Изобретение относится к способам повышения активной безопасности транспортных средств и может быть использовано в автомобильной технике.
Существует устройство контроля устойчивости транспортного средства, предназначенное для ограничения скорости движения транспортных средств на повороте (система управления динамикой автомобиля VDC - стр. 668. Автомобильный справочник. Перевод с англ. Первое русское издание. - М.: ЗАО КЖИ «За рулем», 2002. - 896с.) и принятое за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при применении известного устройства ограничения скорости, принятого за прототип, относятся: ограниченность режима контроля устойчивости только при повороте автомобиля, отсутствие учета изменения динамических характеристик автомобиля в зависимости от загрузки или износа, или поломки какого-либо элемента крепления.
Технический результат - ограничение максимальной скорости прямолинейного движения автомобиля по условию курсовой устойчивости с учетом изменения динамических характеристик автомобиля в боковом движении.
Динамические характеристики упругой системы автомобиля изменяются, например, при загрузке его пассажирами и играют важную роль в определении критической скорости. Возникновение неустойчивости особенно опасно для автомобилей, предназначенных для маршрутных перевозок пассажиров.
Особенность заключается в том, что предлагаемое устройство ограничения максимальной скорости основывается на частотном критерии устойчивости, в котором используется математическая модель автомобиля, получаемая в процессе его движения и учитывающая его загрузку.
