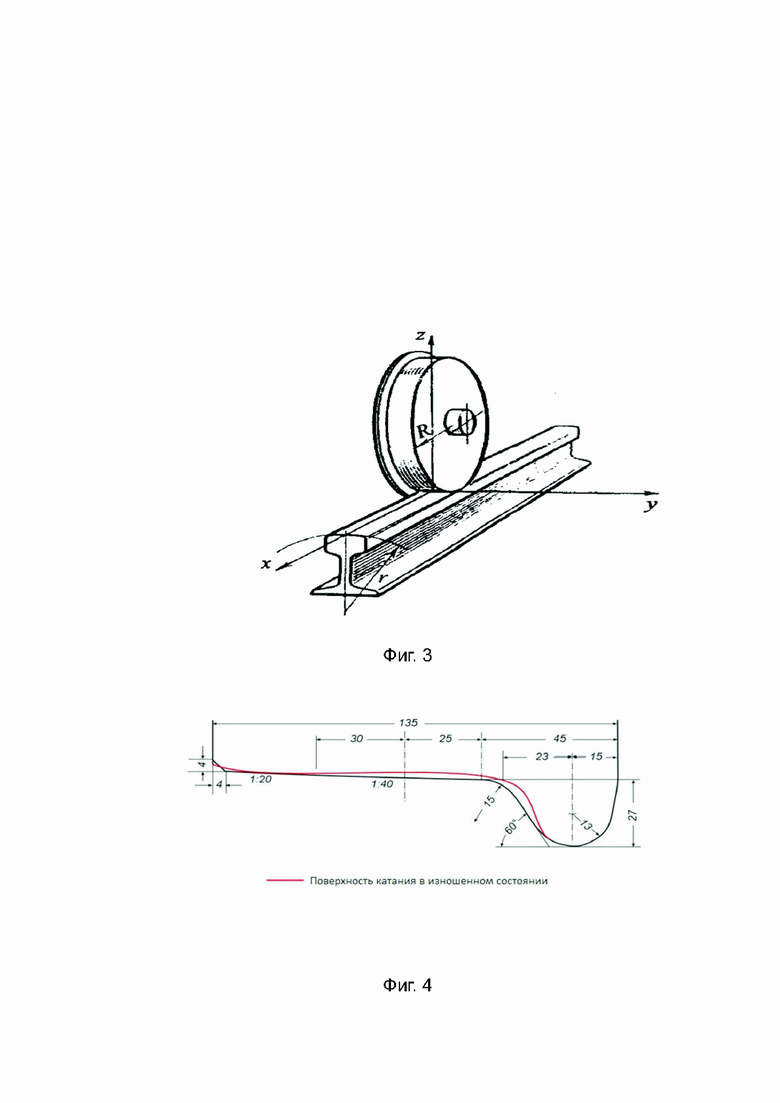
На Фиг. 2 представлена блок-схема контрольно-вычислительного комплекса,
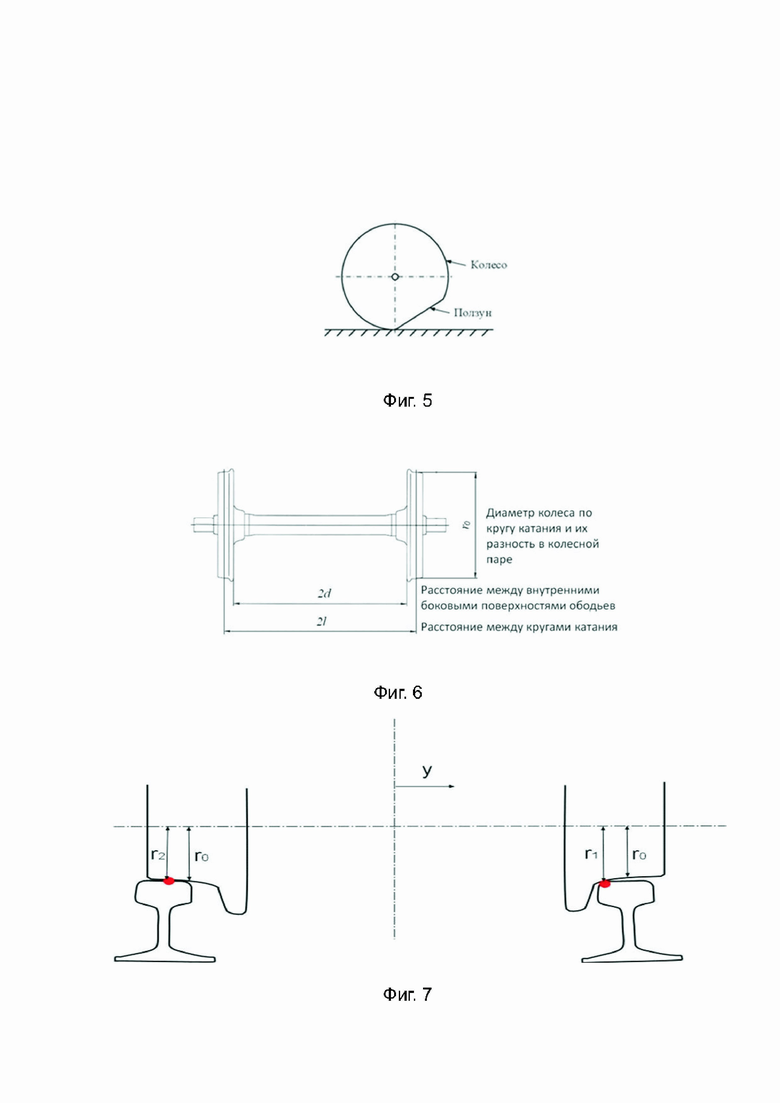
На Фиг. 3 представлена схема движения колеса по рельсу,
На Фиг. 4 представлена схема поверхности катания,
На Фиг. 5 представлена схема дефектов колеса,
На Фиг. 6 представлены основные контролируемые размеры колесной пары,
На Фиг. 7 представлена схема расположения колесной пары на рельсах и основные контролируемые размеры этого расположения.
Устройство и способ для контроля геометрических параметров колесных пар устанавливается на жестком основании железнодорожного пути и содержит 8 оптических измерительных триангуляционных датчиков, сканирующих поверхность катания колес, контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину, первый и второй контроллеры, контроллер вычисления параметров поверхности катания колес, блок данных результатов контроля, принтер и пульт оператора. Дополнительно устанавливаются оптическая подсистема контроля ширины рельсовой колеи, счетчик осей подвижного состава, блок приема информации с параметрами натурного листа, систему обдува иллюминаторов оптических иллюминаторов для защиты от загрязнения. В результате с высокой точностью и достоверностью определяются геометрические параметры каждого колеса и всей колесной пары и вычисляются комплексные характеристики динамического взаимодействия рельсового пути и подвижного состава.
Способ для контроля геометрических параметров колесных пар осуществляется устройством контроля следующим образом.
За время проезда одной колесной пары устройство одновременно контролирует несколько параметров.
При проезде колеса вдоль оптических триангуляционных датчиков Д1-Д8, как показано на Фиг. 1, происходит последовательное измерение координат точек профиля катания каждого из колес колесной пары в единой системе координат – XY. Фиг.3.
