Изобретение относится к деталям машин и может быть использовано в качестве гасителя колебаний агрегатов транспортных средств в автомобильной технике.
Существует гаситель колебаний, предназначенный для подавления резонансных пиков колебаний кузова (гаситель - стр. 204, В.Штробель. Современный автомобильный кузов. Пер. с нем. Н.А.Юниковой. Под ред. Л.И.Вихко. - М.: Машиностроение, 1984, 264 с., ил.) и принятый за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при применении известного устройства гашения колебаний, принятого за прототип, относятся: настройка на гашение колебаний только определенной частоты, отсутствие учета изменения динамических характеристик агрегата в зависимости от внутренних протекающих процессов, оборудования дополнительными деталями, загрузки или износа или поломки какого-либо элемента крепления.
Технический результат - гашение колебаний агрегата автомобиля в заданном вертикальном или поперечном направлении с учетом изменения возмущающего воздействия и динамических характеристик агрегата в заданном движении и, как следствие, устранение негативных последствий колебаний (в вертикальной плоскости - улучшение плавности хода, в поперечной - поперечной устойчивости, в продольной - повышение курсовой устойчивости, комфортабельности).
Особенность заключается в том, что предлагаемое устройство гашения колебаний имеет переменную массу в зависимости от изменения динамических характеристик колеблющегося агрегата.
Сущность изобретения заключается в следующем: устройство, представляющее резервуар с магнитной жидкостью, имеет аппарат обратной связи, позволяющий оценивать степень гашения колебаний, изменение возмущающего воздействия и динамических характеристик агрегата в заданном направлении, и устройство, позволяющее менять объем, а следовательно, и массу затвердевающей жидкости, что позволяет управлять процессом гашения колебаний, автоматически перестраивая систему на необходимую частоту, тем самым адаптивно гасить колебания.
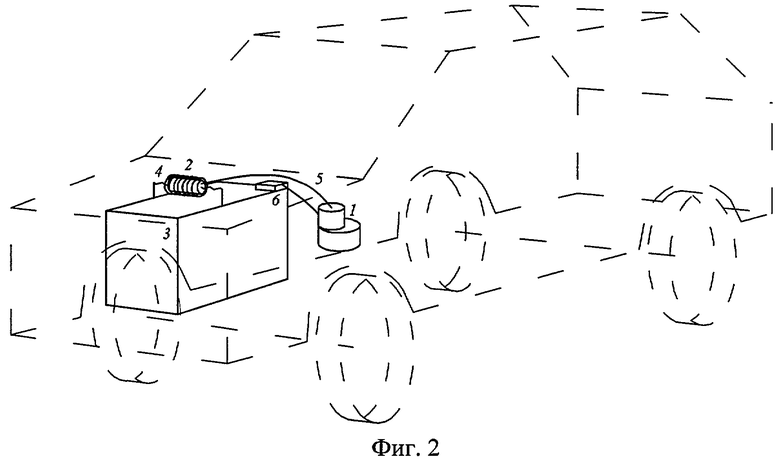
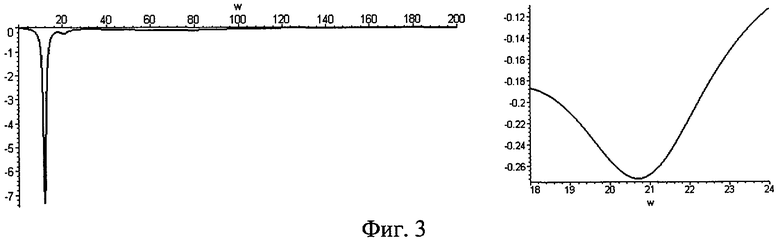
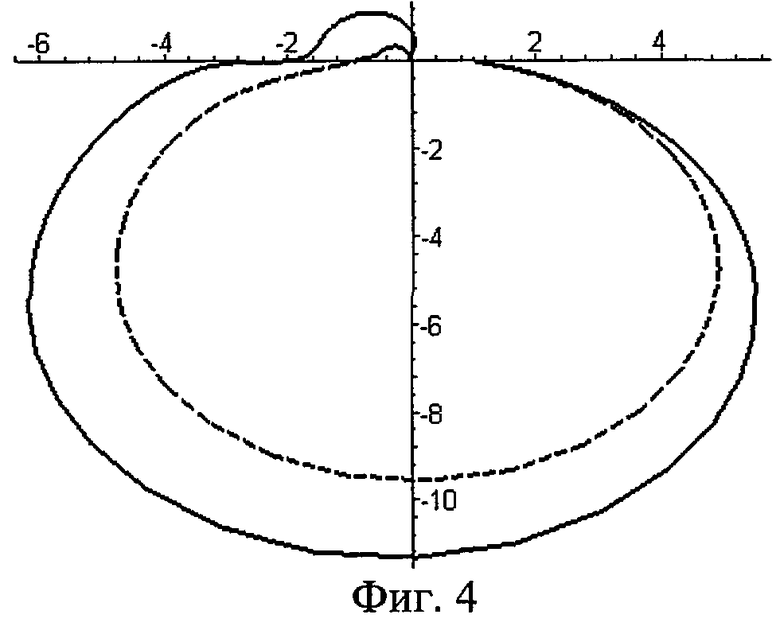
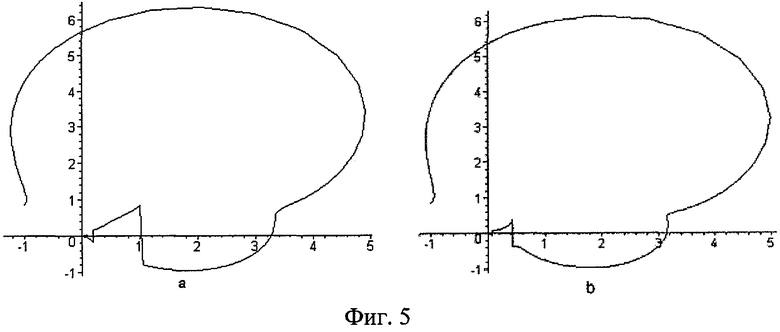
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема устройства, на фиг.2 - конструктивное расположение элементов устройства на автомобиле и двигателе, на фиг.3 - амплитудно-частотная характеристика (АЧХ) колебаний двигателя, на фиг.4 - линейные амплитудно-фазочастотные характеристики (АФЧХ) двигателя без гасителя и с предлагаемым гасителем колебаний, фиг.5 - годографы определения критической скорости автомобиля.
Устройство содержит (фиг.1): резервуар 1, объединенный с регулируемым насосом 2, соединенный через клапан сброса электромагнитной жидкости 3 с соленоидным механизмом 4, гибким трубопроводом 5 с бачком 6, в корпус которого впаяна электропроводка 7. Бачок 6 соединен с агрегатом, колебания которого гасятся посредством двух пружин 8 известной жесткости С, расположенных в направлении гашения колебаний. Электронный блок управления 9, запитываемый от аккумуляторной батареи 10, управляет процессами перекачки электромагнитной жидкости с помощью насоса 2 и клапана сброса жидкости 3, осуществляет обратную связь посредством вибродатчика 11 и накладывает электромагнитное поле через обмотку 7 на электромагнитную жидкость, находящуюся в бачке 6.
