Изобретение относится к аэрофототопографии и предназначено для планово-вы- сотной привязки аэрофотоснимков.
Известен способ определения пространственных координат носителя (самолета, вертолета), основанный на измерении с помощью радиогеодезической системы наклонных дальностей от антенн носителя до антенн нескольких наземных станций ответчиков, находящиеся в пунктах с известными планово-высотными координатами. Местоположение антенны носителя определяется обратной пространственной засечкой не менее чем по трем наклонным дальностям с использованием ЭВМ. По результатам анализа точность определения плановых ко ординат при реально достигнутой точности измерения наклонных дальнестей составляет 0, м в зависимости от положения носителя и числа и расположения наземных станций.
Однако ошибка определения высоты значительная и составляет 1,3-51,0 м. Это является основным недостатком указанного способа.
Известен способ, основанный на использовании глобальной спутниковой системы определения местоположений носителя.
Ошибки взаимного положения точек составляют 10-16 м. Точность определения высот небольшая - порядка 30 м. Это также является существенным недостатком дан- ного способа.
Наиболее близким техническим решением к предлагаемому является способ, по которому плановые координаты носителя определяются методом обратной засечки (трилатерации) по измеренным с помощью самолетной радиогеодезической системы и с использованием ЭВМ наклонных дальностей от бортовой антенны до двух или более антенн наземных станций с известными планово-высотными координатами, а высота центров проекций вычисляется по показаниям статоскопа и результатам высотной привязки статоскопа к отсчетной системе высот при вылете из аэропорта.
Этот момент - привязка статоскопа и именно при вылете - является одним из отрицательных факторов, которые влияют на точность измерения высоты.
Высотная привязка показаний стато- скопа к отсчетной системе высот выполняется полевыми геодезическими методами непосредственно перед вылетом из аэропорта, и это требует, во-первых существенных затрат времени на преодоление этих подготовительных работ, во-вторых, не обеспечивает достаточно высокой точности передачи высоты между исходной точкой (в аэропорту) и центрами проектирования. Это обусловлено влиянием вертикальных ускорений и резкого изменения барических условий при наборе высоты носителем.
Цель изобретения - повышение точности высотной привязки статоскопа путем ее выполнения в полете на высоте аэрофотосьемки.
Поставленная цель достигается тем, что согласно способу определения пространственных координат центров проектирования аэрофотоснимков с использованием радио- геодезической системы, включающему установку наземных станций системы в пунктах с известными планово-высотными координатами, определение с помощью бортовой ЭВМ наклонных дальностей от бортовой антенны до антенн наземных станций, высотную привязку показаний статоскопа и вычисления по полученным данным пространственных координат, на одном или более исходных пунктах устанавливают наземные станции, имеющие антенную систему с возможностью горизонтального и вертикального приема и излучения радиосигналов, до начала аэрофотосъемки вводят в ЭВМ плановые координаты и высоту исходного пункта, пользуясь показаниями бортовой ЭВМ, направляют носитель в сторону исходного пункта и в момент пролета на достаточно близком расстоянии от вертикали, проведенной через антенную систему станции, по возникающему сигналу производят высотную привязку показаний статоскопа путем измерения радиогеодезической системой расстояния L между антенной исходной станции с антенной носителя, вычисления расстояния R до указанной вертикали и вычисления высоты Н антенны бортовой станции относительно антенны исходной станции, а во время аэрофотосъ емки осуществляют непрерывную регистрацию показаний статоскопа и наклонных дальностей до наземных станций и вычисление пространственных координат центре проектирования аэрофотоснимков.
Указанные вычисления производят из соотношений
(xc-xH)2+(Yc-YH)2 0)
где хс Yc-плановые координаты носителя:
XH, YH - плановые координаты антенны наземной станции;
Н2 - L2 - R2,(2)
где L - расстояние между антенной исходной станции и антенной носителя;
R - расстояние от носителя до вертикали, проведенной через антенную систему станции;
Н - высота антенны бортовой станции.
Максимально допустимая величина R может быть определена из следующих соображений.
Средняя квадратическая погрешность определения высоты из соотношения (2) равна
m
1 +
2f rtlR у
(3)
где mi и тр - ср.кв. погрешности определения L и R.
Учитывая, что L2 можно записать в виде
Н2 + R2, формулу (3)
пь. УЙ+Л (mt + m& )
Н
а затем получить выражение для максимально допустимого значения радиуса R Ядоп. кН, .(4)
где ;
„ ./тндоп - mj
v Т,
; mft -f mf
где тн доп. - максимально допустимая ср.кв. погрешность определения высоты.
Реально можно получить PIR 2 м, 0,4 м. Если при этом потребовать, чтобы тн доп. 0.5 м при Н 2000 м, то величина К кажется равной К 0,147.
Отсюда при условии обеспечения указанной выше точности определения L и R мож- но ориентировочно принять РДОп. 0,15 Н.(6)
Способ осуществляется следующим образом.
