Область техники, к которой относится изобретение
Данное изобретение относится к способу определения момента прохождения ближайшего пункта самолетом, который пролетает в воздушном пространстве над какой-либо точкой местности зоне, а также к способу измерения положения полета данного самолета, направления его полета, курса и уровня издаваемого им шума.
Уровень техники
Точное определение момента прохождения ближайшего пункта самолетом, пролетающим в воздушном пространстве над какой-либо точкой местности на земле, является важным условием, необходимым для повышения точности в различных измерениях, осуществляемых на самолете.
В традиционном способе определяется момент прохождения ближайшего пункта предположением момента прохождения ближайшего пункта за счет удаления компонентов издаваемого шума, беря за основу время отбора его пикового значения, на основании данных изменения уровня шума, полученных от измерения уровня шума, испускаемого с самолета, и также с учетом погодных условий.
Известен также способ, согласно которому при измерении издаваемого самолетом шума получают, вместе с измерением издаваемого самолетом шума, ненаправленный в горизонтальной плоскости, ответный сигнал транспондера на частоте 1090 МГц и сопоставляют его с данными изменения уровня напряженности электрического поля сигнала и с типом самолета и данными о высоте его полета, что позволяет с высокой точностью определять момент прохождения ближайшего пункта, на основании времени отбора пикового значения напряженности электрического поля (см. опубликование японской патентной заявки 4-40646).
В общепринятом способе определения момента прохождения ближайшего пункта путем измерения издаваемого упомянутым самолетом шума необходимо выполнять сложный анализ данных с учетом сложных факторов изменения. Причем, точность измерения оказывается недостаточной, а итоговые результаты - неудовлетворительные.
Кроме того, в таком способе определения момента прохождения ближайшего пункта, основанном на измерении уровня шума и пикового значения уровня напряженности электрического поля от радиоволн ответного сигнала транспондера, можно выполнять измерения со сравнительно высокой точностью, однако временное распределение пиков самого ответного сигнала транспондера оказывается ровным, т.е. все еще остаются проблемы в том, что результаты получаются недостаточно точными.
В последних годах интенсивность движения самолетов резко возросла, в частности, нередки случаи, когда в аэропорту в течение суток, бывает, производят посадку и взлет более 500 бортов, и в районе вокруг аэропорта плотность движения оказывается очень высокой с интервалом движения менее 90 секунд, что приводит к возникновению крайне вредного шумового воздействия.
В случае такой высокой частоты движения самолетов в способе определения момента прохождения ближайшего пункта путем ранее упомянутого измерения уровня шума трудно опознавать различный тип самолетов и в итоге теряется смысл. С одной стороны, в способе приема радиоволн ответного сигнала транспондера почти невозможно принимать пиковое значение напряженности электрического поля, в чем и остаются проблемы нерешенными.
Раскрытие изобретения
Настоящее изобретение относится к способу определения момента прохождения ближайшего пункта путем приема излученных самолетом в направлении вниз радиоволн для измерения высоты над землей на измерительных точках земли и введения в компьютер данных об изменяющемся уровне напряженности электрического поля.
Самолеты оборудуются на нижней поверхности корпуса 1-3 антеннами с острой направленностью прямо вниз, передающими в направлении земли радиоволны для определения высоты над землей и обычно летают с испусканием направленных радиоволн сигнала качания 4,3 ГГц (у военных самолетов импульсные сигналы излучаются в зоне с частотой 4,3 ГГц или выше) в виде диаграммы излучения 30 (в переднем направлении, 20° в заднем, а также 50-60° в правую и левую сторону, однако по-разному зависимо от их моделей.
Таким образом, прием радиосигнала для упомянутого определения высоты относительно земли в какой-либо точке земли и потом введение в компьютер и регистрация компьютером в нем данных о колебаниях уровня напряженности электрического поля позволяют получать формы волны изменения напряженности электрического поля в то течение, когда радиоволны с самолета для измерения высоты относительно земли проходят через эту точку в виде диаграммы излучения. Данное пиковое значение показывает на прохождение вертикальной плоскости под прямым углом к направлению полета, включающую вертикальную прямо вниз ось самолета, момент которого может рассматриваться моментом прохождения ближайшего пункта.
Когда самолет пролетает строго вертикально над точкой измерения, то продолжительность приема данных об изменении уровня напряженности электрического поля увеличивается, а данное пиковое значение напряженности оказывается максимальным, однако при отклонении курса самолета от вертикали в сторону, продолжительность приема данных сокращается и пиковые значения напряженности также уменьшаются. С одной стороной в зависимости от высоты полета изменяются диапазон отбора данных, продолжительность их приема и напряженность в пиковом значении и подобные.
Тем не менее, так как подъемы и падения до пикового значения происходят очень быстро, все же возможно точно определять момент прохождения ближайшего пункта, поскольку принимаются пиковые значения.
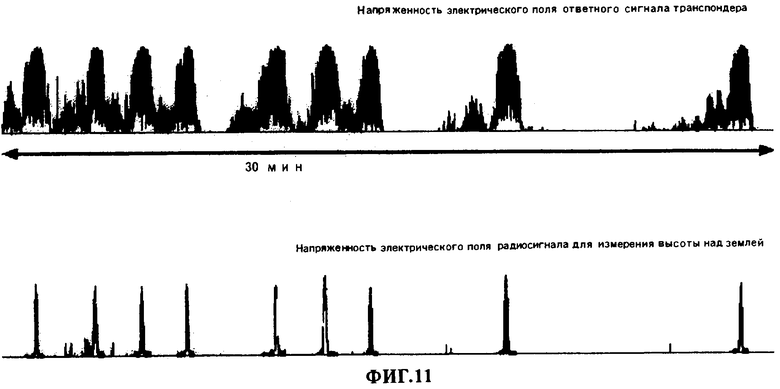
На фиг.9 приведена распечатка графика компьютерной регистрации колебаний в 30-минутном интервале уровня напряженности электрического поля радиоволн для измерения высоты относительно земли путем приема как радиоволн для измерения высоты относительно земли, так и радиоволн ответного сигнала транспондера, излученных поднимающимся самолетом на высоте порядка 700 м прямо под курсом влета-посадки над окружающим лесистым районом к северу в 5 км от северного конца взлетно-посадочной полосы аэропорта Нарита. Тогда, когда пиковая величина принимаемого сигнала радиоволн для определения высоты согласно данному изобретению весьма остра, пиковая величина от ответного радиосигнала транспондера расплывчата и неясна.
