Область техники, к которой относится изобретение
Изобретение относится к радиотехнике и может использоваться в системах инструментального обеспечения захода самолетов на посадку формата ILS и формата ПРМГ. Курсо-глиссадные радиомаяки (КРМ и ГРМ) метрового диапазона длин волн, входящие в упомянутую систему ILS, и КРМ и ГРМ дециметрового диапазона длин волн, входящие в посадочную радиомаячную группу (ПРМГ), формируют в зоне захода самолетов на посадку глиссаду, предназначенную для управления самолетом в горизонтальной и вертикальной плоскостях. Способ и устройство в соответствии с настоящим изобретением позволяет обеспечить контроль за положением глиссады и координатами самолета в момент пролета над контрольной точкой, расположенной на продолжении оси взлетно-посадочной полосы, вдали от ее порога.
Уровень техники
Основным средством обеспечения инструментального захода самолетов гражданской авиации на посадку и посадки являются радиомаячные системы посадки (СП) метрового диапазона длин волн (MB) формата ILS (Instrument Landing System). Для обеспечения инструментального захода самолетов государственной авиации на посадку и посадки являются радиомаячные системы СП дециметрового диапазона длин волн (ДЦВ) формата ПРМГ. Радиомаячные системы посадки MB имеют почти вековую историю развития. История развития СП в США описана в [Watts, С.В., Jr. Instrument Landing Scrapbook / С.В., Jr. Watts. - Trafford Publishing, 2005. 392 p.p.]. Основные вехи развития СП MB для гражданской авиации и СП для государственной авиации в нашей стране освещены в [НИИ-33 / ВНИИРА. История становления и развития Всесоюзного НИИ радиоаппаратуры - СПб.: 2007. - 291 с.].
Принцип работы курсового и глиссадного радиомаяков описаны в книге [Г.А. Пахолков, В.В. Кашинов и др. "Угломерные радиотехнические системы посадки". - М.: Транспорт. - 1982]. Радиомаячная группа ПРМГ-76УМ выпускается АО "Челябинский радиозавод "Полет". ПРМГ-76УМ эксплуатируется на аэродромах государственной авиации и на аэродромах совместного базирования гражданской и государственной авиации.
Радиомаячная СП включает в себя курсовой ОВЧ-радиомаяк (КРМ), глиссадный ОВЧ-радиомаяк (ГРМ), маркерные ОВЧ-радиомаяки или дальномерное оборудование (DME).
Курсовой радиомаяк (КРМ) MB и КРМ ДЦВ устанавливают на продолжении оси взлетно-посадочной полосы (ВПП), на стороне, противоположной стороне захода самолета на посадку (на расстоянии от 400 до 1150 м от торца ВПП). Антенна КРМ излучает в окружающее пространство электромагнитные волны в диапазоне частот от 108 до 111,975 МГц, модулированные по амплитуде сигналами тональных частот ƒ1=90 Гц и ƒ2=150 Гц. В идеальном случае поверхность, на которой разность глубин модуляции (РГМ) сигналами ƒ1 и ƒ2 равна нулю, представляет собой вертикальную плоскость, проходящую через ось ВПП. Справа от поверхности курса (по направлению захода самолета) преобладает сигнал с глубиной модуляции несущей тональной частотой 150 Гц, а слева - сигнал с глубиной модуляции несущей тональной частотой 90 Гц.
ГРМ MB и ДЦВ устанавливают в точке, расположенной на расстоянии от 200 до 400 м от порога взлетно-посадочной полосы (ВПП) и на удалении 120-180 м от оси ВПП. Антенна ГРМ MB излучает в окружающее пространство электромагнитные волны в диапазоне частот 328-335 МГц, модулированные по амплитуде сигналами тональных частот ƒ1=90 Гц, ƒ2=150 Гц. Поверхность, на которой разность глубин модуляции (РГМ) сигналами ƒ1 и ƒ2 равна нулю, называют поверхностью глиссады.
Линию пересечения поверхности глиссады с вертикальной плоскостью, формируемой КРМ и проходящей через ось взлетно-посадочной полосы, называют глиссадой.
В соответствии с рекомендацией ИКАО [пункт 3.1.5.1.2 в Приложении 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Том 1. Радионавигационные средства. ИКАО, Монреаль (Канада), 2006. - 606 с.], угол наклона глиссады θгл должен быть равен 3°. Угол наклона глиссады θгл относительно горизонтальной плоскости устанавливается и выдерживается в следующих пределах (пункт 3.1.5.1.2.1 в упомянутом Приложении 10):
a) 0,075 θгл для глиссады ILS категорий I и II;
b) 0.04 θгл для глиссады ILS категории III.
КРМ системы ПРМГ излучает сигналы в диапазоне 905,1-932,4 МГц, ГРМ - диапазоне 939,6-966,9 МГц. Высокочастотный сигнал, модулирован сигналом в форме "меандр" с частотой 2100 Гц в течение одного полупериода колебаний с частотой 12,5 Гц; противофазный с ним сигнал, модулирован "меандром " с частотой 1300 Гц в течение другого полупериода колебаний с частотой 12,5 Гц. Подробно работа радиомаяков ПРМГ описана в патенте RU 2 619 071 Глиссадный радиомаяк для захода на посадку по крутой траектории (варианты) по заявке 2016115278 от 19.04.2016 авторов Войтовича Н.И., Жданова Б.В.
