Изобретение относится к военной технике, а именно к буксируемым, самоходным и другим артиллерийским орудиям.
Современные артиллерийские орудия оснащаются средствами автоматизации их навигации и управления наведением на цель. Важнейшей составной частью этих средств является гироскопическое устройство. Гироскопическое устройство вырабатывает информацию в полярной системе координат об углах курса, крена и тангажа орудия (углах его наклона относительно горизонта в поперечном и продольном направлениях). Эта информация используется для точного наведения орудия на цель. Для получения достоверных данных о названных углах гироскопическое устройство должно быть скоординировано относительно базы установки его на орудии и функционально к ней привязано. Это условие является обязательным для всех типов орудий.
При жестком креплении гироскопического устройства на орудии оно подвергается во время выстрела большим динамическим нагрузкам в широком диапазоне частот, включая собственную (резонансную) частоту гироблока, что оказывает весьма негативное влияние как на точность угловых измерений, так и на ресурс гироблока.
В принятом за прототип амортизаторе артиллерийского орудия патент РФ №2230280 F41G 5/16 гироскопическое устройство установлено с возможностью плоскопараллельного перемещения по трем взаимно - перпендикулярным направлениям на подпружиненном параллелограммном механизме, что позволило снизить динамические нагрузки на него при выстреле до допустимых значений.
Параллелограммный механизм в этом изобретении образован верхней подвижной и нижней неподвижной платформами с шарнирными башмаками, соединенными между собой наклонными рычагами и их осями. На нижней платформе закреплены неподвижно две V-образные и одна одноплечая пружины, а в поперечном направлении на верхних осях рычагов установлены цилиндрические пружины.
Силовые параметры (жесткости) перечисленных пружин значительно ниже динамических нагрузок орудия, чем и достигается их гашение.
Инерционные параметры нагруженной прибором подвижной верхней платформы таковы, что в комплексе с жесткостями всех указанных пружин обеспечивают ей собственную частоту колебаний ниже уровня опасной резонансной частоты гироблока, чем и достигается ее фильтрация.
Частичное гашение вынужденных колебаний несущей платформы достигается при ее сближении с неподвижной платформой за счет рассеивания энергии на преодоление сил трения V-образных пружин по ее нижней поверхности.
Наряду с перечисленными достоинствами рассматриваемое изобретение имеет ряд серьезных недостатков, основными из которых являются:
- недостаточная точность взаимного расположения составных элементов конструкции параллелограммных механизмов, влекущая возможность перекосов платформ и заедания в шарнирных их соединениях;
- большое количество подвижных соединений деталей параллелограммных механизмов, что приводит к излишним суммарным люфтам в их сопряжениях и, следовательно, к резкому снижению точности плоскопараллельной координации платформ и точности измерения прибора;
- отсутствие демпфирования за счет рассеивания энергии колебаний на преодоление сил трения при удалении платформ относительно друг друга, что приводит к увеличению периода затухания колебаний несущей платформы;
- отсутствие принудительного ограничения амплитуды колебаний несущей платформы во внештатной ситуации (например, при ударе передней части шасси орудия о непредвиденную преграду), что может привести к повреждению или выходу из строя одноплечей пружины.
Задачей настоящего изобретения является устранение вышеперечисленных недостатков для обеспечения условий высокой точности измерения навигационного прибора, а следовательно, повышения точности стрельбы.
Поставленная задача достигается тем, что в амортизирующем устройстве навигационного артиллерийского прибора, содержащем соединенные двумя шарнирными параллелограммными механизмами верхнюю и нижнюю платформы, две закрепленные на нижней платформе V-образные пластинчатые пружины с верхними лапами, одноплечую пластинчатую пружину с консолью для упора в передний торец верхней платформы и поперечные цилиндрические пружины, верхние и нижние стороны параллелограммных механизмов выполнены в виде брусков, закрепленных по краям платформ с помощью выступов, входящих в ответные параллельные пазы платформ, а наклонные стороны параллелограммных механизмов выполнены в виде двух пар зеркального отражения шатунов, состоящих из рычагов с запрессованными в них поперечными осями, выступающими с обеих сторон, на нижних концах осей задних шатунов установлена центрирующая трубка с суммарным зазором относительно брусков, равным максимальному относительному смещению платформ, а на верхних концах осей шатунов установлены поперечные пружины, поджатые распорными трубками.
