Изобретение относится к области радиоэлектронных технологий, а именно к способу и устройству ориентирования изделий различной формы, например радиоэлектронных компонентов, при их транспортировании, и может быть использовано в малогабаритных автоматах поверхностного монтажа.
Известен способ ориентирования изделий различной формы при их транспортировании (см. заявку №2001121959 от 07.08.2001 г.), согласно которому формируют строчные последовательности изделий в плоскости вращения с последующим переносом их на общий носитель элементом переноса, при этом вводят дополнительные элементы переноса изделий, образуя совокупность элементов переноса изделий, которые располагают либо в радиальных направлениях, либо в смещенных радиальных направлениях, причем ось вращения совокупности элементов переноса изделий располагают либо компланарно оси вращения одной или двум плоскостям формирования строчной последовательности изделий, либо соосно, над которой или которыми располагают совокупность элементов переноса изделий, при этом общий носитель располагают с возможностью непрерывного или дискретного смещения под сформированной совокупностью элементов переноса изделий и на него осуществляют перенос и фиксацию строчных последовательностей изделий с соответствующих элементов переноса изделий. При этом элемент переноса строчной последовательности изделий со стороны приема строчной последовательности выполняют со смачиваемой поверхностью (прототип).
Известный прототип имеет технологические возможности, которые заключаются в возможности использовать простейший элемент (смачиваемую поверхность) для приема и последующего переноса изделия строчной последовательности на поверхность общего носителя, что позволяет использовать его в технологии поверхностного монтажа, при этом надежность приема изделия различной формы существенно зависит от идентичности перемещения каждого элемента переноса в своей совокупности.
Технологическим и техническим результатом предложенного изобретения является повышение надежности известного способа, в частности, возвратно-поступательное смещение элементов переноса со смачиваемой поверхностью осуществляют в индивидуальных радиальных осях вращения, которые располагают ортогонально общей оси вращения совокупности элементов переноса с возможностью одновременного разворота всех элементов переноса вокруг радиальных осей вращения с последующим возвращением в исходное положение, при этом дискретное вращение совокупности элементов переноса осуществляют в вертикальной плоскости вокруг общей оси вращения.
Указанный технологический и технический результат достигается следующим способом и устройством.
Способ ориентирования изделий различной формы при их транспортировании, согласно которому в узле формирования строчных последовательностей располагают изделия строчных последовательностей для последующего переноса их на общий носитель смоченной поверхностью последовательной совокупностью элементов переноса, которую выполняют с возможностью вращения вокруг общей оси вращения, при этом каждый из элементов переноса выполняют с возможностью возвратно-поступательного смещения для приема изделий и установки или фиксации их в соответствующих позиционных положениях на общем носителе, при этом возвратно-поступательное смещение элементов переноса со смоченной поверхностью осуществляют в радиально ориентированных цилиндрических направляющих, которые располагают ортогонально оси вращения совокупности элементов переноса с возможностью одновременного разворота всех элементов переноса вокруг радиальных осей вращения с последующим возвращением в исходное положение, при этом дискретное вращение совокупности элементов переноса осуществляют в вертикальной плоскости вокруг общей оси вращения.
Устройство ориентирования изделий различной формы при их транспортировании, содержащее узел формирования строчных последовательностей и узел приема и переноса изделий строчной последовательности в виде совокупности элементов переноса со смоченной жидкостью поверхностью с возможностью вращения, узел смачивания элементов переноса, общий носитель, при этом каждый из элементов переноса выполнен в виде цилиндрической втулки, одна сторона которой представляет собой смоченную жидкостью поверхность, а другая - коническую зубчатую поверхность, каждый элемент переноса расположен на соответствующей радиально ориентированной направляющей корпуса, имеющего возможность вращения, при этом каждый элемент переноса со стороны конической зубчатой поверхности закреплен с началом цилиндрической пружины, конец которой закреплен на соответствующей цилиндрической направляющей корпуса, соосно которому расположена общая коническая зубчатая шестеренка с возможностью вращения, которая функционально связана с коническими зубчатыми поверхностями элементов переноса для возможности их одновременного разворота вокруг радиальных осей вращения с последующим их возвращением в исходное положение, а возвратно-поступательное смещение элементов переноса для приема изделий и установки или фиксации их в соответствующих позиционных положениях на общем носителе осуществляются посредством электромагнита и скрепленных с элементами переноса цилиндрических пружин.
