Предложенное изобретение относится к области авиации и может быть использовано для взлета и посадки воздушных судов.
Известен выбранный в качестве ближайшего аналога способ взлета самолета, заключающийся в том, что в нем разгоняют самолет по взлетно-посадочной полосе до безопасной скорости взлета и выводят его на высоту горизонтального полета (Л.Ф.Николаев. Основы аэродинамики и динамики полета транспортных самолетов, Москва, издательство "Транспорт", 1997, с.186).
Недостатком данного способа является то, что в нем невозможно осуществить короткий и безопасный взлет летательного аппарата.
Технической задачей изобретения в части взлета является обеспечение безопасного короткого взлета летательного аппарата.
Поставленная задача достигается тем, что в способе взлета летательных аппаратов, заключающемся в том, что в нем разгоняют летательный аппарат и выводят его на высоту горизонтального полета, при этом в нем располагают выше высоты горизонтального полета воздушную гавань и соединяют ее с землей, к воздушной гавани, со стороны земли, жестко крепят на стойках направляющую замкнутого контура, имеющую внутренние разветвления, располагают на направляющей подвижные приводы с гибкими тросами и захватными устройствами, а на летательном аппарате выполняют устройство для захвата захватным устройством, соединяют захватное устройство с устройством для захвата захватным устройством на летательном аппарате, находящимся на поверхности земли, поднимают летательный аппарат на гибком тросе при помощи привода на высоту горизонтального полета, включают двигатели летательного аппарата и разгоняют его, отстыковывают захватное устройство от устройства для захвата захватным устройством на летательном аппарате при достижении им скорости горизонтального полета.
Известен выбранный в качестве ближайшего аналога способ спасения летательного аппарата, заключающийся в выводе захватного устройства на тросе, гашении горизонтальной составляющей скорости летательного аппарата при помощи расчетного торможения троса, при достижении горизонтальной составляющей скорости, близкой к посадочной при торможении троса, выполняют гашение вертикальной составляющей скорости летательного аппарата (Патент РФ №2096272, кл. МПК В 64 D 45/04, опубл. 20.11.97, Бюл. №32).
Недостатком данного способа является отсутствие возможности осуществить безопасную короткую посадку летательного аппарата.
Технической задачей способа в части посадки является осуществление безопасных для здоровья пассажиров посадки и взлета летательного аппарата.
Поставленная задача достигается тем, что в способе посадки летательных аппаратов, заключающемся в выводе захватного устройства на гибком тросе, гашении горизонтальной составляющей скорости летательного аппарата при помощи расчетного торможения гибкого троса, при достижении горизонтальной составляющей скорости, близкой к посадочной при торможении гибкого троса, выполняют гашение вертикальной составляющей скорости летательного аппарата, при этом в нем при подлете летательного аппарата к воздушной гавани выводят захватное устройство на гибком тросе таким образом, чтобы оно вошло в зацепление с устройством для захвата захватным устройством на летательном аппарате, производят гашение горизонтальной и вертикальной составляющих скорости, производят плавное опускание летательного аппарата на поверхность земли.
Известен выбранный в качестве ближайшего аналога дирижабль "Мейкон", содержащий оболочку, наполненную летучим газом, и присоединенные к нижней части оболочки ангар и трапецию для захвата летательных аппаратов (Ричард К. Смит. Авианосцы легче воздуха, Москва, ПК "ВОЗДУХ", 1999 г., стр.170-171).
Недостатком данного устройства является то, что оно не может производить остановку летательных аппаратов, подлетающих к воздушной гавани с большими скоростями.
Технической задачей изобретения в части устройства является расширение функциональных возможностей.
Поставленная задача достигается тем, что в устройство для осуществления взлета и посадки летательных аппаратов, содержащее воздушную гавань, выполненную в виде оболочки, наполненной летучим газом, введены крепящаяся к воздушной гавани при помощи стоек направляющая замкнутого контура, имеющая внутренние разветвления, расположенные на направляющей подвижные приводы с гибкими тросами, на концах которых крепятся захватные устройства, при этом воздушная гавань связана с землей тросом, а направляющая расположена по периметру воздушной гавани со стороны земли.