Бортовые приемники снижающегося самолета принимают сигналы курсового и глиссадного радиомаяков (КРМ и ГРМ), выделяют информационные параметры в этих сигналах:
- разности глубин модуляции тонами 90 и 150 Гц (РГМк и РГМг в сигналах КРМ MB и ГРМ MB, соответственно)
- коэффициент разнослышимости сигналов 1300 и 2100 Гц (КРСК и КРСГ в сигналах КРМ ДЦВ и ГРМ ДЦВ, соответственно),
величины которых индицируются на пилотажных приборах, показывая отклонение самолета от плоскости курса и поверхности глиссады.
При этом существуют две взаимосвязанные проблемы.
Первая проблема: отсутствие информации об истинном положении глиссады в зоне действия радиомаяков в период между летными проверками ГРМ. Глиссаду измеряют летным путем при вводе ГРМ в эксплуатацию, угол глиссады корректируют при плановых летных проверках систем посадки, выполняемых 1-2 раза в год. В период между летными проверками контроль за положением плоскостей курса и глиссады выполняют контрольные устройства, расположенные в ближней зоне маяков. Кроме того, в системах ILS 3-ей категории для КРМ имеется возможность использовать систему дальнего контроля, размещаемую на удалении 4-6 км от КРМ, и обеспечивающую диспетчера посадки информацией о положении плоскости курса. При этом дополнительно с величинами РГМ измеряют и контролируют суммарную величину модуляции (СГМ). Нахождение СГМ в оговоренных пределах является показателем «правильности» работы маяков. Необходимость такого контроля для систем 3-ей категории оговорена нормами ИКАО. Для ГРМ системы дальнего контроля не существует, так как высокие мачты с контрольными антеннами на высоте глиссады в зоне действия ГРМ являлись бы летным препятствием и поэтому недопустимы для установки на аэродроме. Проблема в части контроля ГРМ усугубляется принятым способом формирования глиссады. Как известно, глиссада формируется с участием радиоволн, отраженных от подстилающей поверхности. При этом угол глиссады задается высотой подвеса излучающих элементов глиссадной антенной решетки относительно подстилающей поверхности. Изменение высоты снежного покрова на земной поверхности при выпадении или таянии снега приводит к неконтролируемым изменениям угла глиссады, что снижает безопасность захода на посадку по сигналам ILS или ПРМГ. В этой ситуации, весьма полезной для диспетчера посадки была бы информация об истинном положении глиссады в зоне действия системы посадки в период между летными проверками ГРМ.
ГРМ имеет собственную систему выносного контроля глиссады. Однако, антенна выносного контроля ГРМ располагается на удалении 60-114 метров от передающих антенн маяка, в то время как продольный размер зоны формирования отраженного поля на подстилающей поверхности (размер первой зоны Френеля) составляет от 300 (для ПРМГ) до 700 м (для ILS). Поэтому показания системы существующего выносного контроля ГРМ не дают информации о истинном положении глиссады в зоне действия ГРМ.
Под дальней зоной ГРМ мы понимаем здесь область пространства, в которой выполняется условие: разность хода лучей от верхнего излучающего элемента антенной решетки и его зеркального отображения относительно подстилающей поверхности должна быть под углом глиссады не менее 0,495 длины волны. Область, расположенная дальше БПРМ, при любом угле глиссады может рассматриваться как дальняя зона.
Вторая проблема: отсутствие у контролирующих служб (диспетчера посадки) информации о координатах заходящего на посадку самолетов. Ранее такую информацию можно было получать от радиолокационных систем посадки. Однако в настоящее время от радиолокационных систем посадки отказались (они не обеспечивают требуемую точность измерения координат). Отсутствие информации об отклонениях самолета от глиссады практически исключает возможность диспетчера посадки корректировать (при необходимости) заход самолета на посадку.
Настоящее изобретение позволяет разрешить эти две проблемы и тем самым повысить безопасность выполнения захода на посадку и посадки самолета по сигналам ILS или ПРМГ.
Настоящее изобретение не имеет аналогов, не имеет прототипа.
Раскрытие изобретения
Технический результат изобретения направлен на повышение безопасности захода самолета на посадку по сигналам ILS или ПРМГ. Рассмотрим достижение технического результате на примере работы с системой посадки формата ILS.
Работа с системой посадки формата ПРМГ аналогична. Технический результат достигается тем, что в точке дальнего контроля, расположенной на земной поверхности на продолжении ВПП со стороны захода самолета на посадку, вводят в память вычислителя значения установленных на курсовом и глиссадном радиомаяках значения линейной крутизны курса и глиссады, соответственно, принимают сигналы курсового и глиссадного радиомаяков (КРМ и ГРМ), отраженные снижающимся самолетом, измеряют информационные параметры курса и глиссады-разности глубин модуляции (РГМк, РГМг, СГМк и СГМг, соответственно), измеряют расстояние от точки контроля до пролетающего над ней самолета, вычисляют боковое смещение пролетающего самолета относительно плоскости курса, вычисляют его высоту над точкой контроля и высоту точки глиссады над точкой контроля. Измеренные и вычисленные величины передают через линию связи на командно- диспетчерский пункт аэродрома, где отображают на дисплее диспетчера.