На трех {или более) пунктах с известными планово-высотными координатами устанав- ливают наземные станции радиогеодезической системы, причем антенна системы одной или более станций должны иметь помимо возможности горизонтального также возможность вертикального приема и излу- чения радиосигналов. Антенна носителя имеет направленность, обеспечивающую -;есбходимуго СБЙЗЬ со наземными станциями. Наиболее целесообразно на всех пунктах иметь станции с такими антен- нами. Выбирают наземную станцию, расположенную наиболее близко к участку, которую принимают за исходную.
Перед началом аэрофотосъемки плановые координаты и высоту антенн исходной и других станций вводят в бортовую ЭВМ. Носитель на высоте сьемки направляют в сторону исходной станции, при этом с помощью радиогеодезической системы с бортовой ЭВМ по измеренным наклонным дальностям до наземных станций производится непрерывное через заданные интервалы времени определение плановых координат носителя относительно антенны исходной наземной станции и приблизи- тельную высоту полета над земной поверхностью НПр. Вычисленные координаты, а также отклонения курса самолета от заданного направления выводятся на устройстве отображения бортовой ЭВМ и НПр. исполь- зуются для управления самолетом с целью проведения его вблизи антенной системы исходной наземной станции. В момент пролета самолета вблизи антенны исходной станции на расстоянии от вертикали R Рдоп. по сигналу борто- вой ЭВМ выполняется регистрация высоты антенны бортовой станции относительно антенны исходной наземной станции и показаний статоскопа. По известной высоте
(абсолютной отметке) антенны исходной станции и измеренной высоте бортовой станции относительно этой антенны бортовая ЭВМ производит вычисление абсолютной высоты центра проектирования аэрофотоаппарата в этой исходной точке. После этого самолет направляют в сторону объекта съемки для выполнения аэрофотосъемки, во время которой в моменты экспозиции по командным импульсам производится измерение наклонных дальностей до наземных станций и регистрация показаний статоскопа. Бортовая ЭВМ производит вычисление превышения центра проектирования относительно абсолютной высоты исходной точки и, используя эти результаты и измеренные наклонные дальности, определяют далее плановые координаты центров проектирования аэрофотоснимков.
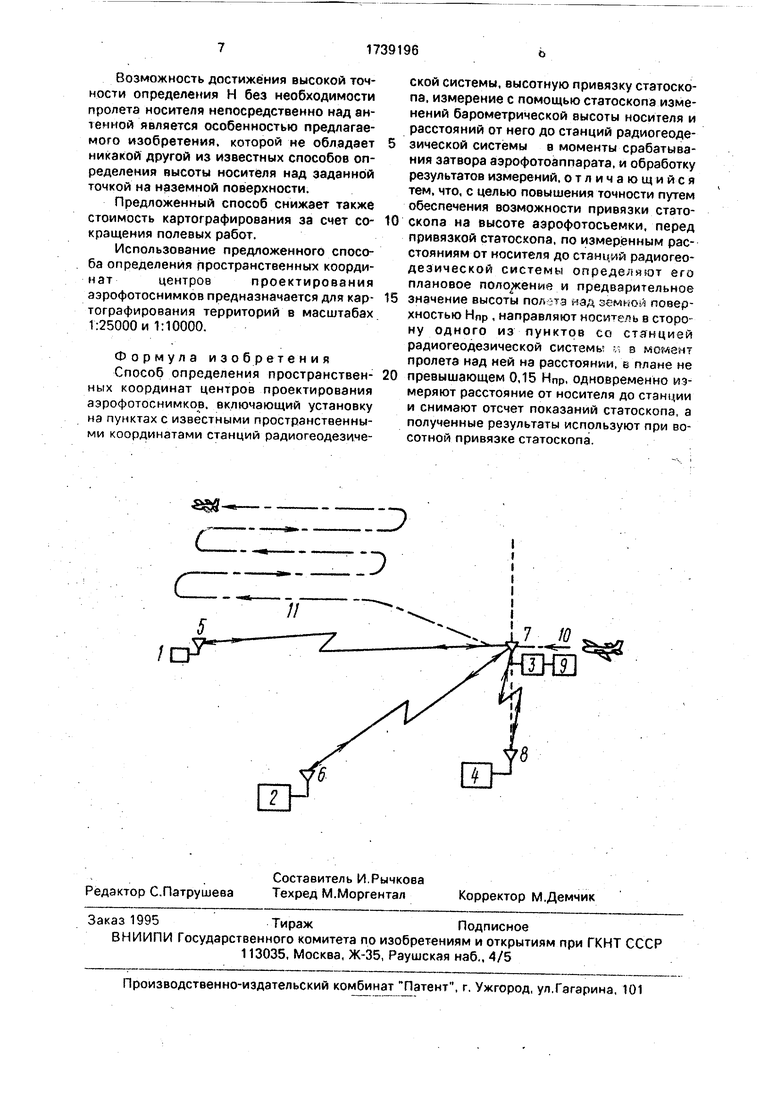
На чертеже показан состав аппаратуры, необходимый для реализации предложенного способа, место размещения отдельных компонентов и маршруты полета носителя. На чертеже обозначено наземные станции 1,2: бортовая станция 3: исходная наземная станция 4; антенны 5 и 6 наземных станций; антенна 7 бортовой станции; антенна 8 исходной наземной станции; бортовая ЭВМ 9; маршрут 10 полета носителя до начала аэросъемки; маршруты 11 полета носителя при аэрофотосъемках.
