Изобретение относится к области рыболовства - лову рыб пассивными орудиями лова (ПОЛ): сетями, ярусами и др., в процессе их вертикальной миграции (например, суточной миграции и др.), а также к области акустики, и, в частности, к передаче под водой гидроакустических кодированных сигналов управления.
Задача, которая решается изобретением, заключается в увеличении продуктивности и оперативности лова, снижении трудовых затрат на неограниченном ареале промысла с расширением области применения при обеспечении экологической безопасности лова путем дистанционного управления процессом многократного - не менее двух раз, и равномерного - синхронно с обеих сторон, подъема ПОЛ на новую глубину, определенную гидроакустическим способом - по данным рыбопоискового средства: гидролокатора, эхолота и др. или иным способом - по данным многолетних суточных наблюдений в данном районе лова и др., т.е. на глубину, соответствующую текущему горизонту нахождения рыб в процессе их вертикальной (например, суточной и т.д.) миграции: придонный слой - в дневное время (с 10:00 до 16:00), глубинный слой - вечерние сумерки (с 16:00 до 22:00), приповерхностный слой - в ночное время (с 22:00 до 04:00) и т.д.
Известен способ лова рыб, заключающийся в горизонтальной установке ПОЛ (например, сети) в заданном районе промысла и на заданную глубину, определенную гидроакустическим способом - по данным рыбопоискового средства (эхолота и др.), или иным способом - по данным многолетних наблюдений в данном районе лова, попадании рыб в зону удерживающего действия ПОЛ и удержания рыб в нем - их застревании в ячеях, запутывании в сетном плотнее и др., подъеме ПОЛ на поверхность моря и извлечении из него рыб [1, 2].
К недостаткам данного способа относятся:
1. Низкая эффективность лова из-за невозможности лова рыб в процессе их вертикальной (например, суточной) миграции.
2. Невозможность дистанционного подъема ПОЛ на поверхность после окончания процесса лова.
3. Невозможность лова в условиях активной конкуренции рыбаков при развитом волнении моря и плавающих льдах, интенсивном судоходстве и др.
Известен способ лова морских биологических объектов (например, кальмара), заключающийся в вертикальной установке ПОЛ (например, вертикального пелагического яруса) в заданном районе лова, определенном гидроакустическим способом - по данным рыбопоискового средства (эхолота и др.), или иным способом - по данным многолетних наблюдений в данном районе промысла, попадании объекта лова в зону действия ПОЛ и удержания объекта лова в нем - заглатывании крючков с наживой, подъеме ПОЛ на поверхность моря и извлечении из него объекта лова [1, 2, 3].
К недостаткам данного способа относятся:
1. Низкая эффективность из-за лова морских биологических объектов в небольшом объеме воды.
2. Невозможность дистанционного подъема ПОЛ на поверхность после окончания процесса лова.
3. Невозможность лова в условиях активной конкуренции рыбаков при развитом волнении моря и плавающих льдах, интенсивном судоходстве и др.
Наиболее близким по технической сущности к заявляемому относится способ лова рыб в процессе их вертикальной миграции, выбранный в качестве способа-прототипа, заключающийся в формировании горизонтального порядка из одной и более сетей и его установки, в формировании вертикального порядка из одной и более сетей и его установки, обвязки горизонтального и вертикального порядков гибкой связью и их объединении в пассивное орудие лова (ПОЛ), установленное в заданном водном пространстве, определенном заранее гидроакустическим способом - по данным рыбопоискового средства, или иным способом - по данным многолетних наблюдений в данном районе лова и др., попадании рыб в зону удерживающего действия ПОЛ и удержании рыб в нем - их застревании в ячеях и запутывании в сетном плотнее, подъеме ПОЛ на поверхность моря и извлечении из него рыб [4].
К недостаткам способа-прототипа относятся:
1. Недостаточная продуктивность (эффективность лова) лова - из-за невозможности корректного учета вертикальной миграции рыб в данном районе.
2. Недостаточная оперативность лова - из-за использования большого количества горизонтальных и вертикальных сетей, невозможности дистанционного подъема ПОЛ на поверхность моря после окончания процесса лова рыб и др.
3. Высокие трудовые затраты - из-за использования большого количества горизонтальных и вертикальных сетей и др.
4. Ограниченный ареал промысла - из-за невозможности лова в условиях плавающих льдов и т.д.
5. Ограниченная область применения - из-за невозможности лова при развитом волнении моря, активном противоборстве конкурентов и браконьеров, интенсивном судоходстве и т.д.
6. Невозможность аварийного подъема ПОЛ - после отрыва (ветром, волнением, проходящими судами, недобросовестными конкурентами и др.) маркерных буев, находящихся на поверхности и др.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в продуктивном и оперативном лове рыб при минимальных трудовых затратах на неограниченном ареале промысла с расширением области применения при обеспечении экологической безопасности лова.
Поставленная цель достигается тем, что в известном способе лова рыб в процессе их вертикальной миграции, заключающемся в формировании горизонтального порядка из одной и более сетей - ПОЛ, его установки в заданном водном пространстве, определенном гидроакустическим способом - по данным рыбопоискового средства, или иным способом - по данным многолетних наблюдений в данном районе лова и др., попадании рыб в зону удерживающего действия ПОЛ и удержании рыб в нем (их застревании в ячеях и запутывании в сетном полотне), подъеме ПОЛ на поверхность моря и извлечении из него рыб первоначальную постановку ПОЛ осуществляют в самую нижнюю часть заданного водного пространства - на горизонт нахождения основной массы рыб в данное время суток с небольшим - 1…1,5 высоты сети, упреждением; дополнительно, перед каждым последующим изменением горизонта (уменьшением глубины) нахождения ПОЛ, последовательно формируют, усиливают и в сторону ПОЛ излучают гидроакустические кодированные сигналы синхронизации FC - для обеспечения последующего синхронного срабатывания механических замков НПМ или ВПМ, а также гидроакустические кодированные сигналы управления Fi работой НРМ или ВПМ - для одновременного срабатывания их механических замков и освобождения соответствующих запасов вертикального рабочего фала; дополнительно осуществляют первый подъем ПОЛ по первому гидроакустическому кодированному сигналу управления F1, передаваемому с РПС, после подъема основной массы рыб на глубину, превышающую 1-1,5 высоты сети ПОЛ, изменяя глубину нахождения ПОЛ на 2-3 высоты его сети (с упреждением, равным 1-1,5 высотам сети) - за счет синхронного срабатывания нижних механических замков у двух НПМ и синхронного освобождения первых запасов вертикального рабочего фала, находившихся ранее в нижних контейнерах; второй подъем ПОЛ осуществляют по второму гидроакустическому кодированному сигналу управления F2, передаваемому с РПС, после подъема основной массы рыб на глубину, превышающую 1-1,5 высоты сети ПОЛ, изменяя глубину нахождения ПОЛ на 1,5-2 высоты его сети - за счет синхронного срабатывания верхних механических замков НПМ и синхронного освобождения вторых запасов вертикального рабочего фала, находившихся ранее в средних контейнерах; третий подъем ПОЛ осуществляют по третьему гидроакустическому кодированному сигналу управления F3, передаваемому с РПС, после подъема основной массы рыб на глубину, превышающую 1,5-2 высоты сети ПОЛ, изменяя глубину нахождения ПОЛ на 1-1,5 высоты его сети - за счет синхронного срабатывания механических замков ВПМ и синхронного освобождения необходимых (а не всего) третьих запасов вертикального рабочего фала, находившихся ранее в верхних контейнерах; при этом третьи запасы вертикального рабочего фала не менее чем на 10% (для учета течения в районе установки ПОЛ) превышают глубину района установки ПОЛ и размещены в соответствующих верхних контейнерах определенным образом (уложены в бухту кольцами из «английской удавки» - морскими узлами, легко распускающимися при разматывании бухты во время всплытия ПОЛ) обеспечивая, тем самым, возможность аварийного (из-за обрыв сигнальных буев, находящихся ранее на поверхности и обозначающих границы ПОЛ и др.) подъема ПОЛ с любой глубины (в том числе, со дна) на поверхность моря; дополнительно применяют резервное - временное управление работой всех НПМ и ВПМ за счет использования в каждом из них идентичных друг другу таймеров, обеспечивающих срабатывание их соответствующих механических замков в установленное заранее время; дополнительно на поверхности моря обозначают границы выставленного ранее ПОЛ при помощи двух идентичных друг другу маркерных буев и вех с проблесковыми маяками, установленными с обеих сторон ПОЛ и соединенными с верхними частями соответствующих ВПМ посредством тонких вертикальных линей, исключающих, из-за небольшого разрывного усилия, возможность подъема с их помощью на поверхность моря недобросовестными конкурентами ПОЛ с выловленной рыбой.
На фиг.1 и фиг.2 представлена структурная схема устройства, реализующего разработанный способ лова рыб в процессе их вертикальной миграции. При этом на фиг.1 иллюстрируется структурная схема устройства преимущественно к общему принципу реализации разработанного способа; на фиг.2 иллюстрируется структурная схема устройства преимущественно к верхнему и нижнему дистанционно управляемым (по гидроакустическому каналу) подводным модулям.
На фиг.3 иллюстрируется внешний вид двухсекционного (с двумя механическими замками) нижнего подводного модуля (НПМ), обладающего отрицательной плавучестью. На фиг.4 иллюстрируется внешний вид односекционного верхнего подводного модуля (ВПМ), обладающего положительной плавучестью, а также командного модуля (КМ).
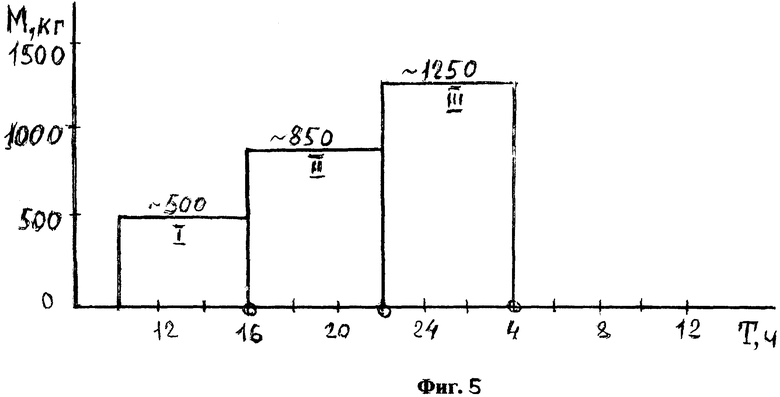
На фиг.5 в виде соответствующих гистограмм иллюстрируются средние уловы рыб при нахождении ПОЛ на одном (гистограмма I), двух (гистограмма II) и трех (гистограмма III) горизонтах в процессе реализации разработанного способа лова рыб в процессе их вертикальной миграции.
Устройство содержит (фиг.1 и фиг.2): рыбопромысловое (1) судно (РПС), ПОЛ (2) и объект лова (ОЛ) - рыб (3). При этом на РПС (1) находятся: устройство (4) постановки-выборки ПОЛ (2), КМ (5), навигационная радиолокационная (6) станция (НРЛС) с антенной (7). При этом КМ (5) содержит последовательно электрически соединенные блоки: формирования (8), усиления (9) и излучения (10) гидроакустических кодированных сигналов управления Fi (F1, F2 и F3) и гидроакустических кодированных сигналов синхронизации FC.
В свою очередь ПОЛ (2) содержит: горизонтальный рабочий фал (11), обладающий отрицательной плавучестью (хребтина), к которому крепится горизонтальная сеть (12), вертикальный рабочий фал (13), обладающий положительной плавучестью (буйреп), расположенный с двух сторон горизонтальной сети (12) и нижним концом крепящийся к соответствующему (одному из двух) якорю (14), а также имеющий необходимые запасы вертикального рабочего фала, размещенные в виде двух (с разных сторон горизонтальной сети) идентичных друг другу нижних (около дна) контейнеров (15), идентичных друг другу средних (под горизонтальной сетью) контейнеров (16) и идентичных друг другу верхних (над горизонтальной сетью) контейнеров (17). При этом между соответствующими (находящимися с разных сторон горизонтальной сети (12) на одинаковом расстоянии от дна) нижними контейнерами (15) и средними контейнерами (16) размещены два идентичных друг другу НПМ (18), а два идентичных друг другу ВПМ (19) расположены выше горизонтальной сети (12) и выше верхних контейнеров (17). Орудие лова (2) также содержит: тонкий вертикальный линь (20), имеющий положительную плавучесть и прикрепленный нижним концом к соответствующему (одному из двух) ВПМ (19), а верхним концом - к соответствующему (одному из двух) маркерному бую (21). В свою очередь каждый из двух маркерных буев (21) при помощи тонкого горизонтального линя (22), соединен с соответствующей вехой (23), на верхнем конце которой находится проблесковый маяк (24).
При этом каждый из двух НПМ (18) и каждый из двух ВПМ (19) содержит идентичные друг другу блоки: приема (25) и усиления (26) гидроакустических кодированных сигналов синхронизации на частоте FC и гидроакустических кодированных сигналов управления на частотах F1, F2 и F3, идентичные друг другу электромагниты (30) и механические замки (31), в каждый из которых в исходном положении вставлены идентичные друг другу соединительные кольца (32), идентичные друг другу высокоемкостные аккумуляторы (33) и таймеры (34).
При этом каждый из двух НПМ (18) содержит идентичные друг другу дешифраторы (27) и (28) гидроакустических кодированных сигналов синхронизации на частоте FC и гидроакустических кодированных сигналов управления на частотах F1 и F2 соответственно, а каждый из двух ВПМ (19) содержит идентичные друг другу дешифраторы (29) гидроакустических кодированных сигналов синхронизации на частоте FC и гидроакустических кодированных сигналов управления на частоте F3.
При этом выход каждого из высокоемкостных аккумуляторов (33) ПНМ (18) и ВПМ (19) соединен с соответствующими блоками усиления (26), дешифраторами: (27), (28) и (29), электромагнитами (30) и таймерами (34). При этом корпус каждого из двух ВПМ (19) имеет: яркую окраску и светоотражающее покрытие - для эффективного визуального поиска, а также специальное радиолокационное покрытие - для эффективного технического поиска (эффективного отражения сигналов) с использованием НРЛС (6) РПС (1).
Способ реализуют следующим образом (фиг.1, фиг.2).
По типовой схеме: РПС (2) выходит утром из базы и следует в район лова - применительно к прибрежному рыболовству, или выходит утром в заданный квадрат района лова - применительно к океанскому рыболовству.
В заданном районе лова рыб - ОЛ (3) гидроакустическим способом - по данным рыбопоискового гидролокатора или эхолота РПС (1) с НРЛС (6) и антенной (7), или иным способом - по данным многолетних наблюдений и т.д. определяют характерные глубины нахождения ОЛ (3) в то или иное время суток (в процессе вертикальной миграции рыб).
Как известно, РПС (1) может обслуживать не одно, а несколько - не мене двух, ПОС (2), поэтому, в зависимости от рыбопромысловой обстановки, заранее предусматривают возможность изменения - в соответствии с вертикальной миграцией рыб, горизонта нахождения данного ПОЛ (2), как по гидроакустическому кодированному сигналу управления Fi, передаваемому при помощи КМ (5) с РПС (1), так и в установленное заранее время (например, в 16:00, 22:00 и 04:00 при первоначальной постановке ПОЛ в 10:00) - с помощью соответствующих таймеров (34). При этом временной канал управления является резервным гидроакустическому каналу управления.
Затем с РПС (1) в дневное время суток, когда ОЛ (3) находится в придонных слоях воды, осуществляют первоначальную постановку ПОЛ (2) в самую нижнюю часть заданного водного пространства - на горизонт нахождения основной массы рыб в данное время суток с небольшим: 1-1,5 высоты горизонтальной сети (12) ПОЛ (2) упреждением. При этом на поверхности моря обозначают границы выставленного ПОЛ (2) при помощи двух идентичных друг другу маркерных буев (21) и соединенных в ними, при помощи тонких горизонтальных линей (22), вех (23) с проблесковыми маяками (24), установленных с обеих сторон ПОЛ (2) и соединенных с верхними частями соответствующих ВПМ (19) посредством тонких вертикальных линей (20), исключающих, из-за небольшого разрывного усилия, возможность подъема с их помощью на поверхность моря недобросовестными конкурентами ПОЛ (2), в том числе с уже выловленной рыбой.
При наличии развитого (больше 3-4 баллов) волнения моря маркерные буи (21), вследствие незначительных линейных размеров и парусности, более надежно удерживаются на поверхности моря, чем типовые рабочие буи, имеющие гораздо большие линейные размеры и парусность. По этой же причине более эффективно работают якоря (14), которые, в конечном итоге, более надежно удерживают в толще воды горизонтальную сеть (12) и ПОЛ (2), в целом. При попытке недобросовестных конкурентов и браконьеров поднять на поверхность моря установленное ранее ПОЛ (2), оборвется соответствующий тонкий вертикальный линь (20), имеющий небольшое разрывное усилие, и ПОЛ с рыбой останется на месте. То же самое произойдет при наличии на поверхности моря плавающих льдов, проходящих судов и др.
В процессе движения в горизонтальной плоскости с постепенным подъемом к поверхности - поиск корма и т.д., скопление рыб - ОЛ (2) попадает в зону облова - удерживающего действия ПОЛ (2), и происходит лов рыб в нем: застревание рыб в ячеях и их запутывании в сетном полотне.
Однако через некоторое время в процессе естественной суточной миграции основная масса скопления рыб выходит из зоны облова - поднимается выше горизонтальной сети (12) ПОЛ (2) и продолжает движения в горизонтальной плоскости с постепенным подъемом к поверхности - поиск корма.
В расчетное время подъема ПОЛ (2) на новый горизонт, или исходя из промысловой обстановки, РПС (1) подходит в район с ПОЛ (2), не допуская отпугивания ОЛ (3) своими низкочастотными (НЧ) подводными акустическими (шумы работающих механизмов и др.) и гидродинамическими (шумы обтекания водой корпуса РПС и др.) шумами и с помощью рыбопоискового гидролокатора или эхолота определяет горизонт текущего нахождения ОЛ (3) в толще воды, в том числе относительно ПОЛ (2).
С РПС (1), определив, что основное скопление рыб - ОЛ (3) поднялось на 1-1,5 высоты выше горизонтальной сети (12), с помощью КМ (5) дают гидроакустическую кодированную команду управления для срабатывания нижних механических замков (31) НПМ (18) и освобождения запасов вертикального рабочего фала из идентичных друг другу нижних контейнеров (15), размещенных с двух сторон горизонтальной сети (12) и ниже ее.
Для этого РПС (1) ложится в дрейф, и с его борта опускают блок (10) КМ (5) на глубину как минимум (для исключения экранирования корпусом РПС) на 5-10 м ниже киля РПС (1). Затем, в последовательно электрически соединенных блоках (8) и (9), осуществляют набор и усиление до необходимого уровня (определяемого дистанцией до НПМ ПОЛ) гидроакустического кодированного (для исключения случайного срабатывания от сигналов природного и техногенного происхождения, а также для исключения подбора сигналов недобросовестными конкурентами) сигнала синхронизации FC, а также его последующее направленное - в сторону НПМ (18) излучение, с помощью блока (10) КМ (5).
В идентичных друг другу блоках приема (25) и усиления (26), а также в идентичных друг другу: дешифраторах (27) - для нижних замков каждого из двух НПМ (18), в дешифраторах (28) - для верхних замков каждого из двух НПМ (18), в дешифраторах (29) - для замков каждого из двух ВПМ (19), осуществляют прием, усиление и дешифрацию (сравнение установленного заранее кода синхронизации с принятым кодом синхронизации) принятых гидроакустических кодированных сигналов синхронизации FC. В случае совпадения установленного и принятого кодов электронные блоки всех НПМ (18) и ВПМ (19) синхронизируются и переводятся в режим ожидания приема соответствующего им гидроакустического кодированного сигнала управления. Синхронизация всех подводных модулей делается для того, чтобы в случае форс-мажорных обстоятельств можно было немедленно прекратить лов рыб и поднять ПОЛ (2) на поверхность моря, или, исходя из условий промысла: рыба резко пошла на поверхность и т.д., обеспечить синхронный подъем ПОЛ (2) не на 2-3 высоты горизонтальной сети (12), а на 4-6 высот горизонтальной сети (12) и т.д.
Затем в последовательно электрически соединенных блоках (8) и (9) осуществляют набор и усиление до необходимого уровня гидроакустического кодированного сигнала управления F1, а также его последующее направленное в сторону НПМ (18) излучение, с помощью блока (10) КМ (5).
В идентичных друг другу блоках приема (25), усиления (26) и дешифраторах (27) осуществляют прием, усиление и дешифрацию принятых гидроакустических кодированных сигналов управления F1. В случае совпадения установленного и принятого кодов, сигналы управления синхронно подаются на электромагниты (30), которые в свою очередь синхронно открывают нижние механические замки (31) НПМ (18). Под действием положительной плавучести, обеспечивающейся ВПМ (19), из механических замков (31) синхронно освобождаются вставленные ранее в них соединительные кольца (32). После чего из нижних идентичных друг другу контейнеров (15) синхронно выходят соответствующие запасы вертикального рабочего фала (13) и горизонтальная сеть (12) синхронно поднимается на 2-3 своей высоты и занимает новый горизонт.
В процессе движения в горизонтальной плоскости с постепенным подъемом (благодаря естественной суточной миграции) к поверхности - поиск корма и т.д., скопление рыб - ОЛ (2) попадает в новую зону облова ПОЛ (2) и происходит новый (повторный) лов рыб в ней: застревание рыб в ячеях и их запутывание в сетном полотне. Однако через некоторое время в процессе естественной суточной миграции основная масса скопления рыб выходит из новой зоны облова - поднимается выше горизонтальной сети (12) ПОЛ (2) и продолжает движения в горизонтальной плоскости с постепенным подъемом к поверхности - поиск корма.
По аналогии с изложенным выше, с РПС (1), определив, что основное скопление рыб - ОЛ (3) поднялось на 1-1,5 высоты горизонтальной сети (12), с помощью КМ (5) дают гидроакустическую кодированную команду управления для срабатывания верхних механических замков (31) НПМ (18) и освобождения запасов вертикального рабочего фала из идентичных друг другу средних контейнеров (16), размещенных с двух сторон горизонтальной сети (12) и под ней. Для этого РПС (1) снова ложится в дрейф и с его борта опускают блок (10) КМ (5) на глубину как минимум на 5-10 м ниже киля РПС (1). Затем, в последовательно электрически соединенных блоках (8) и (9), осуществляют набор и усиление до необходимого уровня гидроакустического кодированного сигнала синхронизации FC, а также его последующее направленное в сторону НПМ (18) излучение, с помощью блока (10) КМ (5).
В идентичных друг другу блоках приема (25) и усиления (26), а также в идентичных друг другу: дешифраторах (28) - для верхних замков каждого из двух НПМ (18) и дешифраторах (29) - для замков каждого из двух ВПМ (19), осуществляют прием, усиление и дешифрацию принятых гидроакустических кодированных сигналов синхронизации FC. В случае совпадения установленного и принятого кодов соответствующие электронные блоки всех НПМ (18) и все электронные блоки ВПМ (19) синхронизируются и переводятся в режим ожидания приема соответствующего им гидроакустического кодированного сигнала управления. Затем в последовательно электрически соединенных блоках (8) и (9) осуществляют набор и усиление до необходимого уровня гидроакустического кодированного сигнала управления F2, а также его последующее - направленное в сторону НПМ (18) излучение, с помощью блока (10) КМ (5).
В идентичных друг другу блоках приема (25), усиления (26) и дешифраторах (28) осуществляют прием, усиление и дешифрацию принятых гидроакустических кодированных сигналов управления F2. В случае совпадения установленного и принятого кодов сигналы управления синхронно подаются на электромагниты (30), которые в свою очередь синхронно открывают верхние механические замки (31) НПМ (18). Под действием положительной плавучести, обеспечивающейся ВПМ (19), из механических замков (31) синхронно освобождаются вставленные ранее в них соединительные кольца (32). После чего из средних идентичных друг другу контейнеров (16) синхронно выходят соответствующие запасы вертикального рабочего фала (13), и горизонтальная сеть (12) синхронно поднимается на 2-3 своей высоты и занимает новый горизонт.
В процессе движения в горизонтальной плоскости с постепенным подъемом (благодаря естественной суточной миграции) к поверхности - поиск корма и т.д., скопление рыб - ОЛ (2) попадает во вторую новую зону облова ПОЛ (2) и происходит новый (третий) лов рыб в ней: застревание рыб в ячеях и их запутывание в сетном полотне. Однако через некоторое время в процессе естественной суточной миграции основная масса скопления рыб выходит из второй новой зоны облова - поднимается выше горизонтальной сети (12) ПОЛ (2) и продолжает движения в горизонтальной плоскости с постепенным подъемом к поверхности - поиск корма.
По аналогии с изложенным выше, с РПС (1), определив, что основное скопление рыб - ОЛ (3) поднялось на 1-1,5 высоты горизонтальной сети (12), с помощью КМ (5) дают гидроакустическую кодированную команду управления для срабатывания механических замков (31) ВПМ (19) и освобождения запасов вертикального рабочего фала из идентичных друг другу верхних контейнеров (17), размещенных с двух сторон горизонтальной сети (12) и выше ее. Для этого РПС (1) снова ложится в дрейф и с его борта опускают блок (10) КМ (5) на глубину как минимум на 5-10 м ниже киля РПС (1). Затем, в последовательно электрически соединенных блоках (8) и (9), осуществляют набор и усиление до необходимого уровня гидроакустического кодированного сигнала синхронизации FC, а также его последующее, направленное в сторону ВПМ (19) излучение, с помощью блока (10) КМ (5).
В идентичных друг другу блоках приема (25) и усиления (26), а также в идентичных друг другу дешифраторах (29) каждого из двух ВПМ (19), осуществляют прием, усиление и дешифрацию принятых гидроакустических кодированных сигналов синхронизации FC. В случае совпадения установленного и принятого кодов, электронные блоки всех ВПМ (19) синхронизируются и переводятся в режим ожидания приема соответствующего им гидроакустического кодированного сигнала управления. Затем в последовательно электрически соединенных блоках (8) и (9) осуществляют набор и усиление до необходимого уровня гидроакустического кодированного сигнала управления F3, а также его последующее направленное - в сторону ВПМ (19) излучение, с помощью блока (10) КМ (5).
В идентичных друг другу блоках приема (25), усиления (26) и дешифраторах (29) осуществляют прием, усиление и дешифрацию принятых гидроакустических кодированных сигналов управления F3. В случае совпадения установленного и принятого кодов сигналы управления синхронно подаются на электромагниты (30), которые в свою очередь синхронно открывают механические замки (31) ВПМ (19). Под действием положительной плавучести, обеспечивающейся ВПМ (19), из механических замков (31) синхронно освобождаются вставленные ранее в них соединительные кольца (32). После чего из верхних идентичных друг другу контейнеров (17) синхронно выходят соответствующие запасы вертикального рабочего фала (13), и горизонтальная сеть (12) синхронно поднимается на 2-3 своей высоты и занимает третий новый горизонт.
В процессе движения в горизонтальной плоскости с постепенным подъемом (благодаря естественной суточной миграции) к поверхности - поиск корма и т.д., скопление рыб - ОЛ (2) попадает в третью новую зону облова ПОЛ (2), и происходит новый (четвертый) лов рыб в ней: застревание рыб в ячеях и их запутывание в сетном полотне.
Как уже отмечалось ранее, в случае использования информации о типовых горизонтах нахождения рыб по данным многолетних суточных наблюдений или невозможности, по каким-то причинам, подхода РПС (1) к ПОЛ (2), сигнал на срабатывание соответствующих электромагнитов (30) и замков (31) НПМ (18) и ВПМ (19) поступает от соответствующих таймеров (34). При этом с помощью соответствующих высокоемкостных аккумуляторов (33) осуществляется электропитание блоков усиления (26), дешифраторов: (27), (28) и (29), а также электромагнитов (30) и таймеров (34).
После окончания процесса лова рыб данным ПОЛ (2) к одной (например, к западной - при восточном ветре) его оконечности: маркерному бую (21), соединенному при помощи тонкого горизонтального линя (22) с соответствующей вехой (23), на верхней оконечности которой находится проблесковый маяк (24) - при наличии их на поверхности моря, или в расчетную точку - в случае обрыва маркерного буя (21) с вехой (23), всплытия соответствующего ВПМ (19), корпус которого имеет яркую окраску и светоотражающее покрытие (для лучшего визуального поиска), а также специальное радиолокационное покрытие (для лучшего технического поиска), подходит РПС (1) с НРЛС (6).
После обнаружения (визуально или технически) всплывшего на поверхность моря ВПМ (19) осуществляют его подъем на борт РПС (1), а затем, с помощью вертикального рабочего фала (13) и устройства (4) постановки-выборки ПОЛ (2), осуществляют подъем на борт РПС (1) самого ПОЛ (2) с рыбой - ОЛ (3). Затем ПОЛ (2) готовиться к новой постановке, для чего: каждый из НМП (18) и каждый из ВПМ (19) переводят в дежурный режим (режим ожидания приема гидроакустических кодированных сигналов синхронизации и управления) посредством поворота на 90° по часовой стрелке вставленных в соответствующие механические замки (31) соединительных колец (32), а запасы вертикального рабочего фала определенным образом (исключающим запутывание при автоматическом разматывании) размещают в соответствующих нижних (15), средних (16) и верхних (17) контейнерах.
При этом:
1. Высокую продуктивность лова достигают за счет того, что:
- первоначальную постановку ПОЛ осуществляют, используя данные рыбопоискового гидролокатора (эхолота), или многолетних наблюдений, в самую нижнюю часть заданного водного пространства - на горизонт нахождения основной массы рыб в данное время суток с небольшим упреждением;
- производят многократное изменение глубины нахождения ПОЛ, предварительно используя данные рыбопоискового гидролокатора (эхолота), или многолетних наблюдений, на горизонт нахождения основной массы рыб в данное время суток с небольшим упреждением и др.;
- применяют резервное (временное) управление работой всех НПМ и ВПМ за счет использования в каждом из них идентичных таймеров;
- обеспечивают сохранность ПОЛ от хищения со стороны недобросовестных конкурентов посредством соединения ВПМ и маркерных буев тонким вертикальным линем, исключающим, из-за небольшого разрывного усилия, возможность подъема с его помощью на поверхность моря ПОЛ и др;
2. Высокую оперативность лова достигают за счет того, что:
- с РПС осуществляют постановку всего одной горизонтальной сети, а затем многократно, дистанционно или через заданное время, приподнимают ее на новую глубину в соответствии с изменением горизонта нахождения основной массы рыб - ОЛ в процессе их вертикальной миграции;
- одно РПС может одновременно обслуживать несколько ПОЛ. Например, одно ПОЛ управлять дистанционно по гидроакустическому каналу, а другое (другие) ПОЛ - по временному каналу и т.д.
3. Низкие трудовые затраты обеспечивают за счет того, что:
- палубная команда привлекается к работам 2 раза - на одну постановку и выборку ПОЛ, а затем многократно, дистанционно или через заданное время, ПОЛ приподнимают на новую глубину в соответствии с изменением горизонта нахождения основной массы рыб, без участия палубной команды.
Другими словами, вместо 4 постановок-выборок ПОЛ на разные глубины осуществляют всего одну постановку-выборку ПОЛ:
- одно РПС, при тех же трудозатратах палубной команды, может одновременно обслуживать четыре ПОЛ. Например, одним ПОЛ управлять дистанционно по гидроакустическому каналу, а тремя - по временному каналу и т.д.
4. Расширение ареала промысла достигают за счет того, что:
- обеспечивают, благодаря наличию канала автоматического аварийного поиска и подъема на поверхность моря ПОЛ, возможность лова в районах со сложным грунтом, когда в результате зацепов якорей и последующего обрыва вертикальных рабочих фалов обычно теряют ПОЛ и отказываются от промысла в продуктивных районах;
- обеспечивают, благодаря гидроакустическим кодированным сигналам управления, возможность лова в условиях плавающих льдов, когда ПОЛ сразу же поднимают на поверхность моря при образовании (за счет ветра, течения и др.) соответствующей полыньи над ним и т.д.;
5. Расширение области применения достигают за счет того, что:
- обеспечивают, благодаря гидроакустическим кодированным сигналам управления, возможность лова при развитом волнении моря;
- обеспечивают, благодаря гидроакустическим кодированным сигналам управления, возможность лова при интенсивном судоходстве;
- обеспечивают, благодаря гидроакустическим кодированным сигналам управления, возможность лова и сдачи продукции (без подъема части ПОЛ) при активном противоборстве конкурентов и браконьеров (как правило, в очень продуктивном районе промысла) и т.д.
6. Обеспечение экологической безопасности лова (промысла) достигают за счет того, что:
- обеспечивают, благодаря гидроакустическим кодированным сигналам управления, возможность аварийного - после отрыва (ветром, волнением, проходящими судами и др.) маркерных буев, всплытия ПОЛ на поверхность;
- обеспечивают, благодаря временному каналу управления, возможность автоматического всплытия в заданное время ПОЛ на поверхность и т.д.
Отличительными от прототипа признаками заявляемого способа являются:
1. Первоначальную постановку ПОЛ осуществляют в самую нижнюю часть заданного водного пространства - на горизонт нахождения основной массы рыб в данное время суток с небольшим - 1…1,5 высоты сети, упреждением.
2. Перед каждым последующим изменением горизонта нахождения ПОЛ излучают гидроакустические кодированные сигналы синхронизации FC.
3. Первый синхронный подъем ПОЛ осуществляют по первому гидроакустическому кодированному сигналу управления F1, передаваемому с РПС, после подъема основной массы рыб на глубину, превышающую 1-1,5 высоты сети ПОЛ, изменяя глубину нахождения ПОЛ на 2-3 высоты его сети с упреждением, равным 1-1,5 высотам сети.
4. Второй синхронный подъем ПОЛ осуществляют по второму гидроакустическому кодированному сигналу управления F2, передаваемому с РПС, после подъема основной массы рыб на глубину, превышающую 1-1,5 высоты сети ПОЛ, изменяя глубину нахождения ПОЛ на 1,5-2 высоты его сети.
5. Третий синхронный подъем ПОЛ осуществляют по третьему гидроакустическому кодированному сигналу управления F3, передаваемому с РПС, после подъема основной массы рыб на глубину, превышающую 1,5-2 высоты сети ПОЛ, изменяя глубину нахождения ПОЛ на 1-1,5 высоты его сети.
6. Аварийный подъем ПОЛ с любой глубины (в том числе со дна) на поверхность моря осуществляют в любое время или на любом этапе подъема, по третьему гидроакустическому кодированному сигналу управления F3, передаваемому с РПС, а также благодаря третьему запасу вертикального рабочего фала не менее чем на 10% (для учета течения в районе установки ПОЛ) превышающем глубину района установки ПОЛ и размещенному в соответствующих верхних контейнерах.
7. Запасы вертикального рабочего фала в нижних, средних и верхних контейнерах уложены кольцами из «английской удавки», легко распускающимися при разматывании во время всплытия ПОЛ.
8. Для изменения глубины нахождения ПОЛ в процессе вертикальной миграции рыб применяют резервное (временное) управление работой всех НПМ и ВПМ за счет использования в каждом из них идентичных таймеров.
9. На поверхности моря обозначают границы выставленного ранее ПОЛ при помощи двух идентичных друг другу малогабаритных маркерных буев и вех с проблесковыми маяками, установленными с обеих сторон ПОЛ и соединенными с верхними частями соответствующих ВПМ.
10. Обеспечивают сохранность ПОЛ от хищения со стороны недобросовестных конкурентов посредством соединения ВПМ и маркерных буев тонким вертикальным линем, исключающим, из-за небольшого разрывного усилия, возможность подъема с его помощью на поверхность моря ПОЛ.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков показал следующее.
Признаки 3, 4, 5, 6 и 10 являются новыми и неизвестно их использование для лова рыб в процессе их вертикальной миграции.
Признаки 2, 7 и 8 является новыми и неизвестно их использование для лова рыб в процессе их вертикальной миграции. В то же время известно использование: признака 2 - в телеметрии, признака 7 - в мореплавании и рыболовстве, признака 8 - в океанологии.
Признаки 1 и 9 является хорошо известными при лове рыб.
Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - продуктивно (эффективно) и оперативно (быстро) ловить рыб в процессе их вертикальной миграции при минимальных трудовых затратах на неограниченном ареале промысла (скалистый грунт, плавающие льды и др.) с расширением области применения (при развитом волнении моря, интенсивном судоходстве и др.) при обеспечении экологической безопасности (обеспечением автоматического поиска и подъема на поверхность моря с любой глубины, в том числе и со дна) лова.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
Пример реализации способа.
Промысловые испытания разработанного способа проводились на рыбохозяйственном полигоне в бухте Северная (залив Петра Великого, Японское море) в 2001 г., а также в Республике Корея в 2005-2007 гг. В общей сложности было осуществлено 16 постановок ПОЛ, а также 48 дистанционных изменений глубин нахождения горизонтальных сетей, и не зафиксировано не одного случая отказа НПМ и ВПМ. Было также осуществлено 8 постановок ПОЛ, а также 24 автоматических - по временному каналу управления, дистанционных изменений глубин нахождения горизонтальных сетей, и не зафиксировано не одного случая отказа таймеров НПМ и ВПМ.
На фиг.3 и на фиг.4 иллюстрируется внешний вид двухсекционного НПМ, обладающего отрицательной плавучестью, и односекционного ВПМ, обладающего положительной плавучестью, а также КМ, используемых в процессе испытаний разработанного способа лова рыб.
В табл.1 - в соответствующих строках и на фиг.5 - в виде соответствующих гистограмм, представлены средние уловы рыб (кг) при нахождении экспериментального (длина - 50 м, высота - 2,5 м) ПОЛ на одном (гистограмма I), двух (гистограмма II) и трех (гистограмма III) горизонтах в процессе реализации разработанного способа лова рыб в процессе их вертикальной миграции. Испытания разработанного способа проводились в прибрежных районах Республики Корея на одном из рыбопромысловых судов компании «BluWave» (г.Сеул).
Как видно из табл.1 и фиг.5, при нахождении экспериментального ПОЛ на двух горизонтах в течение 12 ч его уловистость возрастает ~ на 350 кг (~ на 70%), а при нахождении на трех горизонтах в течение 18 ч ~ на 750 кг (~ на 150%). При этом следует заметить, что при схеме постановки экспериментального ПОЛ как у способа-прототипа (одна горизонтальная сеть длиной 50 м и шириной 2,5 м, а также две вертикальные сети длиной 50 м и шириной 2,5 м, расположенные по краям горизонтальной сети) уловистость за 18 ч составила 750 кг (выигрыш ~500 кг или ~66,7%), а при типовой схеме постановки экспериментального ПОЛ как у способа-аналога (одна горизонтальная сеть длиной 50 м и шириной 2,5 м) уловистость за 18 ч составила 600 кг (выигрыш ~650 кг или ~108,3%). Однако при реализации способа-прототипа продолжительность процесса постановки-выборки в 4-5 раз превышала продолжительность у разработанного способа и составляла 5-6 ч с привлечением второго РПС. Следует также заметить, что при волнении моря более 2-3 баллов поставить даже экспериментальное (укороченное) ПОЛ не представлялось возможным. Таким образом, преимущества у разработанного способа лова рыб в процессе их вертикальной миграции перед способом-прототипом очевидны. При этом:
1. Высокую продуктивность лова достигали за счет того, что:
- первоначальную постановку ПОЛ осуществляли, используя данные рыбопоискового гидролокатора (эхолота) или многолетних наблюдений, в самую нижнюю часть заданного водного пространства - на горизонт нахождения основной массы рыб в данное время суток с небольшим упреждением;
- производили многократное изменение глубины нахождения ПОЛ, предварительно используя данные рыбопоискового гидролокатора (эхолота), или многолетних наблюдений, на горизонт нахождения основной массы рыб в данное время суток с небольшим упреждением и др.;
- применяли резервное (временное) управление работой всех НПМ и ВПМ за счет использования в каждом из них идентичных таймеров;
- обеспечивали сохранность ПОЛ от хищения со стороны недобросовестных конкурентов посредством соединения ВПМ и маркерных буев тонким вертикальным линем, исключающим, из-за небольшого разрывного усилия, возможность подъема с его помощью на поверхность моря ПОЛ и др.;
2. Высокую оперативность лова достигали за счет того, что:
- с РПС осуществляли постановку всего одной горизонтальной сети, а затем многократно, дистанционно или через заданное время приподнимали ее на новую глубину в соответствии с изменением горизонта нахождения основной массы рыб - ОЛ в процессе их вертикальной миграции;
- одно РПС одновременно обслуживало несколько ПОЛ. Например, одно ПОЛ управлялось дистанционно по гидроакустическому каналу, а другое (другие) ПОЛ - по временному каналу и т.д.
3. Низкие трудовые затраты обеспечивали за счет того, что:
- палубная команда привлекалась к работам 2 раза - на одну постановку и выборку ПОЛ, а затем многократно, дистанционно или через заданное время, ПОЛ приподнимали на новую глубину в соответствии с изменением горизонта нахождения основной массы рыб, без участия палубной команды;
- одно РПС, при тех же трудозатратах палубной команды, могло одновременно обслуживать четыре ПОЛ;
4. Расширение ареала промысла достигали за счет того, что обеспечивали возможность лова в районах со сложным грунтом и т.д.
5. Расширение области применения достигали за счет того, что:
- обеспечивали возможность лова при развитом (более 3-х баллов) волнении моря;
- обеспечивали возможность лова при интенсивном прибрежном судоходстве;
- обеспечивали возможность сдачи продукции при нахождении ПОЛ под водой и т.д.
6. Обеспечение экологической безопасности лова достигнуто благодаря:
- обеспечивали возможность аварийного всплытия ПОЛ на поверхность;
- обеспечивали возможность автоматического всплытия в заданное время ПОЛ на поверхность и т.д.
Литература:
1. Телятник О.В. Технология промысла рыбы. - Владивосток: Дальрыбвтуз, 2000, с.13-17.
2. Мельников В.Н. Устройство орудий лова и технология добычи рыбы. - М.: Агропромиздат, 1991, 384 с.
3. Суточные вертикальные миграции планктоноядных рыб. - Труды ВНИРО. - М.: 1961. - Т.14. - С.177-186.
4. Мамонтов A.M. - Патент РФ №2279217, по заявке №2004130223 от 11.10.2004 г.
5. Бахарев С.А., Бондарь Л.Ф., Норинов Е.И и др. Прогрессивные методы промысла морских биологических объектов. Отчет о НИР «Акватория». - Владивосток. - Дальрыбвтуз, 2000, 198 с.



Изобретение относится к области рыболовства. Способ предусматривает постановку пассивного орудия лова на наибольшую глубину в то время суток, когда там находится основная масса рыбы. Вслед за суточной миграцией основной массы рыбы осуществляют подъем пассивного орудия лова. С рыбопромыслового судна в сторону пассивного орудия лова излучают гидроакустический сигнал, по которому синхронно срабатывают механические замки у подводных модулей, освобождая запасы вертикальных рабочих фалов, за счет чего происходит уменьшение глубины нахождения пассивного орудия лова. Дальнейшие изменения глубины нахождения пассивного орудия лова осуществляют аналогично. Изобретение позволяет дистанционно многократно приподнимать пассивное орудие лова в соответствии с изменением горизонта нахождения основной массы рыбы. 5 ил., 1 табл.
Способ лова рыб в процессе их вертикальной миграции, заключающийся в формировании горизонтального порядка из одной и более сетей - пассивного орудия лова, его установки в заданном водном пространстве, определенном гидроакустическим способом - по данным рыбопоискового средства, или иным способом - по данным многолетних наблюдений в данном районе лова и др., попадании рыб в зону удерживающего действия пассивного орудия лова и удержании рыб в нем, подъеме пассивного орудия лова на поверхность моря и извлечении из него рыб, отличающийся тем, что первоначальную постановку пассивного орудия лова осуществляют в самую нижнюю часть заданного водного пространства - на горизонт нахождения основной массы рыб в данное время суток с небольшим - 1…1,5 высоты сети, упреждением, дополнительно, перед каждым последующим изменением горизонта нахождения пассивного орудия лова, последовательно формируют, усиливают и в сторону пассивного орудия лова излучают гидроакустические кодированные сигналы синхронизации FC - для обеспечения последующего синхронного срабатывания механических замков, а также гидроакустические кодированные сигналы управления Fi работой нижних подводных модулей или верхних подводных модулей - для одновременного срабатывания их механических замков и освобождения соответствующих запасов вертикального рабочего фала, дополнительно осуществляют первый подъем пассивного орудия лова по первому гидроакустическому кодированному сигналу управления F1, передаваемому с рыбопромыслового судна, после подъема основной массы рыб на глубину, превышающую 1-1,5 высоты сети, изменяя глубину нахождения пассивного орудия лова на 2-3 высоты его сети - за счет синхронного срабатывания нижних механических замков у двух нижних подводных модулей и синхронного освобождения первых запасов вертикального рабочего фала, находившихся ранее в нижних контейнерах; второй подъем пассивного орудия лова осуществляют аналогичным образом по второму гидроакустическому кодированному сигналу управления F2 после подъема основной массы рыб на глубину, превышающую 1-1,5 высоты сети, изменяя глубину нахождения пассивного орудия лова на 1,5-2 высоты его сети - за счет синхронного срабатывания верхних механических замков нижних подводных модулей и синхронного освобождения вторых запасов вертикального рабочего фала, находившихся ранее в средних контейнерах; третий подъем пассивного орудия лова осуществляют аналогичным образом по третьему гидроакустическому кодированному сигналу управления F3 после подъема основной массы рыб на глубину, превышающую 1,5-2 высоты сети, изменяя глубину нахождения пассивного орудия лова на 1-1,5 высоты его сети - за счет синхронного срабатывания механических замков верхних подводных модулей и синхронного освобождения необходимых третьих запасов вертикального рабочего фала, находившихся ранее в верхних контейнерах; при этом третьи запасы не менее чем на 10% превышают глубину района и размещены в соответствующих верхних контейнерах определенным образом, обеспечивая возможность аварийного подъема пассивного орудия лова с любой глубины на поверхность моря, дополнительно применяют временное управление работой всех нижних подводных модулей и верхних подводных модулей за счет использования в каждом из них таймеров, обеспечивающего срабатывание их соответствующих механических замков в установленное заранее время, дополнительно на поверхности моря обозначают границы выставленного ранее пассивного орудия лова при помощи двух идентичных друг другу маркерных буев и вех с проблесковыми маяками, установленными с обеих сторон пассивного орудия лова и соединенными с верхними частями соответствующих верхних подводных модулей посредством тонких вертикальных линей, исключающих возможность подъема на поверхность моря пассивного орудия лова с рыбой.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХОДА ТРАЛА И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХОДА ТРАЛА | 2004 |
|
RU2281649C2 |
| RU 95105882 A1, 10.12.1996 | |||
| Устройство для сбора макропланктона | 1981 |
|
SU978799A1 |

