Изобретение относится к автоматизированным системам контроля потока автотранспортных средств на дорогах во время их движения с использованием систем распознавания образов и предназначено для выявления заявленных на поиск автомобилей и осуществления статистического учета проезжающих автомобилей.
Известны системы контроля за движением автотранспортных средств, оснащенные устройствами контроля, основанными на различных физических принципах: радиолокационном, фотоэлектрическом, индукционном, Доплера и др. (см., например, описание изобретения к авторскому свидетельству СССР N 492211, кл. G 08 G 1/01, 1973).
Известные устройства недостаточно эффективны для идентификации автотранспортных средств вследствие необходимости дополнительного оборудования автотранспортных средства соответствующими маркерами.
Известны, автоматизированные (аппаратно-программные) системы контроля автотранспортных средств, основанные на принципах распознавания образов, которые содержат видеокамеры, компьютеры идентификации автотранспортного средства, каждый из которых соединен с соответствующей видеокамерой, и сервер для управления и поиска автотранспортного средства в базе данных, связанный с указанными компьютерами посредством локальной вычислительной сети (см. , например, прилагаемую к заявочным материалам копию проспекта бельгийской фирмы: BATS (Belgian Advanced Technology Systems S. A.) Pare Industriel de Recherches du Sart-Tilman, Avenue des Noisetiers 8, B-4031 AngleurBelgique).
Признаки, являющиеся общими для известного и заявленного технических решений, заключаются в наличии видеокамер, компьютеров идентификации автотранспортных средств и сервера для управления и поиска автотранспортного средства в базе данных, связанного с компьютерами посредством локальной вычислительной сети.
Причина, препятствующая получению в известной системе требуемого технического результата, заключается в невозможности из-за бокового по отношению к дороге расположения видеокамер установить зоны идентификации автотранспортного средства в любом месте дорожного полотна, особенно при многополосном движении на любой скорости, отсутствии линий постоянной телекоммуникационной связи с централизованной (город, регион, страна, Интерпол) оперативной базой данных на разыскиваемый автотранспорт. Вследствие этого такие системы используются только при парковке автотранспортных средств или при их проезде через охраняемые объекты.
Прототипом является многозоновая система слежения за движением автотранспортных средств, содержащая множество стационарно установленных на дорогах зон контроля, в каждой из которых над дорогой установлены светильники, видеокамеры обнаружения и опознавания с наклоном вниз относительно горизонтальной плоскости и с ориентацией своих объективов навстречу движению автотранспорта и управляющее устройство для координации работы видеокамер, а также установленные на удаленном пункте (в центре) компьютеры идентификации автотранспортных средств, сервер с монитором для управления и поиска автотранспортных средств в базе данных, связанный посредством локальной вычислительной сети с компьютерами идентификации, с которыми при этом соединены видеокамеры опознавания (заявка PCT WO 93/19441, опубл. 30. 09. 93, кл. G 08 G 1/017).
Признаки, являющиеся общими для прототипа и заявленного изобретения, заключаются в наличии множества стационарно установленных на дорогах зон контроля, в которых над дорогой установлены светильники и видеокамеры с наклоном вниз относительно горизонтальной плоскости и с ориентацией своих объективов навстречу движения автотранспорта, а также в наличии одного или нескольких компьютеров идентификации автотранспортных средств, сервера с монитором для управления и поиска автотранспортных средств в базе данных, связанного посредством локальной вычислительной сети с одним или несколькими компьютерами идентификации.