На фиг.1-3 изображено устройство, которое реализует предложенный способ.
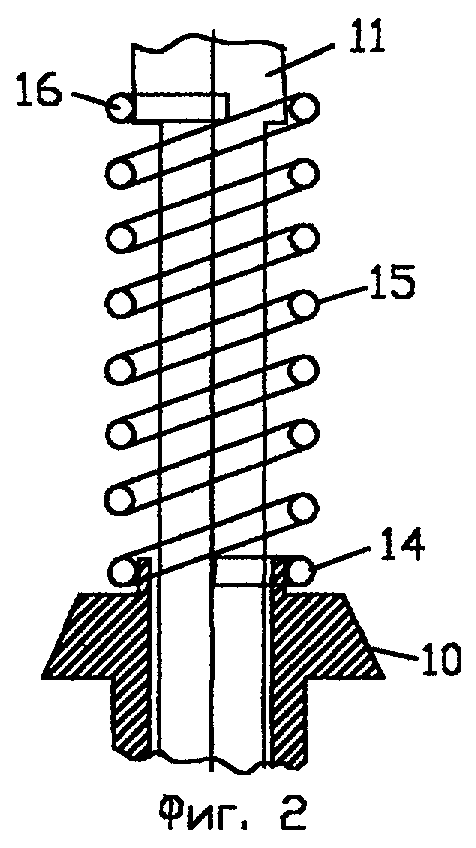
Устройство содержит узел формирования строчных последовательностей 1 и узел приема и переноса 2 изделий строчной последовательности в виде совокупности элементов переноса 3 со смачиваемой жидкостью поверхностью 4 с возможностью вращения 5, которые расположены в общем корпусе, в котором также расположен узел смачивания элементов переноса 3 (узел смачивания конструктивно представляет собой емкость с водой и ролик со свободным вращением, внешняя поверхность которого выполнена из смачиваемого материала, например кожи, и расположена так, что имеет постоянный контакт с водой и возможный контакт со смачиваемыми поверхностями 4 элементов переноса 3, контакт для смачивания смачиваемых поверхностей 4 осуществляется только в том случае, когда совокупность элементов переноса 3 смещают в узел смачивания и в контакте с внешней поверхностью ролика после одного или нескольких оборотов совокупности элементов переноса вода с внешней поверхности ролика переходит на смачиваемую поверхность 4 совокупности элементов переноса 3), общий носитель 8, при этом каждый из элементов переноса 3 выполнен в виде цилиндрической втулки 9, с одной стороны которой зафиксирована смачиваемая поверхность 4, а с другой выполнена коническая зубчатая поверхность 10, при этом цилиндрическая втулка 9 элементов переноса расположена на соответствующих радиально ориентированных цилиндрических направляющих 11 корпуса 12, который выполнен с возможностью вращения на общем корпусе 13, при этом цилиндрическая втулка 9 каждого элемента переноса со стороны конической зубчатой поверхности 10 фиг.2 закреплена с началом 14 цилиндрической пружины 15, конец 16 которой закреплен на соответствующей цилиндрической направляющей 11 корпуса 12, соосно которому расположена общая коническая зубчатая шестеренка 17 с возможностью вращения, которая функционально связана с коническими зубчатыми поверхностями 10 цилиндрических втулок 9 элементов переноса.
Работа устройства заключается в следующем.
