Изобретение относится к артиллерии, а именно к орудиям, смонтированным на транспортных средствах, частный вариант исполнения - самоходное артиллерийское орудие (САО), в том числе и буксируемым артиллерийским орудиям.
Современные самоходные артиллерийские орудия и буксируемые артиллерийские орудия оснащаются автоматизированными системами управления и наведения (АСУНО). В приборный состав АСУНО входит гироскопическое устройство, на которое возложены функции в автоматическом режиме вырабатывать в полярной системе координат информацию о приращении дирекционного (курсового) угла и об углах крена и тангажа артиллерийского орудия (АО). Эта информация используется для точного наведения ствола орудия на цель.
При движении, а особенно при стрельбе из АО, гироскопическое устройство, соединенное с базовым шасси, подвергается большим механическим перегрузкам в широком диапазоне частот различной пространственной ориентации, что вызывает выход из строя гироскопического устройства и, как следствие, нарушение работоспособности АО в автоматическом режиме.
Известно АО [1], в котором для поддержания его работоспособности в автоматическом режиме предусмотрено устройство крепления гироскопа, входящего в приборный состав АСУНО, к базовому шасси АО. Конструкция этого устройства включает в себя упругие элементы в установке гироскопического устройства, обеспечивающие значение отношения резонансной частоты колебаний гироскопа к собственной частоте колебаний нагруженного гироскопическим устройством верхнего основания при стрельбе больше единицы. Данное артиллерийское орудие принято за прототип.
Недостатком прототипа является свойственное последовательному соединению двух упругих систем их взаимовлияние друг на друга, в результате чего появляются дополнительные резонансные частоты. При этом частотный диапазон, в котором проявляются резонансные явления, значительно расширяется, что влияет на сохранение работоспособности гироскопического устройства и, как следствие, на функционирование артиллерийского орудия в автоматическом режиме работы.
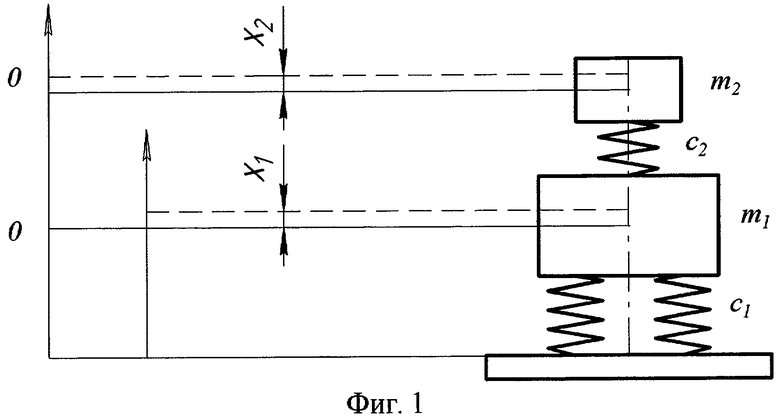
На фиг.1 представлена схема амортизации гироскопического устройства, где
с1 - жесткость внешней системы амортизации гироскопического устройства;
с2 - жесткость внутренней системы амортизации;
m1 - масса гироскопического устройства;
m2 - масса внутреннего амортизируемого элемента.
Собственные частоты системы определяются по формуле [2]:

При существующих определенных параметрах
с1=25·104 H/м; с2=20·104 Н/м;
Р1=20 кгс; Р2=4 кгс;
ω1=100 с-1; ω2=250 с-1;
f1=15,92 Гц; f2=39,79 Гц,
т.е. против ожидаемого ограничения спектра вибрационных воздействий на корпус гироскопического устройства до диапазона 10...15 Гц за счет обеспечения соотношения собственных частот внутреннего амортизационного устройства и платформы больше единицы мы будем иметь на гироскопическом устройстве повышенный уровень вибрации в значительно большем диапазоне частот из-за резонансных явлений. При этом снижение амплитуды колебаний внутреннего амортизируемого элемента относительно колебаний основания может быть получено лишь при частотах колебаний основания, соответствующих условию

ω*>269,26 c-1; f*>42,85 Гц.
Уменьшение амплитуды колебаний дополнительно амортизируемого элемента относительно корпуса гироскопического устройства (верхнего основания платформы) достигается при частотах колебаний основания, соответствующих условию:

ω>346 с-2; f>55 Гц.
Сохранение работоспособности гироскопического устройства, установленного на шасси артиллерийского орудия, и, соответственно, обеспечение возможности работы в автоматическом режиме самого орудия в такой широкой зоне вибрационных колебаний, усиленных за счет резонансных явлений, может быть достигнуто только за счет стабильной и высокой степени демпфирования колебаний гироскопического устройства.
В прототипе демпфирование колебаний гироскопического устройства, установленного на верхнем основании, происходит за счет трения свободных концов V-образных пружин о нижнюю поверхность верхнего основания и свободного конца одноплечей пружины о торец верхнего основания. При этом скольжение поверхностей друг по другу осуществляется во всех направлениях: в продольном - демпфирование колебаний продольных и вертикальных; в поперечном - демпфирование поперечных колебаний.
