Изобретение относится к области радиоэлектронных технологий, а именно к способу и устройству ориентирования изделий различной формы, например радиоэлектронных компонентов, при их транспортировании, и может быть использовано в малогабаритных автоматах поверхностного монтажа.
Известен способ ориентирования изделий различной формы при их транспортировании (см. заявку №2001121959 от 07.08.2001 г.), согласно которому формируют строчные последовательности изделий в плоскости вращения с последующим переносом их на общий носитель элементом переноса, при этом вводят дополнительные элементы переноса изделий, образуя совокупность элементов переноса изделий, которые располагают либо в радиальных направлениях, либо в смещенных радиальных направлениях, причем ось вращения совокупности элементов переноса изделий располагают либо компланарно оси вращения одной или двум плоскостям формирования строчной последовательности изделий, либо соосно, над которой или которыми располагают совокупность элементов переноса изделий, при этом общий носитель располагают с возможностью непрерывного или дискретного смещения под сформированной совокупностью элементов переноса изделий и на него осуществляют перенос и фиксацию строчных последовательностей изделий с соответствующих элементов переноса изделий. При этом элемент переноса строчной последовательности изделий со стороны приема строчной последовательности выполняют со смачиваемой поверхностью (прототип).
Известный прототип имеет технологические возможности, которые заключаются в возможности использовать простейший элемент (смачиваемую поверхность) для приема и последующего переноса изделия строчной последовательности на поверхность общего носителя, что позволяет использовать его в технологии поверхностного монтажа, при этом надежность приема изделия различной формы существенно зависит от идентичности перемещения каждого элемента переноса в своей совокупности.
Технологическим и техническим результатом предложенного изобретения является повышение надежности известного способа, в частности возвратно поступательное смещение элементов переноса со смачиваемой поверхностью осуществляют под углом к радиальному направлению относительно оси вращения совокупности элементов переноса с возможностью разворота вокруг своего позиционного положения, а вращение совокупности элементов переноса осуществляют либо в горизонтальной, либо в вертикальной плоскости, при этом контролируемое смещение совокупности элементов переноса осуществляют вдоль фиксированной строчной последовательности общего носителя как в прямом, так и в обратном направлениях, который смещают построчно.
Указанный технологический и технический результат достигается следующим способом и устройством.
Способ ориентирования изделий различной формы при их транспортировании, согласно которому в зоне приема располагают изделия строчных последовательностей для последующего переноса их на общий носитель смоченной поверхностью последовательной совокупностью элементов переноса, которую выполняют с возможностью вращения, при этом каждый из элементов переноса выполняют с возможностью возвратно-поступательного смещения для приема изделий и установки или фиксации их в соответствующих позиционных положениях на общем носителе, при этом каждый элемент переноса имеет возможность разворота вокруг своего позиционного положения, вращение совокупности элементов переноса осуществляют либо в горизонтальной, либо в вертикальной плоскости, при этом общий носитель смещают построчно, а контролируемое смещение совокупности элементов переноса вдоль фиксированной строчной последовательности общего носителя осуществляют как в прямом, так и в обратном направлениях.
Устройство ориентирования изделий различной формы при их транспортировании, содержащее узел формирования строчных последовательностей изделий и узел приема и переноса изделий строчной последовательности в виде совокупности элементов переноса со смачиваемой жидкостью поверхностью с возможностью вращения, которые расположены в общем корпусе, узел смачивания элементов переноса, общий носитель, при этом общий корпус совокупности элементов переноса выполнен из двух частей, одна из которых расположена с возможностью управляемого смещения на двух смещенных друг относительно друга направляющих осях, одна из последних выполнена с винтовым каналом и связана с шаговым двигателем, при этом на первой части общего корпуса расположены электромагниты управления и первый, и второй шаговые двигатели, а другая часть общего корпуса выполнена с возможностью вращения вокруг оси первой указанной части общего корпуса, на указанной оси между двух частей общего корпуса расположена шестеренка с двумя зубчатыми поверхностями, одна из которых функционально связана с первым шаговым двигателем, а другая выполнена конической и функционально связана с коническими шестеренками элементов переноса, которые расположены в направляющих отверстиях второй части общего корпуса, который посредством зубчатой поверхности функционально связан со вторым шаговым двигателем, причем элемент переноса со смачиваемой поверхностью имеет возможность возврата в исходное положение под действием цилиндрической пружины, при этом общий носитель имеет возможность построчного смещения, а совокупность элементов переноса имеет возможность контролируемого смещения вдоль фиксированной строчной последовательности общего носителя как в прямом, так и в обратном направлениях.
