Изобретение относится к военной технике, а именно к буксируемым, самоходным и другим артиллерийским орудиям.
Современные артиллерийские орудия оснащаются средствами автоматизации их навигации и управления наведением на цель. Важнейшей составной частью этих средств является гироскопическое устройство. Гироскопическое устройство вырабатывает информацию в полярной системе координат об углах курса, крена и тангажа орудия (углах его наклона относительно горизонта в поперечном и продольном направлениях). Эта информация используется для точного наведения орудия на цель. Для получения достоверных данных о названных углах гироскопическое устройство должно быть строго скоординировано относительно базы установки его на орудии и функционально к ней привязано. Это условие является обязательным для всех типов орудий.
При жестком креплении гироскопического устройства на орудии оно подвергается во время выстрела большим динамическим знакопеременным нагрузкам в широком диапазоне частот, включая собственную (резонансную) частоту колебаний гироблока, что оказывает весьма негативное влияние, как на точность угловых измерений, так и на ресурс гироблока.
В принятом за прототип артиллерийском орудии по заявке на изобретение на патент РФ № 2003107380 гироскопическое устройство установлено с возможностью его плоскопараллельного перемещения по трем взаимно перпендикулярным направлениям на подпружиненном параллелограммном механизме, что позволило снизить воздействие на устройство динамических нагрузок при выстреле до допустимых значений. Упругомассовые характеристики и геометрические параметры параллелограммного механизма подобраны таким образом, что собственная частота колебаний смонтированного на нем гироскопического устройства значительно ниже резонансной частоты колебаний гироблока, чем и обеспечивается ее фильтрация.
В последнее время в гироскопических устройствах применяются в качестве чувствительных элементов гироскопические датчики угловых скоростей и датчики ускорений, позволяющие понизить их чувствительность к знакопеременным динамическим перегрузкам (силам), уменьшить вес и габариты, упростить конструкцию, а также повысить точность измерений и ресурс гироблока. Информация от этих датчиков поступает в вычислительный комплекс орудия и посредством интегрирования перерабатывается в показания углов курса, крена и тангажа, используемые в системе навигации и автоматического наведения ствола орудия.
Однако эти датчики подвержены отрицательному влиянию возникающих при выстреле моментов динамических сил. Объясняется это следующим. Измеряемые датчиками в прямолинейном диапазоне максимальные угловые скорости значительно меньше аналогичных угловых скоростей, порождаемых при выстреле моментами динамических сил, что приводит к недопустимо большим погрешностям в вычислении углов.
Применение подпружиненного параллелограммного механизма позволяет уменьшить перегрузки на гироскопическое устройство от возникающих при выстреле динамических сил, но не уменьшает перегрузки от моментов этих сил, действие которых трансформируется через угловые скорости.
Целью изобретения является повышение точности стрельбы из орудия и исключение возможности повреждения гироскопического устройства путем уменьшения воздействия на чувствительные его элементы поступательных и вращательных колебаний орудия при стрельбе.
Предлагаемый амортизатор гироскопического устройства артиллерийского орудия лишен рассмотренного недостатка. Сущность предлагаемого изобретения состоит в том, что закрепленное на базе орудия неподвижное основание и нагруженное гироскопическим устройством подвижное основание соединены между собой двумя перекрещивающимися упругими (полыми или сплошными) стержнями, закрепленными в месте перекрещивания на одном из оснований и имеющими скользящее соединение своих концов с другим из оснований, то есть гироскопическое устройство установлено как с возможностью его плоскопараллельного перемещения по трем взаимно перпендикулярным направлениям, так и с возможностью его вращательного перемещения около этих направлений.