Согласно принципу Жуковского дополнительные относительные движения резко снижают величину силы трения трущихся поверхностей в зависимости от величины скоростей каждого из движений - в 3-5, до 30 раз.
К тому же различные значения перегрузок, изменяющиеся по случайным законам (колебательные движения), не способствуют сохранению стабильного значения трения. Все эти факторы снижают степень демпфирования колебаний гироскопического устройства, жестко закрепленного на верхнем основании платформы, и, как следствие, повышается вероятность сбоев в работе гироскопического устройства, снижается эффективность работы артиллерийского орудия. В худшем положении при этом находится поперечное (относительно линии выстрела) направление. Величина нормального усилия, создающего силу трения, не зависит от величины перегрузок вдоль этой оси, а определяется давлением между пружинами, вызванным вертикальными и продольными возмущениями, периодически меняющими свое значение, направление и даже переходящими от одной группы трущихся поверхностей к другой.
На основании приведенных факторов, являющихся следствием наличия двойной системы амортизации, явно видна невозможность обеспечения надежной работы артиллерийского орудия в автоматическом режиме как при движении, так и при стрельбе за счет соотношения собственных частот гироскопического устройства и платформы больше единицы.
Целью изобретения является повышение надежности работы артиллерийского орудия в автоматическом режиме.
В артиллерийское орудие, содержащее качающуюся часть, верхний станок или башню, нижний станок или шасси и гироскопическое устройство, расположенное на орудии и установленное с возможностью плоскопараллельного его перемещения относительно базы крепления по трем взаимно перпендикулярным направлениям минимум на одном шарнирном параллелограммном механизме, нижнее и верхнее основания которого подпружинены в вертикальном направлении с помощью двух V-образных пластинчатых пружин, нижним основанием закрепленных на нижнем основании параллелограммного механизма, а свободными лапами упирающихся в верхнее основание, и одноплечей пластинчатой пружиной, упирающейся свободным концом в торец верхнего основания, и поперечном направлении с помощью цилиндрических пружин, расположенных на шарнирных осях параллелограммного механизма, при этом в среднем положении рычаги параллелограмма расположены под тупым углом в плоскости горизонтального наведения в секторе стрельбы, введены упругие пластины по количеству рычагов параллелограммного механизма, закрепленные на верхнем основании с поджатием к верхним торцам рычагов параллелограммного механизма, которые выполнены скругленными для сохранения постоянства усилия поджатия.
В этом случае дифференциальное уравнение колебательного движения верхней платформы с гироскопическим устройством относительно нижней платформы приводится к виду

где сила трения
пропорциональна усилию N, сжимающему трущиеся поверхности, а коэффициент сухого трения скольжения k зависит только от материалов и состояния трущихся поверхностей.
Колебания будут затухающими, причем амплитуда уменьшается в арифметической прогрессии таким образом, что между двумя последующими максимальными отклонениями хi и xi+1/2, разделенными интервалом времени, равным полупериоду, выполняется соотношение
Xi+1/2=-xi+2a,
где  - формально представляет собой статическое смещение, вызванное силой трения. Колебательное движение прекратится, когда для очередного смещения окажется, что
- формально представляет собой статическое смещение, вызванное силой трения. Колебательное движение прекратится, когда для очередного смещения окажется, что  .
.
Изобретение поясняется фиг.2, на которой показана конструкция установки гироскопического устройства на артиллерийском орудии.
На кронштейне 1 артиллерийского орудия жестко закреплено болтами 2 нижнее основание 3 с шарнирными сухарями А параллелограммного механизма. На этом основании закреплены болтами 4 две V-образные пластинчатые пружины 5 и 6 с лапами Г и В и одноплечая пластинчатая пружина 13 с опорной консолью, упирающейся в верхнее основание 9. К нижнему основанию 3 присоединено посредством рычагов 7, расположенных под тупым углом к нижнему основанию 3, и осей 8 верхнее основание 9 с шарнирными сухарями Б. При этом верхнее основание 9, нижнее основание 3, рычаги 7 и оси 8 образуют параллелограммный механизм.
На нижней поверхности верхнего основания 9 закреплены пластины 11, упирающиеся с определенным усилием на радиусное окончание торцев рычагов 7 параллелограмма. Между рычагами 7 параллелограммного механизма установлены с предварительным натягом пружины 10, обеспечивающие возвратное движение верхнего основания 9 в поперечном направлении. Гироскопическое устройство 12 установлено и жестко закреплено на верхнем основании 9.
Устройство работает следующим образом.
Наибольшие нагрузки на гироскопическое устройство возникают при стрельбе из АО.
При выстреле орудие под действием силы отдачи перемещается вместе с нижним основанием 3 первоначально назад и вниз. Верхнее основание 9 с гироскопическим устройством 12 в силу своей инерционности и упругой связи с нижним основанием 3 отстает от него по фазе движения, обуславливая поворот рычагов 7 параллелограммного механизма относительно нижнего основания 3 по часовой стрелке и дополнительный прогиб сверх предварительного поджатия одноплечей пружины 13. При этом плоский конец пружины 13 скользит с трением по торцу верхнего основания 9, а лапы Г и В V-образных пружин 5 и 6 - по его нижней плоскости.