Работа устройства осуществляется следующим образом: в начале движения автомобиля система включатся в работу, считываются показания с вибродатчика 11, находящегося на агрегате автомобиля, колебания которого требуется погасить.
Электронный блок управления 9, определив значение частоты вибраций, определяет требуемый объем жидкости для перекачки из резервуара 1 в бачок 6 по формуле:
где С - жесткость пружин крепления 8; ω - частота, которую требуется погасить; ρ - плотность электромагнитной жидкости. Электронный блок управления подает ток на соленоидный механизм 4, открывая таким образом клапан 4, затем управляет насосом 2, осуществляющим перекачку жидкости из резервуара 1 в бачок 6. По прекращению перекачки электронный блок управления 9 подает ток на соленоид 4, закрывая клапан, а также подает ток на электропроводку 7, накладывая электромагнитное поле на перекаченный объем электромагнитной жидкости, находящийся в бачке 6. Жидкость затвердевает.
После этого электронный блок управления 9 через равные моменты времени запрашивает показания с вибродатчика 11 и при изменении внешних условий соответственно изменяет параметры адаптивного гасителя колебаний. При увеличении частоты колебаний открывается клапан 4 и насос 2 откачивает определенную массу электромагнитной жидкости пропорционально квадрату частоты, при снижении частоты колебаний - наоборот добавляет жидкость.
Рассмотрим конструктивное исполнение устройства для гашения боковых колебаний двигателя внутреннего сгорания. На фиг.2 показан автомобиль с двигателем и устройством гашения колебаний в боковом направлении. Интегрированный гидромодуль 1 содержит резервуар с электромагнитной жидкостью, насос, клапан сброса жидкости с соленоидным механизмом, а также электронный блок управления. Бачок с электропроводкой 2, закрепленный на двигателе 3 посредством пружин 4 связан с гидромодулем 1 трубопроводом 5. Вибродатчик 6 находиться на двигателе 3 и связан с электронным блоком управления гидромодуля 1.
Теоретические сведения, подтверждающие возможность осуществления изобретения с получением вышеуказанного технического результата, заключаются в следующем (Ю.Н.Санкин, С.Л.Пирожков. Управление полем виброперемещений упругих систем с распределенными параметрами, стр.71-79 // Механика и процессы управления: Сборник научных трудов / Ульяновский гос. техн. ун-т. Ульяновск, 2000. 84 с):
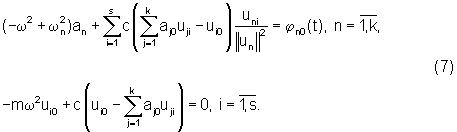
Рассмотрим нестационарные колебания системы с распределенными параметрами без наличия регулятора уровня вибраций. Эти колебания в линейном приближении описываются следующей системой дифференциальных уравнений:

где an=an(t) - коэффициент разложения поля перемещений u в ряд по формам собственных колебаний:
где un - форма колебаний; k - число существенно проявляющих себя форм колебаний;  - интегральный коэффициент рассеяния энергии; В - оператор рассеяния энергии;
- интегральный коэффициент рассеяния энергии; В - оператор рассеяния энергии;  - норма соответствующей формы колебаний; R - масса единицы длины, площади, объема; L - область, занимаемая упругим телом.
- норма соответствующей формы колебаний; R - масса единицы длины, площади, объема; L - область, занимаемая упругим телом.
где f - возмущающие силы.
Пусть к рассматриваемой системе присоединены s сосредоточенных масс m; при помощи упругих элементов сi. Тогда вместо (1) получим следующую систему уравнений:
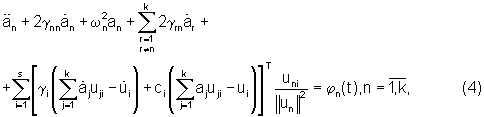

Здесь uji - вектор значений j-й формы колебаний в i-й точке упругой системы; γi - матрица рассеяния энергии в i-м упругом элементе; сi - матрица жесткостей i-го упругого элемента.
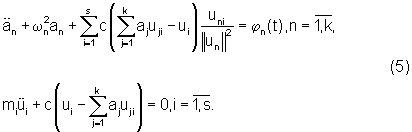
Чтобы выяснить принципиальную сторону вопроса, рассмотрим балку, несущую s упругоприсоединенных масс без учета рассеяния энергии. Положим, что все массы и соответствующие упругие элементы одинаковы: mi,=m, сi=с. Тогда система (3) упроститься и перепишется в виде:
Далее пусть на систему действует гармоническая возмущающая сила f=f0sinωt, где f0 - амплитуда возмущающей силы; ω - ее частота. Тогда ϕn(t)=ϕn0sinωt, где  причем L здесь уже длина балки.
причем L здесь уже длина балки.
Ограничимся частным решением системы (4), то есть чисто вынужденной составляющей, полагая

