1
Изобретение относится к оборудованию подвесных канатных дорог и предназначено для использования в первую очередь на пассажирских канатных дорогах маятникового тИпа.
Известны электроприводы подвесных канатных дорог с маятниковым движением сосудов, включающие в себя приводной двигатель, редуктор, приводной шкив и два подвижных натяжных груза тягового каната, размещенных между указанным 1Ш КИВО:М и сосудами.
Однако они «е обеспечивают демпфирования колебаний тягового каната и достаточной точности остановки подвесных сосудов.
Цель изобретения - демпфирование колебаний тягового каната и повышение точности остановки сосудов.
Это достигается тем, что предлагаемый электропривод дополнительно снабжен асинхронным короткозамкнутым двигателем, нагруженным через второй редуктор на барабан с горизонтальной осью вращения, который связан с хвостовым «анатом, закрепленным на подвижных натяжных грузах.
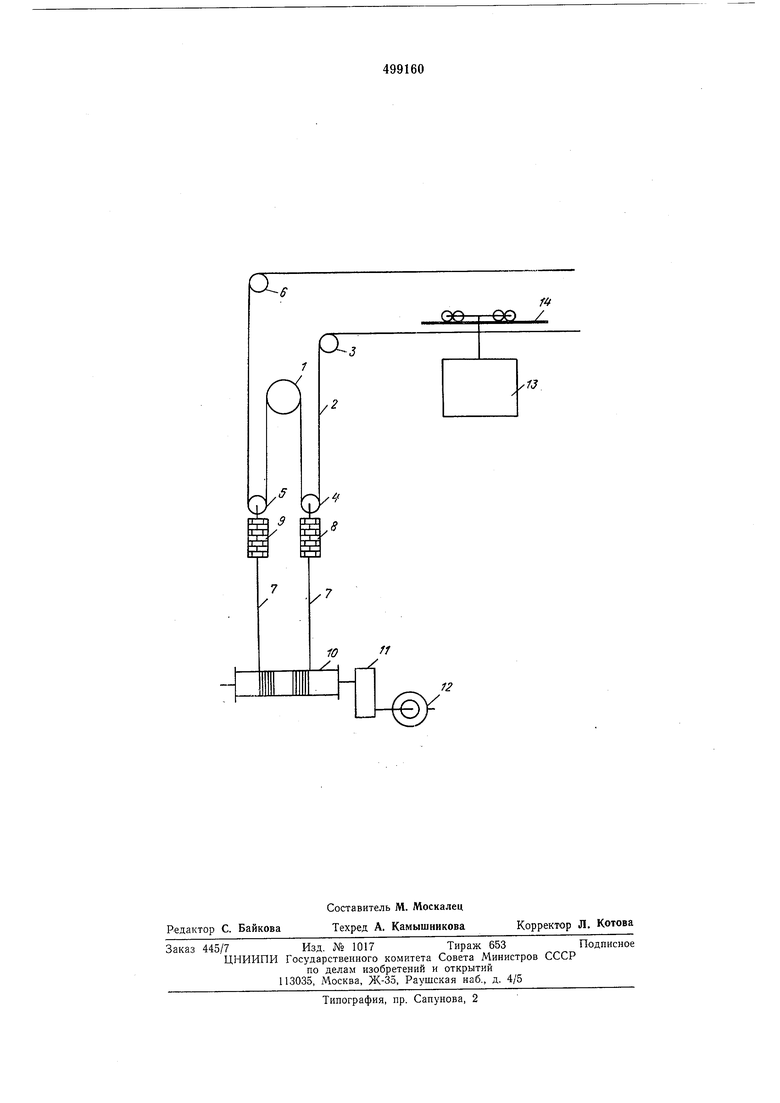
На чертеже представлена принципиальная схема описываемого привода, где: 1 - приводной шкив, 2 - тяговый канат, который огибает приводной щкив 1, и направляющие
ш-кивы 3-6. К Щкивам 4 и 5 прикреплен хвостовой канат 7, на котором закрепле}1Ы натяжные грузы 8 и 9. Канат намотан на барабан 10 с горизонтальной осью вращения,
который через редуктор 11 связан с асинхронным короткозамкнутым двигателем 12. Вагон 13 перемещается по несущему канату 14. Работа дороги с применением предлагаемого привода осущест1вляется следующим образом.