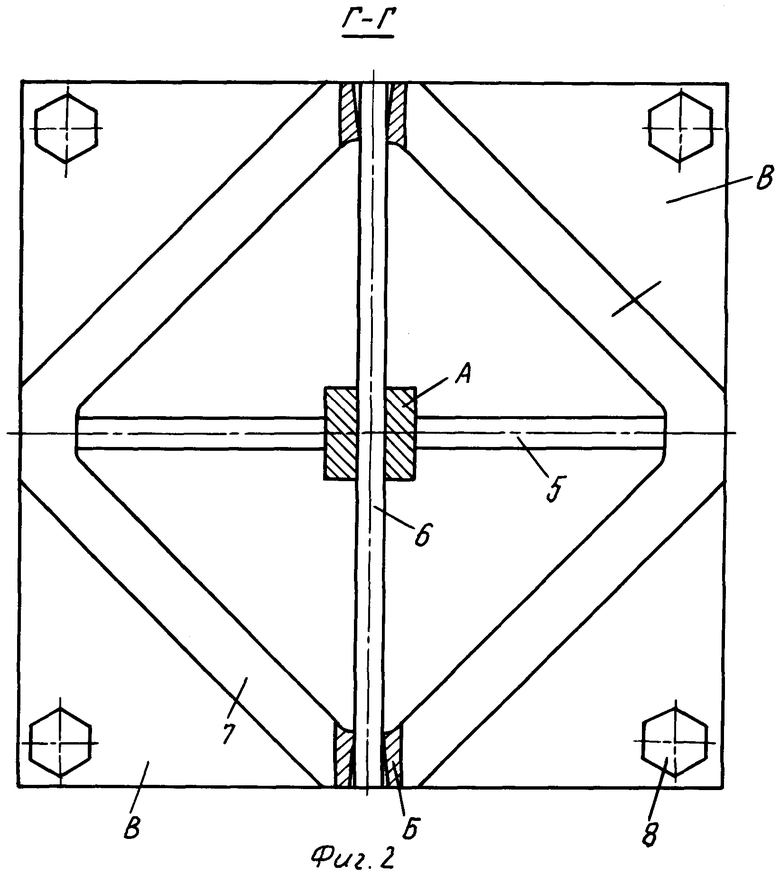
Изобретение поясняется чертежами, где на фиг.1 представлена часть проекции в поперечном сечении орудия, на фиг.2 - часть проекции в сечении, параллельном осям упругих стержней.
На базе 1 орудия, например, люльке, жестко закреплено башмаками 2 и болтами 3 неподвижное основание 4 с выступом А. В перекрещивающиеся отверстия выступа А запрессованы два упругих стержня 5 и 6, концы которых размещены в отверстиях шарниров Б подвижного основания 7, имеющего, например, форму рамки с периферийными лапами В для крепления гироскопического устройства. Стержни имеют высокоточную скользящую посадку в цилиндроконических отверстиях шарниров. Конические раструбы в шарнирах необходимы для компенсации углов изгиба стержней.
Крепление упругих стержней в месте перекрещивания может быть осуществлено и на подвижном основании. В этом случае они должны иметь шарнирное соединение с неподвижным основанием. На подвижном основании закреплено болтами 8 гироскопическое устройство 9.
Геометрические размеры и жесткость стержней определены исходя из допустимых перегрузок и допустимых угловых скоростей чувствительных элементов гироскопического устройства.
Функционирование предлагаемого амортизатора заключается в следующем.
При выстреле сила отдачи орудия и реактивная сила нарезов ствола раскладываются на продольную, вертикальную и поперечную составляющие. Под действием этих составляющих и реактивных сил упругости орудия и грунта и их моментов неподвижное относительно базы установки основание совершает поступательные и вращательные колебания. Подвижное основание с гироскопическим устройством в силу своей инерционности и упругой кинематической связи с неподвижным основанием отстает от него по фазе движения, обуславливая изгиб упругих стержней по всем направлениям.
После выстрела в начальной фазе движения упругий стержень 5 прогибается под действием продольной силы в ее направлении, а стержень 6 перемещается в отверстиях подвижного основания. По мере нарастания силы упругой деформации стержня 6 подвижное основание с гироскопическим устройством начинает совершать под действием этой силы и ее момента поступательное движение и вращение около своего центра масс. Стержень 5 при этом выпрямляется, а концы стержня 6 изгибаются в противоположных направлениях: передний вверх, задний вниз. При достижении максимального (расчетного) изгиба стержня 6 угловая скорость вращения подвижного основания с гироскопическим устройством становится равной нулю и под действием момента силы упругости оно начинает вращаться в противоположном направлении. Таким образом, плоскопараллельные перемещения подвижного и неподвижного относительно базы установки оснований и их вращение относительно оси стержня 5 имеют колебательный и в силу их наложения затухающий характер.
Силы упругости стержней и их моменты значительно меньше приложенных к неподвижному основанию динамических сил и моментов, благодаря чему снижается динамическая нагрузка на гироскопическое устройство и уменьшается угловая скорость его вращения. Аналогичные колебания неподвижное и подвижное относительно базы установки основания совершают в других плоскостях и около других осей. Все эти колебательные перемещения суммируются в пространстве и имеют сложный затухающий (после выстрела) характер. После затухания колебаний подвижное основание с гироскопическим устройством возвращается в исходное положение, чем и обеспечивается точность измерения углов курса, крена и тангажа орудия и, следовательно, точность его стрельбы.