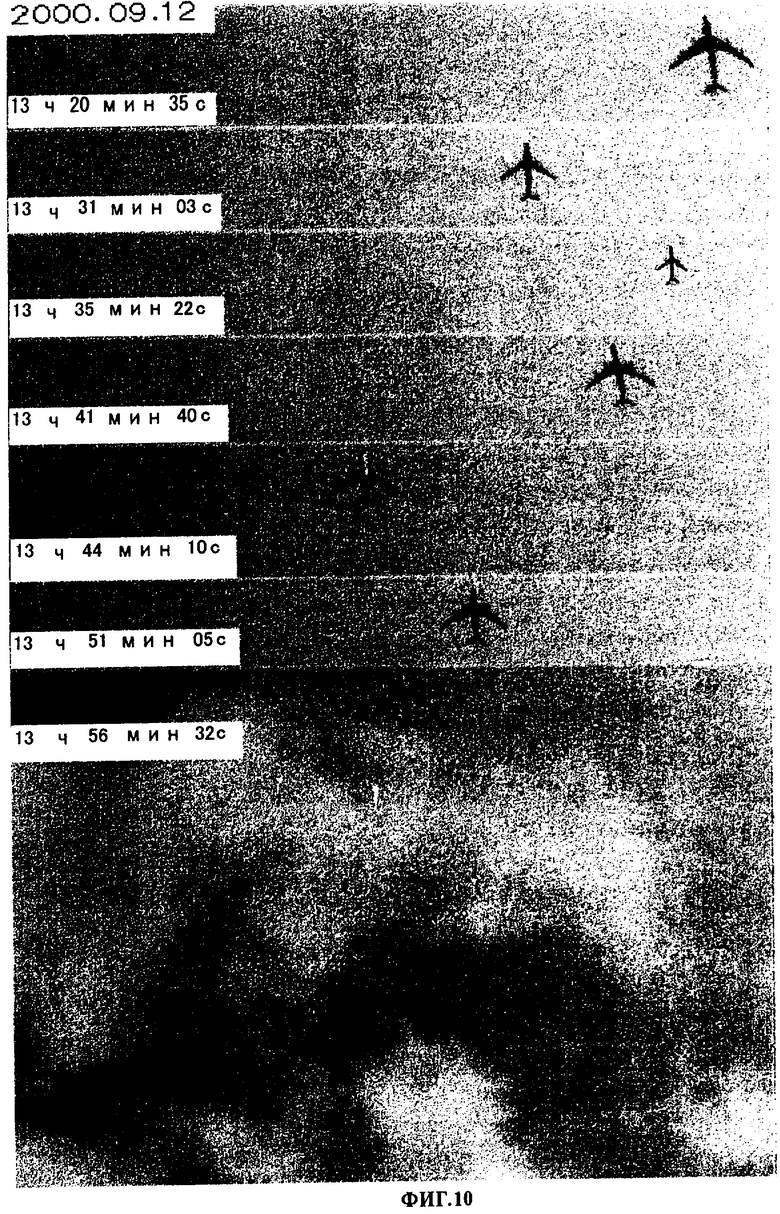
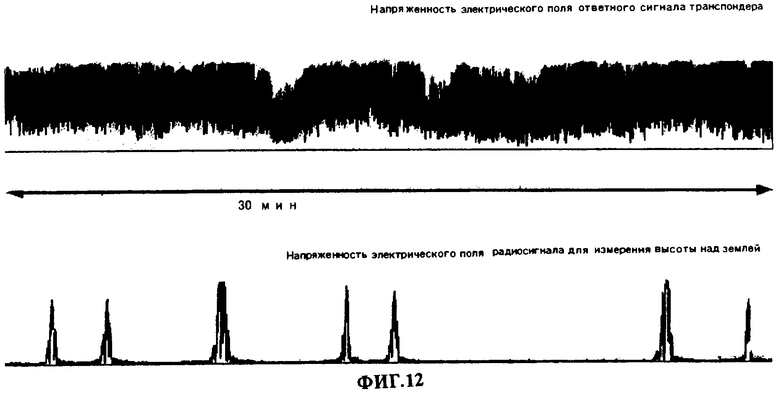
На фиг.10 приведены сопоставительные данные, аналогичные данным из фиг.9, касающиеся самолета в полете со снижением на высоте порядка 1500 м прямо под посадочным курсом примерно в 20 км к югу от южного края аэропорта Нарита. Данная точка расположена на берегу моря, откуда открывается все небо, с этим получаются одновременно радиоволны ответных сигналов транспондера от многочисленных самолетов, находящихся в широкой области всегда на высоком уровне. С одной стороны, это приводит к затруднению различить сигнал отдельно. Тем более, величины отдельных пиков становятся совершенно неясными тогда, когда радиосигналы для измерения высоты согласно данному изобретению отбираются ясно и остро, как и для случая, приведенного на фиг.9.
Примеры измерения ответных сигналов упомянутого транспондера указывают на случай использования ненаправленных антенн для приема любых радиосигналов. Однако если рассчитывать на воздушную трассу, где направление и курс самолета в полете почти определены, можно принимать ответные сигналы каждого самолета в отдельности при ограничении области приема с помощью однонаправленных антенн, которые эффективно используются в качестве информации о сближении, однако в отношении точности измерения - она недостаточна в качестве информации о прохождении ближайшего пункта, поскольку данная ширина пикового значения растянута ровно и, в частности, направленность установленной на самолете антенны транспондера по отношению к вертикали вниз равна нулю (чувствительность - 0).
Настоящее изобретение предназначено не только для точного определения момента прохождения ближайшего пункта с использованием излучаемых самолетом в направлении вниз радиоволн для измерения высоты над землей, но и для ограничения с помощью направленных вверх антенн можно ограничивать область измерения приема сигнала с помощью антенны с направленностью вверх, особенно, так как данные радиоволны поляризованы горизонтально к направлению полета, можно ограничивать область приема данных сигналов в диапазоне вдоль основной авиатрассы с использованием поляризованной антенны с однонаправленностью. Например, в аэропортах с параллельными авиатрассами автоматически и с высокой точностью можно измерять время прохождения взлетающего или садящегося самолета, количество таких самолетов, интервалы между рейсами и т.д. с помощью несколько поляризованных антенн, соответствующих каждой взлетно-посадочной трассе соответственно.