Сущность изобретения заключается в следующем: устройство ограничивает максимальную скорость автомобиля по условию его курсовой устойчивости.
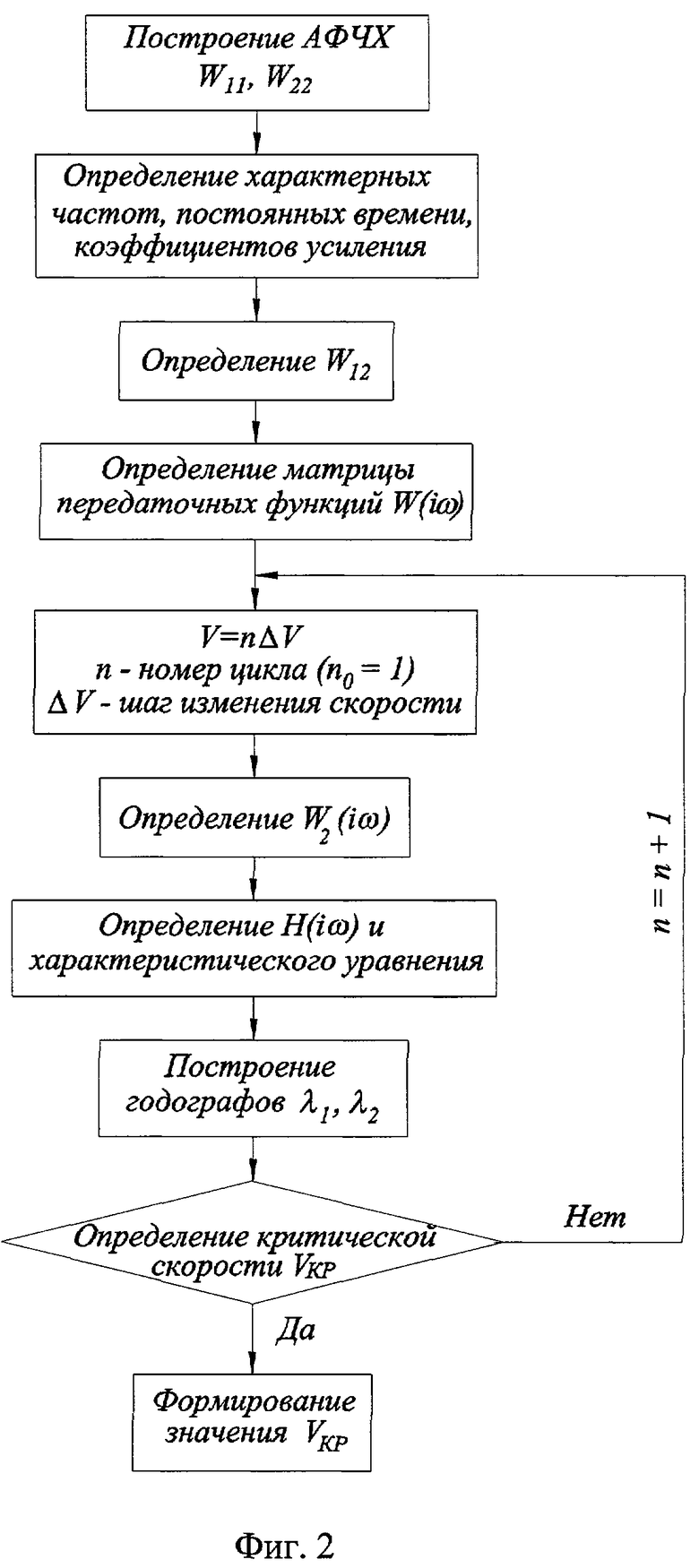
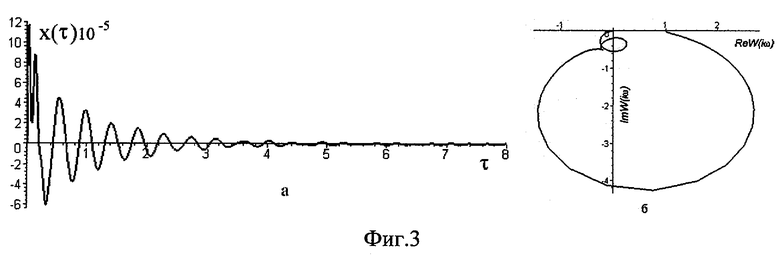
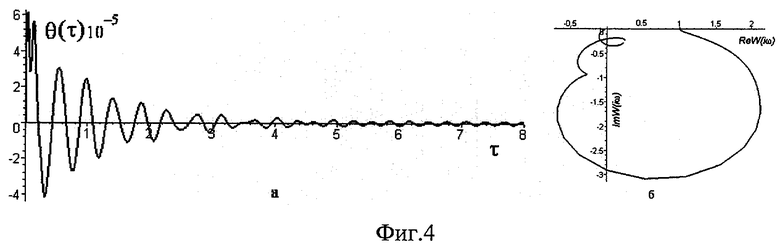
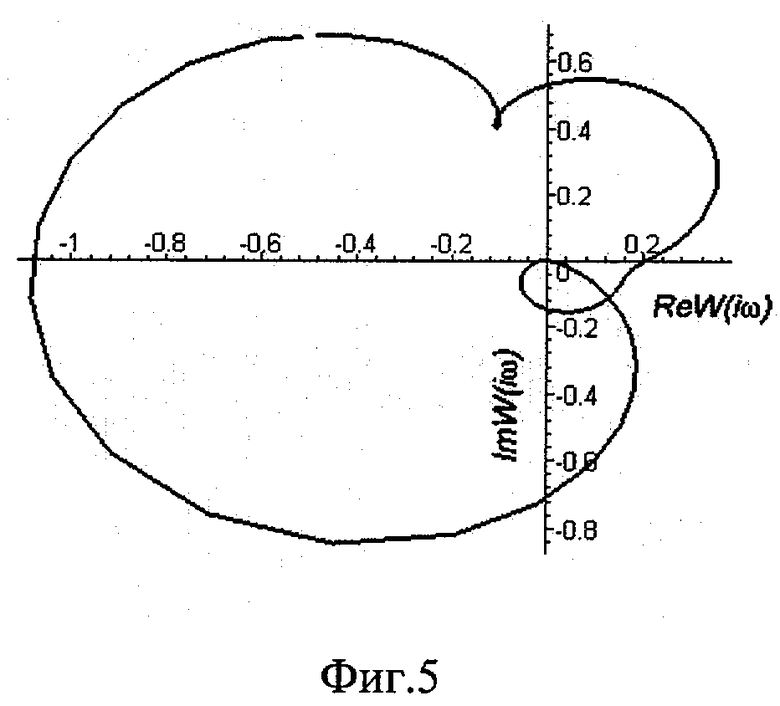
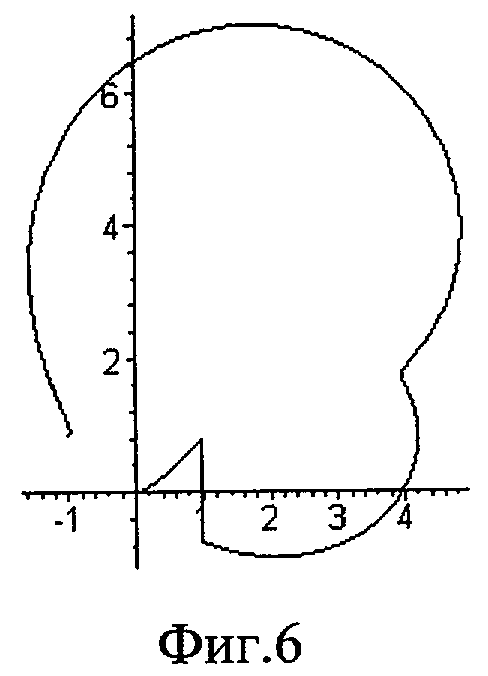
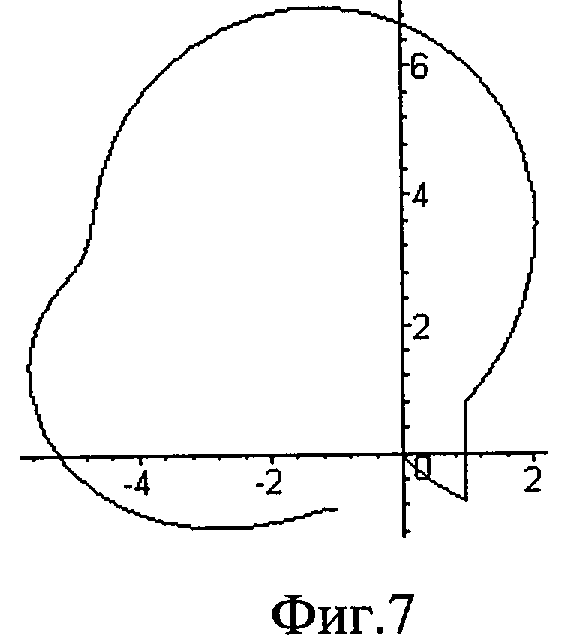
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема устройства; на фиг.2 - алгоритм работы электронного устройства определения критической скорости автомобиля; на фиг.3 а - импульсная переходная функция, 3 б - соответствующая амплитудно-фазочастотная характеристика (АФЧХ) бокового перемещения; 4 а - импульсная переходная функция, 4 б - соответствующая АФЧХ поворота; фиг.5 - перекрестная АФЧХ и фиг.6 и 7 - АФЧХ λ1 и λ2 соответственно.
Устройство содержит (фиг.1): два датчика 1 - бокового ускорения и ускорения поворота, установленные на мосту автомобиля; два последовательно включенных интегратора - 2, 3; два датчика 4 - бокового ускорения и ускорения поворота, установленные на кузове автомобиля; звено сдвига 5; перемножитель 6; интегратор 7; электронное устройство определения критической скорости автомобиля 8; датчик положения педали подачи топлива 9; датчик скорости нажатия педали подачи топлива 10; датчик числа оборотов вторичного вала коробки передач 11; рассогласователь 12 электронного блока управления впрыском топлива 13, топливных форсунок 14 и двигателя 15.
