Изобретение относится к области авиационного приборостроения, в частности к автопилотам угла крена летательного аппарата.
Известны автопилоты, обеспечивающие отработку заданного угла крена, описания которых приведены в книге В.А.Боднера "Системы управления летательными аппаратами". - М.: Машиностроение, 1973 г. с.116, в книге А.А.Красовского "Системы автоматического управления полетом и их аналитическое конструирование". - М.: Наука, 1973 г., с.184, в книге И.А.Михалева и др. "Системы автоматического управления самолетом". - М.: Машиностроение, 1987 г., с.210.
Известен автопилот угла крена, реализующий статический закон управления с жесткой обратной связью, содержащий последовательно соединенные задатчик угла крена, первый блок разности, усилитель, второй блок разности и летательный аппарат, датчик угловой скорости крена летательного аппарата последовательно соединен с корректирующей обратной связью, выход которой подключен ко второму входу второго блока разности, датчик угла крена летательного аппарата имеет выход, подключенный ко второму входу первого блока разности [В.А.Боднер "Системы управления летательными аппаратами". - М.: Машиностроение, 1973 г. с.116, рис.3.21]. Недостатком этого автопилота является наличие статической ошибки управления от возмущающего воздействия и зависимость динамической точности управления углом крена от изменения параметров летательного аппарата при изменении режимов полета и внешних условий.
Известен автопилот угла крена, реализующий астатический закон управления с изодромной обратной связью, содержащий последовательно соединенные задатчик угла крена, первый блок разности, усилитель, второй блок разности, изодром и летательный аппарат, датчик угловой скорости крена летательного аппарата последовательно соединен с корректирующей обратной связью, выход которой подключен ко второму входу второго блока разности, датчик угла крена летательного аппарата имеет выход, подключенный ко второму входу первого блока разности [А.А.Красовский "Системы автоматического управления полетом и их аналитическое конструирование". - М.: Наука, 1973 г., с.184, рис.5.5]. Недостатком этого автопилота является зависимость динамической точности управления углом крена от изменения параметров летательного аппарата при изменении режимов полета и внешних условий.
В качестве прототипа принимается автопилот угла крена, реализующий астатический закон управления со скоростной обратной связью, описанный в книге В.А.Боднера "Системы управления летательными аппаратами". - М.: Машиностроение, 1973 г. на с.116 рис.3.22, содержащий последовательно соединенные задатчик угла крена, первый блок разности, первый усилитель, второй блок разности, при этом сервопривод имеет выход для формирования сигнала отклонения элеронов летательного аппарата, датчик угловой скорости крена летательного аппарата последовательно соединен с корректирующей обратной связью, выход которой подключен ко второму входу второго блока разности, датчик угла крена летательного аппарата имеет выход, подключенный ко второму входу первого блока разности.
Этот автопилот исключает наличие статической ошибки управления от возмущающего воздействия, но не позволяет обеспечить требуемую динамическую точность управления углом крена при изменении режимов полета и внешних условий.
Задачей, на решение которой направлено заявляемое изобретение, является обеспечение требуемой динамической точности управления углом крена в широком диапазоне изменения параметров летательного аппарата за счет введения в структуру автопилота комбинированного контура самонастройки.
Поставленная задача достигается тем, что в автопилот для контролирования угла крена летательного аппарата, содержащий последовательно соединенные задатчик угла крена, первый блок разности, первый усилитель и второй блок разности, при этом сервопривод имеет выход для формирования сигнала отклонения элеронов летательного аппарата, датчик угловой скорости крена летательного аппарата последовательно соединен с корректирующей обратной связью, выход которой подключен ко второму входу второго блока разности, датчик угла крена летательного аппарата имеет выход, подключенный ко второму входу первого блока разности, в отличие от прототипа дополнительно введены последовательно соединенные эталонная модель, к входу которой подключен выход второго блока разности, третий блок разности, ко второму входу которого подключен выход датчика угловой скорости, дифференциатор, второй усилитель, блок суммирования, к первому входу которого подключен выход второго блока разности, и первый блок умножения, ко второму входу которого подключен выход интегратора, причем ко входу интегратора подключен выход второго блока умножения, к первому и второму входам которого подключены соответственно выход второго блока разности и выход дифференциатора.
Существо изобретения поясняется чертежами.
На фиг.1 представлена структурная схема заявляемого автопилота.
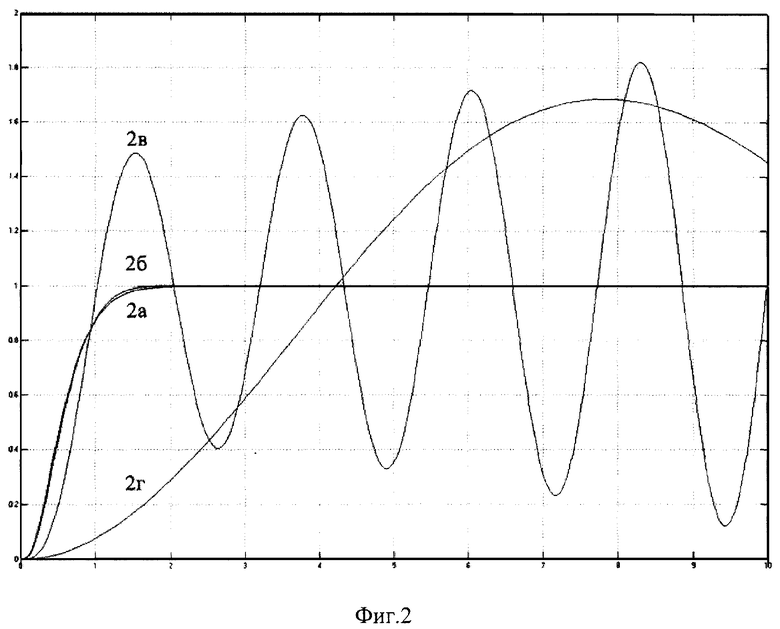
На фиг.2 представлены результаты моделирования переходных процессов: 2а - график переходного процесса в автопилоте-прототипе при номинальных параметрах летательного аппарата, 2б - график переходного процесса в заявляемом автопилоте при отклонении параметров летательного аппарата, 2в и 2г - графики переходного процесса в автопилоте-прототипе при отклонении параметров летательного аппарата.
Адаптивный автопилот для контролирования угла крена летательного аппарата, содержащий последовательно соединенные задатчик угла крена 1, первый блок разности 2, первый усилитель 3 и второй блок разности 4, при этом сервопривод 5 имеет выход для формирования сигнала отклонения элеронов летательного аппарата 6, датчик угловой скорости крена 7 летательного аппарата 6 последовательно соединен с корректирующей обратной связью 8, выход которой подключен ко второму входу второго блока разности 4, датчик угла крена 9 летательного аппарата 6 имеет выход, подключенный ко второму входу первого блока разности 2, последовательно соединенные эталонная модель 10, к входу которой подключен выход второго блока разности 4, третий блок разности 11, ко второму входу которого подключен выход датчика угловой скорости 7, дифференциатор 12, второй усилитель 13, блок суммирования 14, к первому входу которого подключен выход второго блока разности 4, и первый блок умножения 15, ко второму входу которого подключен выход интегратора 16, причем ко входу интегратора 16 подключен выход второго блока умножения 17, к первому и второму входам которого подключены соответственно выход второго блока разности 4 и выход дифференциатора 12.