Известны характеристики направленности подобных однонаправленных поляризованных антенн. Например, коэффициент направленности D поляризованной антенны с диполем λ/2 рассчитывается из зависимости:
D(θ)=cos(π/2·cosθ)/sinθ
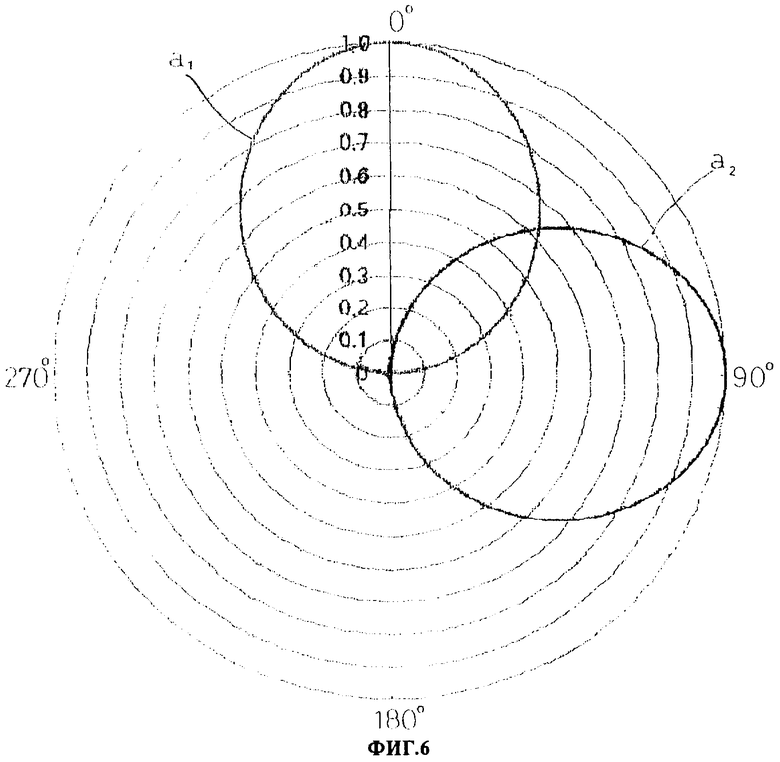
Диаграмма подобной направленности, показанная в виде эллипса, длинная ось которого является осью направления (приведена на фиг.6).
Таким образом, если, совмещая одновременно несколько поляризованных однонаправленных антенн с диполем λ/2 устанавливают их таким образом, чтобы, по меньшей мере, у одной из антенн поставили ось направления строго вверх, а у других бы различались ориентация оси направления и/или плоскость поляризации друг с друга, то наряду с точным определением момента прохождения самолетом ближайшего пункта, можно на данный момент времени из точки измерения положения самолета в воздушном пространстве получать базовые данные об ориентации по азимуту, углу возвышения, а также данные о направлении движения борта.
Например, если, установив вместе две поляризованные антенны (a1, а2) с диполем λ/2 (на фиг.1 они обозначены как антенны А и В) с осями направленности, ориентированными вертикально вверх и с горизонтально ортогональными элементными осями так, чтобы их плоскости поляризации для приема сигналов были ортогональными, прием радиосигналов самолета для измерения его высоты позволяет обнаруживать, что оба выходных сигнала в момент прохождения данным самолетом ближайшего пункта показывают пиковое значение и соотношение этих пиковых значений напряженности в зависимости от азимута положения самолета в данный момент является установленной численной величиной, отражающей соотношение коэффициентов направленности, таблица 1.
Например, пиковая величина у поляризованной антенны a1 и молчание поляризованной антенны а2 означает, что самолет находится по оси направленности a1. Соотношение же величин сигналов a1, а2, равное 1, означает, что самолет находится с азимутом в 45° или 135° по отношению к осям направленности антенн. Соотношения величин сигналов вне этого значения означает, что самолет находится в положении вне указанного азимута.
На фиг.6 приведены характеристики направленности обеих антенн a1 и а2 для данного случая. В таблице 2 даны соответствующие коэффициента направленности обеих антенн и отношение обеих коэффициентов направленности согласно направлению прибытия радиоволн. В соответствии с этим можно получать азимутальные базовые данные, касающиеся положения самолета в воздушном пространстве.
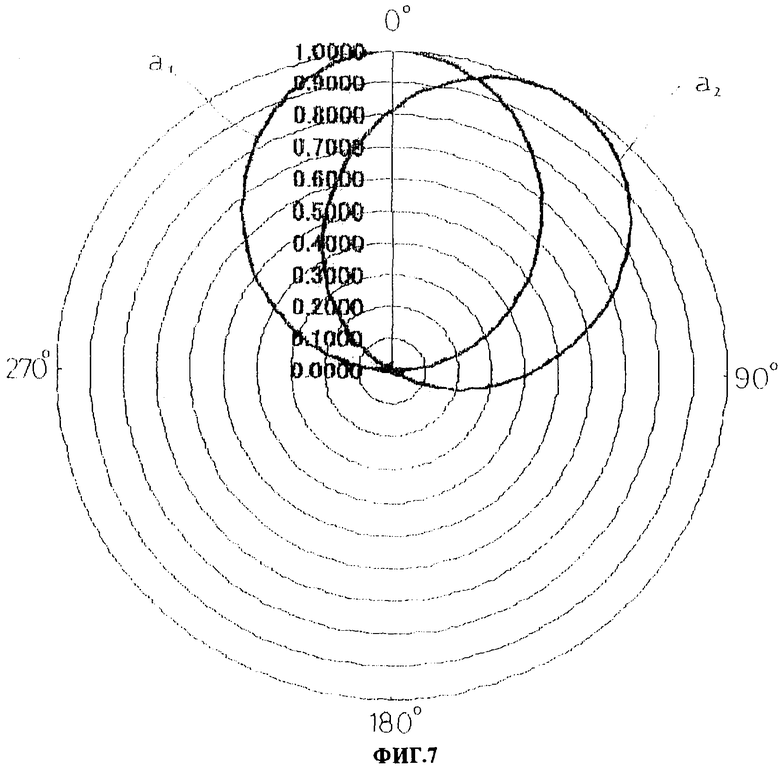
Далее, если две поляризованные антенны a1 и а2 с диполем λ/2 разместить с их элементными полюсами в горизонтальном и параллельном направлении так, чтобы их плоскости поляризации приема сигналов совпадали, и чтобы у антенны a1 ось направленности смотрела вертикально вверх, а ось направленности антенны а2 смотрела бы в небо вверх под углом в 30° к вертикали, то получится характеристика направленности, приведенная на фиг.7. И величины коэффициентов направленности их антенн и отношение обоих коэффициентов направленности приведены в таблице 2. Отношение обоих коэффициентов определяется в зависимости от положения самолета в воздушном пространстве установленными величинами.