Кроме того, на одноплечую пластинчатую пружину наложена другая аналогичная по форме пластинчатая пружина, закрепленная на нижней платформе, а нижние концы рычагов заканчиваются клинообразными выступами.
Первый из указанных недостатков устранен за счет введения в конструкцию амортизирующего устройства двух пар (верхней и нижней) брусков с выступами спереди и сзади, входящими с минимальными зазорами в соответствующие пазы верхней и нижней платформ. Второй недостаток устранен за счет замены четырех рычагов, входящих в восемь разъемных соединений с подвижной посадкой (зазорами) с четырьмя осями, четырьмя шатунами - неразъемными сборками четырех рычагов с восемью осями. Такое выполнение параллелограммных механизмов позволяет обеспечивать предельную точность параллелограммов как по равенству противоположных его сторон, так и по их параллельности, а также облегчает технологию изготовления и сборки устройства.
Третий недостаток исключен за счет наложения на одноплечую пружину другой аналогичной по форме пружины-демпфера, благодаря чему при работе амортизирующего устройства между ними возникает трение и рассеивание энергии колебательного движения несущей платформы.
Четвертый недостаток исключен за счет выполнения на нижних концах рычагов клинообразных выступов, ограничивающих угол их поворота при удалении верхней платформы от нижней.
Центрирующая трубка необходима для юстировки взаимного положения параллелограммов при сборке устройства. Распорные трубки между поперечными пружинами тоже служат для упрощения сборки амортизирующего устройства.
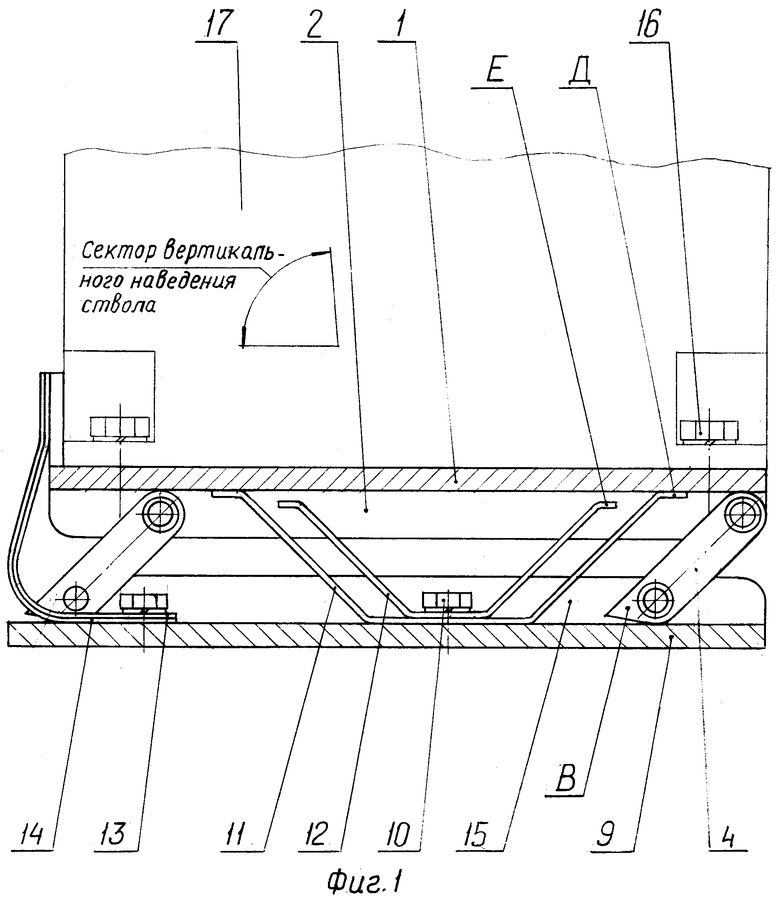
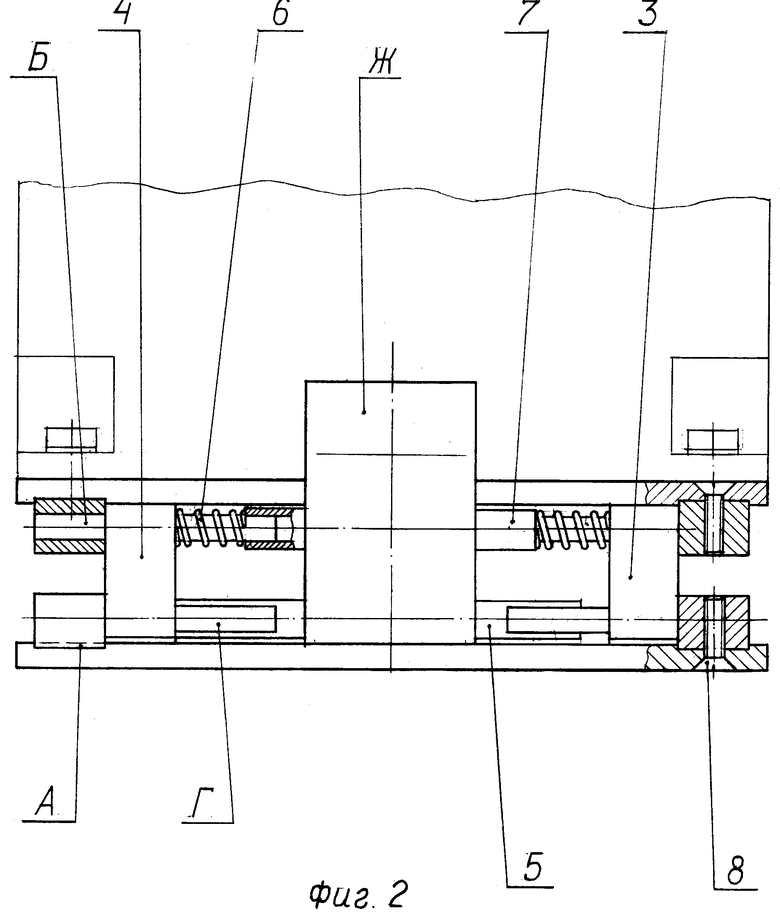
Изобретение поясняется чертежами, где на фиг.1 представлена профильная (боковая) проекция амортизирующего устройства, на фиг.2 - фронтальная (передняя) его проекция.
Представленное на приведенных чертежах амортизирующее устройство состоит из верхней и нижней платформ в сборе, соединенных между собой шарнирными параллелограммными механизмами. По краям верхней (подвижной) платформы 1 и нижней (неподвижной) платформы 9 закреплены с помощью выступов А бруски 2 и 15, соединенные между собой шатунами 3 и 4. Каждый шатун выполнен в виде рычага с запрессованными в него двумя поперечными осями, выступающие концы которых Б расположены с возможностью поворота в отверстиях брусков 2 и 15, а противоположные выступающие концы осей: нижние Г соединены надетой на них центрирующей трубкой 5, а на верхние надеты цилиндрические пружины 6 и распорные трубки 7.