Антенная система исходной наземной станции имеет горизонтальную и вертикальную направленность приема и излучение радиоволн. Поэтому при измерении вблизи станции практически полностью исключается влияние отраженного от земли сигнала на результат измерения, что существенно повышает точность измерений. Антенная система бортовой станции должна при этом обеспечить одновременную связь с исходной и другими станциями.
Существующая в настоящее время радиогеодезическая аппаратура типа РДС и РДС-2, а также статоскоп С-51 обеспечивает нужную точность измерений. Однако указанная аппаратура не содержит бортовой ЭВМ и не приспособлена для непосредственного ввода информации в такую ЭВМ. Поэтому для практической реатизации предложенного способа в настоящее время выполняется разработка нового комплекса аппаратуры повышенной точности, состоящего из радиогеодезической системы РДС- 3 с бортовой ЭВМ, статоскопа с электронно-цифровым выходом и метеосредств для обеспечения учета влияния метеофакторов на скорость распространения радиоволн.
Возможность достижения высокой точности определения Н без необходимости пролета носителя непосредственно над антенной является особенностью предлагаемого изобретения, которой не обладает никакой другой из известных способов определения высоты носителя над заданной точкой на наземной поверхности.
Предложенный способ снижает также стоимость картографирования за счет сокращения полевых работ.
Использование предложенного способа определения пространственных координатцентровпроектированияаэрофотоснимков предназначается для картографирования территорий в масштабах 1:25000 и 1:10000.
Формула изобретения Способ определения пространственных координат центров проектирования аэрофотоснимков, включающий установку на пунктах с известными пространственными координатами станций радиогеодезической системы, высотную привязку статоскопа, измерение с помощью статоскопа изменений барометрической высоты носителя и расстояний от него до станций радиогеодезической системы в моменты срабатывания затвора аэрофотоаппарата, и обработку результатов измерений, отличающийся тем, что, с целью повышения точности путем обеспечения возможности привязки статоскопа на высоте аэрофотосъемки, перед привязкой статоскопа, по измеренным расстояниям от носителя до станций радиогеодезической системы определяют его плановое положение и предварительное
значение высоты пол -та над земной поверхностью Нпр , направляют носитель в сторону одного из пунктов со станцией радиогеодезической системы в момент пролета над ней на расстоянии, в плане не
превышающем 0,15 НПр, одновременно измеряют расстояние от носителя до станции и снимают отсчет показаний статоскопа, а полученные результаты используют при во- сотной привязке статоскопа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ связи между пересекающимися маршрутами аэрофотосъемки | 1960 |
|
SU140219A1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| Способ определения деформаций свайных опор трубопровода с использованием навигационных спутниковых систем | 2023 |
|
RU2821670C1 |
| БАРОМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТ ТОЧЕК МЕСТНОСТИ | 1973 |
|
SU394659A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2012 |
|
RU2527902C2 |
Изобретение относится к аэрофототопографии. Цель изобретения - повышение точности за счет обеспечения возможности привязки статоскопа на высоте аэрофотосъемки. На участке съемки и вблизи него на трех или более пунктах с известными планово-высотными координатами устанавливают наземные станции радиогеодезической системы. Причем на одном или более исходных пунктах антенна имеет преимущественно вертикальную направленность приема и излучения. Антенна носителя имеет направленность, обеспечивающую необходимую связь между исходной и другими наземными станциями. Перед началом съемки пла- новые координаты и высоты антенны исходных наземных станций вврдят в бортевую ЭВМ. Носитель на высоте съемки направляют в сторону исходной станции и в момент пролета носителя над антенной исходной станции выполняют регистрацию высоты антенны бортовой станции относительно антенны исходной наземной станции и показаний статоскопа. Бортовая ЭВМ производит вычисление абсолютной высоты центра проектирования аэрофотоаппарата в исходной точке. После этого носитель направляют в сторону объекта съемки и произ- водят непрерывную регистрацию показаний Статоскопа и наклонных дальностей до наземных станций. 1 ил, и С (л о
| Геодезия, аэросъемка картография | |||
| убежный опыт | |||
| Сер | |||
| Аэрофототопография | |||
| Экспресс-информация | |||
| Радиогеодезическая система Тридан Ш | |||
| Франция | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Геодезия, аэросъемка, картография | |||
| Зарубежный опыт | |||
| Сер | |||
| Геодезия | |||
| Экспресс-информация | |||
| Вып | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Геодезия, аэросъемка, картография | |||
| Зарубежный опыт | |||
| Сер | |||
| Аэрофототопография, Экспресс-информация | |||
| Вые | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЦНИИГАиК ГУГК, 1988,с.1-9 | |||
| Гилль И.Л | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Недра, 1975 | |||