Это позволяет определить взаимные координаты точек поверхности катания, определить ее геометрию и диаметр колеса. Измерение координат точек профиля катания колеса осуществляется с помощью датчиков, состоящих из лазерного блока подсветки рельса, формирующего структуированную засветку, и блока приемника отраженного светового сигнала. Максимальная точность измерения координат точек профиля катания колеса обеспечивается конфигурацией расположения датчиков и глубиной резкости поля зрения.
Лазерные блоки подсветки создают так называемое «световое сечение» профиля катания колеса. Излучение, отраженное от колеса, регистрируется приемниками, формирующими видеосигнал. Каждый оптический датчик контролирует часть развертки колеса. Стыковка сигналов с различных датчиков и обработка видеосигнала производится ПЭВМ, входящим в блок сбора обработки данных, как показано на Фиг. 2. В результате обработки видеосигнала получается файл, содержащий измеренные координаты поверхностей катания двух колес каждой колесной пары с шагом не менее 25 мм по кругу катания колеса, что позволяет обнаруживать ползуны менее 0,5 мм, Фиг. 4,5.
Одновременно в блок обработки данных от счетчика осей подвижного состава поступает номер контролируемой колесной пары и информация из натурного листа, какому типу подвижной единицы соответствует данная колесная пара в составе.
Блок обработки данных выбирает из памяти стандартный профиль катания соответствующего колеса, представленный в тех же координатах XY, и сравнивает его и измеренным.
При наличии недопустимых отклонений измеренного профиля от стандартного формируется инцидент, который передается потребителю.