Работа устройства осуществляется следующим образом: на мосту автомобиля находятся два датчика 1, фиксирующие показания бокового ускорения моста и ускорения поворота моста. Сигналы с датчиков подаются на два последовательно включенных интегратора 2 и 3, где сигналы дважды интегрируются. На выходе интеграторов получают переменные составляющие бокового перемещения и угла поворота. Далее сигналы подаются на коррелятор, определяющий по переменным составляющим импульсные переходные функции объекта.
Коррелятор, расположенный на кузове автомобиля, с установленными на нем двумя датчиками 4 - бокового ускорения кузова и ускорения поворота кузова, звена сдвига 5, перемножителя 6 и интегратора 7. Получив переходную функцию для поперечного перемещения, коррелятор в автоматическом режиме переходит в режим построения импульсной переходной функции угла поворота.
Переходные функции подаются на вход электронного устройства определения критической скорости автомобиля 8, на выходе которого получают значение критической скорости автомобиля. Алгоритм вычисления значения критической скорости основан на частотном критерии устойчивости и представлен на фиг.2. Значение критической скорости автомобиля подается на рассогласователь 12.
Рассогласователь 12 разрывает связь между датчиком положения педали подачи топлива 9 и электронным блоком управления впрыском 13 и выдает эквивалентный сигнал сигналу датчика положения педали подачи топлива 9. Кроме того, на рассогласователь 12 поступают: сигнал частоты вращения вторичного вала коробки передач 11, выдающий с учетом передаточного числа главной пары и радиуса колеса мгновенную скорость движения автомобиля; скорость нажатия педали подачи топлива 10. Если значение мгновенной скорости автомобиля превышает значение критической скорости, то рассогласователь 12 выдает сигнал, соответствующий малому перемещению педали подачи топлива.
Электронный блок управления впрыском топлива 13, получая такой сигнал, полностью прекращает выдачу командных импульсов на топливную форсунку 14, последняя тем самым прекращает подачу топлива в цилиндры двигателя 15, обеспечивая тем самым процесс торможения автомобиля.
В случае необходимости (совершение маневра) при резком нажатии на педаль подачи топлива, что фиксирует датчик скорости нажатия педали подачи топлива 10, рассогласователь 12 передает прямой сигнал с датчика положения педали подачи топлива 9, то есть система ограничения максимальной скорости отключается и топливо подается по обычной схеме. Устройство ограничения скорости включается вновь в работу через 30 секунд, то есть за время, необходимое для завершения маневра.
Теоретические сведения, подтверждающие возможность осуществления изобретения с получением вышеуказанного технического результата, заключаются в следующем.
Рассматриваем автомобиль как линейную систему. На вход системы ограничения скорости движения со стороны дорожного профиля подается случайный сигнал, который в первом приближении считаем белым шумом. Автомобиль снабжен электронной системой, имеющей 4 датчика.
Сигнал подают на коррелятор, определяющий по переменным составляющим импульсные переходные функции объекта. Автокорреляционной функцией сигнала х - бокового перемещения является импульсная функция вида:

где δ(τ) - единичная импульсная функция.
При этом:

где Θ(τ) - импульсная переходная функция
Меняя параметр сдвига τ и вычисляя взаимно корреляционную функцию входа и выхода объекта, получаем точки графика импульсной переходной функции объекта.
Преимуществом указанного способа является то, что объект исследуется в процессе нормальной эксплуатации, когда при длительной работе входной сигнал можно рассматривать как стационарный случайный процесс. При этом имеет место большая помехозащищенность.
Получают при помощи коррелятора зависимости x(t) и θ(t), то есть переходные функции для бокового перемещения и поворота, и подают их далее на электронное вычислительное устройство, которое находит соответствующие АФЧХ.
Для этого вычисляем интегралы:
где верхний предел интегрирования на самом деле является конечным и подбирается путем контрольных просчетов, когда значения ReW(iω) и ImW(iω) практически перестают меняться в зависимости от верхнего предела интегрирования.
В результате получим АФЧХ линейного и углового перемещения центра масс: W11(iω) и W22(iω) соответственно. По построенным АФЧХ фиксируют характерные частоты - экстремальные точки АФЧХ, соответствующие минимальному значению мнимой составляющей ωn и максимальному значению вещественной составляющей ωnmax. По зафиксированным значениям ωn и ωnmax определяют постоянные времени:
где Тn2, Тn1 - соответственно инерционная постоянная времени и постоянная времени демпфирования n-го колебательного звена. Смотри: Ю.Н.Санкин. Динамика несущих систем металлорежущих станков. - М.: Машиностроение, 1986. - 96с.
В работе: Динамические характеристики вязко-упругих систем с распределенными параметрами. Санкин Ю.Н. Издательство Саратовского университета, 1977 г., дано теоретическое представление передаточной функции, являющейся математической моделью эквивалентной упругой системы:

где  - соответствующие матрицы коэффициентов усиления n-го колебательного звена
- соответствующие матрицы коэффициентов усиления n-го колебательного звена  обозначая
обозначая  N - число существенно проявляющихся витков АФЧХ.
N - число существенно проявляющихся витков АФЧХ.
Для получения перекрестных АФЧХ: W12(iω) и W21(iω) воспользуемся уже полученными значениями постоянных времени колебательных звеньев, коэффициенты усиления получают из выражения:
При построении теоретической модели была выявлена зависимость знака перекрестных АФЧХ - второе колебательное звено имеет отрицательный знак, поэтому при получении коэффициентов усиления подставляется знак «минус».
Имея в распоряжении АФЧХ линейных и угловых перемещений центра масс, а также перекрестные АФЧХ, получим матрицу передаточных функций в виде:

Матрица передаточных функций характеризует динамику бокового перемещения точки, принятой за полюс, и динамику угловых перемещений вокруг этого полюса и представляет математическую модель упругой системы автомобиля в боковом движении.