где аn0, ui0 - соответствующие амплитуды вынужденных колебаний.
Подставляя (5) в систему (4), получаем:
Нетрудно видеть, что при  все aj0 обращаются в нуль, то есть имеет место гашение колебаний. При некотором отклонении частоты гашения ωг от частоты возбуждения и, если учитывать рассеяние энергии, амплитуда вибраций в точках крепления регуляторов будет отличаться от нуля. При этом амплитуда поддается управлению, если изменять массу m.
все aj0 обращаются в нуль, то есть имеет место гашение колебаний. При некотором отклонении частоты гашения ωг от частоты возбуждения и, если учитывать рассеяние энергии, амплитуда вибраций в точках крепления регуляторов будет отличаться от нуля. При этом амплитуда поддается управлению, если изменять массу m.
Данное изобретение было проверено с помощью численного эксперимента. В упругую модель автомобиля были заложены следующие исходные данные: H1=Н2=100800 Н/м, γ1=0,01; m1=680 кг; ρ1=0,58 м2; a1=1,32 м; a2=1,08 м; r=10; m=3; 





 γ2=0,01; m2=1600 кг; ρ2=1,068 м2;
γ2=0,01; m2=1600 кг; ρ2=1,068 м2; 


 m3=250 кг; ρ3=0,45 м2;
m3=250 кг; ρ3=0,45 м2; 
 где H1, H2 - боковые жесткости шин передней и задней оси; m1, ρ1, m2, ρ2, m3, ρ3 - массы и радиусы инерции рамы, кузова и двигателя соответственно; γ1 - коэффициент рассеяние энергии в шине; γ2 - в подушках крепления кузова к раме; γ3 - в подушках крепления двигателя к раме; a1, a2 - расстояние от положения центра тяжести до передней и задней осей; r - число подушек крепления кузова к раме; m - число подушек крепления двигателя к раме;
где H1, H2 - боковые жесткости шин передней и задней оси; m1, ρ1, m2, ρ2, m3, ρ3 - массы и радиусы инерции рамы, кузова и двигателя соответственно; γ1 - коэффициент рассеяние энергии в шине; γ2 - в подушках крепления кузова к раме; γ3 - в подушках крепления двигателя к раме; a1, a2 - расстояние от положения центра тяжести до передней и задней осей; r - число подушек крепления кузова к раме; m - число подушек крепления двигателя к раме;  - расстояние от i-й подушки крепления кузова до центра масс рамы;
- расстояние от i-й подушки крепления кузова до центра масс рамы;  - жесткость в поперечном направлении i-й подушки крепления кузова к раме;
- жесткость в поперечном направлении i-й подушки крепления кузова к раме;  - расстояние от i-й подушки крепления кузова до центра масс кузова;
- расстояние от i-й подушки крепления кузова до центра масс кузова;  - расстояние от i-й подушки крепления двигателя до центра масс рамы;
- расстояние от i-й подушки крепления двигателя до центра масс рамы;  - жесткость в поперечном направлении i-й подушки крепления двигателя к раме;
- жесткость в поперечном направлении i-й подушки крепления двигателя к раме;  - расстояние от i-й подушки крепления двигателя до центра масс двигателя;
- расстояние от i-й подушки крепления двигателя до центра масс двигателя;
Собственная частота колебаний двигателя в поперечном направлении была найдена и равна 20,9 с-1. На фиг.3 показана АЧХ и ее часть для графического определения частоты собственных колебаний двигателя. Для пружин с жесткостью 2с=4400 Н/м требуемая масса электромагнитной жидкости равна 10 кг. Размер АФЧХ уменьшится примерно на 15%, при этом значительно снижается амплитуда колебаний автомобиля - на фиг.4 показаны линейные АФЧХ двигателя  и АФЧХ двигателя с предлагаемым гасителем
и АФЧХ двигателя с предлагаемым гасителем  По разработанный авторами изобретения методике был проведен частотный анализ курсовой устойчивости автомобиля.
По разработанный авторами изобретения методике был проведен частотный анализ курсовой устойчивости автомобиля.
Для вышеприведенных параметров упругой системы автомобиля были построены АФЧХ линейного, углового перемещения центра масс, а также перекрестная АФЧХ: W11(iω), W22(iω) и W12(iω) соответственно. По построенным АФЧХ фиксируют характерные частоты - экстремальные точки АФЧХ, соответствующие минимальному значению мнимой составляющей ωn и максимальному значению вещественной составляющей ωn max. По зафиксированным значениям ωn и ωn max определяют постоянные времени:

где Тn2, Tn1 - соответственно инерционная постоянная времени и постоянная времени демпфирования n-го колебательного звена. Смотри: Ю.Н.Санкин. Динамика несущих систем металлорежущих станков. - М.: Машиностроение, 1986. - 96 с.
В работе: Динамические характеристики вязкоупругих систем с распределенными параметрами. Санкин Ю.Н. Издательство Саратовского университета, 1977 г., дано теоретическое представление передаточной функции, являющейся математической моделью эквивалентной упругой системы:

где  - соответствующие матрицы коэффициентов усиления n-го колебательного звена
- соответствующие матрицы коэффициентов усиления n-го колебательного звена  обозначая
обозначая  N - число существенно проявляющихся витков АФЧХ.
N - число существенно проявляющихся витков АФЧХ.
Составим матрицу передаточных функций в виде:
Матрица передаточных функций характеризует динамику бокового перемещения точки, принятой за полюс, и динамику угловых перемещений вокруг этого полюса, и представляет математическую модель упругой системы автомобиля в боковом движении.
Дополняя матрицу передаточных функций уравнениями неголономной связи шин с дорожным покрытием:


где β1, β2 - коэффициент деформации шин передней и задней оси; Х - поперечная координата центра тяжести автомобиля; х - поперечная координата прямоугольника, вершины которого - точки соприкосновения колес с дорожным покрытием; Θ - угол, определяющий направление автомобиля; θ - угол, определяющий направление прямоугольника вершины которого - точки соприкосновения колес с дорожным покрытием; a1, а2 - расстояния от передней и задней оси до положения центра тяжести; V - скорость движения автомобиля.
Передаточная матрица, соответствующая уравнениям неголономной связи

Общая передаточная матрица Н системы является произведением W(iω) и W2(iω): Н=W(ω)·W2(iω).
Рассмотрим динамическую устойчивость системы в линейной постановке (Ю.Н.Санкин. Динамика несущих систем металлорежущих станков. - М.: Машиностроение, 1986. - 96 с.). При неустойчивости определитель матрицы Н-I, где I - единичная матрица, должен равняется нулю. Соответственно ни одно собственное значение матрицы Н не должно равняться 1. Характеристическое уравнение для рассматриваемого случая:
Раскрывая определитель, получим квадратное уравнение:
λ2-(а11+а22)λ+(а11·а22-а21·а12)=0
Строя АФЧХ λ1 и λ2 согласно вышеуказанному уравнению, определяем, при какой скорости АФЧХ соответствующего λ пересекает вещественную ось при значении, равном 1.
Анализ показал, что при применении предлагаемого гасителя повышается курсовая устойчивость (увеличение критической скорости на 33,5% - до 68,4 км/ч). На фиг.5 показаны годографы при скорости автомобиля V=68,4 км/ч: на 5 а - годограф для автомобиля с предлагаемым гасителем, на 5b - без гасителя.
Изобретение относится к деталям машин и может быть использовано в автомобильной технике. Сущность изобретения заключается в том, что устройство динамического гашения колебаний агрегата автомобиля снабжено адаптивной системой, состоящей из резервуара, объединенного с регулируемым насосом, клапаном сброса электромагнитной жидкости и соленоидным механизмом, соединенного гибким трубопроводом с бачком. В корпус бачка впаяна электропроводка. Бачок соединен с агрегатом, колебания которого гасятся, посредством двух пружин заданной жесткости, расположенных в направлении гашения колебаний. Адаптивная система снабжена электронным блоком управления, запитываемым от аккумуляторной батареи. Электронный блок управляет процессами перекачки электромагнитной жидкости с помощью насоса и клапана сброса электромагнитной жидкости. Электронный блок осуществляет обратную связь посредством вибродатчика и накладывает электромагнитное поле через обмотку на электромагнитную жидкость, находящуюся в бачка, и изменяет объем электромагнитной жидкости в бачке по формуле:

где с - жесткость пружин крепления; ω - частота, которую требуется погасить; ρ - плотность электромагнитной жидкости. Техническим результатом является гашение колебаний агрегата автомобиля в заданном вертикальном или поперечном направлении с учетом изменения возмущающего воздействия и динамических характеристик агрегата в заданном движении и устранение негативных последствий колебаний. 5 ил.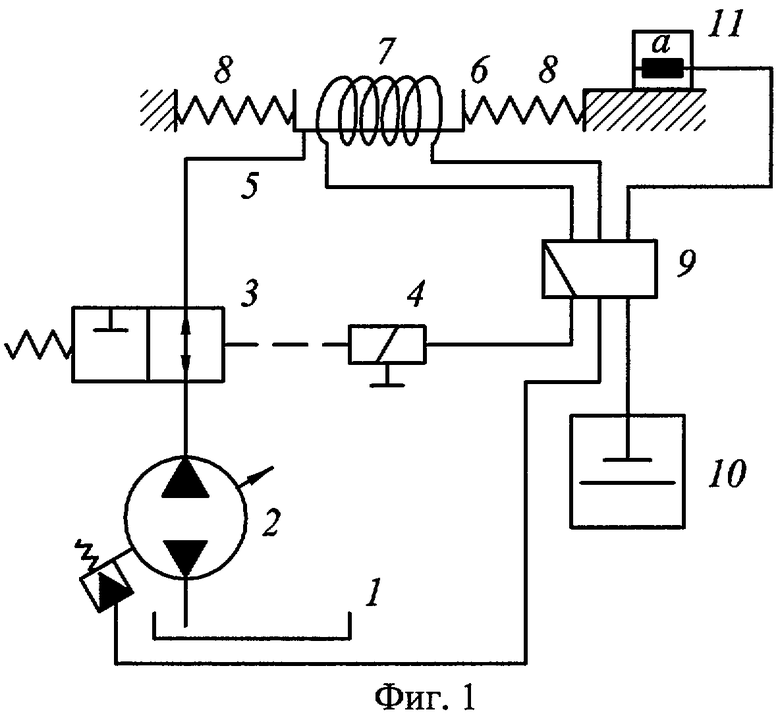
Устройство динамического гашения колебаний агрегата автомобиля с адаптивной системой, состоящей из резервуара, объединенного с регулируемым насосом, клапаном сброса электромагнитной жидкости и соленоидным механизмом, соединенного гибким трубопроводом с бачком, в корпус которого впаяна электропроводка, соединенным с агрегатом, колебания которого гасятся посредством двух пружин заданной жесткости, расположенных в направлении гашения колебаний, электронного блока управления, запитываемого от аккумуляторной батареи, управляющего процессами перекачки электромагнитной жидкости с помощью насоса и клапана сброса электромагнитной жидкости, осуществляющего обратную связь посредством вибродатчика и накладывающего электромагнитное поле через обмотку на электромагнитную жидкость, находящуюся в бачке, и изменяющего объем электромагнитной жидкости в бачке по формуле

где с - жесткость пружин крепления; ω - частота, которую требуется погасить; ρ - плотность электромагнитной жидкости.
| Успокоитель колебаний транспортного средства | 1981 |
|
SU1009892A1 |
| КОМБИНИРОВАННАЯ ПОДВЕСКА АВТОМОБИЛЯ | 1998 |
|
RU2149106C1 |
| АСИНХРОННАЯ МАШИНА | 0 |
|
SU278841A1 |
| US 4057129 А, 08.11.1977. | |||