1. Контроль геометрических параметров катания колесной пары
Датчиками Д1, Д2 сканируется поверхность колес и с учетом постоянной базы – расстояния между датчиками Д1, Д2, определяется расстояния между элементами колесной пары 2d, 2l, как показано на Фиг. 6. Определяются диаметры колес колесной пары и их разность ro.
При наличии недопустимых отклонений формируется инцидент, который передается потребителю.
2. Контроль эквивалентной конусности
Датчиками Д1, Д2 сканируется поверхность колес и с учетом постоянной базы – расстояния между датчиками Д1, Д2, определяется величина y -поперечной смещение колесной пары в колее.
Датчиками Д9, Д10 сканирующими поверхность рельсов, определяются:
• Ширина колеи;
• Наклон поверхности катания рельсов.
Датчиками Д9, Д10 определяется расстояние между рельсами L, наклон поверхности катания и подуклонка.
Расчет эквивалентной конусности, как показано на Фиг. 7, производится исходя из соотношения r1=r01+ytgγ, r2=r02-ytgγ, где y – поперечное смещение колесной пары, где эквивалентная конусность – tgγ = (r01 -r01+ r02 - r2 )/2.
Устройство и способа контроля геометрических параметров железнодорожных колес и колесных пар при движении и оценки устойчивости колесной пары в рельсовой колее, позволяющего при движении подвижного состава:
• Определять параметры развертки профиля катания каждого колеса подвижного состава, проходящего мимо устройства, идентифицировать тип измеряемого колеса, сравнивать измеренный профиль со стандартным, определять разницу и при превышении норматива износа формировать и передавать пользователю инцидент.
• Определять параметры каждой колесной пары – расстояние между гребнями и разность диаметров колес в паре при превышении норматива формировать и передавать пользователю инцидент.
• Определять поперечное смещение колесной пары в колее.
• Рассчитывать эквивалентную конусность для каждой колесной пары.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ДВИЖУЩИХСЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2024 |
|
RU2837941C1 |
| СПОСОБ ЛАЗЕРНОГО СКАНИРОВАНИЯ КОЛЕСНОЙ ПАРЫ ДВИЖУЩЕГОСЯ ЛОКОМОТИВА | 2022 |
|
RU2794230C1 |
| УСТРОЙСТВО ДЛЯ ЛАЗЕРНОГО СКАНИРОВАНИЯ КОЛЕСНОЙ ПАРЫ ДВИЖУЩЕГОСЯ ЛОКОМОТИВА | 2022 |
|
RU2794231C1 |
| СПОСОБ МОНИТОРИНГА ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО РЕЛЬСОВОГО ПУТИ | 2003 |
|
RU2266226C2 |
| УСТРОЙСТВО ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2270120C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| Система контроля дефектов колёсных пар подвижного железнодорожного состава | 2023 |
|
RU2818020C1 |
| СПОСОБ МОНИТОРИНГА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО ПУТИ | 2000 |
|
RU2180300C1 |
| ПРОФИЛЬ ПОВЕРХНОСТИ ЖЕЛЕЗНОДОРОЖНОГО КОЛЕСА | 2011 |
|
RU2441762C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2167778C2 |
Изобретение относится к средствам бесконтактного контроля геометрии поверхности катания колеса, характеристик колесных пар рельсовых транспортных средств и оценки устойчивости взаимодействия колесо-рельс при прохождении поезда. Устройство содержит установленные на расположенном вдоль рельсов основании оптические измерительные блоки, включающие в себя триангуляционные 2D-сканеры, оптическую систему контроля подуклонки и ширины рельсовой колеи, состоящую из двух 2D-сканеров, счетчик осей подвижного состава, контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину, первый и второй контроллеры, контроллер вычисления параметров поверхности катания колес, блок хранения данных результатов контроля, блок хранения библиотеки, принтер и пульт оператора, внешний интерфейс для обмена информации с внешними системами, объединенными в единый пост. При этом восемь триангуляционных 2D-сканеров установлены на жестком основании и разнесены по пути следования колесных пар вдоль рельсов с шагом 1 метр, введен датчик температуры, входы блока обработки информации подключены к выходу датчика счета осей, а информационный вход блока обработки информации выполнен с возможностью считывания натурного листа. Достигается возможность определения расстояния между гребнями и разность диаметров колес в паре при превышении норматива, поперечного смещения колесной пары в колее и расчёта эквивалентной конусности для каждой колесной пары. 2 н.п. ф-лы, 7 ил.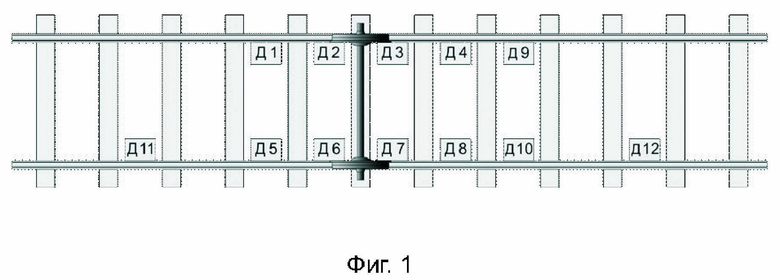
