Область техники, к которой относится изобретение
Данный способ предназначен для применения в системах управления движением рельсового подвижного состава, в частности в системах автоматики и телемеханики, с целью повышения общей безопасности движения.
Уровень техники
В настоящее время существует проблема организации безопасного движения рельсового подвижного состава, заключающаяся в том, что хотя и имеются системы контроля положения остряков стрелочных переводов, использующие напольную аппаратуру, в то же время нет систем контроля положения стрелочных переводов, осуществляющих контроль с использованием только бортовой аппаратуры рельсового подвижного состава. С учетом того, что на многих участках дорог отсутствует передача информации о положении стрелочных переводов от напольной аппаратуры в систему управления рельсового подвижного состава, бортовая аппаратура современного рельсового подвижного состава в своей работе никак не использует информацию о фактическом положении стрелок.
Известен способ контроля положения стрелочных переводов, используемый в системе маневровой автоматической локомотивной сигнализации (МАЛС) и системе управления маневровыми маршрутами с локомотивов (ТММЛ) [1].
Данные системы основаны на схемах электрической централизации (ЭЦ) и функционируют благодаря наличию канала связи между ЭЦ и локомотивом. При ЭЦ у каждого стрелочного перевода устанавливают электропривод, который переводит стрелки и обеспечивает механическое запирание и контроль положения ее остряков. Контроль положения остряков стрелочных переводов осуществляется следующим способом. К каждому остряку стрелочного перевода присоединяются контрольные линейки. Смещение остряков во время перевода стрелки вызывает соответствующее смещение контрольных линеек. Свободные концы контрольных линеек при перемещении воздействуют на контрольные контакты (контакты автопереключателя), служащие датчиками положения стрелки в системе ЭЦ.
Основные недостатки существующих способов определения положения остряков стрелочных переводов:
- Положение остряков стрелок определяется косвенным путем по переключению контрольных контактов, а не по реальному отклонению при движении по ней рельсового подвижного состава.
- Большое количество элементов в системе; наличие напольной аппаратуры, эксплуатируемой в сложных климатических условиях, снижает общую надежность системы контроля.
- Локомотивная аппаратура положение стрелки не определяет.
- Способы не позволяют обнаруживать несанкционированный переход рельсового подвижного состава по стрелочному участку до момента занятия секции, следующей за стрелочной, т.е. момента, когда поезд фактически уже движется по несанкционированному пути.
- Имеются участки дорог, не оборудованные напольным контрольным оборудованием (механическая централизация и т.д.).
Способ контроля положения стрелочных остряков, применяемый в системах ТММЛ и МАЛС, принят автором заявки за аналог-прототип.
Сущность изобретения
Рельсовый подвижной состав всегда движется по траектории, определяемой конфигурацией рельсового пути [2]. Более того, все рельсовые транспортные средства из-за связей, накладываемых на направление их движения рельсами, движутся по одному и тому же участку пути всегда практически по одной и той же траектории, через одни и те же точки. Стрелочный участок на пути обладает следующей спецификой - траектория движения рельсового подвижного состава на таком участке однозначно определяется положением направляющих остряков стрелочного перевода. Так как число положений остряков конечно, то и число возможных траекторий движения рельсового подвижного состава по стрелке также конечно. Схемы движения рельсового подвижного состава при движении по стрелочному участку при различном положении остряков стрелок приведены на фиг.1 и 2.
На фиг.1 показана схема движения рельсового подвижного состава по стрелочному участку для случая минусового положения остряков стрелки, что соответствует пропуску рельсового подвижного состава с отклонением на другой путь.
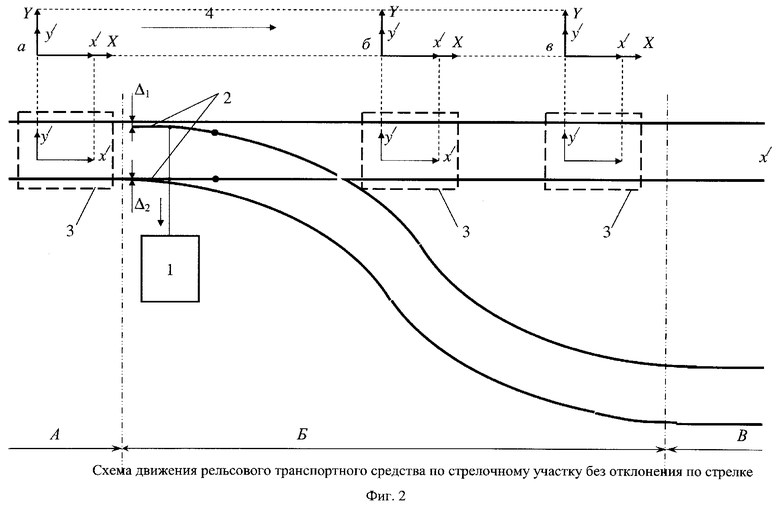
На фиг.2 показана схема движения рельсового подвижного состава по стрелочному участку для случая плюсового положения остряков стрелки, что соответствует пропуску рельсового подвижного состава в прямом направлении по тому же пути.
Все схемы движения представлены видами на путь сверху.
Введем две системы координат: неподвижную относительно поверхности Земли (абсолютную систему координат) и систему координат, жестко связанную с корпусом рельсового транспортного средства.
Как видно из фиг.1 и фиг.2, определение положения остряков стрелки осуществляется следующим образом.
Сначала производится обнаружение участка приближения рельсового подвижного состава к стрелочному участку пути А. Приближение рельсового транспортного средства к стрелочному участку можно определить путем сравнения координаты местоположения рельсового подвижного состава с координатой месторасположения стрелочного участка пути. В свою очередь, контроль координаты местоположения рельсового подвижного состава может осуществляться счислением пройденного пути, возможно также применение и иных способов обнаружения приближения рельсового подвижного состава к стрелочному участку, в т.ч. способов с применением напольных датчиков.
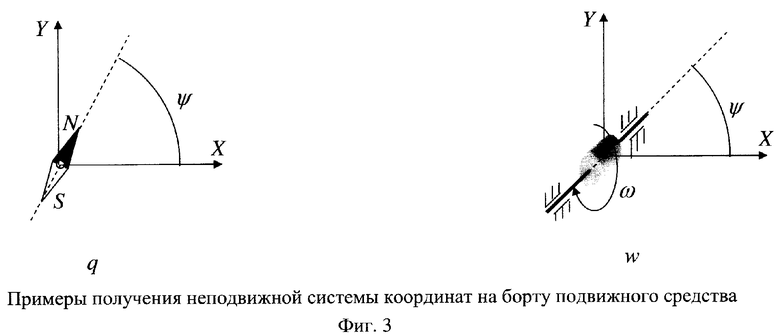
На участке приближения рельсового подвижного состава к стрелочному участку система координат, жестко связанная с корпусом рельсового подвижного состава, приводится в соответствие с неподвижной системой координат, связанной с поверхностью Земли а. Приведение в соответствие осуществляется путем измерения текущего поворота системы координат рельсового подвижного состава по отношению к неподвижной ψ, например, так, как показано на фиг.3.
При прохождении рельсовым подвижным составом стрелочного участка контролируется путь и соответствующее ему изменение угла поворота системы координат рельсового подвижного состава по отношению к углу поворота на участке приближения к стрелочному ϕ1 (ориентация систем координат б).
Далее проводится сравнение измеренного угла поворота системы координат рельсового подвижного состава в момент прохождения стрелочного участка с заранее измеренными или рассчитанными значениями углов для случая плюсового положения стрелочных остряков ϕ+ и для случая минусового положения стрелочных остряков ϕ--.
В результате сравнения измеренного значения угла на участке Б с расчетными, полученными для случаев движения рельсового подвижного состава при плюсовом и минусовом положении стрелки, определяется фактическое положение остряков стрелки:
ϕ1≈ϕ+ - стрелочные остряки находятся в плюсовом положении (фиг.2);
ϕ2≈ϕ-- - стрелочные остряки находятся в минусовом положении (фиг.1).
Следует отметить, что при анализе должно использоваться как значение измеренного угла, так и знак угла (стрелочкой у значка угла указано направление поворота системы координат рельсового транспортного средства, причем за положительное условно принят поворот против часовой стрелки).
Анализ измеренных и расчетных углов для каждой стрелки может осуществляться также по нескольким точкам, через небольшие интервалы пути. В этом случае на участке Б после прохождения РПС некоторого расстояния, бортовой аппаратурой снова контролируется изменение угла (ориентация систем координат в), которое сравнивается с расчетными значениями для данной точки пути, полученными для случаев движения рельсового подвижного состава с отклонением по стрелке на другой путь и без отклонения.
Таким образом, при движении по стрелочному участку производится сравнение действительной траектории движения с расчетными траекториями для случаев движения при плюсовом и минусовом положении стрелочных остряков.
Процесс идентификации положения стрелочных остряков повторится при приближении рельсового транспортного средства к следующей стрелке.
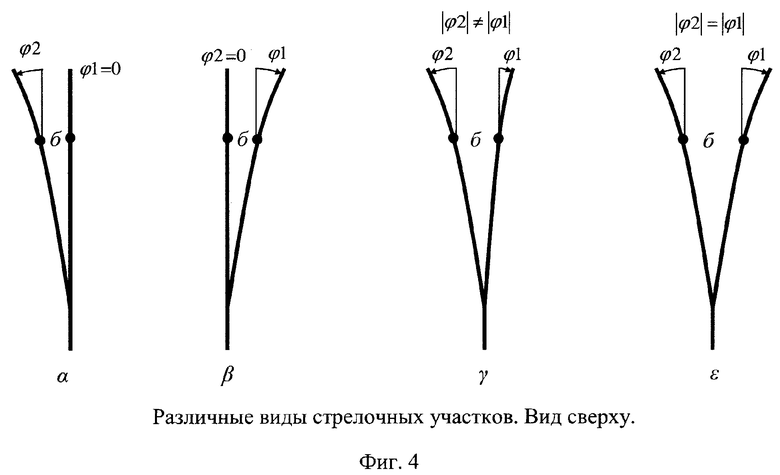
Так как на железной дороге нашли применение различные типы стрелочных переводов, то на фиг.4 представлены их основные типы:
α - обыкновенный левосторонний стрелочный перевод.
β - обыкновенный правосторонний стрелочный перевод.
γ - несимметричный стрелочный перевод.
ε - симметричный стрелочный перевод.
Как следует из фиг.4, для каждого типа переводов отличаются только знаки и значения углов поворота системы координат рельсового транспортного средства в момент прохождения стрелочного участка при различном положении остряков стрелочного перевода.
Сведения, подтверждающие возможность осуществления изобретения
Реализация заявленного способа определения положения остряков стрелочных переводов возможна в случае, если объективно существуют устройства, которые могли бы измерять параметры вращения системы координат, образуемой рельсовым транспортным средством и одновременно контролировать положение неподвижной системы координат с борта подвижного состава. В настоящее время существует большое количество датчиков, удовлетворяющих указанным требованиям. Это датчики гироскопического, магнитного, гиромагнитного типа и т.д. [3]. Перечисленные датчики широко применяются в различных отраслях науки и техники. Следовательно, реализация заявленного способа при современном уровне развития техники возможна.
Перечень фигур чертежей
Фигура 1. Схема движения рельсового транспортного средства по стрелочному участку с отклонением по стрелке.
Фигура 2. Схема движения рельсового транспортного средства по стрелочному участку без отклонения по стрелке.
1. Стрелочный электропривод.
2. Остряки стрелочного перевода.
3. Рельсовое транспортное средство.
4. Направление движения рельсового транспортного средства.
А. Участок пути перед стрелочным участком.
Б. Стрелочный участок пути.
В. Участок пути после стрелочного участка.
а - Ориентация неподвижной системы координат и системы координат рельсового транспортного средства при движении по участку пути перед стрелочным участком.
б - Ориентация неподвижной системы координат и системы координат рельсового транспортного средства при движении по стрелочному участку пути (первая точка контроля).
в - Ориентация неподвижной системы координат и системы координат рельсового транспортного средства при движении по участку пути на некотором расстоянии от первой точки контроля (вторая точка контроля).
Y, Х - система координат, приведенная в соответствие с неподвижной системой координат.
х/, y/ - система координат, жестко связанная с рельсовым транспортным средством.
Фигура 3. Примеры получения неподвижной системы координат на борту подвижного средства.
q - способ с использованием магнитного компаса.
w - способ с использованием гироскопического эффекта.
Фигура 4. Различные виды стрелочных участков. Вид сверху.
α - обыкновенный левосторонний стрелочный перевод.
β - обыкновенный правосторонний стрелочный перевод.
γ - несимметричный стрелочный перевод.
ε - симметричный стрелочный перевод.
(Направление вращения системы координат рельсового подвижного состава указано стрелкой).
Литература
1. А.А.Устинский, Б.М.Степецкий и др. Автоматика, телемеханика и связь на железнодорожном транспорте. - М.: Транспорт, 1985 г., стр.217-220.
2. Яблонский А.А. Курс теоретической механики. - М.: Высшая школа, 1984 г.
