Изобретение относится к области радиоэлектронных технологий, а именно к способу и устройству ориентирования изделий различной формы, например радиоэлектронных компонентов при их транспортировании, и может быть использовано в малогабаритных автоматах поверхностного монтажа.
Известен способ ориентирования изделий различной формы при их транспортировании (см. заявку №2001121959 от 07.08.2001 г.), согласно которому формируют строчные последовательности изделий в плоскости вращения с последующим переносом их на общий носитель элементом переноса, при этом вводят дополнительные элементы переноса изделий, образуя совокупность элементов переноса изделий, которые располагают либо в радиальных направлениях, либо в смещенных радиальных направлениях, причем ось вращения совокупности элементов переноса изделий располагают либо компланарно оси вращения одной или двум плоскостям формирования строчной последовательности изделий, либо соосно, над которой или которыми располагают совокупность элементов переноса изделий, при этом общий носитель располагают с возможностью непрерывного или дискретного смещения под сформированной совокупностью элементов переноса изделий и на него осуществляют перенос и фиксацию строчных последовательностей изделий с соответствующих элементов переноса изделий. При этом элемент переноса строчной последовательности изделий со стороны приема строчной последовательности выполняют со смачиваемой поверхностью (прототип).
Известный прототип имеет технологические возможности, которые заключаются в возможности использовать простейший элемент (смачиваемую поверхность) для приема и последующего переноса изделия строчной последовательности на поверхность общего носителя, что позволяет использовать его в технологии поверхностного монтажа, при этом надежность приема изделия различной формы существенно зависит от идентичности перемещения каждого элемента переноса в своей совокупности.
Технологическим и техническим результатом предложенного изобретения является повышение надежности известного способа, в частности замкнутый цикл пошагового электромагнитного вращения совокупности элементов переноса вокруг общей оси или индивидуальных осей вращения элементов переноса осуществляют путем совместного смещения совокупности элементов переноса и механизма электромагнитного пошагового вращения в линейном интервале расположения зон приема и общего носителя, при этом разворот зубчатой поверхности двух механизмов электромагнитного пошагового вращения выполняют в противоположном направлении.
Указанный технологический и технический результат достигается следующим способом и устройством.
Способ ориентирования изделий различной формы при их транспортировании, согласно которому в зоне приема располагают изделия строчных последовательностей для последующего приема и переноса их на общий носитель смоченной поверхностью последовательной совокупностью элементов переноса, которую выполняют с возможностью вращения, при этом каждый из элементов переноса выполняют с возможностью возвратно-поступательного смещения для приема изделий и установки или фиксации их в соответствующих позиционных положениях на общем носителе, при этом замкнутый цикл пошагового электромагнитного вращения совокупности элементов переноса вокруг общей оси или индивидуальных осей вращения элементов переноса осуществляют путем совместного смещения совокупности элементов переноса и механизма электромагнитного пошагового вращения в линейном интервале расположения зон приема и общего носителя, при этом разворот зубчатой поверхности двух механизмов электромагнитного пошагового вращения выполняют в противоположном направлении.
Устройство ориентирования изделий различной формы при их транспортировании, содержащее узел формирования строчных последовательностей и узел приема и переноса изделий строчной последовательности в виде совокупности элементов переноса со смачиваемой жидкостью поверхностью с возможностью совместного вращения и индивидуального возвратно-поступательного смещения, которые расположены в общем корпусе, узел смачивания элементов переноса, общий носитель, при этом введен первый и второй механизмы электромагнитного пошагового вращения, которые расположены с одной стороны между двумя парами направляющих общего корпуса, с другой стороны на двух смещенных осях продольного смещения совокупности элементов переноса и связаны между собой пружиной сжатия, при этом толкатели механизма электромагнитного пошагового вращения первой и второй зубчатой поверхности корпуса вращения совокупности элементов переноса ориентированы навстречу друг другу с возможностью разворота зубчатой поверхности навстречу друг другу, а электромагнит каждого механизма пошагового вращения расположен либо в общем корпусе, либо в корпусе устройства и функционально связан с соответствующим механизмом электромагнитного пошагового вращения.