Причина, препятствующая получению в прототипе требуемого технического результата, заключается в обеспечении реального масштаба времени только для контроля автотранспортных средств (определения нарушителя) и исключительно за счет специализированных систем телекоммуникационной связи между видеокамерами зон контроля, компьютерами полицейского управления (центра) и передвижными полицейскими нарядами (патрульными машинами). При этом реальный масштаб времени задержания нарушителя в известной системе (прототипе) не обеспечивается и требует для ее функционирования достаточного количества патрульных машин. Использование патрульных машин для задержания нарушителя делает систему дорогой и повышает при этом роль человеческого фактора в обеспечении задержания нарушителя, так как полицейский патрульной машины, получив по системе телекоммуникационной связи соответствующую информацию из центрального полицейского управления, вынужден в пределах довольно неопределенной зоны проводить поиск нарушителя визуально при постоянном движении патрульной машины в потоке движущегося автотранспорта. Это снижает надежность задержания. Является недостаточной также техническая надежность системы, так как система функционирует только в комплексе и ее работоспособность полностью зависит от работоспособности системы телекоммуникационной связи и компьютеров центрального полицейского управления. Выход их из строя приводит к полной неработоспособности всей системы. Кроме того, в прототипе осуществление основных функций невозможно в принципе без участия системы телекоммуникационной связи, которая при этом работает в режиме высоких нагрузок из-за необходимости постоянного поддержания в режиме реального времени связи со всеми видеокамерами, распределенными по региону, центральным компьютером и патрульными машинами. По этой причине система обнаружения и задержания разыскиваемых автомобилей в прототипе является сложной, дорогой и недостаточно надежной.
Задача, на решение которой направлено изобретение, заключается в создании многозоновой системы для контроля и задержания автотранспортных средств, каждая зона контроля которой вместе с подключенным к ней передвижным контрольным пунктом работает в автономном режиме при минимальной телекоммуникационной связи (или без нее) с компьютером центрального управления для условий российской дорожной системы, отличающейся значительной протяженностью дорог, наличием главных дорог и концентрированных транспортных узлов при нормативном ограничении допустимых остановок автотранспортных средств дорожно-патрульными службами в соответствии с приказом Министра внутренних дел РФ N 329 от 1 июня 1998 г. (зарегистрирован в Минюсте РФ 4 июня 1998 г.).
Технический результат, обусловливающий решение задачи, заключается в обеспечении в реальном масштабе времени на уровне каждого локального автоматизированного поста (отдельной зоны контроля с подключенным к ней передвижным контрольным пунктом) как непосредственно контроля всех проходящих через пост автотранспортных средств, так и принятия в автоматическом режиме оперативного решения о задержании того или иного автотранспортного средства и его действительного задержания в пределах ограниченного участка дороги. Это дает возможность экономично и эффективно "закрыть" основные магистрали и транспортные узлы региона совокупностью автономно работающих автоматизированных постов, что существенно минимизирует, а при использовании технических средств для остановки автотранспорта также и исключает человеческий фактор в обеспечении задержания нарушителя. Такое "закрытие" обеспечивается тем, что зоны контроля с соответствующими видеокамерами и светильниками стационарно устанавливают на заданной (большой) территории в количестве, необходимом и достаточном для решения не только отдельной задачи контроля и задержания (перехвата), но прежде всего всех потенциально возможных задач перехвата на этой заданной (большой) территории. При этом каждая отдельная задача контроля и задержания решается небольшой группой передвижных контрольных пунктов, которые по команде из центра оперативно выезжают к определенным (определяемым информацией о направлении движении нарушителя) зонам контроля, подключаются к ним и тем самым "закрывают" некоторую (меньшую) территорию предполагаемого нахождения искомого нарушителя. Таким образом, относительно большое число стационарно установленных и недорогих зон контроля функционирует с относительно малым числом передвижных и дорогих контрольных пунктов, временно подключаемых к тем или иным зонам контроля для решения отдельных задач контроля и задержания (перехвата). В этом случае достигается наиболее приемлемый для российских условий компромисс между широтой потенциально контролируемой территории и экономичностью решения каждой отдельной задачи перехвата. При этом на центральное управление не возлагается функция обеспечения реального масштаба времени контроля автотранспортных средств, а возлагается только функция оперативного информирования каждого поста о вновь включаемых в соответствующую базу данных разыскиваемых машин, что значительно снижает нагрузку на телекоммуникационные каналы связи и даже дает возможность работы без этих каналов, повышая надежность и снижая себестоимость системы.
Достигается технический результат за счет совокупности и специального пространственного расположения систем и устройств, входящих в систему.