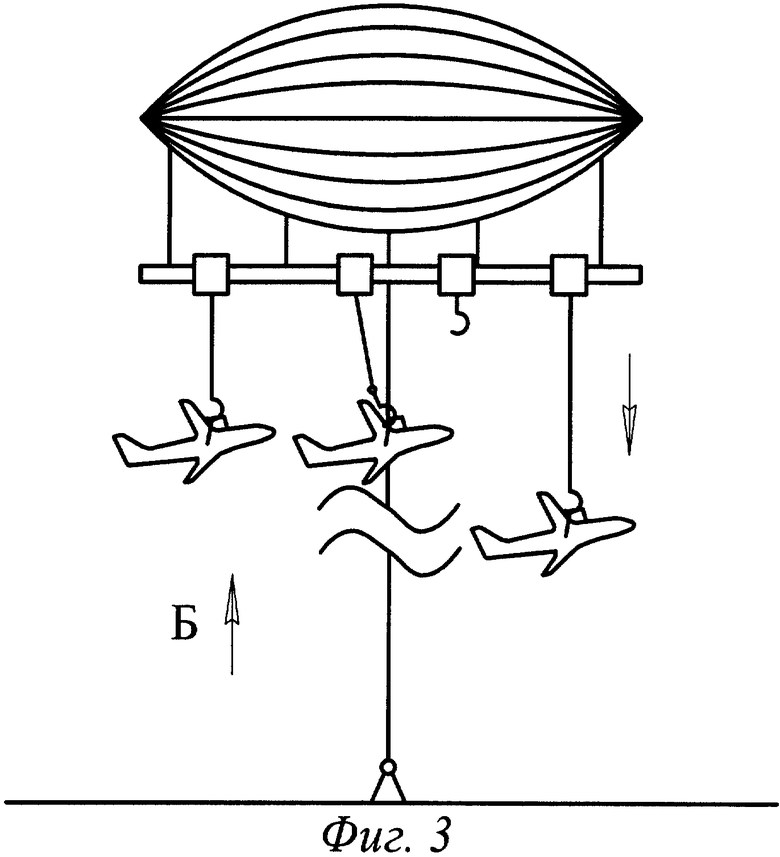
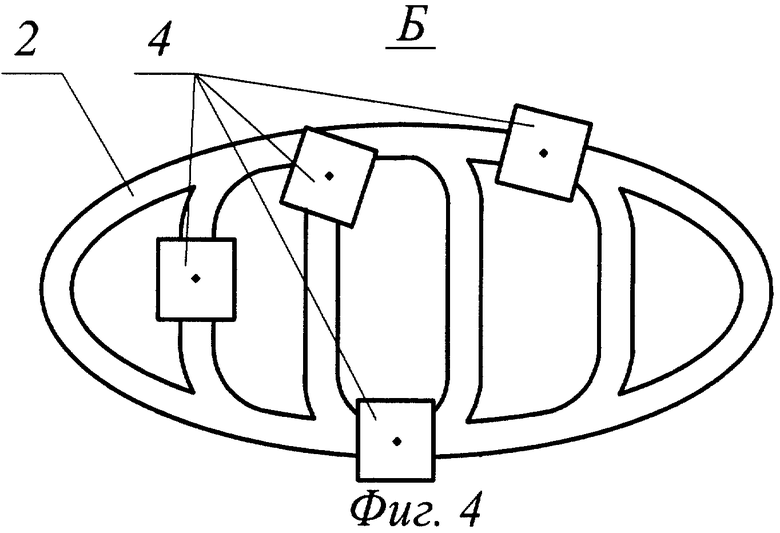
Предложенное изобретение поясняется при помощи схем показанных на фигурах 1, 2, 3 и 4. На фиг.1 показана воздушная гавань и способ взлета летательного аппарата, на фиг.2 показано расположение привода с захватным устройством на направляющей, соединенной при помощи стоек с воздушной гаванью, на фиг.3 показан способ осуществления посадки летательного аппарата, на фиг.4 показан вариант исполнения направляющей.
На фиг.1, 2, 3, 4 приняты следующие обозначения:
- воздушная гавань 1,
- направляющая 2,
- стойки 3,
- подвижные приводы 4,
- гибкий трос 5,
- захватное устройство 6,
- летательный аппарат 7,
- устройство для захвата 8,
- трос 9.
Предложенное изобретение реализуется следующим образом.
На высоте выше высоты горизонтального полета (высота горизонтального полета для разных летательных аппаратов колеблется от 50 до 15000 метров и более) располагают воздушную гавань 1 выполненную, например, в виде больших размеров воздушного шара или стратостата, и жестко соединяют ее с землей, например, при помощи троса 9. Также можно "привязать", иными словами сориентировать, воздушную гавань 1 к определенной точке за счет собственных двигателей (например, ГТД). По периметру воздушной гавани 1 жестко крепят со стороны земли на стойках 3 направляющую 2 замкнутого контура (в качестве направляющей 2 могут быть использованы рельс, тавр и другие профили), на котором располагают подвижные приводы 4 с гибкими тросами 5 и захватными устройствами 6. Кроме того, направляющая 2 может быть выполнена разветвленной внутри замкнутого контура (фиг.4), разветвления осуществляются при помощи стрелок. Разветвления выполняются для более компактной парковки летательных аппаратов. Выполняют захватное устройство 6, например, в виде крюка, а на летательном аппарате 7 выполняют устройство для захвата 8, например, в виде скобы.
Перед началом взлета соединяют захватное устройство 6 с устройством для захвата 8 на летательном аппарате 7. Затем выбирают гибкий трос 5 при помощи привода 4, тем самым поднимая летательный аппарат 7 вверх. После того как летательный аппарат 7 будет поднят на высоту горизонтального полета, прекращают выбирать гибкий трос 5 и включают двигатели летательного аппарата 7, разгоняя его. Одновременно с разгоном летательного аппарата 7 выпускают гибкий трос 5 из привода 4. При этом привод 4 может перемещаться по направляющей 2 (как за счет собственного двигателя, так и за счет силы натяжения гибкого троса 5), так что гибкий трос 5 не будет при натяжении замедлять разгон летательного аппарата 7. Кроме того, за счет собственного двигателя привод 4, перемещаясь по направляющей 2, может разгонять летательный аппарат 7. После того как летательный аппарат 7 будет двигаться с безопасной скоростью полета, отстыковывают захватное устройство 6 от устройства для захвата 8 на летательном аппарате 7.
Перед заходом на посадку летательный аппарат 7 снижает скорость движения и высоту полета. Опускают захватное устройство 6 на гибком тросе 5 на высоту предполагаемой стыковки (высота стыковки может составлять от 50 до 15000 метров и более) летательного аппарата 7 с захватным устройством 6. После того как летательный аппарат 7 подлетел к захватному устройству 6, захватное устройство 6 вводят в зацепление с устройством для захвата 8 на летательном аппарате 7. Затем осуществляют расчетное торможение гибкого троса 5 при помощи привода 4, тем самым осуществляя гашение горизонтальной составляющей скорости летательного аппарата 7. При достижении горизонтальной составляющей скорости летательного аппарата 7, близкой к посадочной при торможении гибкого троса 5, начинают выполнять гашение вертикальной скорости путем выборки гибкого троса 5. При гашении горизонтальной составляющей скорости движения летательного аппарата 7 привод 4 может перемещаться по направляющей 2, что снижает нагрузку на трос 9, соединяющий воздушную гавань 1 с землей. После того как горизонтальная и вертикальная составляющие скорости движения летательного аппарата 7 станут равными нулю, летательный аппарат 7 плавно опускают на поверхность земли.
При этом для упрощения конструкции воздушной гавани 1 приводы 4 могут расположить стационарно на стойках 3.
Таким образом, за счет того, что в способе взлета и посадки располагают выше средней высоты горизонтального полета воздушную гавань и соединяют ее с землей, по периметру воздушной гавани, со стороны земли, жестко крепят на стойках направляющую замкнутого контура, располагают на направляющей подвижные приводы с гибкими тросами и захватными устройствами, а на летательном аппарате выполняют устройство для захвата захватным устройством, с помощью захватного устройства производят безопасные для здоровья пассажиров взлет и посадку летательных аппаратов.

Изобретение относится к транспортно-буксировочным авиационным средствам, взаимодействующим с летательными аппаратами (ЛА). Предлагаемый способ взлета включает соединение ЛА с тросом, выпущенным из воздушной гавани, подъем ЛА на высоту его горизонтального полета, включение двигателей ЛА, его разгон и освобождение от троса. Способ посадки включает соединение троса с ЛА при подлете ЛА к воздушной гавани, гашение скорости ЛА путем выпуска и торможения троса и плавное опускание ЛА на поверхность земли. Воздушную гавань размещают выше высоты горизонтального полета ЛА. Со стороны земли к ней крепят направляющую с подвижными на ней приводами, соединенными тросами с захватными устройствами для ЛА. При этом одновременно с разгоном ЛА при взлете выпускают трос из привода, перемещая привод по направляющей. Гашение горизонтальной скорости ЛА при посадке производят, перемещая привод по направляющей. Технический результат изобретения состоит в обеспечении безопасных укороченных взлета и посадки ЛА. 3 н. и 4 з.п. ф-лы, 4 ил.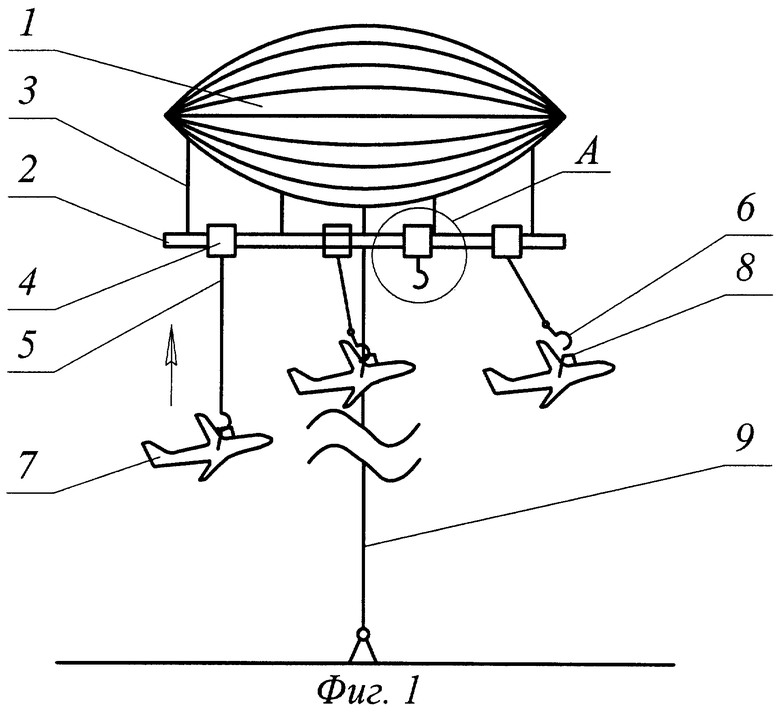
| US 1869506 А, 02.08.1932 | |||
| US 4757959 A, 19.07.1988 | |||
| Способ получения биосорбента ионов радиоактивных металлов | 1990 |
|
SU1792738A1 |
| Способ посадки пилотируемого летательного аппарата на авианесущий корабль и система для ее осуществления | 1990 |
|
SU1837038A1 |