Спектр частот колебаний подвижного основания значительно уже спектра частот колебаний неподвижного (относительно базы установки) основания. Верхним пределом частоты колебаний нагруженного гироскопическим устройством основания является его собственная частота колебаний. Частоты колебаний неподвижного основания, превышающие собственную частоту колебаний подвижного основания, и несущие ими перегрузки фильтруются и не передаются на гироскопическое устройство.
Собственная частота поступательных колебаний νn подвижного основания определяется упругомассовыми его характеристиками по зависимости циклической частоты его колебаний
где  Гц (1/С) - собственная частота поступательных колебаний нагруженного подвижного основания;
Гц (1/С) - собственная частота поступательных колебаний нагруженного подвижного основания;
 ,кгс/м - жесткость одного плеча упругого стержня;
,кгс/м - жесткость одного плеча упругого стержня;
 - масса подвижного основания с гироскопической нагрузкой;
- масса подвижного основания с гироскопической нагрузкой;
E=2,1·1010, кгс/м - модуль упругости материала стержня;
 - осевой момент инерции стержня;
- осевой момент инерции стержня;
t, м - длина плеча стержня;
d, м - диаметр стержня.
Собственная частота вращательных колебаний νв нагруженного подвижного основания определяется такими же параметрами по зависимости циклической частоты вращательных колебаний
где 
 - жесткость одного плеча стержня во вращательном движении;
- жесткость одного плеча стержня во вращательном движении;
 кгс - сила упругой деформации изгиба одного плеча стержня;
кгс - сила упругой деформации изгиба одного плеча стержня;
 рад - угол отклонения подвижного основания от исходного положения;
рад - угол отклонения подвижного основания от исходного положения;
f, м - стрела прогиба стержня на плече  ;
;
Ji, кгс·с2м - момент инерции нагруженного подвижного
основания около i-й оси.
При вращательных колебаниях около осей стержней Х и Z циклическая частота ωx,z определяется по зависимости
При вращательных колебаниях около направления Y, перпендикулярного осям стержней Х и Z, циклическая частота ωу определяется по зависимости
Угловые скорости вращательных колебаний подвижного основания под действием сил упругости стержней связаны с циклическими частотами соотношением  и в зависимости от направления вращения будут иметь вид:
и в зависимости от направления вращения будут иметь вид:
Из приведенных выражений следует, что допустимые для гироскопического устройства угловые скорости колебаний можно обеспечить за счет подбора соответствующих значений параметров d, l, J, m и f, при этом, чем меньше d и f и чем больше l, J и m, тем меньше угловые скорости колебаний.
Упругомассовые и геометрические параметры подвижного основания с гироскопическим устройством и упругих стержней конкретного орудия определяются и назначаются вышеизложенным способом, исходя из допустимых перегрузок, угловых скоростей и резонансной частоты колебаний гироблока применяемого гироскопического устройства, а также выбранной базы для его установки на орудии.
Применительно к самоходному артиллерийскому орудию 2С9, оснащенному блоком чувствительных элементов (БЧЭ) инерциальной системы ориентации (ИСО) с гироскопическими датчиками, можно обеспечить двукратное снижение угловых скоростей (от 420 об/с до 210 об/с) и динамических перегрузок при стрельбе за счет установки БЧЭ ИСО на перекрещивающихся упругих стержнях длиной 150 мм и диаметром 5 мм при суммарной массе нагруженного подвижного основания 4 кг  стреле прогиба плеча стержня 1 мм и при жестком креплении неподвижного основания на люльке. Собственная частота вращательных колебаний нагруженного подвижного основания находится в диапазоне 35...50 Гц (1/с) в зависимости от направления вращения. Собственные частоты поступательных колебаний подвижного основания при этом значительно ниже указанных значений.