Достигается технический результат тем, что многозоновая стационарно-передвижная система контроля за движением автотранспортных средств на дорогах, включающая множество стационарно установленных на дорогах зон контроля, в которых над дорогой установлены светильники и видеокамеры с наклоном вниз относительно горизонтальной плоскости и с ориентацией своих объективов навстречу движения автотранспорта, а также один или несколько компьютеров идентификации автотранспортных средств, сервер с монитором для управления и поиска транспортных средств в базе данных, связанный посредством локальной вычислительной сети с одним или несколькими компьютерами идентификации, согласно изобретению содержит передвижной контрольный пункт, коммутационные устройства и разделители полос и направлений движения, при этом упомянутые компьютеры идентификации автотранспортных средств, сервер с монитором и локальная вычислительная сеть установлены на передвижном контрольном пункте, коммутационные устройства установлены около дороги на заданном расстоянии от соответствующих зон контроля и выполнены с возможностью подключения к компьютерам идентификации передвижного контрольного пункта, разделители полос и направлений движения установлены в зонах контроля, каждая из которых представляет собой условный прямоугольник, охватывающий локальный участок дороги и разграниченный соответствующим разделителем полос и направлений движения, расположенным вдоль дороги с возможностью разграничения встречных потоков автотранспорта по длине их пути, равной или превышающей длину стороны условного прямоугольника зоны контроля, ориентированной вдоль дороги, а видеокамеры зоны контроля соединены с соответствующим коммутационным устройством и установлены как минимум по одной видеокамере в областях противоположных по диагонали углов условного прямоугольника зоны контроля.
Достигается технический результат также тем, что светильники расположены с возможностью создания вертикальных концентрированных потоков света с неравномерным распределением его интенсивности вдоль контролируемой линии дороги в пределах зоны контроля, так что максимальная интенсивность света приходится на области обзоров видеокамер.
Достигается технический результат также тем, что светильники выполнены с возможностью излучения света инфракрасного спектра.
Достигается технический результат также тем, что система снабжена установленными на контрольном пункте системой видеонаблюдения, системой телефонной связи, а также системой телекоммуникационной связи, которая, с одной стороны, посредством мультиплексора связана с системой видеонаблюдения, с системой телефонной связи и с вышеупомянутой локальной вычислительной сетью, а с другой стороны, связана с централизованной базой данных на разыскиваемый автотранспорт и устройством для остановки автотранспорта.
