Изобретение относится к математическим моделям, а именно к математическим моделям водителя автомобиля, и может быть использовано в системах управления, включающих оператора, от динамических характеристик которого зависит качество функционирования системы в целом, а именно устойчивость и качество переходных процессов.
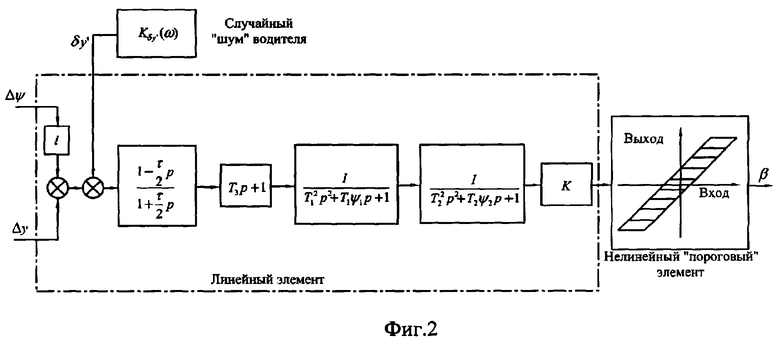
Существует способ построения математической модели автомобиля (Динамика системы дорога - шина - автомобиль - водитель. Под ред. А.А.Хачатурова. М., «Машиностроение». 1976. - 800 с., стр.456), основанный на предположении, что его структурная схема содержит: звено запаздывания, форсирующее звено, произведение двух колебательных звеньев и нелинейный элемент типа «люфт на выходе», причем коэффициенты структурной схемы подбираются по логарифмическим амплитудно-частотным характеристикам.
К причинам, препятствующим достижению указанного ниже технического результата при применении известного способа построения математической модели, принятого за прототип, относятся: низкая точность модели, поскольку подбор коэффициентов математической модели водителя осуществляется по спектральным плотностям на входе и выходе системы.
Технический результат - построение более точной адекватной модели водителя, соответствующей экспериментальным данным, с использованием ее в задачах устойчивости и управляемости автомобиля - определения уточненного значения критической скорости движения, оценки возможности управления автомобилем конкретным водителем в зависимости от его психофизиологического состояния и т.д.
Особенность заключается в том, что предлагаемый способ построения передаточной функции водителя, состоящей из трех составляющих: одного звена запаздывания и двух колебательных звеньев, основан на схеме измерения (фиг.1) курсового угла ψ движущегося автомобиля и угла поворота рулевого колеса β, с последующим получением корреляционных функций водителя ρψψ, ρψβ, соответствующих им спектральных плотностей Sψβ(iω) и Sψψ(iω), вычисляемых путем прямого преобразования Фурье, делением спектральных плотностей в результате определяется передаточная функция водителя, причем коэффициенты передаточной функции водителя определяют по амплитудно-фазочастотной характеристике передаточной функции водителя.