В режиме пуска дороги при движении вагона 13 с нижней станции (приводная, на которой расположены натяжные грузы 8 и
9) вверх включаются тормозные электромагниты и тем самым щкив 1 и барабан 10 растормаживаются, одновременно включается приводной двигатель 12, который работает в режиме динамического торможения и тем самым обеспечивается -демпфирование системы. Приводной шкив 1 начинает вращаться по часовой стрелке, натяжной груз 9 ускоряется вверх, а натяжной -груз 8 - вниз, при этом вагон 13 начинает двигаться плавно, без
рывка.
Во время равномерного хода скорость приводного шкива 1 и вагонов постоянна. Двигатель 12 остается включенным для работы в режиме динамического торможения и при
равномерном ходе.
Для перехода на -режим замедления индикатор пути подает импульс на отключение при.водного двигателя, вагон 13 и шкив 1 замедляются. В момент времени, когда скорость дороги снижается до величины близ1КОЙ к «ползучей, затормаживается шкив 1, и двигатель 12 переключается в нормальный режим работы. Натяжной груз 8 перемещается вверх, а натяжной груз 9 - вниз. Ввиду того, что двигатель 12 работает на естественной характеристике, при изменении статической напрузки «ползучая скорость сохраняется постоянной, что приводит к точной остановке вагона 13 у приемной плош,адкй.
Схема привода - симметричная, поэтому при движении вагона 13 с верхней станции вниз процесс пуска, равномерного хода и замедления протекает аналогично предыдущему случаю, с той разницей, что при вращении шкива 1 против часовой стрелки натяжной груз 8 ускоряется вверх, а натяжной (груз 9 - ВНИЗ, и вагон 13 спускается плавно, а при дотягивании, когда затормаживается приводной Щ1КИВ и двигатель 12 работает в двигательном режиме, натяжной -груз 9 перемещается вверх, а натяжной груз 8 - вниз.
Барабан 10 выполняется в виде съемной конструкции и должен обязательно иметь горизонтальную ось вращения. Его закрепление зависит от условия величины наименьшего провеса во избежание появления слабины хвостового каната. На барабане по существу закреплены два хвостовых каната, «о может быть использован и один хвостовой канат, намотанный на барабане.
Для описываемого электропривода несущественно, какой приводной двигатель используется (в данном случае использован короткозамКНутый асинхронный двигатель, который является наиболее экономичным).
Во время дотягивания, при заторможенном шкиве, скорость перемещения натяжного груза в два раза меньше, чем скорость перемещения вагона, благодаря чему высота приводной станции получается небольшой.
Кроме положительных свойств, присущих известным приводам, предлагаемый электропривод характеризуется возможностью регулирования степени демпфирования путем изменения напряжения постоянного тока в цепи статора двигателя 12 при динамическом торможении.
Схема переключения асинхропного короткозамкнутого двигателя 12 с режима динамического торможения на двигательный и, наоборот, не имеет каких-либо особенностей (и может быть осуществлено, например, с помощью обыкновенных реле).
Благодаря такому выполнению устройства, обеспечивается плавный пуск, демпфирование системы, дотягивание на постоянной «ползучей скорости, независимой от статической нагрузки, уменьшение веса натяжных грузов 8 и 9.
Фор1мула изо бретения
Электропривод подвесной канатной дороги, преимущественно с маятниковым движением сосудов, содержащий приводной двигатель, редуктор, приводной шкив и два подвижных натяжных груза тягового каната, размещенных между указанным шкивом и сосудами, отличающийся тем, -что, с целью демпфирования колебаний тягового каната и повышения точности остановки сосудов, он дополнительно снабжен асинхронным короткозамкнутым двигателем, нагруженным через второй редуктор на барабан с горизонтальной осью вращения, который связан с хвостовым канатом, закрепленным на упомянутых натяжных грузах.
/
oe
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод подвесной канатной дороги | 1977 |
|
SU630110A1 |
| ЭЛЕКТРОПРИВОД ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ С МАЯТНИКОВЫМ ДВИЖЕНИЕМ СОСУДОВ | 1973 |
|
SU364060A1 |
| ЭЛЕКТРОПРИВОД ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ | 1971 |
|
SU309655A1 |
| Устройство для управления работой привода подвесной канатной дороги | 1986 |
|
SU1414690A1 |
| Подвесная канатная дорога маятникового типа | 1984 |
|
SU1220984A2 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2000 |
|
RU2184666C2 |
| Подвесная канатная установка | 1983 |
|
SU1142334A1 |
| Способ гашения колебаний тягового каната канатной дороги | 1983 |
|
SU1270045A1 |
| Подвесная канатная дорога маятникового типа | 1978 |
|
SU749716A1 |
| Подвесная канатная дорога маятникового типа | 1979 |
|
SU927603A1 |
/4
Й