Соответствие заявленного технического решения критерию "новизна" обусловлено наличием новых относительно прототипа признаков, перечисленных в формуле изобретения.
Соответствие заявленного технического решения критерию "изобретательский уровень " обусловлено наличием новых относительно уровня техники признаков зоны контроля, заключающихся в специальном пространственном расположении зон контроля относительно коммутационных устройств, а также видеокамер, светильников и разделителя полос и направлений движения друг относительно друга внутри каждой зоны контроля, что в сочетании с известными в технике электронными и программными средствами обеспечивает достижение нового технического результата, которого не имеют известные системы того же назначения.
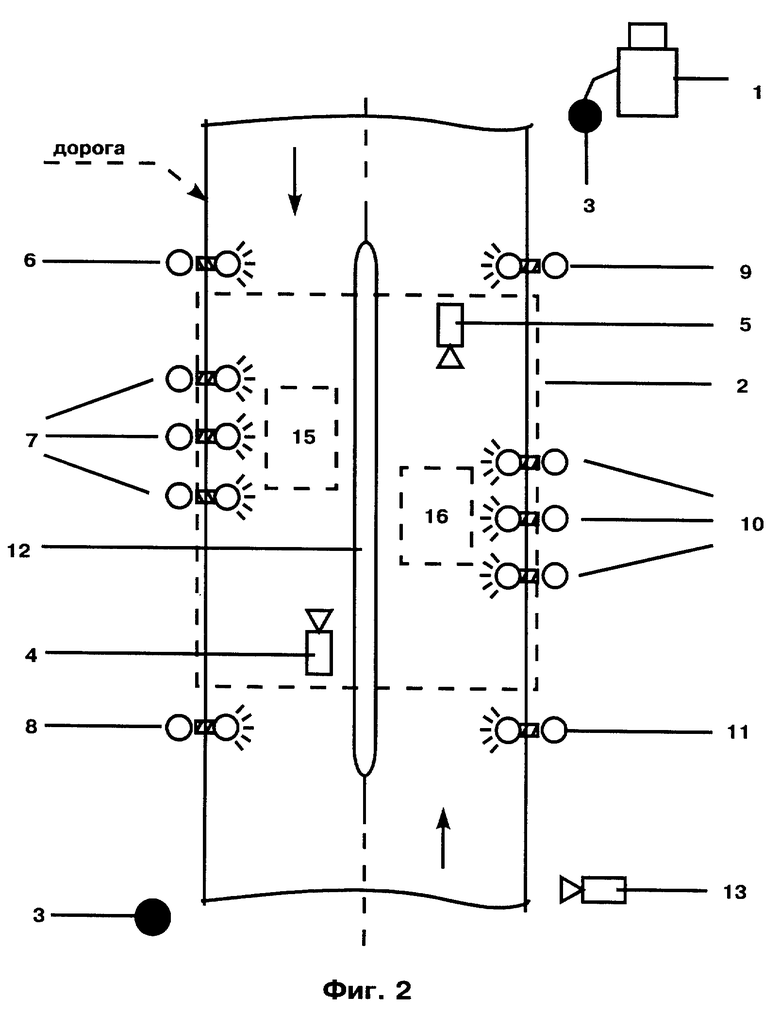
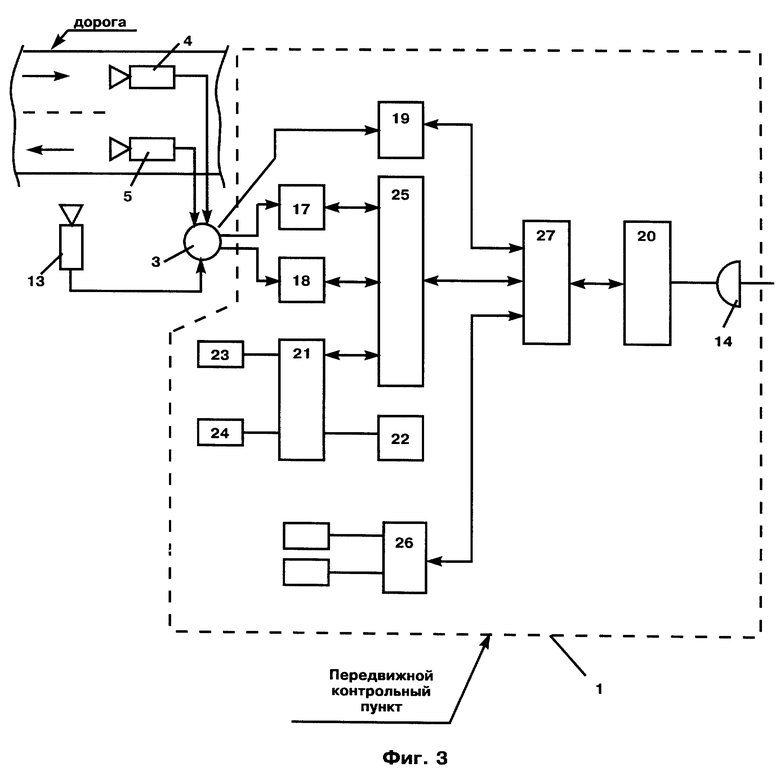
На фиг. 1 показано возможное расположение на дорогах множества зон контроля с соответствующими коммутационными устройствами; на фиг. 2 - пространственное расположение светильников, видеокамер и разделителей полос и направлений движения внутри каждой зоны контроля на фиг. 3 - функциональная схема аппаратной части аппаратно-программного комплекса передвижного контрольного пункта.
Многозоновая стационарно-передвижная система контроля за движением автотранспортных средств на дорогах включает: передвижной контрольный пункт 1, снабженный помещением для наряда со средствами связи и задержания; множество зон контроля 2, каждая из которых представляет собой условный прямоугольник (показан пунктирной линией на фиг. 1 и 2), охватывающий определенный локальный участок дороги, и как минимум одно коммутационное устройство 3, установленное около дороги на заданном расстоянии от указанного прямоугольника (примерно 200 или более метров); видеокамеры 4 и 5, которые установлены в каждой зоне контроля 2 в противоположных по диагонали углах ее условного прямоугольника над дорогой на высоте 4,8 или более метров и соединены кабелями с коммутационным устройством 3; светильники 6 - 11, которые установлены в зоне контроля 2 над дорогой и вдоль дороги на высоте 4,8 или более метров; разделитель полос и направлений движения, который выполнен, на пример, в виде разграничительного ограждения 12, установленного в каждой зоне контроля 2 вдоль дороги по ее оси для разграничения встречных направлений движения транспорта, а также транспорта, движущегося в одном направлении; видеокамеру 13 системы видеонаблюдения 19 (фиг. 3) за постом и дорожной обстановкой.