Дополняя матрицу передаточных функций уравнениями неголономной связи шин с дорожным покрытием:


где β1, β2 - коэффициент деформации шин передней и задней оси; Х - поперечная координата центра тяжести автомобиля; х - поперечная координата прямоугольника, вершины которого - точки соприкосновения колес с дорожным покрытием; Θ - угол, определяющий направление автомобиля; θ - угол, определяющий направление прямоугольника, вершины которого - точки соприкосновения колес с дорожным покрытием; а1, а2 - расстояния от передней и задней оси до положения центра тяжести; V - скорость движения автомобиля.
Коэффициенты деформации шин, а также постоянные параметры - a1, a2 определяются для каждой модели автомобиля индивидуально и закладываются в исходные данные программы реализующей ограничение скорости.
Передаточная матрица, соответствующая уравнениям неголономной связи

Общая передаточная матрица Н системы является произведением W(iω) и W2(iω):Н=W(iω)·W2(iω).
Рассмотрим динамическую устойчивость системы в линейной постановке (Ю.Н.Санкин. Динамика несущих систем металлорежущих станков. - М.: Машиностроение, 1986. - 96с.). При неустойчивости определитель матрицы Н-I, где I - единичная матрица, должен равняться нулю. Соответственно ни одно собственное значение матрицы Н не должно равняться 1. Характеристическое уравнение для рассматриваемого случая:
Раскрывая определитель, получим квадратное уравнение:

Строя АФЧХ λ1 и λ2 согласно вышеуказанному уравнению, определяем, при какой скорости АФЧХ соответствующего λ пересекает вещественную ось при значении, равном 1. Такая скорость и является критической.
На фиг.3 и 4 представлены импульсные переходные функции и соответствующие им АФЧХ, полученные с помощью численного интегрирования. На фиг.5 - перекрестная АФЧХ. АФЧХ λ1 и λ2 представлены на фиг.6 и фиг.7.
Изобретение относится к способам повышения активной безопасности транспортных средств и может быть использовано в автомобильной технике. Устройство ограничения скорости автомобиля в зависимости от динамических характеристик в боковом движении включает систему, прерывающую подачу топлива. Устройство содержит два датчика, установленных на мосту и фиксирующих показания бокового ускорения моста и ускорения поворота моста, два последовательно включенных интегратора, обрабатывающих сигналы с датчиков и выдающих переменные составляющие бокового перемещения и угла поворота, коррелятор, расположенный на кузове автомобиля, с установленными на нем двумя датчиками бокового ускорения кузова и ускорения поворота кузова, звено сдвига, перемножитель и интегратор, определяющий по переменным составляющим импульсные переходные функции объекта, которые подаются на вход электронного устройства определения критической скорости автомобиля, определяющего значение критической скорости с использованием частотного критерия устойчивости, а также рассогласователь, который разрывает связь между датчиком положения педали подачи топлива и электронным блоком управления впрыском при достижении действительной скорости автомобиля критической, тем самым ограничивая скорость автомобиля в прямолинейном движении. Техническим результатом является ограничение максимальной скорости прямолинейного движения автомобиля по условию курсовой устойчивости с учетом изменения динамических характеристик автомобиля в боковом движении. 7 ил.
Устройство ограничения скорости автомобиля в зависимости от динамических характеристик в боковом движении, включающее систему, прерывающую подачу топлива, отличающееся тем, что содержит два датчика, установленных на мосту и фиксирующих показания бокового ускорения моста и ускорения поворота моста, два последовательно включенных интегратора, которые обрабатывают сигналы с датчиков и выдают переменные составляющие бокового перемещения и угла поворота, коррелятор, расположенный на кузове автомобиля, с установленными на нем двумя датчиками бокового ускорения кузова и ускорения поворота кузова, звено сдвига, перемножитель и интегратор, определяющий по переменным составляющим импульсные переходные функции объекта, которые подаются на вход электронного устройства определения критической скорости автомобиля, определяющего значение критической скорости с использованием частотного критерия устойчивости, а также рассогласователь, разрывающий связь между датчиком положения педали подачи топлива и электронным блоком управления впрыском при достижении действительной скорости автомобиля критической, тем самым ограничивая скорость автомобиля в прямолинейном движении.
| Устройство контроля устойчивости транспортного средства | |||
| Автомобильный справочник | |||
| - М.: ЗАО КЖИ "За рулем", 2002, с.668, 896 | |||
| Устройство для ограничения скорости движения транспортного средства | 1985 |
|
SU1284855A1 |
| Устройство для ограничения угловой скорости | 1977 |
|
SU640250A1 |
| US 4120373 A, 17.10.1978. | |||

