Изобретение относится к способам повышения активной безопасности транспортных средств и может быть использовано в автомобильной технике.
Существует способ контроля устойчивости транспортного средства, предназначенный для ограничения скорости движения транспортных средств на повороте (см. патент US 2003/0229438 A1 G 06 F 17/00), принятое за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при применении известного способа контроля, принятого за прототип, относятся: ограниченность режима контроля устойчивости только при повороте транспортного средства, отсутствие учета динамических характеристик транспортных средств.
Технический результат - ограничение максимальной скорости прямолинейного движения транспортного средства по условию курсовой устойчивости с учетом динамических характеристик транспортного средства в боковом движении.
Динамические характеристики упругой системы автомобиля изменяются, например, при загрузке транспортного средства пассажирами и играют важную роль в определении критической скорости. Возникновение неустойчивости особенно опасно для автомобилей, предназначенных для маршрутных перевозок пассажиров.
Особенность заключается в том, что математическая модель транспортного средства, используемая в критерии устойчивости, получается в процессе движения автомобиля и учитывает загрузку транспортного средства.
Сущность изобретения заключается в следующем: определяется критическая скорость автомобиля по условию его курсовой устойчивости.
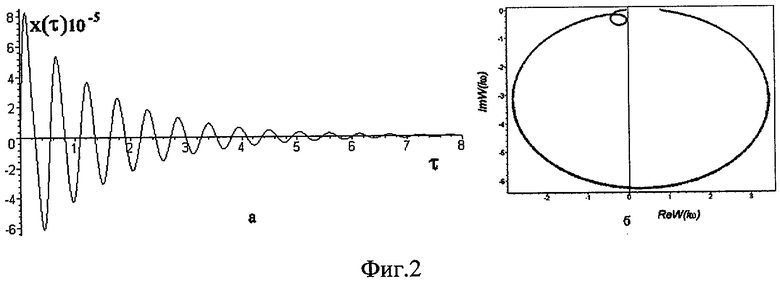
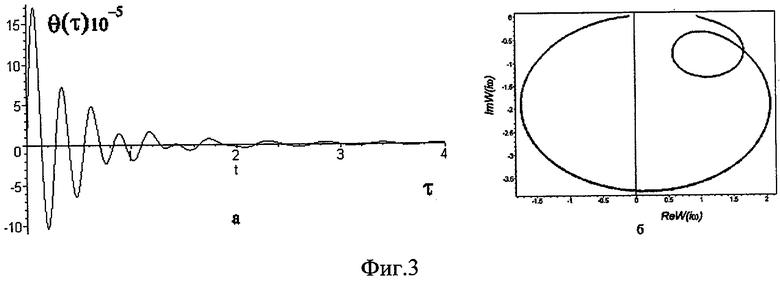
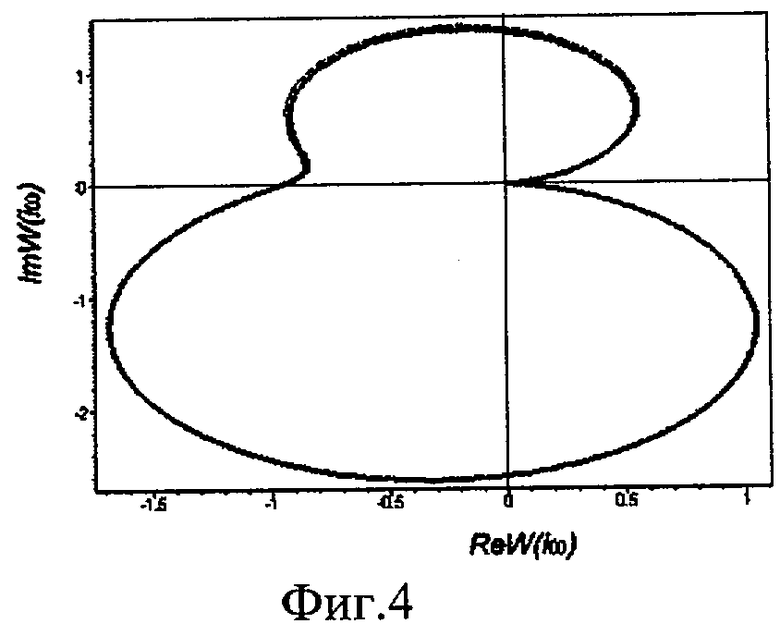
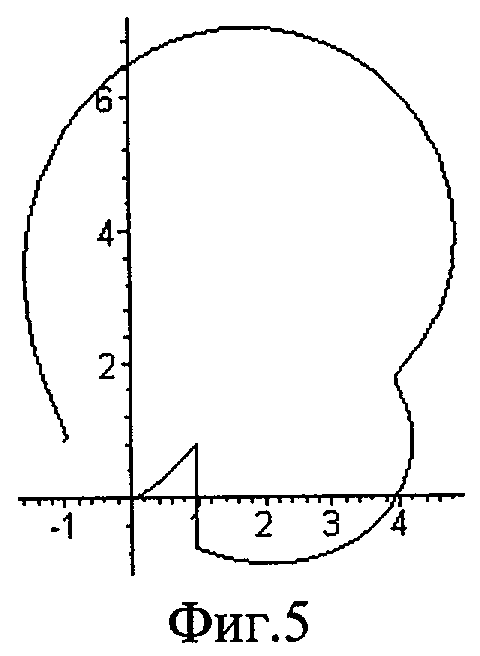
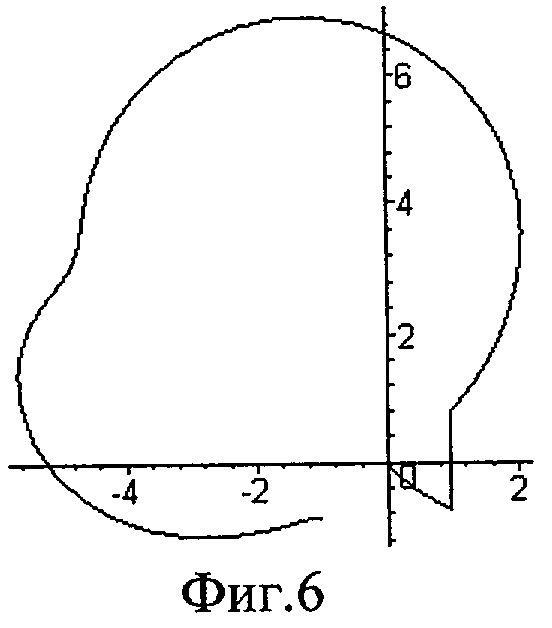
Сущность изобретения поясняется чертежами, где на Фиг.1 показана алгоритмическая схема работы коррелятора; на Фиг.2а - импульсная переходная функция, 2б - соответствующая амплитудно-фазо-частотная характеристика (АФЧХ) бокового перемещения; 3а - импульсная переходная функция, 3б - соответствующая АФЧХ поворота; Фиг.4 - перекрестная АФЧХ и Фиг.5 и 6 - АФЧХ λ1 и λ2 соответственно.
Рассматриваем автомобиль как линейную систему. На вход системы ограничения скорости движения со стороны дорожного профиля подается стационарный случайный сигнал, который в первом приближении считаем белым шумом. Автомобиль снабжен электронной системой, имеющей 4 датчика. Сигнал с датчиков дважды интегрируют с помощью последовательно включенных интеграторов, на выходе которых получают переменные составляющие бокового перемещения и угла поворота.
Сигнал подают на коррелятор, определяющий по переменным составляющим импульсные переходные функции объекта. Автокорреляционной функцией сигнала х - бокового перемещения, является импульсная функция вида
где δ(τ) - единичная импульсная функция.