На нижней (неподвижной) платформе 9 (фиг.1) закреплены болтами 10 две V-образные пластинчатые пружины 11 и 12 с лапами Д и Е и две одноплечие пластинчатые пружины 13 и 14 с консолями Ж (фиг.2) для упора в подвижную платформу.
На верхней платформе амортизирующего устройства крепится болтами 16 навигационный прибор 17 с гироскопическим блоком. Амортизирующее устройство с установленным на нем навигационным прибором крепится болтами к горизонтальной базе орудия.
Функционирование предлагаемого амортизирующего устройства заключается в следующем.
При выстреле нижняя платформа 9 перемещается вместе с орудием под действием силы отдачи сначала назад и вниз. Верхняя (подвижная) платформа 1 с навигационным прибором 16 в силу своей инерционности и упругости кинематической связи с нижней платформой отстает от нее по фазе движения, обусловливая поворот шатунов по часовой стрелке и дополнительный прогиб сверх предварительного поджатия одноплечих пружин 13 и 14 в том же направлении. При этом консоли Д пружин скользят с трением как относительно друг друга, так и относительно торца платформы. В этот период движения на верхнюю платформу с прибором воздействуют только силы их тяжести, силы упругости одноплечих пружин и убывающей силы упругости V-образной пружины 11, которые в сумме значительно меньше возникающих при выстреле перегрузок.
Под действием сил упругости одноплечих пружин и сил тяжести верхняя платформа с прибором также приходит в ускоренное движение по направлению назад и вниз, в то время как нижняя платформа после торможения совершает возвратное движение под действием сил упругости грунта и элементов конструкции орудия.
Под действием поперечной составляющей силы отдачи верхняя платформа смещается относительно нижней вдоль осей шатунов вправо или влево, поджимая поперечные пружины в том или другом направлении, и после определенного их поджатия совершает возвратное движение.