Следовательно, в зависимости от момента времени пиковой величины сигнала у антенны a1 можно не только определять момент прохождения самолетом ближайшего пункта, но также в зависимости от соотношения сигнала с антенны а2 к вышеуказанному сигналу в пиковом значении можно получать данные об угле возвышения к вышеуказанному положению самолета из пункта измерения на этот момент.
Устройства приема радиосигналов с двумя упомянутыми поляризованными антеннами главным образом используются эффективно для определения момента прохождения самолета во время его движения вдоль установленный авиатрассы, для определения количества проходящих самолетов и т.д. К тому же, совместное использование некоторых комплектов из двух антенн может приводить в расширение измеряемого воздушного пространства, а также в повышение точности определения направления прямолинейного движения самолета и азимута его движения.
Например, если использовать устройства приема радиосигналов 10-канального типа с 4-мя совмещенными поляризованными антеннами с наложением соответствующих плоскостей поляризации радиоприема от совмещенных антенн a1 и а2 и с наклонением их направленности по отношению к вертикальной оси по четырем сторонам воздушного пространства, то становится возможным проводить измерения для всех направлений полетов.
Однако в таком случае есть проблема в том, что возрастает сложность обработки данных о приеме сигналов от 10 каналов и резко увеличивается стоимость приемного оборудования и компьютеров.
На практике можно использовать 6 совмещенных поляризованных антенн, две из которых должны быть размещены так, чтобы оси их направленности смотрели вертикально вверх, а плоскости поляризации принимаемых сигналов были ортогональны, и остальные четыре антенны установлены так, чтобы их оси направленности смотрели под углом вверх, а плоскости поляризации принимаемых сигналов совпадали с положением упомянутых направленных вверх антенн. Здесь следует установить соответственные оси направления в наклонном положении с раскрытием вверх в небо так, чтобы воздушное пространство делилось на 4 части. Если использовать их в качестве 6-ти канального устройства и вводить в компьютер данные об изменении уровня напряженности электрического поля от соответственных радиосигналов, то могут определять, наряду с определением момента прохождения самолетом ближайшего пункта, азимут положения самолета в воздухе в данный момент, данные об угле возвышения и направление его полета. С одной стороны, становится возможным экономично и эффективно измерять параметры, касающиеся самолетов, пролетающих по заданной авиатрассе.
Кроме того, наряду с определением момента прохождения ближайшего пункта, благодаря приему упомянутых радиоволн для измерения высоты, приведение в соответствие со времени измерения соответствующих данных о номерах борта по приему ответного сигнала, переданного от самолета транспондеру, и сигнала опознавания об измерении высоты полета самолета, а также уровня производимого им шума, с моментом времени измерения, может повышать надежность различных измерений, связанных индивидуально с каждым самолетом. В частности, среди общих шумовых данных можно крайне точно и легко опознавать шумы, испускаемые самолетами по отдельности.
В таком случае допускается пункты приема радиосигналов для измерения высоты, пункт приема ответного сигнала транспондера и пункт измерения шума объединить в один или же выполнять в виде отдельных, изолированных друг от друга пунктов.
Так, расположив под авиатрассой на расстоянии 2-4 км друг от друга несколько пунктов определения прохождения ближайшего пункта, а в необходимых местах между ними - несколько пунктов измерения шума, а также в произвольных местах пункты приема ответных сигналов транспондера, можно, путем сбора упомянутых данных измерения в вычислительном центре, определять режимы полета самолета, его курс и т.д., а также надежно и легко определять состояние распределения самолетных шумов над определенной территорией.
В данном изобретении данные о колебаниях уровня электрического поля радиоволн для измерений высоты, которые получаются от направленной вверх антенны, получаются за 5-10 секунд до момента прохождения самолетом ближайшего пункта на высоте менее 2000 метров, где возможно вызывать распространение шума до этого пункта измерения, и потом обнаруживаются за 2-3 секунды резкие колебания интенсивности. Так что если на поверхности земли под авиатрассой установить момент включения фотокамеры, у которой установлено поле зрения на направление вертикально вверх, то тогда, когда интенсивность электрического поля достигнет определенного значения, можно легко регистрировать эффективные данные о прохождении самолета.