стреле прогиба плеча стержня 1 мм и при жестком креплении неподвижного основания на люльке. Собственная частота вращательных колебаний нагруженного подвижного основания находится в диапазоне 35...50 Гц (1/с) в зависимости от направления вращения. Собственные частоты поступательных колебаний подвижного основания при этом значительно ниже указанных значений.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМОРТИЗАТОР ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2010 |
|
RU2420703C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2003 |
|
RU2230280C1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО НАВИГАЦИОННОГО АРТИЛЛЕРИЙСКОГО ПРИБОРА | 2008 |
|
RU2367880C1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО НАВИГАЦИОННОГО ПРИБОРА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2010 |
|
RU2418258C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2005 |
|
RU2300072C1 |
| СПОСОБ МЕХАНИЧЕСКИХ ИСПЫТАНИЙ УЗЛОВ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2442122C1 |
| ОГНЕСТРЕЛЬНОЕ ОРУДИЕ НЕФЕДОВА-ЛЕВКИНА | 1996 |
|
RU2143093C1 |
| СТЕНД ИМИТАЦИИ ВЫСТРЕЛА | 2000 |
|
RU2171440C1 |
| СПОСОБ ВЕДЕНИЯ ОГНЯ БОЕВОЙ МАШИНЫ | 2019 |
|
RU2729864C1 |
| БОЕВОЙ МОДУЛЬ СО СТАБИЛИЗАЦИЕЙ ЛИНИИ ПРИЦЕЛИВАНИЯ ВООРУЖЕНИЯ | 2023 |
|
RU2816100C1 |
Изобретение относится к артиллерийскому вооружению, в частности, к гироскопическим устройствам артиллерийских орудий. Сущность изобретения заключается в том, что гироскопическое устройство установлено на орудии на подвижном основании, соединенном с закрепленным на орудии неподвижным основанием двумя упругими сплошными или полыми перекрещивающимися стержнями. Указанные стержни закреплены в месте перекрещивания на одном из оснований и имеют скользящее соединение с другим из оснований, т. е. гироскопическое устройство установлено на орудии как с возможностью его плоскопараллельного перемещения по трем взаимно перпендикулярным направлениям, так и с возможностью вращательного перемещения около этих направлений. После затухания колебаний, возникающих при выстреле, гироскопическое устройство возвращается упругими стержнями в исходное положение. Реализация изобретения позволяет повысить точность стрельбы и исключить выход из строя гироскопического устройства. 2 ил.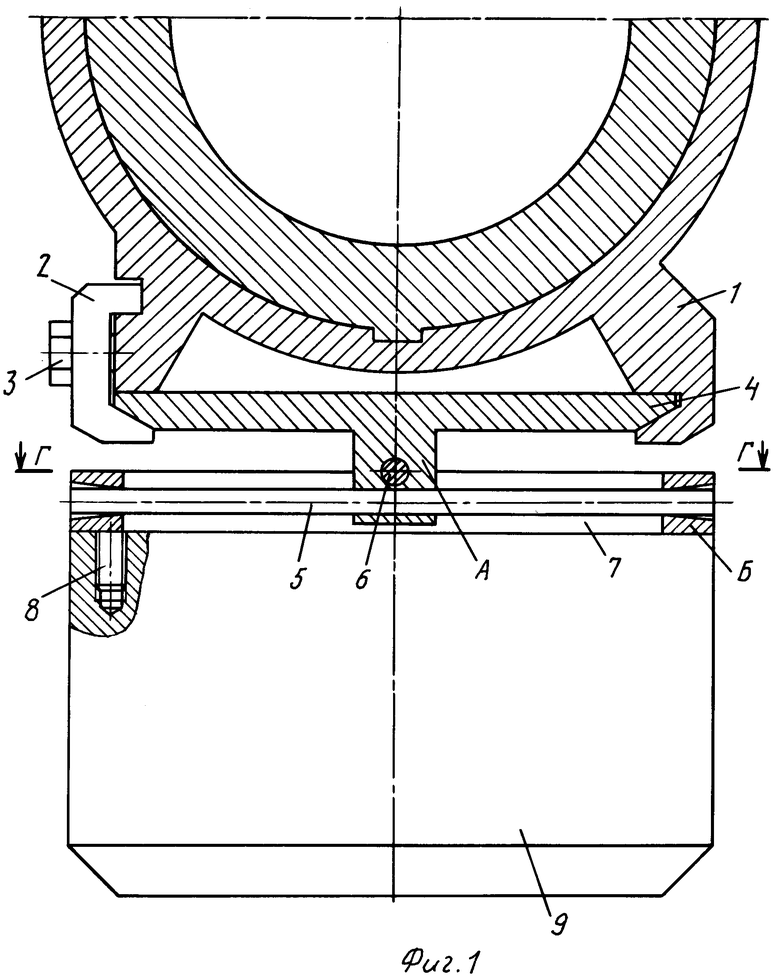
Амортизатор гироскопического устройства артиллерийского орудия, содержащий подвижные относительно друг друга основания, отличающийся тем, что основания соединены между собой двумя упругими сплошными или полыми перекрещивающимися стержнями, закрепленными в месте перекрещивания на одном из оснований и имеющими скользящее соединение своих концов с другим основанием.
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2003 |
|
RU2230280C1 |