Силы упругости всех пружин амортизирующего устройства значительно меньше прилагаемых со стороны орудия сил, что и позволяет снизить прилагаемые к прибору перегрузки. При этом колебания несущей платформы имеют затухающий характер благодаря трению лап V-образных пружин по нижней ее плоскости, консолей одноплечих пружин по ее торцу и между собой.
Строгая координация параллелограммов амортизирующего устройства относительно его платформы и значительное сокращение подвижных соединений его конструктивных элементов позволяют обеспечить высокую точность плоскопараллельного положения навигационного прибора во всех направлениях орудия и тем самым увеличить точность его стрельбы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО НАВИГАЦИОННОГО ПРИБОРА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2010 |
|
RU2418258C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2003 |
|
RU2230280C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2005 |
|
RU2300072C1 |
| АМОРТИЗАТОР ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2010 |
|
RU2420703C1 |
| АМОРТИЗАТОР ГИРОСКОПИЧЕСКОГО УСТРОЙСТВА АРТИЛЛЕРИЙСКОГО ОРУДИЯ | 2004 |
|
RU2267076C1 |
| УСТРОЙСТВО ДЛЯ ГИРОСКОПИЧЕСКИХ ИЗМЕРЕНИЙ | 1996 |
|
RU2124183C1 |
| Силовая установка волнохода "Антар-5 | 1981 |
|
SU1131769A1 |
| СИСТЕМА ЗАРЯЖАНИЯ ДЛЯ ОРУДИЙНОЙ УСТАНОВКИ | 1999 |
|
RU2148229C1 |
| БОЕВОЕ ОТДЕЛЕНИЕ БРОНИРОВАННОЙ МАШИНЫ | 2003 |
|
RU2258889C2 |
| Способ определения дрейфа гиростабилизированной платформы, вызываемого крутильными колебаниями основания прибора | 2022 |
|
RU2787651C1 |
Амортизирующее устройство навигационного артиллерийского прибора относится к военной технике, а именно к буксируемым, самоходным и другим артиллерийским орудиям. Устройство содержит верхнюю и нижнюю платформы, две закрепленные на нижней платформе V-образные пластинчатые пружины с лапами, одноплечую пластинчатую пружину с консолью для упора в передний торец верхней платформы и поперечные цилиндрические пружины. Верхняя и нижняя платформы соединены двумя шарнирными параллелограммными механизмами. Верхние и нижние звенья параллелограммных механизмов образованы брусками, закрепленными по краям платформ посредством выступов, а наклонные звенья - двумя парами рычагов. Противоположные концы нижних осей задних рычагов соединены центрирующей трубкой, надетой на них с суммарным зазором относительно брусков, равным максимальному относительному смещению платформ. Технический результат заключается в обеспечении высокой точности измерения навигационного прибора и повышении точности стрельбы снабженного им артиллерийского орудия. 2 з.п. ф-лы, 2 ил.
1. Амортизирующее устройство навигационного артиллерийского прибора, содержащее соединенные двумя шарнирными параллелограммными механизмами верхнюю и нижнюю платформы, две закрепленные на нижней платформе V-образные пластинчатые пружины с лапами, одноплечую пластинчатую пружину с консолью для упора в передний торец верхней платформы и поперечные цилиндрические пружины, отличающееся тем, что верхние и нижние звенья параллелограммных механизмов образованы брусками, закрепленными по краям платформ посредством выступов, входящих в ответные параллельные пазы платформ, а наклонные звенья - двумя парами рычагов с запрессованными в них поперечными осями, выступающими с обеих сторон, при этом внешние концы осей расположены с возможностью поворота в отверстиях брусков, а противоположные концы нижних осей задних рычагов соединены центрирующей трубкой, надетой на них с суммарным зазором относительно брусков, равным максимальному относительному смещению платформ, а на противоположные концы верхних осей рычагов установлены поперечные цилиндрические пружины, поджатые распорными трубками.
2. Амортизирующее устройство по п.1, отличающееся тем, что на одноплечей пластинчатой пружине установлена дополнительная одноплечая пластинчатая пружина, закрепленная на нижней платформе.
3. Амортизирующее устройство по п.1, отличающееся тем, что рычаги выполнены с клинообразными выступами.
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 2003 |
|
RU2230280C1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1995 |
|
RU2108614C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2133432C1 |
| БЕСКОНТАКТНАЯ ИНДУКЦИОННАЯ МУФТА | 0 |
|
SU219680A1 |