Краткое пояснение к чертежам
Фиг.1 - вид в плане совмещенного расположения 6-ти поляризованных антенн согласно практическому примеру 1;
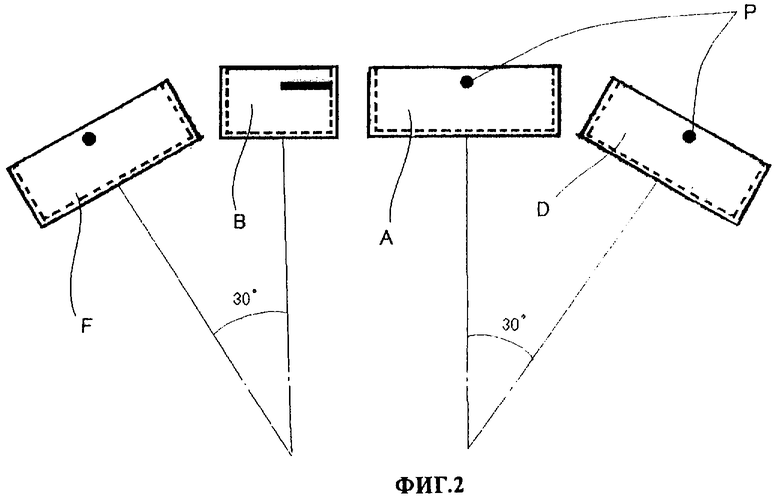
Фиг.2 - вид сбоку расположения 4-х поляризованных антенн по оси х-х на фиг.1;
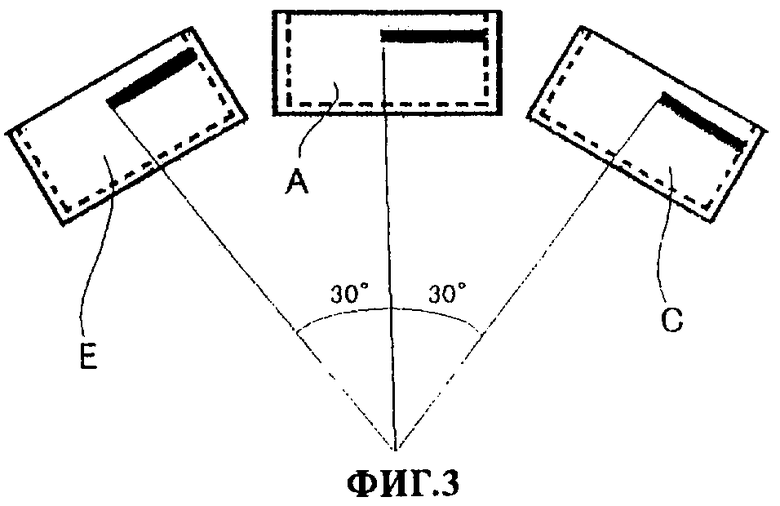
Фиг.3 - вид сбоку расположения 3-х поляризованных антенн по оси у-у на фиг.1;
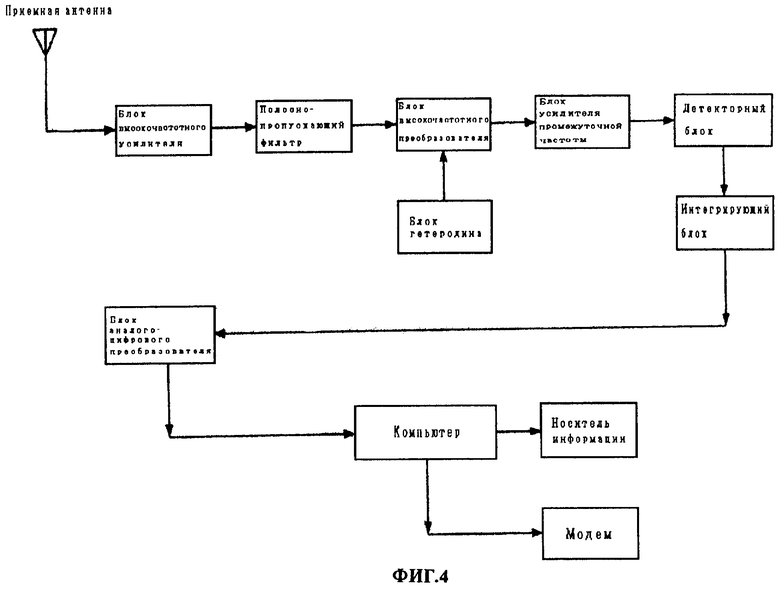
Фиг.4 - блок-диаграмма схемы для измерения напряженности электрического поля радиоволн, используемых для измерения высоты положения самолета относительно земли;
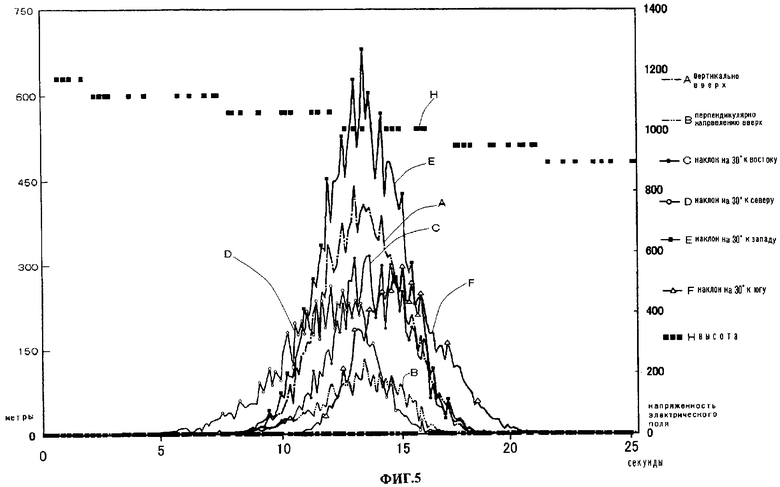
Фиг.5 - распечатка индикаторной диаграммы поступающих и регистрирующихся в компьютере данных;
Фиг.6 - индикаторная диаграмма для случая 2-х взаимно ортогональных поляризованных антенн с диполем λ/2 в ортогональном положении;
Фиг.7 - диаграмма направленности для случая 2-х поляризованных антенн с диполем λ/2, установленных с осью направленности под углом 30°;
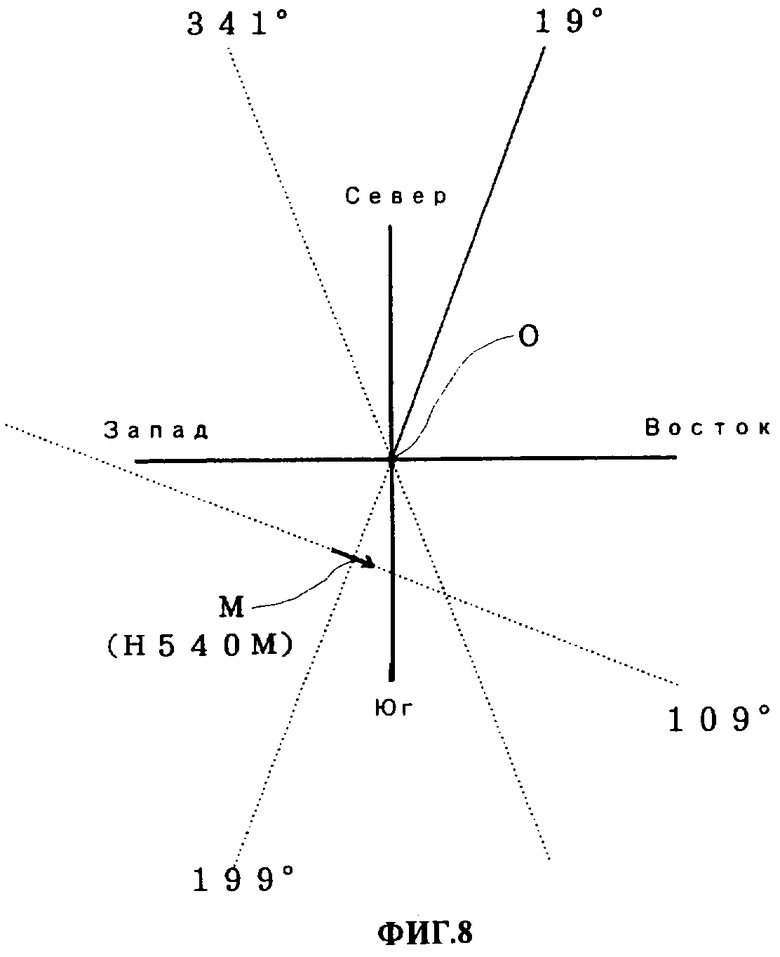
Фиг.8 - индикаторная схема положения самолета на карте в момент его прохождения ближайшего пункта М и направления его полета, полученные на основании собранных данных из фиг.5;
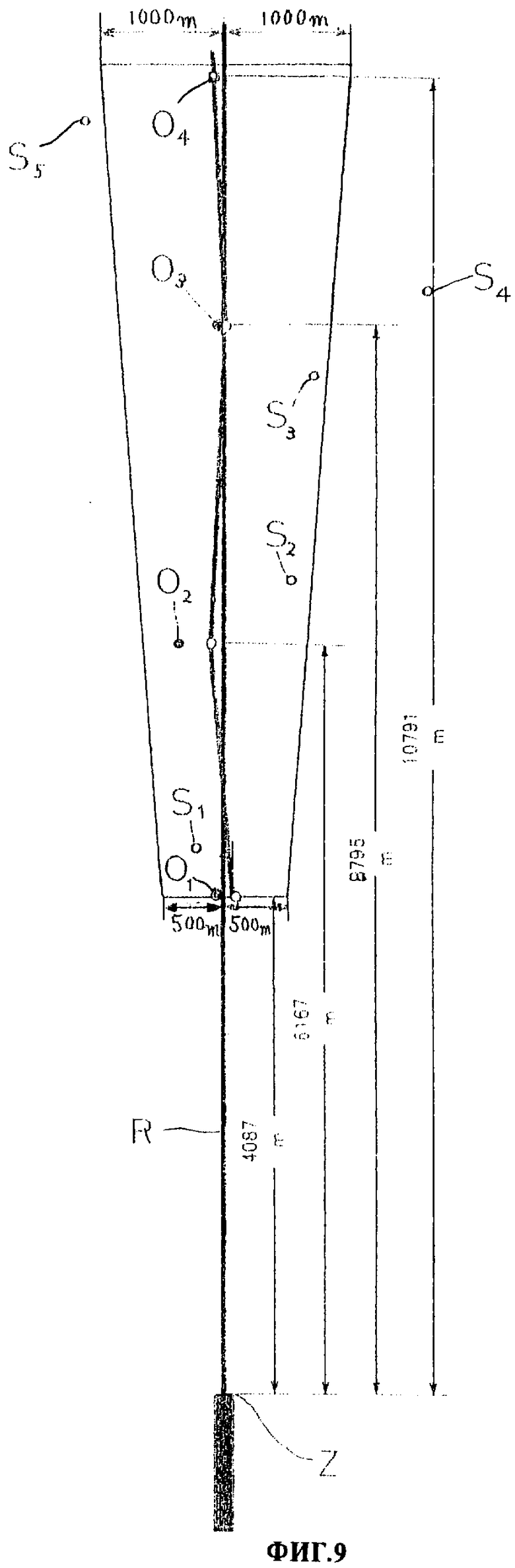
Фиг.9 - схема расположения в 4-х точках определения момента прохождения ближайшего пункта вдоль авиатрассы согласно практическому примеру 2 и 5-ти точек измерения шума в их промежуточных положениях;
Фиг.10 - часть обработанных, снятых видеокамерой фотокадров самолетов, проходящих в воздушном пространстве согласно практическому примеру 3;