При этом

где Θ(τ) - импульсная переходная функция
Меняя параметр сдвига τ и вычисляя взаимно корреляционную функцию входа и выхода объекта, получаем точки графика импульсной переходной функции объекта.
Получив переходную функцию для поперечного перемещения, коррелятор в автоматическом режиме переходит в режим построения импульсной переходной функции угла поворота.
Структурная схема коррелятора - устройства, выполняющего вышеуказанную операцию, показана на Фиг.1.
Снятие данных производится непосредственно во время движения, каждый раз после стоянки автомобиля, когда меняется его загрузка.
Преимуществом указанного способа является то, что объект исследуется в процессе нормальной эксплуатации, когда при длительной работе входной сигнал можно рассматривать как стационарный случайный процесс. При этом имеет место большая помехозащищенность.
Получают при помощи коррелятора зависимости x(t) и θ(t), то есть переходные функции для бокового перемещения и поворота, и подают их далее на электронное вычислительное устройство, которое находит соответствующие АФЧХ.
Для этого вычисляем интегралы
 ω
ω
где верхний предел интегрирования на самом деле является конечным и подбирается путем контрольных просчетов, когда значения ReW(iω) и ImW(iω) практически перестают меняться в зависимости от верхнего предела интегрирования.
В результате получим АФЧХ линейного и углового перемещения центра масс: W11(iω) и W22(iω) соответственно. По построенным АФЧХ фиксируют характерные частоты - экстремальные точки АФЧХ, соответствующие минимальному значению мнимой составляющей ωn и максимальному значению вещественной составляющей ωnmax. По зафиксированным значениям ωn и ωnmax определяют постоянные времени
где Тn2, Tn1 - соответственно инерционная постоянная времени и постоянная времени демпфирования n-го колебательного звена. Смотри: Ю.Н.Санкин. Динамика несущих систем металлорежущих станков. - М.: Машиностроение, 1986. - 96 с.
В работе: Динамические характеристики вязко-упругих систем с распределенными параметрами. Санкин Ю.Н. Издательство Саратовского университета, 1977 г., дано теоретическое представление передаточной функции, являющейся математической моделью эквивалентной упругой системы

где  - соответствующие матрицы коэффициентов усиления n-го колебательного звена
- соответствующие матрицы коэффициентов усиления n-го колебательного звена
 обозначая
обозначая 
N - число существенно проявляющихся витков АФЧХ.
Для получения перекрестных АФЧХ: W12(iω) и W21(iω) воспользуемся уже полученными значениями постоянных времени колебательных звеньев, коэффициенты усиления получим из выражения
При построении теоретической модели была выявлена зависимость знака перекрестных АФЧХ - второе колебательное звено имеет отрицательный знак, поэтому при получении коэффициентов усиления подставляется знак «минус».
Имея в распоряжении АФЧХ линейных и угловых перемещений центра масс, а также перекрестные АФЧХ, получим матрицу передаточных функций в виде
Матрица передаточных функций характеризует динамику бокового перемещения точки, принятой за полюс, и динамику угловых перемещений вокруг этого полюса, и представляет математическую модель упругой системы автомобиля в боковом движении.
Дополняя матрицу передаточных функций уравнениями неголономной связи шин с дорожным покрытием


где β1, β2 - коэффициент деформации шин передней и задней оси; Х - поперечная координата центра тяжести автомобиля; х - поперечная координата прямоугольника, вершины которого - точки соприкосновения колес с дорожным покрытием; Θ - угол, определяющий направление автомобиля; θ - угол, определяющий направление прямоугольника вершины которого -точки соприкосновения колес с дорожным покрытием; а1, а2 - расстояния от передней и задней оси до положения центра тяжести; V -скорость движения автомобиля.
Коэффициенты деформации шин, а также постоянные параметры - a1, a2, определяются для каждой модели автомобиля индивидуально и закладываются в исходные данные программы реализующей ограничение скорости.
Передаточная матрица, соответствующая уравнениям неголономной связи,
 Общая передаточная матрица Н системы является произведением W(iω) и W2(iω): Н=W(iω)·W2(iω).
Общая передаточная матрица Н системы является произведением W(iω) и W2(iω): Н=W(iω)·W2(iω).
Рассмотрим динамическую устойчивость системы в линейной постановке (Ю.Н.Санкин. Динамика несущих систем металлорежущих станков. - М.: Машиностроение, 1986. - 96 с.). При неустойчивости определитель матрицы Н - I, где I - единичная матрица, должен равняется нулю. Соответственно ни одно собственное значение матрицы Н не должно равняться 1.
Характеристическое уравнение для рассматриваемого случая
Раскрывая определитель, получим квадратное уравнение
λ2-(а11+a22)λ+(а11·а22 -а21·а12)=0
Строя АФЧХ λ1 и λ2 согласно вышеуказанному уравнению, определяем, при какой скорости АФЧХ соответствующего λ пересекает вещественную ось при значении, равном 1. Такая скорость и является критической, и ее значение, заниженное на 5%, закладывается в порог ограничения максимальной скорости.
Тарировка осуществляется на неподвижном автомобиле по ранее полученным данным на эталонном автомобиле.
Данное изобретение было проверено с помощью численного эксперимента, который показал практически полное совпадение значения порога скорости с субъективными ощущениями во время испытательных поездок. На фиг.2 и 3 представлены импульсные переходные функции и соответствующие им АФЧХ, полученные с помощью численного интегрирования. На фиг.4 - перекрестная АФЧХ. Для рассматриваемого случая (перегруженный автобус) АФЧХ λ1 и λ2, представленные на фиг.5 и фиг.6, пересекают ось в значении равном 1 при скорости V=12,4 м/с, которая и является критической. При превышении данной скорости возникает опасность сваливания в кювет или выезда на встречную полосу движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОГРАНИЧЕНИЯ СКОРОСТИ АВТОМОБИЛЯ В ЗАВИСИМОСТИ ОТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК В БОКОВОМ ДВИЖЕНИИ | 2004 |
|
RU2261188C1 |
| СПОСОБ ОГРАНИЧЕНИЯ СКОРОСТИ АВТОМОБИЛЯ В ЗАВИСИМОСТИ ОТ КОЛИЧЕСТВА ЕГО ПАССАЖИРОВ | 2010 |
|
RU2468937C2 |
| УСТРОЙСТВО ОГРАНИЧЕНИЯ СКОРОСТИ АВТОМОБИЛЯ В ЗАВИСИМОСТИ ОТ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ЖЕСТКОСТИ ДОРОЖНОГО ПОКРЫТИЯ В БОКОВОМ ДВИЖЕНИИ | 2005 |
|
RU2285626C1 |
| СПОСОБ ПОСТРОЕНИЯ МАТРИЦЫ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ АВТОМОБИЛЯ В БОКОВОМ ДВИЖЕНИИ | 2004 |
|
RU2264606C1 |
| УСТРОЙСТВО ДИНАМИЧЕСКОГО ГАШЕНИЯ КОЛЕБАНИЙ АГРЕГАТА АВТОМОБИЛЯ С АДАПТИВНОЙ СИСТЕМОЙ | 2004 |
|
RU2266826C1 |
| СПОСОБ ПОСТРОЕНИЯ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ВОДИТЕЛЯ АВТОМОБИЛЯ | 2005 |
|
RU2287850C1 |
| СПОСОБ ОЦЕНКИ ПРОФЕССИОНАЛЬНОСТИ ВОЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2465653C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ПОДВИЖНОГО УЗЛА ТРЕНИЯ ПО НАПРАВЛЯЮЩИМ СКОЛЬЖЕНИЯ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1994 |
|
RU2093816C1 |
| СПОСОБ РАСЧЕТА ПЕРЕХОДНЫХ ПРОЦЕССОВ В СЛОЖНЫХ ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ | 1999 |