Под действием поперечной составляющей силы отдачи верхнее основание 9 смещается относительно нижнего основания 3 вдоль осей 8 вправо или влево в зависимости от направления приложенной силы, поджимая пружины 10 в том или другом направлении.
При колебаниях верхнего основания 9 по вертикальной оси из-за жесткой установки центра качания рычагов 7 относительно нее и радиусного выполнения конца рычагов 7 не происходит изменения давления пластин 11 на рычаги 7. Давление сохраняется постоянным и при поперечном движении независимо от движения по вертикальной оси, так как относительное движение рычага 7 (качание вокруг оси шарнира) имеет много меньшую амплитуду, и соответственно влияние этого движения на демпфирование поперечных колебаний незначительное. Напротив, стабильная величина поджатия пластин 11 улучшает демпфирование и вертикально-продольных колебаний (качание рычагов 7).
В настоящее время изготовлен опытный образец, который прошел полигонные испытания. Результаты испытаний подтверждают сохранение функционирования АО в автоматическом режиме работы.
Список литературы
1. Патент РФ №2230280, кл. F41G 5/16, 2004.
2. Суровцев Ю.А. Амортизация радиоэлектронной аппаратуры. М.: Советское радио, 1974. - с.24, 25.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО НАВИГАЦИОННОГО АРТИЛЛЕРИЙСКОГО ПРИБОРА | 2008 |
|
RU2367880C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2003 |
|
RU2230280C1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО НАВИГАЦИОННОГО ПРИБОРА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2010 |
|
RU2418258C1 |
| БОЕВАЯ СОЧЛЕНЕННАЯ МАШИНА И ОПОРНО-СЦЕПНОЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СОЧЛЕНЕНИЯ | 2007 |
|
RU2355993C2 |
| АМОРТИЗАТОР ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2004 |
|
RU2267076C1 |
| БОЕВОЙ МОДУЛЬ СО СТАБИЛИЗАЦИЕЙ ЛИНИИ ПРИЦЕЛИВАНИЯ ВООРУЖЕНИЯ | 2023 |
|
RU2816100C1 |
| АМОРТИЗАТОР ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2010 |
|
RU2420703C1 |
| СПОСОБ ПОДГОТОВКИ САМОХОДНОГО АРТИЛЛЕРИЙСКОГО ОРУДИЯ К ЭКСПЛУАТАЦИИ В УСЛОВИЯХ НИЗКИХ ТЕМПЕРАТУР | 2023 |
|
RU2823196C1 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1999 |
|
RU2169337C2 |
| СПОСОБ МОДЕРНИЗАЦИИ САМОХОДНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2008 |
|
RU2395780C2 |
Изобретение относится к артиллерии, в частности к орудиям с системой наведения. Сущность изобретения заключается в том, что гироскопическое устройство (гироблок) установлено на орудии с возможностью плоскопараллельного перемещения относительно базы крепления по трем взаимно перпендикулярным направлениям минимум на одном шарнирном параллелограммном механизме. Нижнее и верхнее основания механизма подпружинены относительно друг друга в вертикальном и горизонтальном направлениях таким образом, что рычаги параллелограмма в состоянии покоя расположены под тупым углом к плоскости горизонтального наведения в секторе стрельбы. На нижней поверхности верхнего основания закреплены упругие пластины, количество которых соответствует количеству рычагов параллелограмма, с возможностью постоянного поджатия к верхним торцам рычагов параллелограммного механизма. Реализация изобретения позволяет повысить надежность работы артиллерийского орудия в автоматическом режиме. 1 з.п. ф-лы, 2 ил.
1 Артиллерийское орудие, содержащее качающуюся часть, верхний станок или башню, нижний станок или шасси и гироскопическое устройство, расположенное на орудии и установленное с возможностью плоскопараллельного перемещения относительно базы крепления по трем взаимно перпендикулярным направлениям как минимум на одном шарнирном параллелограммном механизме, нижнее и верхнее основания которого подпружинены в вертикальном направлении с помощью двух V-образных пластинчатых пружин, нижним основанием закрепленных на нижнем основании параллелограммного механизма, а свободными лапами упирающихся в верхнее основание, и одноплечей пластинчатой пружиной, упирающейся свободным концом в торец верхнего основания и в поперечном направлении с помощью цилиндрических пружин, расположенных на шарнирных осях параллелограммного механизма, при этом в среднем положении рычаги параллелограмма расположены под тупым углом в плоскости горизонтального наведения в секторе стрельбы, отличающееся тем, что оно снабжено упругими пластинами, количество которых соответствует количеству рычагов параллелограмма, закрепленными на верхнем основании с возможностью постоянного поджатия к верхним торцам рычагов параллелограммного механизма.
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2003 |
|
RU2230280C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| US 4326447 А, 27.04.1982 | |||
| DE 3332795 A1, 28.03.1985 | |||
| DE 3241665 A1, 17.05.1984. | |||