Фиг.11 - индикаторная диаграмма изменения уровня напряженности поля одновременно принимаемых обеих радиоволн для измерения высоты положения самолета относительно земли и радиоволн ответных сигналов транспондера; и
Фиг.12 - индикаторная диаграмма, аналогичная фиг.11, для случая измененной точки измерения.
Условные обозначения
А, В, С, D, Е, F: поляризованные антенны
Р: элементная ось
Н: высота полета
М: ближайший пункт
О: точка измерения момента прохождения ближайшего пункта
S: точка измерения шума
R: установленная авиатрасса
Z: начало взлетно-посадочной полосы
Оптимальные примеры реализации изобретения
Пример 1
В 5-ти километрах к северу от северного конца взлетно-посадочной полосы аэропорта Нарита, на верхних концах 2-метровых опор жестко установили совмещенное как показано на фиг.1 приемное устройство 6-канального типа, состоящее из 6 совмещенных поляризованных антенн для приема радиоволн для измерения высоты полета самолета над землей, и также антенны для приема ответных сигналов транспондера сбоку от опор, с этим сигналы, принимаемые соответствующими антеннами для приема ответных сигналов транспондера, через схему, приведенную в виде блок-диаграммы на фиг.4, вводятся в компьютер и регистрируются компьютером в виде данных об изменении уровня напряженности их электрического поля.
Фиг.5 - данные, показывающие изменения каждого вида данных.
На фиг.1 приведен вид в плане, указывающий на вариант размещения, в котором совмещены 6 поляризованных антенн с диполем λ/2 (для приема сигналов в зоне 4 ГГц) и половинным углом почти в 80° (для измерения высоты над землей. На фиг.2 дан вид сбоку, указывающий на условие размещения по его оси х-х. На фиг.3 дан вид сбоку, указывающий на условие размещения по его оси у-у.
Антенны А и В установлены с направленностью вертикально вверх так, чтобы их элементные оси Р были горизонтальны, а плоскости поляризации были ортогональны. Антенны С, D, Е, F установлены вокруг вертикальной оси с наклоном к ней соответственно под 30° и направлены в небо по четырем направлениям: на восток, север, запад и юг. Элементные оси Р антенн D, F и А горизонтальны и параллельны. Элементные оси Р антенн С, Е ориентированы в одну сторону с антенной А и наклонены в противоположные стороны под углом 30°.
На фиг.5 приведена распечатка графика, показывающего моменты времени по горизонтальной оси графика и величину напряженности электрического поля и высоту полета по вертикальной оси на основе поступающей в компьютер для регистрации информации о колебаниях уровня напряженности электрического поля от радиосигналов и высоте полета по анализу ответного сигнала транспондера путем приема радиоволн для измерения высоты над землей с пролетающего в воздушном пространстве самолета, направляя ось х-х указанных совмещенных антенн в направлении юг-север в пункте измерения.
Согласно фиг.5, момент времени в пиковом значении напряженности электрического поля от направленных вертикально вверх антенн А и В практически совпадают соответственно и показывают момент прохождения самолетом ближайшего пункта. Отношение их пиковых величин напряженности соответственно А820 и В230 (А/В) равно 3,562. С этим направление по азимуту прибытия радиоволн на основании таблицы 1 равно 19° или 341°. Это означает, что самолет пролетающий в момент прохождения ближайшего пункта находится на одном из этих направлений. Величины сигналов с наклоненных в четыре стороны света антенн С (восток), D (север), Е (запад) и F (юг) в момент прохождения пункта находятся в последовательности Е>D>С>F. Это говорит о том, что самолет находится в юго-западном направлении от точки измерения "О" и в вертикальной плоскости с направлением на азимут из точки измерения в 19°+180°. Кроме того, поскольку за около 3 секунды до момента прохождения ближайшего пункта E D>F>C, a примерно через около 3 секунды после момента прохождения ближайшего пункта F Е>С>D, значит, что самолет пролетал на востоко-южно-восточном направлении, через пункт прохождения ближайшего пункта с севера-запада. Далее, на основании того, что отношения пиковой величины А 820 к величине сигнала 1180 с антенны Е в прохождении ближайшего пункта равно 0,695, угол возвышения к положению самолета при прохождении ближайшего пункта равен 42°, как показано в таблице 2, а высота на основании анализа ответного сигнала транспондера в данный момент равна около 540 м.
На основании указанных данных, самолет находится от точки измерения О в направлении по азимуту 199°, с углом возвышения 42° и на высоте 540 м. Данное расстояние от точки измерения по прямой равно 810 м, а по горизонтали в плоскости земли 600 м. Направление полета самолета с запад-юго-запад на восток-юго-восток с азимутом в 109°, ортогональным с вертикальной плоскостью азимута, который упомянут выше.
На фиг.8 дана индикаторная диаграмма, показывающая положение и направление полета самолета на карте на момент прохождения ближайшего пункта на основе указанных данных.
Пример 2
В северном направлении по прямой от северного конца взлетно-посадочной полосы аэропорта Нарита находится система измерения шума с площади в 12 км, включая участок прямо под авиатрассой. Как показано на фиг.9, система размещена в 4 точках приема O1-О4 радиосигналов для измерения высоты с самолета над землей, аналогично примеру 1, расположенных прямо под участком почти вдоль авиатрассы R. В 6 местах в их промежуточном положении находятся точки измерения шума S1-S6. Посредством сбора данных из каждой точки измерения в вычислительном центре получали требуемые данные, соответствующие заданной цели, как следующее.
Обычно взлетающие и садящиеся самолеты в аэропортах должны следовать по установленной воздушной трассе с определенным разрешенным допуском отклонения в стороны. Величина такой разрешенной области в сторону от трассы на расстоянии от начала взлетно-посадочной полосы в 5 км составляет 500 м, а на расстоянии 10 км - 1000 м.
Следовательно, на основании моментов прохождения каждого ближайшего пункта в точках измерения O1-О4 и расстояния между этими точками измерения можно рассчитать среднюю горизонтальную скорость самолета. Кроме того, момент прохождения ближайшего пункта в каждой точке измерения шума можно с высокой точностью предполагать по расстоянию между точкой измерения О и точками, ортогональными с маршрутом полета из данной точки измерения шума. Взяв за основу данные моменты, из данных измерения шума, представляющих вместе сложную форму волны, можно делать точные извлечения уровня шума с самолета.
В данном примере расстояние между концом взлетно-посадочной полосы Z-O1-О2-О3-О4 составляло соответственно 4087, 2092, 2659 и 1996 м. Оценочная, согласно базе данных, продолжительность полета самолета между точками Z-O1 равна около 66 секунд. На участках O1-О2-О3-О4 фактическое измеренное время равно 21, 24 и 23 секунды. Средняя горизонтальная скорость на соответствующих участках вычисляется как 60, 99,6, 110,8 и 88,8 м/с. На основании этого можно практически точно рассчитать момент прохождения ближайшего пункта самолетом находящихся в их промежуточном положении каждой из точек измерения шума S1-S5.
Наряду с этим, в упомянутом случае, если сложить данные об угле возвышения и о направлении на азимут прибытия радиосигналов для измерения высоты относительно земли в момент прохождении ближайшего пункта в каждой из точек измерения O1-О2-О3-O4 с данными о типе самолета и его сигнале о высоте, получаемых в произвольной точке при приеме ответного сигнала транспондера, то можно в каждой точке измерения определять положение самолета и направление его полета. Также, суммируя и обрабатывая эти данные из каждой точки измерения в вычислительном центре, можно точно рассчитать курс самолета. Таким путем получают материалы для надежного управления полетом самолета и материалы для принятия мер в связи с создаваемым самолетами шумом.
Пример 3
На фиг.12 даны фотографические данные в практическом примере для метода фотографирования в момент прохождения ближайшего пункта: изменения уровня напряженности электрического поля радиосигналов измерения высоты относительно земли с помощью антенн для приема сигналов, направленных вверх в данной точке, вводятся в компьютер и регистрируются компьютером. В тех же точках измерения установили направленную вверх фотокамеру с определенным углом охвата. С этим сконструирована фотокамера так, чтобы включали ее в момент прохождения ближайшего пункта, по достижении установленной величины напряженности электрического поля в процессе его роста. Такой способ фотографирования при прохождении ближайшего пункта можно эффективно использовать на практике.