На фиг.1-3 изображено устройство, которое реализуют предложенный способ.
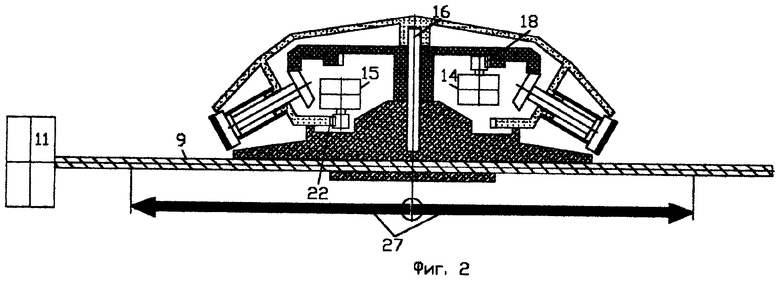
Устройство содержит узел формирования строчных последовательностей 1 и узел приема и переноса изделий 2 строчной последовательности в виде совокупности элементов переноса 3 со смачиваемой жидкостью поверхностью 4 с возможностью вращения, которые расположены в общем корпусе 5, узлом смачивания элементов переноса, общий носитель 6, при этом общий корпус 5 совокупности элементов переноса 2 выполнен из двух частей 7 и 8, одна из которых 7 расположена, с возможностью управляемого смещения, на двух смещенных друг относительно друга направляющих осях 9 и 10, одна из которых 9 выполнена с винтовым каналом и связана с шаговым двигателем 11, при этом на первой части 7 общего корпуса 5 расположены электромагниты управления 12, 13 и первый, и второй шаговые двигатели 14 и 15, а другая часть 8 общего корпуса 5 выполнена с возможностью вращения вокруг оси 16 неподвижной часта 7 общего корпуса 5, на которой между двух частей 7 и 8 общего корпуса 5 расположена шестеренка 17 с двумя зубчатыми поверхностями 18 и 19, одна из которых 18 функционально связана с первым шаговым двигателем 14, а другая 19 выполнена конической и функционально связана с коническими шестеренками 20 элементов переноса 3, которые расположены в направляющих отверстиях 21 второй части 8 общего корпуса 5, который посредством зубчатой поверхности 22 функционально связан со вторым шаговым двигателем 15, а смачиваемая поверхность 4 каждого из элементов переноса 3 и соответствующее направляющее отверстие 21 общего корпуса 5 функционально связаны цилиндрической пружиной 23.
Работа устройства заключается в следующем.