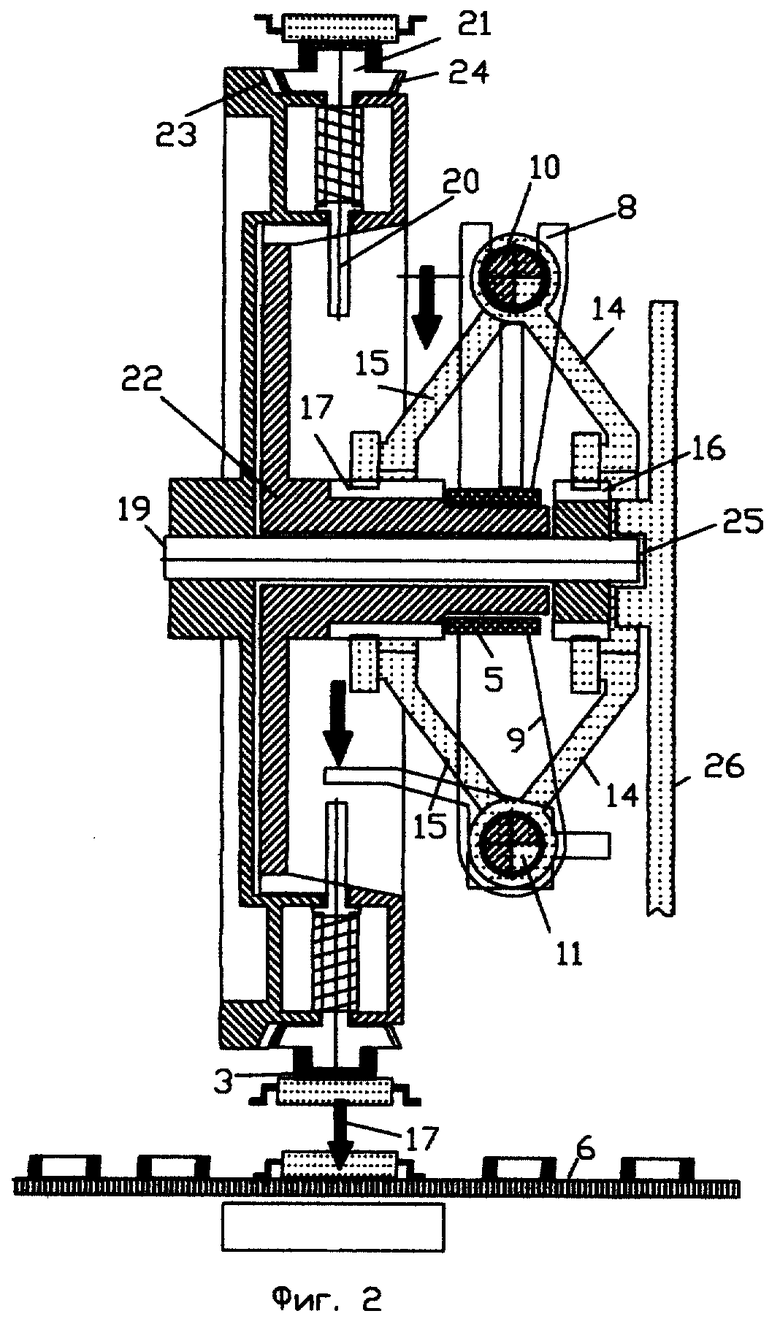
На фиг.1 и 2 изображено устройство, которое реализуют предложенный способ.
Устройство содержит узел формирования строчных последовательностей 1 и узел приема и переноса изделий строчной последовательности в виде совокупности элементов переноса 2 со смачиваемой жидкостью поверхностью 3 с возможностью вращения 4, которые расположены в общем корпусе 5, узел смачивания элементов переноса, общий носитель 6, при этом введен первый и второй механизмы электромагнитного пошагового вращения 7.1 и 7.2, которые расположены, с одной стороны между двумя парами направляющих 8 и 9 общего корпуса 5, который шарнирно расположен на фигурном диске (корпуса вращения совокупности элементов переноса 2) 22 для совместного с ним перемещения, с другой стороны на двух смещенных осях 10 и 11 продольного смещения совокупности элементов переноса 2 и связаны между собой пружиной сжатия 12 и 13, при этом толкатели 14 и 15 механизма электромагнитного пошагового вращения первой и второй зубчатой поверхности 16 и 17 корпуса вращения совокупности элементов переноса 2 ориентированы навстречу друг другу с возможностью разворота зубчатой поверхности 16 и 17 навстречу друг другу, а электромагнит каждого механизма пошагового вращения расположен либо в общем корпусе 5, либо в корпусе устройства 18 и функционально связан с соответствующим механизмом электромагнитного пошагового вращения 14 и 15.
Работа устройства заключается в следующем.