Такие фотографии взлетающих и садящихся самолетов, выполняемые видеокамерой с интервалом в 1/30 секунды в точках измерения под авиатрассой на расстоянии 7 км севернее от северного конца взлетно-посадочной полосы аэропорта Нарита, были обработаны во временном ряду. Если взять изображения 7 самолетов, сфотографированных 12 сентября 2000 года с 13 часов 20 минут до 13 часов 56 минут, то каждый из них пролетает воздушное пространство с чуть западной стороны над точкой измерения, можно по его форме и размерам дать оценку его типа, направления и скорости полета. То есть данный способ является точным средством регистрации пролетающих самолетов.
Возможность применения на практике в промышленной области
Согласно данному изобретению момент прохождения ближайшего пункта пролетающим в воздушном пространстве самолетом измеряется после приема направляемых самолетом вниз радиосигналов измерения высоты относительно земли, ввода и регистрации данных о колебаниях уровня напряженности их электрического поля. Поэтому по сравнению с общепринятым способом измерения величины шума и напряженности электрического поля ответного сигнала транспондера можно получать более точные и надежные результаты. В частности, даже в случае высокой частоты движения самолетов, когда при общепринятом способе точность резко падает или измерения вообще выполнять невозможно, предлагаемым способом можно выполнять точные измерения момента прохождения ближайшего пункта отдельно для каждого самолета.
На основе такого точного времени прохождения ближайшего пункта, если регулировать характеристики напряженности нескольких антенн для приема радиосигналов измерения высоты относительно земли, то можно проверять состояние полета самолета. А, совмещенное использование методов измерения и анализа ответных сигналов транспондера, может повысить точность различных, касающихся самолета, измерений. Если разместить на земле подобные точки измерения в несколько пунктах, а при необходимости, между ними распределять точки для измерения шума, и получаемые результаты направлять в вычислительный центр, то можно получать основные данные для надежного управления полетом самолета, как его курсом и т.д. или базовые данные для принятия мер по борьбе с шумом от самолетов в установленных пунктах.
Данный способ можно также использовать в качестве эффективного средства оповещения о входящих подозрительных летательных аппаратах, летающих не принятым курсом и на малой высоте без подчинения приказам командно-диспетчерского пункта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОРАКЕТЫ | 2021 |
|
RU2814291C2 |
| СПОСОБ ОРГАНИЗАЦИИ АВИАЦИОННОЙ РАДИОСВЯЗИ ЗА ПРЕДЕЛАМИ ПРЯМОЙ ВИДИМОСТИ | 2006 |
|
RU2342786C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| Способ определения пространственных координат центров проектирования аэрофотоснимков | 1990 |
|
SU1739196A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОЙ ДИНАМИЧЕСКОЙ РАДИОФИЗИЧЕСКОЙ СЦЕНЫ, В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2386143C2 |
| Способ и устройство контроля за положением глиссады и координатами самолёта в дальней зоне | 2018 |
|
RU2692079C1 |
| СПОСОБ ПОСАДКИ САМОЛЕТОВ | 2005 |
|
RU2296372C2 |
| СПОСОБ И СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2020 |
|
RU2744672C1 |
Группа изобретений относится к области регулирования движения для воздушного транспорта. В каждом из технических решений группы принимают радиоволны для измерения высоты относительно земли, излучаемые вниз пролетающим самолетом. Далее вводят и регистрируют в компьютере данные о колебаниях уровня напряженности электрического поля таких радиоволн. Момент прохождения ближайшего пункта определяют на основе времени возникновения их четко выраженных пиков независимо от частоты движения. Предложенные способы характеризуются повышенной точностью. 4 н. и 4 з.п. ф-лы. 12 ил., 2 табл.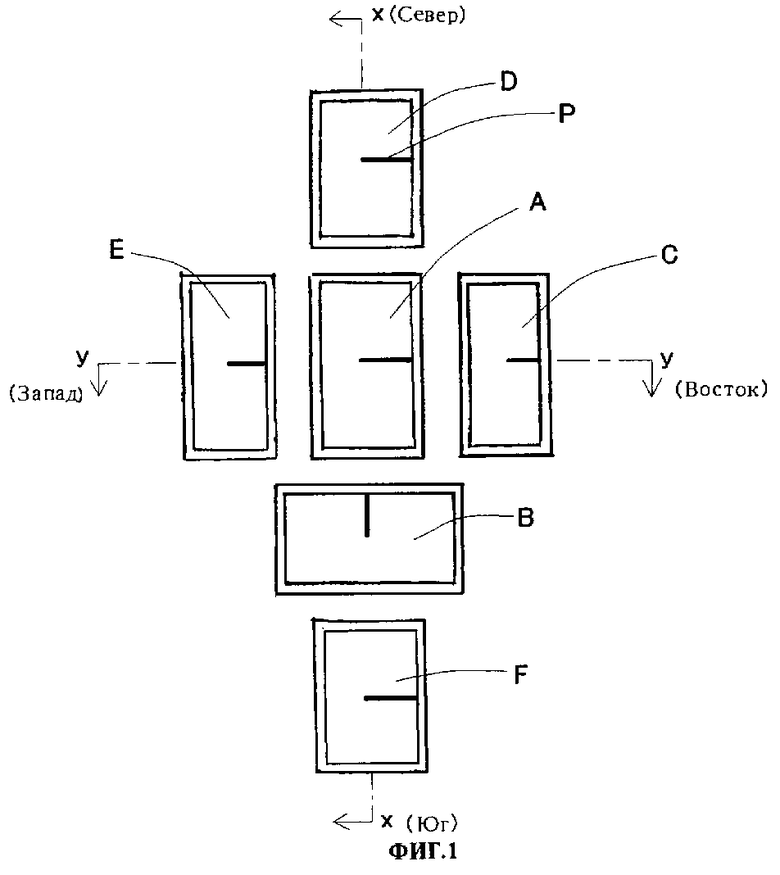
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 4179697 A, 18.12.1979 | |||
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ | 1999 |
|
RU2150752C1 |