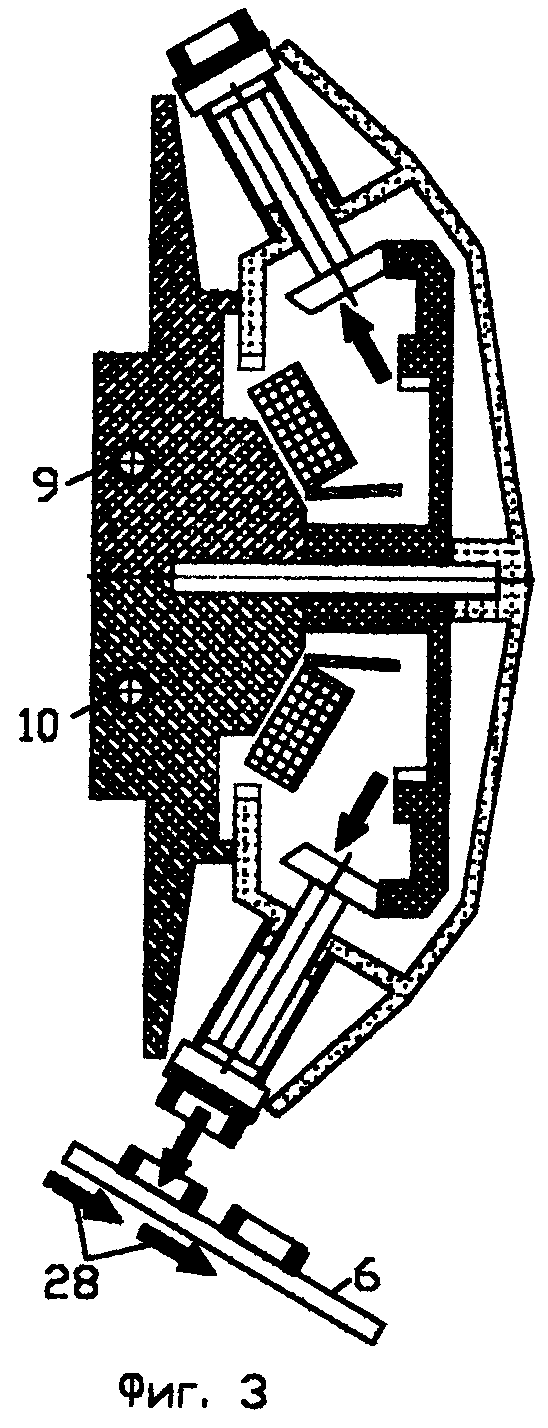
В зоне приема или узле формирования строчных последовательностей 1 располагают кассеты с изделиями с возможностью вращения их для последующего приема 24 и переноса их на общий носитель 6 смоченной поверхностью 4 последовательной совокупностью элементов переноса 3, которую выполняют с возможностью вращения, при этом каждый из элементов переноса 3 выполняют с возможностью возвратно поступательного смещения посредством электромагнитов 12 и 13 для приема изделий 25 и установки 26 или фиксации их в соответствующих позиционных положениях на общем носителе 6, при этом возвратно-поступательное смещение элементов переноса 3 со смачиваемой поверхностью 4 осуществляют под углом к оси вращения 16 совокупности элементов переноса 3 с возможностью разворота вокруг позиционного его положения, при этом вращение совокупности элементов переноса 3 осуществляют либо в горизонтальной фиг.1, либо в вертикальной фиг.2 и 3 плоскости посредством шагового двигателя 15.
Другими словами, в зоне приема или узле формирования строчных последовательностей 1 осуществляют последовательную смену кассет с изделиями путем вращения. Одновременно с этим осуществляют управляемое вращение посредством второго шагового двигателя 15 элементов переноса 3. При совмещении элемента переноса 3 с кассетой с изделием 25 на электромагнит 12 подают импульсный сигнал и подвижная часть его воздействует 26 на коническую шестеренку 20 элемента переноса 3. В результате элемент переноса 3, смещаясь в направляющем отверстии 21, прижимает смачиваемую поверхность 4 к изделию 25, которое прилипает к смоченной поверхности 4, а цилиндрическая пружина 23 возвращает элемент переноса 3 в исходное положение с изделием 25. После приема изделия 25 элементом переноса 3 шаговым двигателем 15 разворачивает элемент переноса 3 и располагает изделие напротив общего носителя 6 и посредством электромагнита 13 переносят 26 изделие на него, которое переклеивается на общий носитель 6, поскольку предварительно в данном позиционном положении была нанесена паяльная паста или клеящее вещество.