|
RU2159938C1 |
| ДИНАМИЧЕСКИЙ МОНИТОРИНГ МОБИЛЬНЫХ НЕЛИНЕЙНЫХ ТЕХНИЧЕСКИХ СИСТЕМ | 2020 |
|
RU2745984C1 |
Изобретение относится к способам повышения активной безопасности транспортных средств. Способ ограничения скорости автомобиля заключается в том, что автомобиль рассматривают как линейную систему, на вход которой со стороны дорожного профиля поступает стационарный случайный сигнал с четырех датчиков, который дважды интегрируют с помощью последовательно включенных интеграторов, на выходе которых получают переменные составляющие бокового перемещения и угла поворота. Сигнал подают на коррелятор, определяющий по переменным составляющим импульсные переходные функции объекта, после чего сигнал подают на электронное вычислительное устройство, с помощью которого получают амплитудно-фазо-частотные характеристики путем интегрирования импульсных переходных функций и формирующее эквивалентную математическую модель автомобиля по характерным точкам амплитудно-фазо-частотных характеристик, затем строят амплитудно-фазо-частотные характеристики λ1 и λ2, итерационным методом находят такое значение скорости, при котором λ1 и λ2 пересекает вещественную часть в точке, равной 1, то есть Re(λ1)=Re(λ2)=1, Im(λ1)=Im(λ2)=0, после чего вырабатывают сигнал ограничения скорости. Техническим результатом является ограничение максимальной скорости прямолинейного движения транспортного средства по условию курсовой устойчивости с учетом динамических характеристик транспортного средства в боковом движении. 6 ил.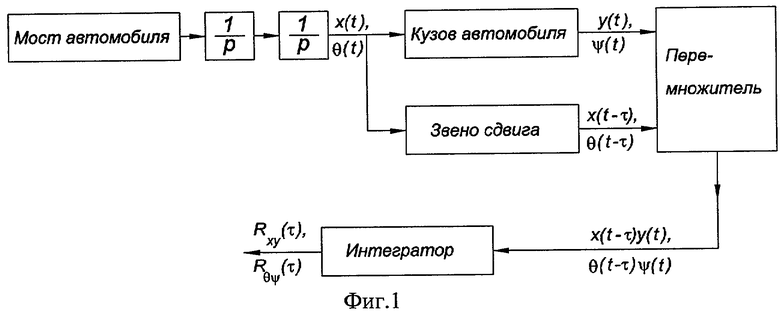
Способ ограничения скорости автомобиля в зависимости от динамических характеристик в боковом движении, заключающийся в том, что автомобиль рассматривают как линейную систему, на вход которой со стороны дорожного профиля поступает стационарный случайный сигнал с четырех датчиков, который дважды интегрируют с помощью последовательно включенных интеграторов, на выходе которых получают переменные составляющие бокового перемещения и угла поворота, сигнал подают на коррелятор, определяющий по переменным составляющим импульсные переходные функции объекта, после чего сигнал подают на электронное вычислительное устройство, с помощью которого получают амплитудно-фазо-частотные характеристики путем интегрирования импульсных переходных функций, формирующее эквивалентную математическую модель автомобиля по характерным точкам амплитудно-фазо-частотных характеристик, затем строят амплитудно-фазо-частотные характеристики λ1 и λ2, итерационным методом находят такое значение скорости, при котором λ1 и λ2 пересекают вещественную часть в точке, равной 1, то есть Re(λ1)=Re(λ2)=1, Im(λ1)=Im(λ2)=0, после чего вырабатывают сигнал ограничения скорости.
| US 6658342 В1, 02.12.2003 | |||
| US 6122584 А, 19.09.2000 | |||
| US 5305218 А, 19.04.1994 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ВОЗДЕЙСТВИЯ НА СКОРОСТЬ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2136513C1 |