При этом диспетчер аэродрома получает информацию не только о положении самолета, но и контролирует положение глиссады ILS в зоне ее действия (дальний контроль глиссады). В качестве точки контроля выбирается позиция на продолжении оси ВПП. В плоскости, проходящей через точку контроля перпендикулярно к оси ВПП, известны крутизны курса и глиссады Sк и Sг, соответственно, имеющие размерность [РГМ/м]. Эти значения устанавливаются при настройке маяков и, как правило, мало изменяются при эксплуатации. Кроме измерения отраженных сигналов посадки требуется измерение расстояния R между точкой контроля и пролетающим над ней самолетом. Поперечное смещение пролетающего самолета относительно плоскости курса в точке контроля вычисляют как частное от деления измеренной в принятом сигнале разности глубин модуляции сигнала курсового радиомаяка на установленное в курсовом маяке значение линейной крутизны курса; высоту самолета, пролетающего над точкой контроля, вычисляют как корень квадратный из разности квадрата расстояния и квадрата упомянутого поперечного смещения; высоту точки на глиссаде вычисляют как сумму упомянутой высоты самолета над точкой контроля, и частного от деления измеренной в принятом сигнале разности глубин модуляции сигнала глиссадного радиомаяка на установленное в глиссадном радиомаяке значение линейной крутизны глиссады.
Таким образом, технический результат обусловлен тем, что диспетчер получает дополнительную информацию о координатах снижающегося самолета и информацию о положении глиссады и в случае отклонения от глиссады выше допуска, диспетчер дает указание либо по корректировке полета самолета, либо об уходе самолета на второй круг. Эти действия диспетчера предотвращают аварийную ситуацию при заходе самолета на посадку и посадке самолета. Информация о высоте точки на глиссаде используется для принятия мер по поддержанию глиссады в заданных пределах. Реализация предложенных технических решений повышает безопасность полетов самолетов на этапах захода на посадку и посадки самолета.
Для реализации предложенного способа применяют устройство контроля за положением глиссады и координатами самолета в дальней зоне, содержащее приемную антенну сигналов КРМ, приемную антенну сигналов ГРМ, приемник-измеритель информационного параметра сигналов КРМ с первым и вторым выходами, приемник-измеритель информационного параметра сигналов ГРМ с первым и вторым выходами, вычислитель с тремя входами и одним выходом, дальномерное устройство, линию связи с первым, вторым и третьим входом и выходом и дисплей, при этом при этом приемная антенна сигналов глиссадного радиомаяков последовательно соединена с входом приемника - измерителя информационного параметра сигналов глиссадного радиомаяков и через его первый выход с первым входом вычислителя, приемная антенна сигналов курсового радиомаяка последовательно соединена с входом приемника - измерителя информационного параметра сигналов курсового радиомаяка и через его первый выход со вторым входом вычислителя, второй выход приемника-измерителя сигналов глиссадного радиомаяка соединен с первым входом линии связи, второй выход приемника-измерителя сигналов курсового радиомаяка соединен со вторым входом линии связи, приемо-передающая антенна дальномерного устройства последовательно соединена с дальномерным устройством и с третьим входом вычислителя, выход которого последовательно соединен с третьим входом линии связи и через выход линии связи с дисплеем, расположенным на командно-диспетчерском пункте аэродрома, причем в качестве точки контроля выбирают позицию на продолжении оси взлетно-посадочной полосы.
Решение задачи контроля за положением глиссады и координатами самолета в дальней зоне поясняется далее текстом и рисунками на фигурах.
Краткое описание чертежей
На фиг. 1 приведена схема взаимного расположения взлетно-посадочной полосы, курсового радиомаяка, глиссадного радиомаяка и устройства контроля координат снижающегося самолета и положения глиссады (далее устройство контроля).
На фиг. 1 приняты обозначения:
1- взлетно-посадочная полоса,
2- курсовой радиомаяк,
3- глиссадный радиомаяк,
4- устройство контроля за положением глиссады и координатами самолета в дальней зоне (устройство контроля),
5- самолет, заходящий на посадку; стрелками показаны направления распространения радиоволн, отраженных (рассеянных) самолетом.
На фиг. 2 представлена схема устройства контроля за положением глиссады и координатами самолета в дальней зоне по настоящему изобретению.
На фиг. 2 приняты обозначения:
6 - приемная антенна отраженных сигналов ГРМ;
7 - приемная антенна отраженных сигналов КРМ;
8 - приемо-передающая антенна дальномерного устройства;
9 - приемник - измеритель сигналов ILS ГРМ;
10 - приемник - измеритель сигналов ILS КРМ;
11 - дальномерное устройство;
12 - вычислитель;
13 - канал связи;
14 - дисплей диспетчера.