1. Устройство для контроля геометрических параметров движущейся колесной пары железнодорожного транспорта, содержащее установленные на расположенном вдоль рельсов основании оптические измерительные блоки, включающие в себя триангуляционные 2D-сканеры, оптическую систему контроля подуклонки и ширины рельсовой колеи, состоящую из двух 2D-сканеров, счетчик осей подвижного состава, контрольно-вычислительный комплекс, включающий персональную электронно-вычислительную машину, первый и второй контроллеры, контроллер вычисления параметров поверхности катания колес, блок хранения данных результатов контроля, блок хранения библиотеки, принтер и пульт оператора, внешний интерфейс для обмена информации с внешними системами, объединенными в единый пост, отличающееся тем, что восемь триангуляционных 2D-сканеров установлены на жестком основании и разнесены по пути следования колесных пар вдоль рельсов с шагом 1 метр, введен датчик температуры, входы блока обработки информации подключены к выходу датчика счета осей, а информационный вход блока обработки информации выполнен с возможностью считывания натурного листа.
2. Способ контроля геометрических параметров движущейся колесной пары железнодорожного транспорта, включающий определение параметров развертки профиля катания каждого колеса проходящего подвижного состава, идентификацию типа измеряемого колеса, сравнение измеренного профиля со стандартным, определение разницы и при превышении норматива износа формирование и передачу пользователю инцидента, отличающийся тем, что определяют параметры каждой колесной пары, в том числе расстояние между гребнями и разность диаметров колес в паре, а при превышении норматива формируют и передают пользователю инцидент, определяют поперечное смещение колесной пары в колее и рассчитывают эквивалентную конусность для каждой колесной пары, обнаруживают общий износ профиля катания и локальные ползуны - лыски на поверхности катания, по информации контролируемого колеса из библиотеки выбирают стандартный профиль колеса данного типа подвижного состава и сравнивают с фактическим измеренным, и в случае критической разницы размеров или наличия лыски формируют кодированный инцидент с указанием типа и величины неисправности, номера измерительного поста, номера колесной пары и номера поезда, рассчитывают эквивалентную конусность и определяют устойчивость взаимодействия колесо-рельс, и в критическом случае формируют инцидент указанием величины эквивалентной конусности, номера колесной пары и номера поезда, рассчитывают геометрические параметры колесной пары, в том числе расстояния между гребнями и диаметрами колес, на основании сигнала с датчика температуры корректируют температурную погрешность геометрических размеров колес, при этом обработку полученной информации производят в реальном времени и результат измерений формируют сразу после прохода колес в измерительном поле устройства.
| Устройство для взаимной блокировки двух разъединителей | 1932 |
|
SU36508A1 |
| для охлаждения изделий из ковкого чугуна | 1948 |
|
SU80554A1 |
| УСТРОЙСТВО ДЛЯ ЛАЗЕРНОГО СКАНИРОВАНИЯ КОЛЕСНОЙ ПАРЫ ДВИЖУЩЕГОСЯ ЛОКОМОТИВА | 2022 |
|
RU2794231C1 |
| СПОСОБ ЛАЗЕРНОГО СКАНИРОВАНИЯ КОЛЕСНОЙ ПАРЫ ДВИЖУЩЕГОСЯ ЛОКОМОТИВА | 2022 |
|
RU2794230C1 |
| Способ задубливания овчин перед дублением | 1931 |
|
SU37244A1 |
| CN 109131431 A, 04.01.2019 | |||
| JP 2019095228 A, 20.06.2019 | |||
| US 2013313372 A1, 28.11.2013 | |||
| EP 1600351 A1, 30.11.2005. | |||