Кроме того, видеокамеры 4 и 5 установлены над дорогой наклонно с ориентацией своих объективов вниз навстречу движению транспорта (наклон на фигурах не показан). Минимальная высота установки (4,8 метра) определяется максимальным вертикальным габаритом транспортных средств, а максимальная (примерно 6 метров) - возможностью считывания номерного знака автомобиля, находящегося в течение короткого времени в зоне обзора 15 (или 16) соответствующей видеокамеры. Дело в том, что данный номерной знак имеет не только всегда вертикальную ориентацию, но в некоторых автомобилях расположен под бампером, что требует наклонного расположения видеокамер 4 и 5 при небольшом угле их наклона относительно горизонтальной плоскости.
Светильники 6 - 11 предназначены для обеспечения достаточной для работы видеокамер 4 и 5 освещенности соответствующих зон 15 и 16 их обзора в любое время суток. При этом, чтобы не мешать водителю автомобиля, светильники (видимого спектра излучения) расположены над дорогой с возможностью обеспечения вертикальных потоков света. Минимальная высота установки светильников (4,8 метра) также обусловлена максимальными вертикальными габаритами транспортных средств. Кроме того, светильники расположены вдоль дороги с возможностью создания неравномерного вдоль дороги потока света. Причем максимальный поток света создается светильниками 7 и 10 в соответствующих зонах 15 и 16 обзора видеокамер 4 и 5, а минимальный - светильниками 6, 8, 9, 11 за пределами этих зон в областях поперечных (относительно дороги) сторон условных прямоугольников 3. Это необходимо для устранения резких переходов в освещенности дороги в темное время суток, что существенно для безопасности движения. Однако выполнение этих условий расположения светильников не является обязательным в случае применения светильников с инфракрасным излучением.
Каждая зона контроля 2 имеет разделитель полос и направлений движения, выполненный, например, в виде разграничительного ограждения 12. Это ограждение предназначено для разделения двух встречных потоков транспорта с той целью, чтобы воспрепятствовать возможному объезду автомобилем (желающим избежать контроля) соответствующей зоны обзора 15 или 16 видеокамеры 4 или 5 путем выхода его (автомобиля) на полосу встречного движения. Цель достигается тем, что длина ограждения 12 равна или больше продольной (относительно дороги) стороны условного прямоугольника 2. Однако наличие ограждения не является обязательным в случае нанесения линий разметки проезжей части.
Система также содержит аппаратно-праграммный комплекс (фиг. 3), установленный на передвижном контрольном пункте 1 (на фиг. 3 данный пункт очерчен штриховой линией). Комплекс включает компьютеры 17 и 18 идентификации транспортного средства, с которыми посредством коммутационных устройств 3 соединяются на определенное время видеокамеры 4 и 5; сервер 21 с монитором 22, принтером 23 и манипулятором 24 для управления и поиска транспортных средств в базе данных; локальную вычислительную сеть 25, связывающую между собой упомянутые компьютеры идентификации и сервер; систему видеонаблюдения 19, соединяемую с видеокамерой 13 через коммутационное устройство 3, причем видеокамера 13 выполнена поворотной и предназначена для визуального наблюдения за постом и дорогой; систему 26 телефонной связи с соответствующими телефонными аппаратами, которая обеспечивает речевую связь контрольного пункта с дежурной частью или с централизованной базой данных на разыскиваемый автотранспорт; систему 20 телекоммуникационной связи, которая, с одной стороны, посредством антенны 14 связана с централизованной базой данных на разыскиваемый автотранспорт и устройством для остановки автотранспорта, а с другой стороны, через мультиплексор 27 (или его программно-функциональный эквивалент) связана с локальной вычислительной сетью 25, системой видеонаблюдения 19 и системой телефонной связи 26.
Работа многозоновой стационарно-передвижной системы контроля за движением автотранспортных средств заключается в следующем.