В зоне приема или узле формирования строчных последовательностей 1 располагают кассеты с изделиями с возможностью вращения их для последующего приема 16 и переноса 17 их на общий носитель 6 смоченной поверхностью 3 последовательной совокупностью элементов переноса 2, которую выполняют с возможностью вращения 4, при этом каждый из элементов переноса 2 выполняют с возможностью возвратно-поступательного смещения посредством электромагнита для приема 16 изделий 18 и установки 17 или фиксации их в соответствующих позиционных положениях на общем носителе 6, при этом замкнутый цикл пошагового электромагнитного вращения совокупности элементов переноса 2 вокруг общей оси 19 или индивидуальных осей 20 вращения элементов переноса 21 осуществляют путем совместного смещения совокупности элементов переноса 2 и механизма электромагнитного пошагового вращения 14 и 15 в линейном интервале расположения зон приема 1 и общего носителя 6, при этом разворот зубчатой поверхности 16 и 17 двух механизмов электромагнитного пошагового вращения выполняют в противоположном направлении. Для разворота элементов переноса 21 вокруг индивидуальных их осей 20 осуществляется посредством общей конической шестеренки 23 (фиг.2), которая функционально связана с индивидуальными коническими шестеренками 24, которые расположены на индивидуальной оси 20, при этом вращение общей конической шестеренки 23 обеспечивается зубчатой поверхностью 16, которая также как и общая коническая шестеренка 23 жестко связана с осью 19, которая одним концом, со стороны шестеренки 16, расположена в продольном пазу 26 корпуса устройства 26, в котором зафиксированы оси 10 и 11 продольного смещения совокупности элементов переноса 2 (фиг.2).
Использование изобретения позволяет повысить надежность работы малогабаритных автоматов поверхностного монтажа.
Изобретение относится к области радиоэлектронных технологий и может быть использовано при построении принципиально новых малогабаритных автоматов поверхностного монтажа. Способ ориентирования изделий различной формы при их транспортировании заключается в том, что в зоне приема располагают изделия строчных последовательностей для последующего приема и переноса их на общий носитель смоченной поверхностью последовательной совокупностью элементов переноса, которую выполняют с возможностью вращения, при этом каждый из элементов переноса выполняют с возможностью возвратно-поступательного смещения для приема изделий и установки или фиксации их в соответствующих позиционных положениях на общем носителе, при этом замкнутый цикл пошагового электромагнитного вращения совокупности элементов переноса вокруг общей оси или индивидуальных осей вращения элементов переноса осуществляют путем совместного смещения совокупности элементов переноса и механизма электромагнитного пошагового вращения в линейном интервале расположения зон приема и общего носителя, при этом разворот зубчатой поверхности двух механизмов электромагнитного пошагового вращения выполняют в противоположном направлении. Технический результат - повышение надежности работы малогабаритных автоматов поверхностного монтажа с одновременным повышением скоростных параметров. 2 н.п. ф-лы, 2 ил.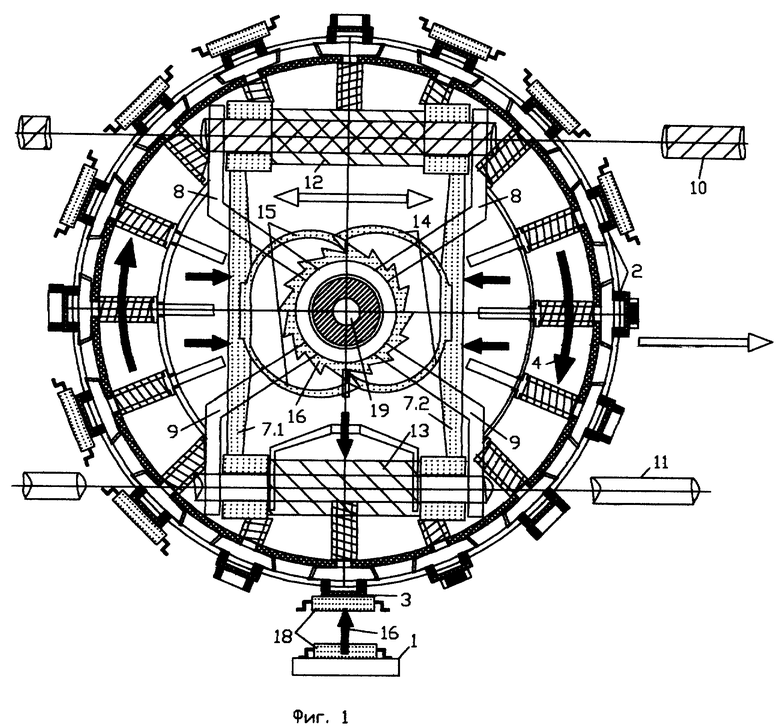
| СПОСОБ ОРИЕНТИРОВАНИЯ ИЗДЕЛИЙ РАЗЛИЧНОЙ ФОРМЫ ПРИ ИХ ТРАНСПОРТИРОВАНИИ ИМ.Л.П.ПЕТРЕНКО-ВЕРСИЯ VI | 2001 |
|
RU2203209C1 |