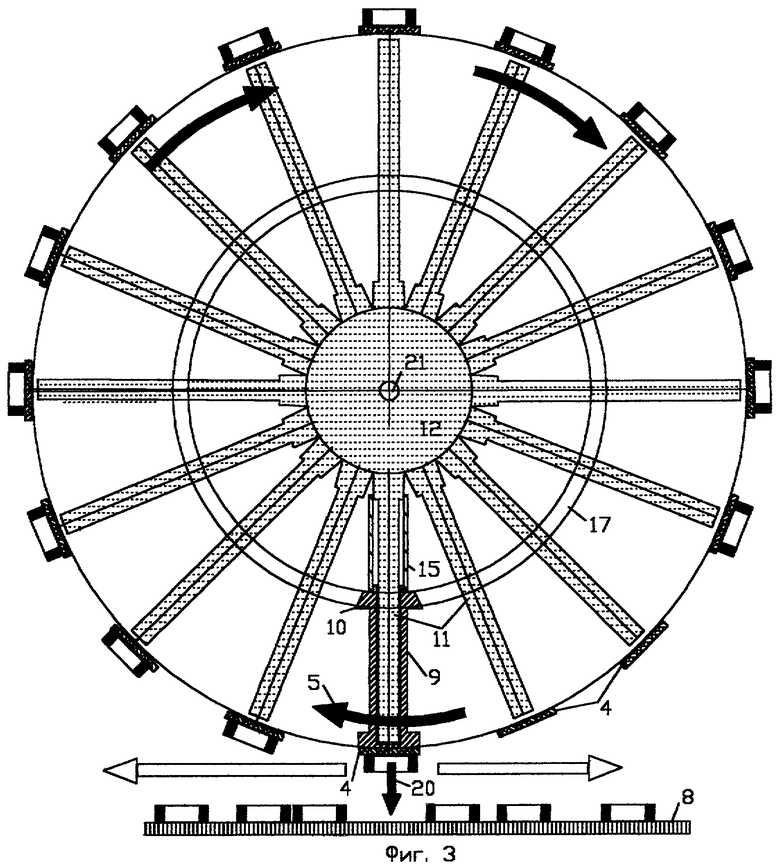
В узле формирования строчных последовательностей 1 располагают изделия 18 строчных последовательностей для приема 19 на элемент переноса 3 для последующего переноса 20 их на общий носитель 8 смоченной поверхностью 4 последовательной совокупностью элементов переноса, которую выполняют с возможностью вращения 5 вокруг общей оси вращения 21, при этом каждый из элементов переноса 3 выполняют с возможностью возвратно-поступательного смещения 22 посредством электромагнита 23 для приема 19 изделий 18 и установки 20 или фиксации их в соответствующих позиционных положениях на общем носителе 8, при этом возвратно-поступательное смещение элементов переноса со смачиваемой поверхностью 4 осуществляют в индивидуальных радиальных осях вращения или радиально ориентированных цилиндрических направляющих 11 корпуса 12, которые располагают ортогонально общей оси вращения 21 совокупности элементов переноса с возможностью одновременного разворота всех элементов переноса вокруг радиальных осей вращения с последующим возвращением в исходное положение посредством конической зубчатой шестеренки, при этом дискретное вращение совокупности элементов переноса осуществляют в вертикальной плоскости фиг.3 вокруг общей оси вращения 21.
Другими словами, при вертикальном смещении цилиндрической втулки 9 происходит растягивание цилиндрической пружины 15, а при развороте элемента переноса 3 для принятия 19 изделия 18 с иной ориентацией осуществляют скручивание или раскручивание цилиндрической пружины 15 посредством конической зубчатой шестеренки 17. Следует отметить, что коническая зубчатая шестеренка 17 с одной стороны функционально связана с коническими поверхностями 10 каждого элемента переноса 3, а с другой стороны функционально связана с шаговым двигателем для одновременного разворота всех элементов переноса 3 при приеме 19 или при установке 20 изделий. Учитывая то, что цилиндрических пружин 15 достаточно большое количество в соответствии с количеством элементов переноса 3, то на шаговый двигатель подают управляющий сигнал только на разворот совокупностей элементов переноса 3, а возврат в исходное положение обеспечивает совокупность упругих сил цилиндрических пружин 15. После приема изделия 18 цилиндрическая пружина 15 возвращается в исходное положение.
Использование изобретения позволяет повысить надежность работы малогабаритных автоматов поверхностного монтажа.