Первоначально из с централизованной базы данных на разыскиваемый автотранспорт (не показана) по каналу телекоммуникационной связи 14 и 20 (фиг. 3) через мультиплексор 27 и локальную вычислительную сеть 25 осуществляется загрузка в сервер 21 базы данных разыскиваемых транспортных средств. После этого в соответствии с заданием передвижной контрольный пункт 1 выезжает в направлении определенной зоны контроля 2 на дороге и останавливается около соответствующего коммутационного устройства 3. При этом аппаратно- программный комплекс, расположенный на контрольном пункте 1, подключают при помощи гибкого кабеля и соответствующего разъема к коммутационному устройству 3, вследствие чего видеокамеры 4 и 5 оказываются соединенными с компьютерами идентификации 17 и 18, а видеокамера 13-е системой 19. Затем при необходимости включают освещение зоны контроля 2 и осуществляют контроль за движением автотранспортных средств без их остановки. При этом видеокамеры 4 и 5 совместно с компьютерами 17 и 18, снабженными соответствующим программным обеспечением, осуществляют идентификацию (определение номера, цвета и типа) транспортного средства, проезжающего через соответствующую зону наблюдения 15 и 16 указанных видеокамер (фиг. 2). Данная идентификация осуществляется путем захвата изображения объекта (транспортного средства), сопровождения объекта в зоне видимости 15 или 16 видеокамер 4 или 5, а также опознание объекта, включающее опознание его государственного номера, цвета и типа. Производится также измерение и контроль скорости движения автотранспортного средства через зону контроля путем фиксации изменения его изображения при разных его положениях относительно соответствующей видеокамеры за определенные промежутки времени. Результаты опознавания передаются в сервер 21, где производится сравнение этих результатов с имеющейся базой данных подлежащих задержанию автотранспортных средств. В случае совпадения соответствующему наряду, расположенному на дороге, выдается команда (сигнал) на задержание определенного транспортного средства. Может также выдаваться сигнал соответствующему исполнительному устройству для автоматической остановки автотранспортного средства. Сервер 21 выполняет также функцию накапливания информации о всех проследовавших через пост автотранспортных средствах за определенный интервал времени. Работа сервера предполагает наличие оператора, который осуществляет визуальный контроль за работой всей системы, выполняет управляющую функцию и в случае необходимости при помощи принтера 23 воспроизводит на бумажном носителе изображение интересующего автотранспортного средства. Корректировка базы данных, находящейся в сервере 21, может осуществляться как вручную, так и автоматически по каналу телекоммуникационной связи из с централизованной базы данных на разыскиваемый автотранспорт.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАЦИОНАРНЫЙ ПОСТ КОНТРОЛЯ ЗА ДВИЖЕНИЕМ АВТОТРАНСПОРТНЫХ СРЕДСТВ (ЕГО ВАРИАНТЫ) | 1998 |