В случае, если изделие на общий носитель 6 необходимо установить с другой ориентацией, то в этом случае посредством шагового двигателя 14 разворачивают коническую шестеренку 20 элемента переноса 3 на соответствующий угол, после чего электромагнит 13 переносит 26 изделие на общий носитель 6, а после возвращения элемента переноса 3 в исходное положение шестеренка 17 возвращает элемент переноса 3 в прежнее положение.
Другими словами, предварительно совокупность элементов переноса 3 располагают напротив узла смачивания и осуществляют смачивание смачиваемых поверхностей 4 элементов переноса 3, затем располагают их напротив изделий 25 и осуществляют последовательный набор соответствующих изделий строчных последовательностей на соответствующие элементы переноса 3, после чего смещают совокупность элементов переноса в зону общего носителя и осуществляют построчное смещение 27 фиг.2 и установку или фиксацию изделий на общем носителе 6, который построчно смещают 28.
Использование изобретения позволяет повысить надежность работы малогабаритных автоматов поверхностного монтажа.
Изобретение относится к области радиоэлектронных технологий и может быть использовано при построении принципиально новых малогабаритных автоматов поверхностного монтажа. Способ ориентирования изделий различной формы при их транспортировании заключается в том, что в зоне приема располагают изделия строчных последовательностей для последующего переноса их на общий носитель смоченной поверхностью последовательной совокупностью элементов переноса, которую выполняют с возможностью вращения. Каждый из элементов переноса выполняют с возможностью возвратно-поступательного смещения для приема изделий и установки или фиксации их в соответствующих позиционных положениях на общем носителе. Каждый элемент переноса имеет возможность разворота вокруг своего позиционного положения. Вращение совокупности элементов переноса осуществляют либо в горизонтальной, либо в вертикальной плоскости. Общий носитель смещают построчно. Контролируемое смещение совокупности элементов переноса вдоль фиксированной строчной последовательности общего носителя осуществляют как в прямом, так и в обратном направлениях. Технический результат - повышается надежность работы малогабаритных автоматов поверхностного монтажа. 2 н.п. ф-лы, 3 ил.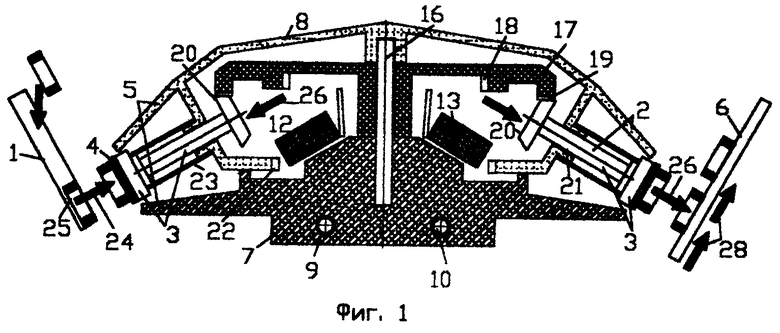
| СПОСОБ ОРИЕНТИРОВАНИЯ ИЗДЕЛИЙ РАЗЛИЧНОЙ ФОРМЫ ПРИ ИХ ТРАНСПОРТИРОВАНИИ ИМ.Л.П.ПЕТРЕНКО-ВЕРСИЯ VI | 2001 |
|
RU2203209C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ИЗДЕЛИЙ РАЗЛИЧНОЙ ФОРМЫ ПРИ ИХ ТРАНСПОРТИРОВАНИИ ИМ. Л.П.ПЕТРЕНКО - ВЕРСИЯ П | 1999 |
|
RU2170206C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ИЗДЕЛИЙ РАЗЛИЧНОЙ ФОРМЫ ПРИ ИХ ТРАНСПОРТИРОВАНИИ ИМ.Л.П.ПЕТРЕНКО - ВЕРСИЯ V | 2001 |
|
RU2203211C1 |
| Способ получения резьбы | 1988 |
|
SU1662777A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ эксплуатации добывающих галерей уклонных блоков при термошахтной разработке нефтяных месторождений | 2015 |
|
RU2624838C1 |