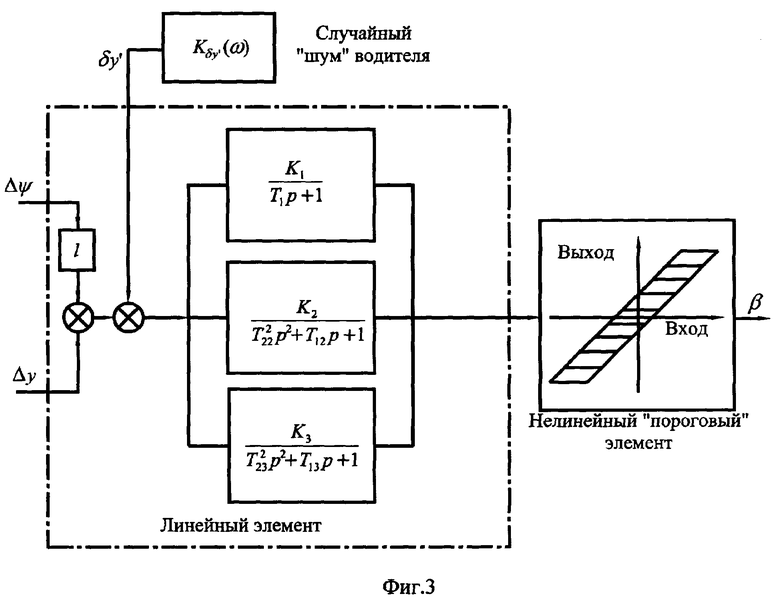
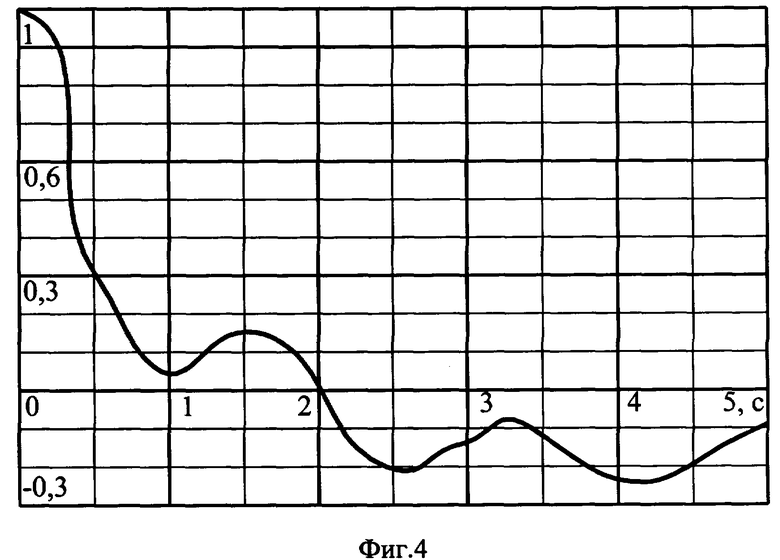
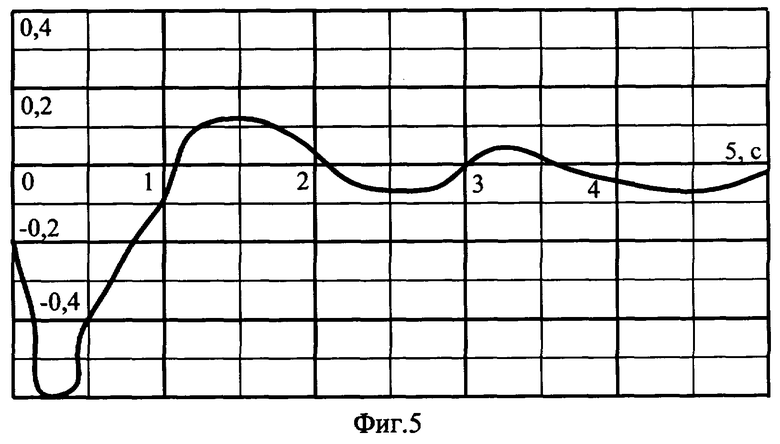
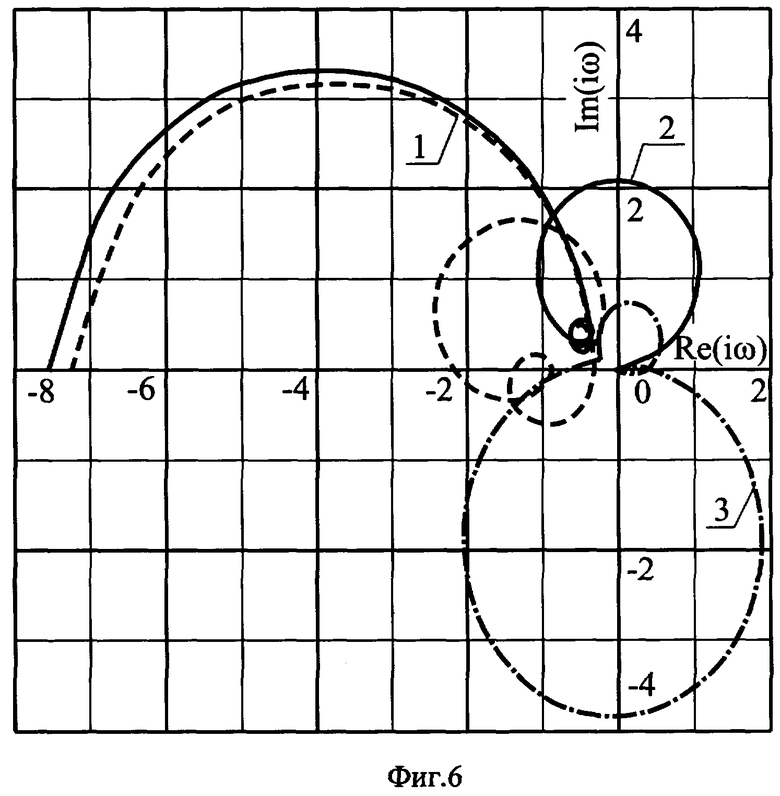
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема работы устройства определения передаточной функции водителя, на фиг.2 - структурная схема прототипа, на фиг.3 - предлагаемая структурная схема, на фиг.4 - исходная корреляционная функция курсового угла движения автомобиля ρψψ, на фиг.5 - взаимная корреляционная функция ρψβ, на фиг.6 - АФЧХ (амплитудно-фазочастотная характеристика) передаточной функции водителя.
С рассматриваемого объекта, управляемого водителем, автомобиля 1 (фиг.1) во время движения снимаются величины: курсового угла ψ и угол поворота рулевого колеса β, являющийся результатом реакции водителя на изменение курсового угла движения автомобиля от внешних воздействий. Значение угла поворота β(t) подается на звено сдвига 2, после чего значение β(t+τ) и значение ψ(t) одновременно подаются на перемножитель 3, результатом работы которого является сигнал ψ(t)β(t+τ), передаваемый на интегратор 4. В интеграторе 4 сигнал ψ(t)β(t+τ) преобразуется во взаимно-корреляционную функцию ρψβ. В блоке 5 получают спектральную плотность Sψβ(iω) путем преобразования Фурье функции ρψβ, полученной с блока 4.
Параллельно вышерассмотренному процессу, величина ψ(t+τ), после звена сдвига 6 и величина ψ(t) подаются на перемножитель 7, выдающий сигнал ψ(t)ψ(t+τ), проходящий через интегратор 8. Полученная в результате автокорреляционная функция ρψψ, подается на блок 9, где после преобразования Фурье получают спектральную плотность Sψψ(iω).
Таким образом, на блок 10 одновременно поступают функции спектральных плотностей Sψβ(iω) и Sψψ(iω), частное от деления которых является передаточной функцией Wψβ(iω). Передаточная функция Wψβ(iω) передается на идентификатор 11, где по графически построенной амплитудно-фазочастотной характеристике передаточной функции Wψβ(iω) определяются постоянные времени трех составляющих: одного звена запаздывания и двух колебательных звеньев:

Сущность изобретения основывается на следующих теоретических соображениях.
Рассмотрим ансамбль реализации случайных процессов ψ и β.
Величина ρψψ представляет собой автокорреляционную функцию.
Предполагая случайный процесс эргодическим, ее можно вычислить, определяя среднее значение произведения двух ординат процесса, разделенных промежутком времени τ. Автокорреляционная функция курсового угла будет:

Взаимная корреляционная функция случайных сигналов ψ и β:

т.е. представляет собой среднее значение произведения первого сигнала при некотором значении времени t на второй сигнал в момент времени, сдвинутый на τ.
Рассмотрим взаимные спектральные плотности Sψψ(iω) и Sψβ(iω) сигналов ψ и β по формулам:
На основе известных зависимостей между спектральными плотностями Sψψ(iω), Sψβ(iω) и передаточной функцией W(iω) имеем:

откуда получаем передаточную функцию:
Строим АФЧХ передаточной функции водителя. По построенным АФЧХ определяются постоянные времени. Для разомкнутого витка постоянная времени:  где ω1 - экстремальная точка витка, соответствует минимальному значению мнимой составляющей, а коэффициент усиления k1 соответствует вещественной составляющей точки начала витка.
где ω1 - экстремальная точка витка, соответствует минимальному значению мнимой составляющей, а коэффициент усиления k1 соответствует вещественной составляющей точки начала витка.
Для замкнутых витков фиксируем характерные частоты и берем экстремальные точки АФЧХ, соответствующие минимальному значению мнимой составляющей ωn и максимальному значению вещественной составляющей ωn max. По зафиксированным значениям ωn и ωn max определяют постоянные времени:

где Tn2, Тn1 - соответственно инерционная постоянная времени и постоянная времени демпфирования n-го колебательного звена. Смотри: Ю.Н.Санкин. Динамика несущих систем металлорежущих станков. - М.: Машиностроение, 1986. - 96 с.
В работе: Динамические характеристики вязко-упругих систем с распределенными параметрами. Санкин Ю.Н. Издательство Саратовского университета, 1977 г., дано теоретическое представление передаточной функции, являющейся математической моделью эквивалентной упругой системы:
где kn - соответствующие коэффициенты усиления n-го колебательного звена, N - число существенно проявляющихся витков АФЧХ.
Предлагаемая передаточная функция водителя состоит из суммы трех составляющих: одного звена запаздывания и двух колебательных звеньев, и представляется в следующем виде (фиг.3):

Данная линейная часть модели отражает физическое состояние водителя автомобиля, а именно степень запаздывания реакции на входной сигнал «курсовой угол» и «расстояние до средней линии коридора движения», а также учитывает влияние колебаний тела водителя при отработке вышеупомянутых входных сигналов. Нелинейное звено типа «люфт», как и в первоисточнике, считаем мало влияющим на линейную часть.
Предложенная модель позволяет получить более высокую точность для спектральных плотностей.
Данное изобретение было проверено с помощью численного эксперимента. Предлагаемая модель сопоставлялась с моделью водителя, предложенной в работе (Динамика системы дорога - шина - автомобиль - водитель. Под ред. А.А.Хачатурова. М., «Машиностроение». 1976. - 800 с., стр.456). В качестве исходных данных были использованы корреляционные функции из указанного источника (фиг.4, 5, соответственно рис.216, стр.461).
По предлагаемой методике была получена передаточная функция водителя:

На фиг.6 представлены АФЧХ передаточных функций водителя:
пунктирная линия 1 - получена экспериментальным путем, сплошная линия 2 - получена предлагаемым способом и штрихпунктирная линия 3 - по методике, описанной в прототипе.
Численный эксперимент показывает, что кривая 2 достаточно хорошо совпадает с кривой 1, в то время как кривая 3 не имеет даже качественного совпадения и не соответствует принятым в технике нормам точности.
Следовательно, предложенная модель для линейной части передаточной функции водителя дает более точный, а следовательно, и более эффективной результат. Аналогичные результаты получены для еще нескольких вариантов экспериментальных корреляционных функций.
Изобретение относится к математическим моделям и может быть использовано в системах управления, включающих оператора, от динамических характеристик которого зависит качество функционирования системы. Техническим результатом является повышение точности моделирования. Способ заключается в измерении курсового угла движущегося автомобиля и угла поворота рулевого колеса, вычислении на их основе корреляционных функций водителя, вычислении соответствующих им спектральных плотностей путем прямого преобразования Фурье, частным от деления которых является искомая передаточная функция, состоящая из одного звена запаздывания и двух колебательных звеньев. 6 ил.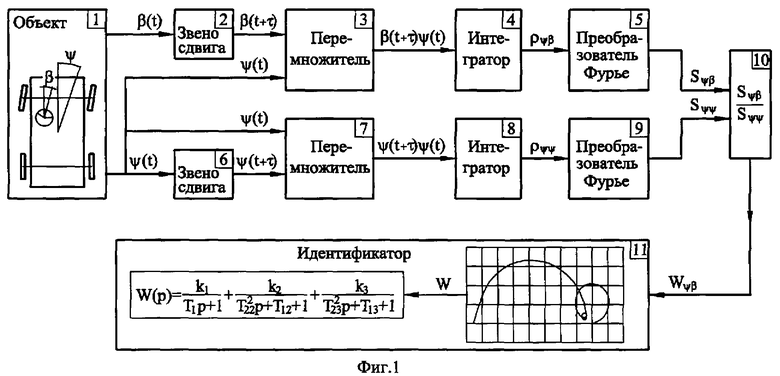
Способ построения передаточной функции водителя автомобиля, заключающийся в измерении курсового угла ψ движущегося автомобиля и угла поворота рулевого колеса β, являющегося результатом реакции водителя на изменение курсового угла движения автомобиля от внешних воздействий, с последующим получением корреляционных функций водителя ρψψ, ρψβ отличающийся тем, что по корреляционным функциям вычисляют соответствующие им спектральные плотности Sψβ(iω) и Sψψ (iω) путем прямого преобразования Фурье, частным от деления которых является передаточная функция водителя, состоящая из трех составляющих: одного звена запаздывания и двух колебательных звеньев:

где коэффициенты передаточной функции водителя определяют по характерным точкам экспериментальной амплитудно-фазово-частотной характеристики передаточной функции водителя, в частности для разомкнутого витка постоянная времени

где ω1 - экстремальная точка разомкнутого витка, соответствующая минимальному значению мнимой составляющей,
а коэффициент усиления k1 соответствует вещественной составляющей точки начала разомкнутого витка, для замкнутых витков k2, k3 - коэффициенты усиления колебательных звеньев,
 - инерционная постоянная времени,
- инерционная постоянная времени,
постоянная времени демпфирования n-го колебательного звена Tn1 определяется из выражения 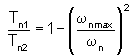 - где ωn минимальное значение мнимой составляющей АФЧХ,
- где ωn минимальное значение мнимой составляющей АФЧХ,
ωnmax - максимальное значение вещественной составляющей.
| ХАЧАТУРОВ А.А | |||
| Динамика системы дорога - шина - автомобиль - водитель | |||
| - М.: Машиностроение, 1976, с.456 | |||
| СПОСОБ УПРАВЛЕНИЯ ЭКВИДИСТАНТНЫМ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО И ЛИНЕЙНО-БОКОВОГО ОТКЛОНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТ ОПОРНОЙ ТРАЕКТОРИИ | 1992 |
|
RU2032926C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ | 1997 |
|
RU2142141C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2166789C2 |
| Способ определения параметров передаточной функции линейного динамического звена и устройство для его осуществления | 1986 |
|
SU1377826A1 |
| US 5175698 А, 29.12.1992. | |||