|
RU2137202C1 |
| СИСТЕМА КОНТРОЛЯ ЗА ДВИЖЕНИЕМ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2374692C2 |
| СИСТЕМА ЭЛЕКТРОННОЙ ИДЕНТИФИКАЦИИ АВТОТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2001 |
|
RU2185663C1 |
| Способ нахождения угнанного транспортного средства | 2017 |
|
RU2668770C1 |
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| СИСТЕМА КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ С СИСТЕМОЙ ЗАЩИТЫ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА | 2004 |
|
RU2265889C1 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ОБСТАНОВКИ В ЗРИТЕЛЬНЫХ ЗАЛАХ | 2005 |
|
RU2296434C2 |
| СИСТЕМА ОПОЗНАВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2500036C1 |
| СИСТЕМА ВИЗУАЛЬНОГО ВОСПРОИЗВЕДЕНИЯ РЕКЛАМНОЙ ИНФОРМАЦИИ | 1997 |
|
RU2129309C1 |
Изобретение относится к области контроля потока автотранспортных средств. Технический результат изобретения заключается в снижении себестоимости и упрощении промышленного использования контроля за движением автотранспортных средств в масштабе города, области и государства в условиях нормативного ограничения допустимых причин остановки автотранспортных средств дорожно-патрульными службами. Система включает передвижной контрольный пункт, множество стационарных зон контроля, каждая из которых представляет собой условный прямоугольник, охватывающий определенный локальный участок дороги, коммутационные устройства, установленные около дороги на заданном расстоянии от указанного прямоугольника. В каждой зоне контроля установлены видеокамеры, светильники, разделитель полос и направлений движения. Система также содержит аппаратно-программный комплекс, установленный на передвижном контрольном пункте. Комплекс включает компьютеры идентификации транспортного средства, с которыми посредством коммутационных устройств соединяются на определенное время видеокамеры, сервер для управления и поиска транспортных средств в базе данных, локальную вычислительную сеть, систему видеонаблюдения, соединяемую с видеокамерой через коммутационное устройство, систему телефонной связи, систему телекоммуникационной связи. 3 з.п.ф-лы, 3 ил.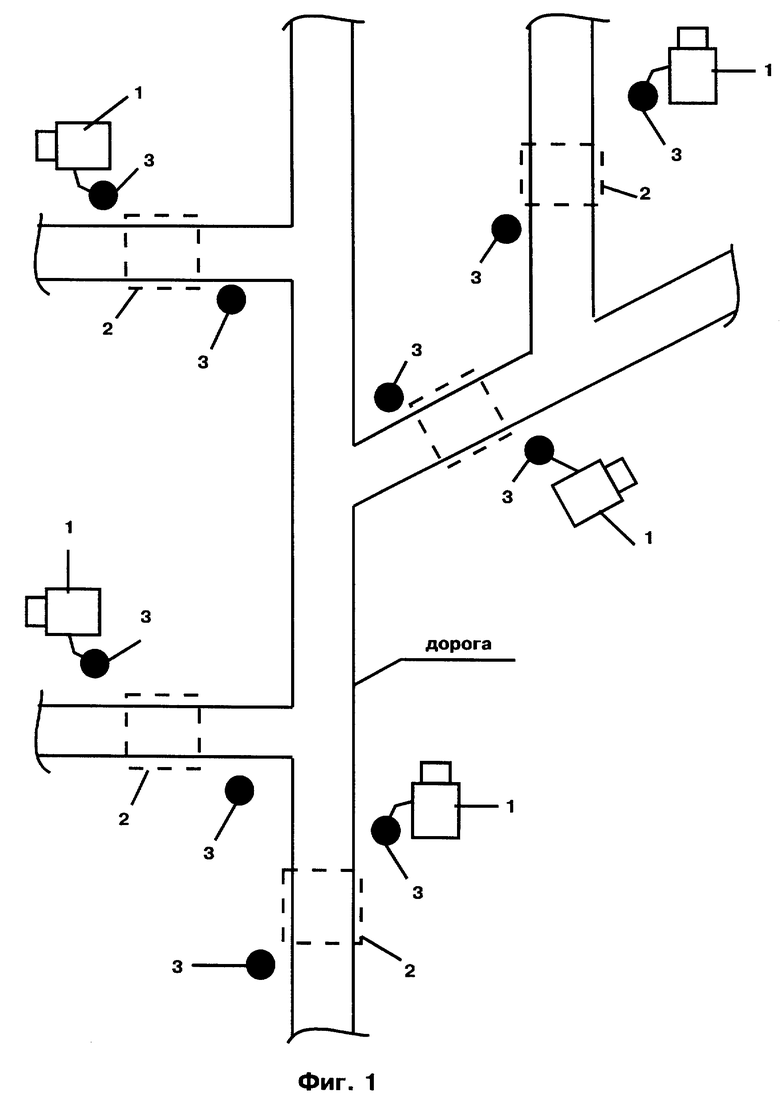
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| US 5696503 A, 09.12.97 | |||
| ТРАНСПОРТНАЯ ТАРА ДЛЯ БУТЫЛОК | 2001 |
|
RU2273596C2 |
| US 5568406 A, 22.10.96 | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И ВЫЯВЛЕНИЯ ЗАЯВЛЕННЫХ НА ПОИСК АВТОМОБИЛЕЙ ПРИ ПРОХОЖДЕНИИ КОНТРОЛЬНЫХ ПУНКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2084961C1 |
| Устройство для определения номера и направления движения объекта | 1988 |
|
SU1541652A1 |
| Способ измерения параметров транспортных потоков | 1973 |
|
SU492211A1 |