3. Пельпор Д.С. Гироскопические системы ориентации и стабилизации. - М.: Машиностроение. 1982 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛОЧНЫМ ПЕРЕВОДОМ | 1994 |
|
RU2089425C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРЕЛКАМИ С МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИЕЙ | 2004 |
|
RU2264941C1 |
| УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ СТРЕЛОЧНОЙ СЕКЦИИ | 2005 |
|
RU2280578C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛКАМИ | 1995 |
|
RU2099227C1 |
| Устройство управления стрелочным переводом | 1989 |
|
SU1684146A1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2242392C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛКОЙ | 1995 |
|
RU2099228C1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ СТРЕЛОЧНОГО ПЕРЕВОДА | 2004 |
|
RU2278042C2 |
| СИСТЕМА ВНЕШНЕГО БЛОКИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОЙ СТРЕЛКИ | 2019 |
|
RU2721440C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ СТРЕЛОЧНОГО ПЕРЕВОДА | 2012 |
|
RU2514540C1 |
Изобретение относится к области управления движением рельсового подвижного состава. Контроль положения остряков осуществляют с борта рельсового подвижного состава. При приближении рельсового подвижного состава к стрелочному участку обнаруживают это приближение. На участке приближения к стрелочному участку фиксируют текущую ориентацию трехмерной подвижной системы координат, жестко связанной с рельсовым подвижным составом. Отслеживают и определяют изменение положения трехмерной системы координат рельсового подвижного состава в течение времени движения по стрелочному участку по отношению к ее исходной ориентации, зафиксированной в момент приближения к стрелочному участку. Далее сравнивают измеренные значения углов поворота подвижной системы координат с заранее определенными значениями углов для плюсового и минусового положения остряков стрелочного перевода и по результатам сравнения определяют фактическое положение остряков стрелочного перевода. Изобретение позволяет повысить безопасность движения. 4 ил.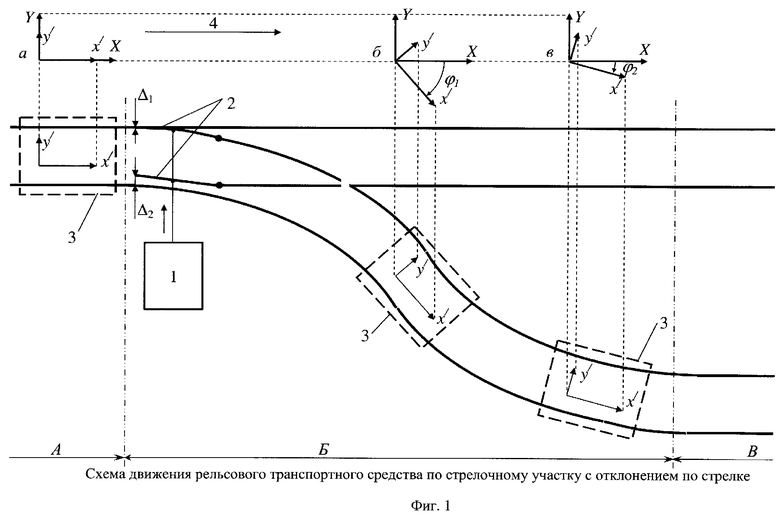
Способ определения положения остряков стрелочных переводов, отличающийся тем, что контроль положения остряков осуществляют с борта рельсового подвижного состава, при этом последовательно обнаруживают приближение рельсового подвижного состава к стрелочному участку, фиксируют текущую ориентацию трехмерной подвижной системы координат, жестко связанной с рельсовым подвижным составом, на участке приближения к стрелочному участку, отслеживают и определяют изменение положения трехмерной системы координат рельсового подвижного состава в течение времени движения по стрелочному участку по отношению к ее исходной ориентации, зафиксированной в момент приближения к стрелочному участку, сравнивают измеренные значения углов поворота подвижной системы координат с заранее определенными значениями углов для плюсового и минусового положений остряков стрелочного перевода и по результатам сравнения определяют фактическое положение остряков стрелочного перевода.
| УСТИНСКИЙ А.А | |||
| и др | |||
| Автоматика, телемеханика и связь на железнодорожном транспорте | |||
| М., Транспорт, 1985, с.217-220 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ОСТРЯКОВ ОТНОСИТЕЛЬНО РАМНЫХ РЕЛЬСОВ СТРЕЛОЧНОГО ПЕРЕВОДА | 2001 |
|
RU2222450C2 |
| Устройство для контроля положения остряков стрелочного привода | 1989 |
|
SU1689173A1 |
| Устройство контроля положения остряка стрелочного перевода | 1982 |
|
SU1041371A1 |