Изобретение относится к области радиоэлектроники и может быть использовано при монтаже радиоэлектронных компонентов. Изделия переносят из узла формирования строчных последовательностей на общий носитель смоченной поверхностью совокупностью элементов переноса. Возвратно-поступательное смещение элементов переноса в виде втулок осуществляют посредством электромагнита и пружин в радиально ориентированных цилиндрических направляющих корпуса, имеющего возможность вращения. Указанные направляющие располагают ортогонально оси вращения совокупности элементов переноса с возможностью одновременного разворота всех элементов переноса вокруг радиальных осей вращения с последующим возвращением в исходное положение. Дискретное вращение совокупности элементов переноса осуществляют в вертикальной плоскости вокруг общей оси вращения. Соосно корпусу расположена общая коническая зубчатая шестеренка с возможностью вращения, которая функционально связана с коническими зубчатыми поверхностями элементов переноса для возможности их одновременного разворота вокруг радиальных осей вращения с последующим их возвращением в исходное положение. Технический результат - повышение надежности. 2 н.п. ф-лы, 3 ил.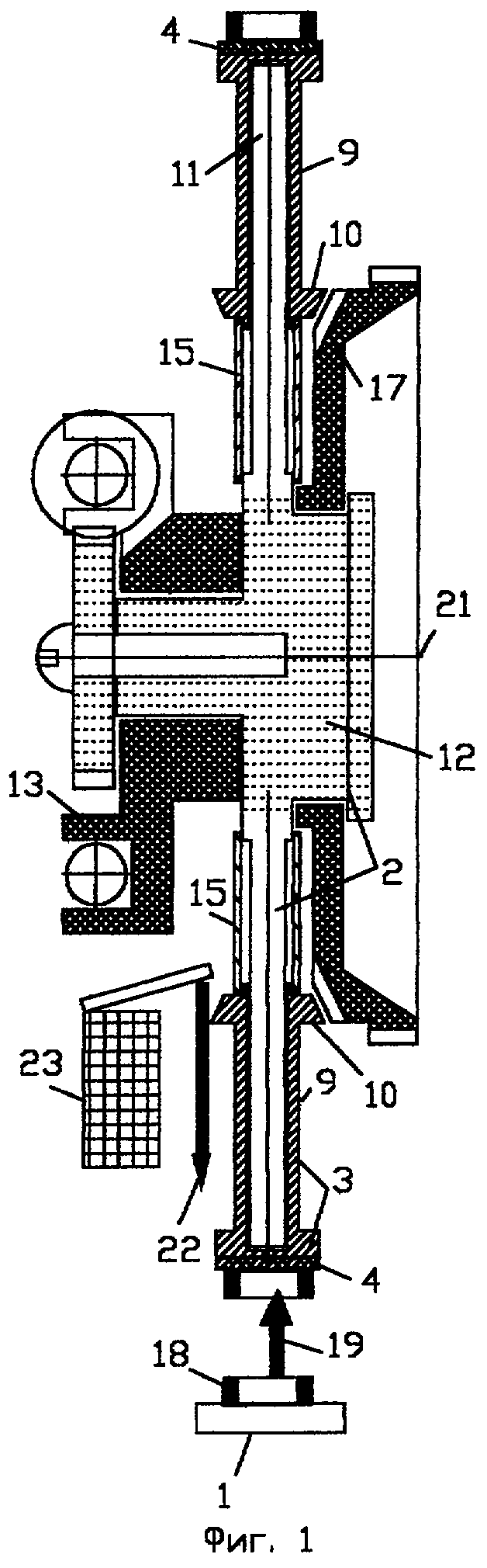
| СПОСОБ ОРИЕНТИРОВАНИЯ ИЗДЕЛИЙ РАЗЛИЧНОЙ ФОРМЫ ПРИ ИХ ТРАНСПОРТИРОВАНИИ ИМ.Л.П.ПЕТРЕНКО-ВЕРСИЯ VI | 2001 |
|
RU2203209C1 |
| Устройство для транспортировки микросхем | 1978 |
|
SU750769A1 |
| Устройство для ориентации деталей цилиндрической формы с выступом на одном из торцев | 1984 |
|
SU1192179A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |