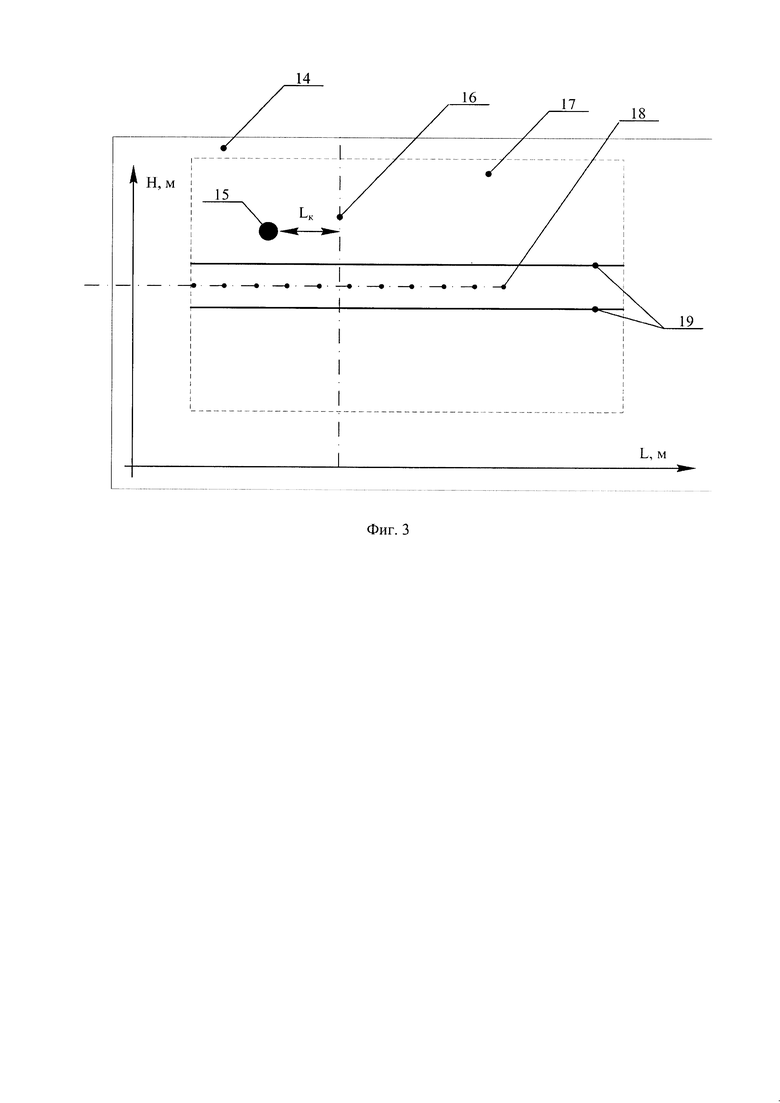
На фиг. 3 показан экран дисплея диспетчера 14.
На фиг. 3 приняты дополнительно обозначения:
15 - отметка положения самолета,
16 - линия, отображающая номинальное положение плоскости курса,
17 -поле допуска положения самолета при его пролете над устройством контроля,
(граница поля допуска обозначена пунктирной линией);
18 - координатная линия, соответствующая высоте точки на глиссаде,
19 - координатные линии допуска по высоте точки на глиссаде над устройством контроля.
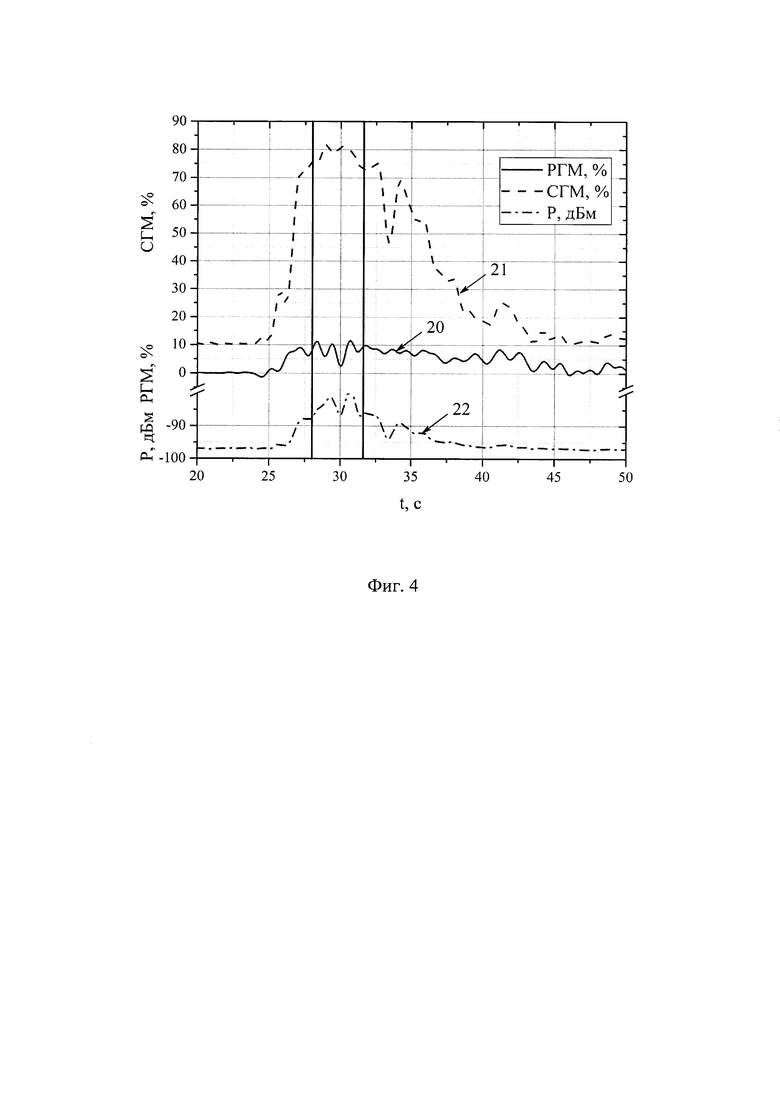
На фиг. 4 приведены примеры экспериментальной записи параметров сигналов ГРМ ILS, полученные при пролете самолетов в контрольной точке, расположенной в районе дальнего приводного радиомаяка (ДПРМ).
На фиг. 4 приняты обозначения:
20 - сигнал разности глубин модуляции (РГМ),
21- сигнал суммы глубин модуляции (СГМ),
22 - сигнал мощности принятого сигнала (Р в дБ по отношению к одному милливатту).
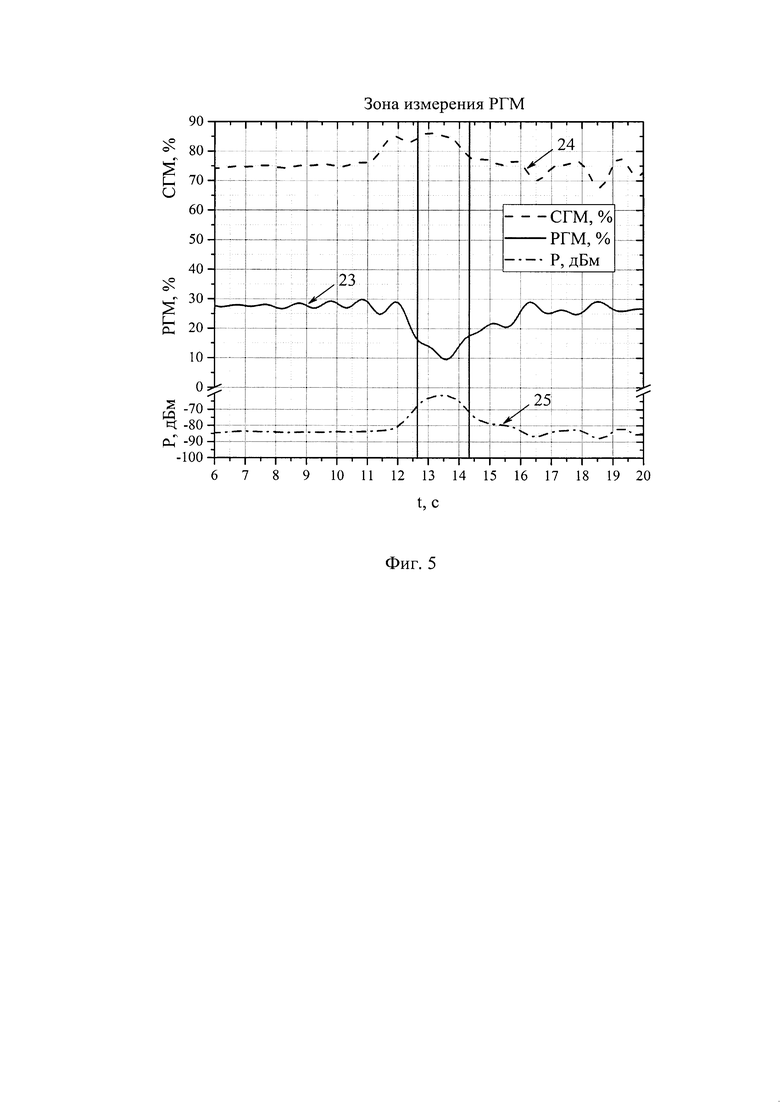
На фиг. 5 приведены примеры экспериментальной записи параметров сигналов ГРМ ILS, полученные при пролете самолетов в контрольной точке, расположенной в районе ближнего приводного радиомаяка (БПРМ).
На фиг. 5 приняты обозначения:
23 - сигнал разности глубин модуляции (РГМ),
24- сигнал суммы глубин модуляции (СГМ),
25 - сигнал мощности принятого сигнала (Р в дБ по отношению к одному милливатту).
Осуществление изобретения
Устройство контроля за положением глиссады и координатами самолета в дальней зоне (далее, устройство контроля) по настоящему изобретению расположено относительно ВПП в соответствии со схемой, показанной на фиг. 1.
Устройство контроля (фиг. 2), содержит приемную антенну 6 сигналов ГРМ, приемную антенну 7 сигналов КРМ, приемо-передающую антенну 8 дальномерного устройства, приемник - измеритель 9 сигналов ГРМ с первым 91 и вторым 92 выходом, приемник - измеритель 10 сигналов КРМ с первым 101 и вторым 102 выходом, дальномерное устройство 11, вычислитель 12 с первым 121, вторым 122 и третьим 123 входами и одним выходом 124, канал связи 13 с КДП, содержащий первый 131, второй 132 и третий 133 входы и выход 134, соединенный с дисплеем 14 диспетчера посадки самолетов.
Для осуществления данного изобретения в качестве приемных антенн сигналов ILS КРМ и ГРМ (позиции 6 и 7 на фиг. 2), отраженных самолетом, можно использовать излучающие элементы передающих антенных решеток КРМ и ГРМ. В качестве приемников - измерителей параметров сигналов посадки (позиция 9 и 10 на фиг. 2) можно использовать приемники-измерители (анализаторы) сигналов ILS, выпускаемые в России или за рубежом: КСП-80, АСПН-1, EVS-300 и др. В качестве дальномерного устройства 11 можно использовать серийные радиовысотомеры, например, радиовысотомер А-065А, выпускаемый АО «УПКБ Деталь». В качестве линии связи 13 может использоваться или физическая линия связи или радиоканал. В качестве дисплея 14 диспетчера посадки может использоваться дисплей ПЭВМ. Вычислитель 12 может быть построен на основе отечественных цифровых устройств.
Упомянутые устройства соединены между собой следующим образом. Приемная антенна 6 сигналов ГРМ последовательно соединена с входом приемника - измерителя 9 информационного параметра сигналов ГРМ и через его первый 91 выход с первым 121 входом вычислителя 12, приемная антенна 7 сигналов курсового радиомаяка последовательно соединена с входом приемника - измерителя информационного параметра сигналов курсового радиомаяка и через его первый 101 выход со вторым входом 122 вычислителя, второй выход 92 приемника-измерителя 9 сигналов глиссадного радиомаяка соединен с первым входом 131 линии связи 13, второй выход 102 приемника-измерителя 10 сигналов КРМ соединен со вторым 132 входом линии связи 13, приемо-передающая антенна 8 дальномерного устройства последовательно соединена с дальномерным устройством 11 и с третьим 123 входом вычислителя 12, выход которого 124 последовательно соединен с третьим 133 входом линии связи 13 и через выход 134 линии связи 13 с дисплеем 14, расположенным на командно-диспетчерском пункте аэродрома.
При этом в качестве точки контроля выбирают позицию на продолжении оси ВПП, например, на ближнем или дальнем приводном радиомаяке (БПРМ или ДПРМ). БПРМ удален от торца ВПП на расстояние 1 км. ДПРМ, как правило, удален от торца ВПП на расстояние 4 км. БПРМ и ДПРМ имеют охраняемые участки с электропитанием и линиями связи с КДП.
Приемные антенны 6, 7 сигналов ГРМ и КРМ, соответственно, и антенна 8 приемно-передающего дальномерного устройства 11 ориентированы максимумами диаграмм направленности (ДН) вверх для приема сигналов, отраженных самолетом. Для исключения приема сигналов посадки, распространяющихся вдоль земной поверхности, ДН приемных антенн сигналов КРМ и ГРМ имеют малый уровень в направлении на радиомаяки.
Устройство контроля работает следующим образом. Принятые антеннами 6 и 7 сигналы, отраженные самолетом, усиливаются приемниками - измерителями информационного параметра сигналов 9 ГРМ и 10 КРМ, соответственно. В принятых и усиленных сигналах измеряют величины информационных параметров - разность глубин модуляции сигнала ГРМ тоновыми сигналами 90 и 150 Гц (РГМг) и разность глубин модуляции сигнала КРМ тоновыми сигналами 90 и 150 Гц (РГМк), также измеряют величину суммарной глубины модуляции в сигнале ГРМ - СГМг и величину суммарной глубины модуляции в сигнале КРМ - СГМк. Величины РГМг и РГМк поступают на первый 121 и второй 122 входы вычислителя 12. Дальномерное устройство 11 с помощью приемо-передающей антенны 8 излучает и принимает отраженные сигналы от самолета при его пролете над точкой контроля. Далее в дальномерном устройстве 11 вычисляется расстояние между точкой контроля и пролетающим над ней самолетом. Значение этого расстояния R поступает на третий вход 123 вычислителя 12. В вычислитель 12 заранее введены значения линейной крутизны курса и глиссады - Sк и Sг, соответственно, по данным ввода радиомаяков в эксплуатацию. Эти величины достаточно стабильны в процессе эксплуатации маяков. Sк и Sг уточняют и корректируют при выполнении очередных летных проверках радиомаяков. Во время летных проверок устанавливают угловые значения крутизны курса и глиссады - Sуг (курса) и Sуг (глиссады), имеющие размерность [РГМ/ градус]. Пересчет угловых значений крутизны курса и глиссады в линейные отклонения от плоскости курса Sк и от поверхности глиссады Sг выполняют по формуле:
где: Dк - расстояние между КРМ и точкой контроля;
Dг - расстояние между ГРМ и точкой контроля.
Значения линейных Sк и Sг вводят в вычислитель 12. Значения линейных Sк и Sг корректируются при проведении летных проверок. Далее вычислитель 12 производит вычисление декартовых-координат L и Нг самолета при его пролете над точкой контроля по следующим формулам:
Координаты самолета L, Нс, Нс, высота линии глиссады и измеренные величины РГМк, РГМг,СГМк и СГМг передаются по каналу связи 13 диспетчеру на КДП и отображаются на дисплее 14.
Если разместить точку контроля в зоне ДПРМ, то диспетчер может по полученным показаниям: смещению самолета относительно плоскости курса и высоте самолета при необходимости передать команды пилоту о корректировке траектории снижения или отправить его на «второй круг». Кроме того, диспетчер может осуществлять дополнительный контроль положения линии глиссады (аналог дальнего контроля КРМ) и при выявлении недопустимых отклонений глиссады от заданной высоты отключить ГРМ, о чем извещают командиров всех воздушных судов, следующих на данный аэродром.
Кроме контроля координат снижающегося самолета, предложенный способ можно использовать для организации «дальнего контроля глиссады», аналогично дальнему контролю курса. Эти объективные данные о положении глиссады в зоне действия ГРМ позволят диспетчерам и пилотам, выполняющих заход на посадку по системе ILS, повысить степень доверия к предоставляемой данной системой информации о положении самолета относительно заданной траектории посадки.
Был проведен эксперимент по приему радиоволн, отраженных снижающимся самолетом ТУ-134, по измерению РГМ, СГМ и мощности принятого сигнала. В качестве приемной антенны сигналов ГРМ была использована резонаторная антенна [патент РФ №2564953], применяемая в качестве излучающего элемента антенной решетки опытного образца глиссадного радиомаяка [Бухарин В.А., Войтович Н.И. Фазовые характеристики плоской резонаторной антенны. 27-я Международная Крымская конференция «СВЧ техника и телекоммуникационные технологии» (КрыМиКо'2017). Севастополь, 5-11 ноября. 2017 г.: материалы конф. В 8 т. - Москва; Минск; Севастополь, 2017. С. 710-716]; [Войтович Н.И., Жданов Б.В Глиссадный радиомаяк для аэродромов с высоким уровнем снежного покрова 27-я Международная Крымская конференция «СВЧ-техника и телекоммуникационные технологии» (КрыМиКо'2017). Севастополь, 5-11 ноября. 2017 г.: материалы конф. В 8 т. - Москва; Минск; Севастополь, 2017, С. 433-439]. В качестве приемника - измерителя сигналов ILS использовался анализатор сигналов ILS «Normarc 7710». На фиг. 4 представлен пример записи параметров сигналов ГРМ: РГМ, СГМ и мощности принятого сигнала в точке контроля, расположенной в районе ДПРМ, на удалении от торца ВПП - 4300 м.
На фиг. 5 представлен пример записи упомянутых параметров сигналов ГРМ в точке контроля, расположенной в районе БПРМ, на удалении от торца ВПП - 1000 м. Вертикальными линиями на фиг. 4 и фиг. 5 выделены зоны измерения РГМ, в пределах которых величина СГМ была близка заданной - 80%. Значения РГМ показывают, что самолеты над точкой контроля снижались ниже глиссады. Если к этим данным добавить высоту (не измерялась) пролетающих самолетов, то можно было бы определить высоту глиссады в точках контроля.
Проведенный эксперимент показал реализуемость способа и устройства по настоящему изобретению.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и радиомаяк системы инструментальной посадки с функцией проверки и калибровки бортовых приемников воздушных судов (варианты) | 2023 |
|
RU2816376C1 |
| СПОСОБ РЕГУЛИРОВКИ ИНФОРМАЦИОННОГО ПАРАМЕТРА КУРСО-ГЛИССАДНЫХ РАДИОМАЯКОВ И УСТРОЙСТВА ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2017 |
|
RU2695316C2 |
| Способ и устройство контроля за отклонением снижающегося самолета от оси взлетно-посадочной полосы | 2019 |
|
RU2725891C1 |
| Глиссадный радиомаяк | 2023 |
|
RU2818668C1 |
| ГЛИССАДНЫЙ РАДИОМАЯК ДЛЯ ЗАХОДА НА ПОСАДКУ ПО КРУТОЙ ТРАЕКТОРИИ (ВАРИАНТЫ) | 2016 |
|
RU2619071C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| ДВУХЧАСТОТНЫЙ ГЛИССАДНЫЙ РАДИОМАЯК | 2016 |
|
RU2624263C1 |
| Глиссадный радиомаяк | 2018 |
|
RU2693024C1 |
| ГЛИССАДНЫЙ РАДИОМАЯК (ВАРИАНТЫ) | 2009 |
|
RU2429499C2 |
| ДВУХЧАСТОТНЫЙ КУРСОВОЙ РАДИОМАЯК (ВАРИАНТЫ) | 2013 |
|
RU2543083C1 |
Изобретение относится к радиотехнике и может быть использовано в системах инструментального обеспечения захода самолетов на посадку. Достигаемый технический результат - повышение безопасности захода самолета на посадку. Указанный результат достигается за счет того, что в точке дальнего контроля, расположенной на земной поверхности на продолжении оси взлетно-посадочной полосы со стороны захода самолета на посадку, принимают сигналы курсового и глиссадного радиомаяков, отраженные снижающимся самолетом, приемником-измерителем сигналов глиссадного (курсового) радиомаяка измеряют разность глубин модуляции, дальномером измеряют расстояние от точки контроля до пролетающего над ней самолета, с помощью вычислителя вычисляют боковое смещение пролетающего самолета относительно плоскости курса, а также высоту самолета над точкой контроля и высоту точки глиссады над точкой контроля. Измеренные и вычисленные упомянутые величины передают по линии связи на командно-диспетчерский пункт аэродрома. При этом диспетчер аэродрома получает информацию не только о положении самолета над точкой контроля, но и контролирует положение глиссады в зоне ее действия. 2 н.п. ф-лы, 5 ил.
1. Способ контроля за положением глиссады и координатами самолета в дальней зоне, характеризующийся тем, что вводят в память вычислителя значения установленных на курсовом и глиссадном радиомаяках значения линейной крутизны курса и глиссады, соответственно в точке контроля принимают отраженные от снижающегося самолета сигналы курсового и глиссадного радиомаяков системы посадки самолетов, измеряют в принятых сигналах разность глубин модуляции сигнала курсового радиомаяка и разность глубин модуляции сигнала глиссадного радиомаяка, измеряют расстояние от точки контроля до самолета, пролетающего над точкой контроля, вычисляют поперечное смещение пролетающего самолета относительно плоскости курса, а также высоту самолета над точкой контроля и высоту точки на глиссаде над точкой контроля, упомянутые измеренные и вычисленные величины передают на командно-диспетчерский пункт аэродрома, при этом точку контроля располагают на продолжении оси взлетно-посадочной полосы со стороны захода самолета на посадку; поперечное смещение пролетающего самолета относительно плоскости курса в точке контроля вычисляют как частное от деления измеренной в принятом сигнале разности глубин модуляции сигнала курсового радиомаяка на установленное в курсовом радиомаяке значение линейной крутизны курса; высоту самолета, пролетающего над точкой контроля, вычисляют как корень квадратный из разности квадрата расстояния и квадрата упомянутого поперечного смещения; высоту точки на глиссаде вычисляют как сумму упомянутой высоты самолета над точкой контроля и частного от деления измеренной в принятом сигнале разности глубин модуляции сигнала глиссадного радиомаяка на установленное в глиссадном радиомаяке значение линейной крутизны глиссады.
2. Устройство контроля за положением глиссады и координатами самолета в дальней зоне, содержащее приемную антенну сигналов глиссадного радиомаяка, приемную антенну сигналов курсового радиомаяка, приемо-передающую антенну дальномерного устройства, приемник-измеритель сигналов глиссадного радиомаяков с первым и вторым выходами, приемник-измеритель сигналов курсового радиомаяка с первым и вторым выходами, дальномерное устройство, вычислитель с первым, вторым и третьим входами и одним выходом, канал связи с контрольно-диспетчерским пунктом с первым, вторым и третьим входами и одним выходом, дисплей диспетчера посадки самолетов, при этом приемная антенна сигналов глиссадного радиомаяка последовательно соединена с входом приемника-измерителя информационного параметра сигналов глиссадного радиомаяка и через его первый выход - с первым входом вычислителя, приемная антенна сигналов курсового радиомаяка последовательно соединена с входом приемника-измерителя информационного параметра сигналов курсового радиомаяка и через его первый выход - со вторым входом вычислителя, второй выход приемника-измерителя сигналов глиссадного радиомаяка соединен с первым входом линии связи, второй выход приемника-измерителя сигналов курсового радиомаяка соединен со вторым входом линии связи, приемо-передающая антенна дальномерного устройства последовательно соединена с дальномерным устройством и с третьим входом вычислителя, выход которого последовательно соединен с третьим входом линии связи и через выход линии связи - с дисплеем, расположенным на командно-диспетчерском пункте аэродрома, причем в качестве точки контроля выбирают позицию на продолжении оси взлетно-посадочной полосы.
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ КОНТРОЛЯ СНИЖЕНИЯ ПРИ ПОСАДКЕ ВОЗДУШНОГО СУДНА В УСЛОВИЯХ ОТСУТСТВИЯ ВИЗУАЛЬНОЙ ВИДИМОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2016 |
|
RU2631264C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| JP 10288655 A, 27.10.1998 | |||
| WO 2009023359 A2, 19.02.2009 | |||
| JP 9197033 A, 31.07.1997 | |||
| US 5250955 A, 05.10.1993. | |||