Адаптивный автопилот угла крена работает следующим образом.
Сигнал заданного угла крена γЗ с выхода задатчика угла крена 1 поступает на первый вход первого блока разности 2, на второй вход которого поступает сигнал текущего угла крена γ с выхода датчика угла крена 9 летательного аппарата 6. На выходе первого блока разности 2 формируется сигнал разности Δγ=γЗ-γ, поступающий на вход первого усилителя 3 с коэффициентом передачи kγ. С входа первого усилителя сигнал kγ·Δγ поступает на первый вход второго блока разности 4. На второй вход второго блока разности 4 поступает сигнал с выхода корректирующей обратной связи 8, имеющей передаточную функцию  . На вход корректирующей обратной связи 8 с выхода датчика угловой скорости крена 7 поступает сигнал текущей угловой скорости крена
. На вход корректирующей обратной связи 8 с выхода датчика угловой скорости крена 7 поступает сигнал текущей угловой скорости крена  летательного аппарата 6.
летательного аппарата 6.
С выхода второго блока разности 4 сигнал g поступает на вход эталонной модели 10. С выхода эталонной модели 10 сигнал поступает на первый вход третьего блока разности 11, на второй вход которого поступает сигнал с выхода датчика угловой скорости 7. Сигнал разности ε с выхода третьего блока разности 11 поступает на вход дифференциатора 12. Далее сигнал  (где ky - коэффициент передачи дифференциатора) с выхода дифференциатора 12 поступает на вход второго усилителя 13, имеющего коэффициент передачи χ, и на второй вход второго блока умножения 17. С выхода второго усилителя 13 сигнал
(где ky - коэффициент передачи дифференциатора) с выхода дифференциатора 12 поступает на вход второго усилителя 13, имеющего коэффициент передачи χ, и на второй вход второго блока умножения 17. С выхода второго усилителя 13 сигнал  поступает на второй вход блока суммирования 14, на первый вход которого поступает сигнал g с выхода второго блока разности 4.
поступает на второй вход блока суммирования 14, на первый вход которого поступает сигнал g с выхода второго блока разности 4.
На первый вход второго блока умножения 17 поступает сигнал g с выхода второго блока разности 4. Сформированный на выходе второго блока умножения 17 сигнал произведения  поступает на вход интегратора 16. Сигнал с выхода интегратора 16 поступает на второй вход первого блока умножения 15, где перемножается с сигналом суммы х=g+z, сформированным на выходе блока суммирования 14.
поступает на вход интегратора 16. Сигнал с выхода интегратора 16 поступает на второй вход первого блока умножения 15, где перемножается с сигналом суммы х=g+z, сформированным на выходе блока суммирования 14.
С выхода первого блока умножения 15 сигнал поступает на вход сервопривода 5, на выходе которого формируется сигнал отклонения элеронов δЭ летательного аппарата 6.
Компенсация динамической погрешности, вызванной изменением параметров летательного аппарата, в приведенной системе достигается за счет введения в ее структуру комбинированного контура самонастройки с эталонной моделью.
Приведем синтез комбинированного контура самонастройки.
Уравнение, описывающее динамические свойства объекта управления, то есть летательного аппарата, представляется в следующем виде:

где γ - сигнал текущего угла крена летательного аппарата, поступающий с выхода датчика угла 9;
δЭ - сигнал отклонения элеронов летательного аппарата, поступающий с выхода сервопривода 5;
a(t), k(t) - параметры летательного аппарата 6, изменяющиеся во времени при изменении режима полета и внешних условий.
Для синтеза комбинированного контура самонастройки выбираем часть системы, которая описывается уравнением

где - сигнал угловой скорости крена летательного аппарата, поступающий с выхода датчика угловой скорости 7;
kCx - сигнал на входе сервопривода 5;
kC - перестраиваемый коэффициент усиления.
Модель выбирается из условия обеспечения заданного качества переходного процесса и представляет собой динамическое звено вида:

где kМ, b - параметры эталонной модели 10;
 - сигнал на выходе эталонной модели 10.
- сигнал на выходе эталонной модели 10.
В соответствии с (2) и (3) составляется уравнение ошибки:

где ε - сигнал ошибки, формируемый на выходе третьего блока разности 11;

μ - положительная постоянная.
Синтез структуры комбинированного контура самонастройки производится на основе прямого метода Ляпунова, что позволяет выявить достаточные условия устойчивости системы [Громыко В.Д. и Санковский Е.А. "Самонастраивающиеся системы с моделью". - М.: Энергия, 1974. с.32]. Функция Ляпунова выбирается в виде квадратичной формы фазовых координат и коэффициента ξ:

где λ, χ - положительные постоянные;

Производная функции Ляпунова имеет вид:

Рассмотрим два последних слагаемых в правой части равенства (8):

Как следует из уравнения (9), производная функции Ляпунова (8) будет неположительной, если выполнить два условия:


Знак выражения (12) будет определяться знаком х, если

Поскольку x=g+z, то можно записать



где 
Реализация системы упрощается, если представить (12) в виде

где  - коэффициент передачи дифференциатора 12;
- коэффициент передачи дифференциатора 12;
χ - коэффициент передачи второго усилителя 13.
Выражение (15) определяет работу контура сигнальной настройки.
Уравнение (11) определяет работу контура настройки коэффициента усиления системы
С другой стороны, в силу (7) при квазистационарном изменении коэффициента усиления k(t) следует:

Приравнивая (16) и (17), получим:

где  коэффициент передачи интегратора 16.
коэффициент передачи интегратора 16.
Следовательно:
Для упрощения технической реализации заменим в (19) множитель χ на ky, при условии что ky≥χ.
Получим выражение, определяющее работу контура параметрической настройки:
Результаты синтеза подтверждаются результатами моделирования переходных процессов в заявляемом адаптивном автопилоте угла крена, представленными на фиг.2. Переходные процессы 2в и 2г, полученные при крайних значениях параметров летательного аппарата, в автопилоте прототипе являются не удовлетворительными, а переходной процесс 2б, полученный при тех же условиях, в заявляемом автопилоте удовлетворяет требуемой динамической точности управления углом крена.
Итак, заявляемое изобретение позволяет благодаря введению в структуру автопилота комбинированного контура самонастройки обеспечивать требуемую динамическую точность управления углом крена в широком диапазоне изменения параметров летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА СО СТАТИЧЕСКИМ АВТОПИЛОТОМ И С ОГРАНИЧЕНИЕМ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2695474C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2701628C2 |
| ПОМЕХОУСТОЙЧИВАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2737872C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КУРСА И ОГРАНИЧЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2681817C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2430858C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО УГЛУ КРЕНА | 2018 |
|
RU2691510C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КУРСА И ОГРАНИЧЕНИЯ НОРМАЛЬНОЙ ПЕРЕГРУЗКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2503585C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2262730C1 |
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
Изобретение относится к авиационному приборостроению и касается создания автопилотов угла крена летательного аппарата. Адаптивный автопилот для контролирования угла крена летательного аппарата имеет последовательно соединенные задатчик угла крена, первый блок разности, первый усилитель и второй блок разности, при этом сервопривод имеет выход для формирования сигнала отклонения элеронов летательного аппарата, датчик угловой скорости крена летательного аппарата последовательно соединен с корректирующей обратной связью, выход которой подключен ко второму входу второго блока разности, датчик угла крена летательного аппарата имеет выход, подключенный ко второму входу первого блока разности. В адаптивный автопилот угла крена дополнительно введены последовательно соединенные эталонная модель, к входу которой подключен выход второго блока разности, третий блок разности, ко второму входу которого подключен выход датчика угловой скорости, дифференциатор, второй усилитель, блок суммирования, к первому входу которого подключен выход второго блока разности, и первый блок умножения, ко второму входу которого подключен выход интегратора, причем ко входу интегратора подключен выход второго блока умножения, к первому и второму входам которого подключены соответственно выход второго блока разности и выход дифференциатора. Технический результат заключается в обеспечении требуемой динамической точности управления углом крена в широком диапазоне изменения параметров летательного аппарата посредством введения в структуру автопилота комбинированного контура настройки. 2 ил.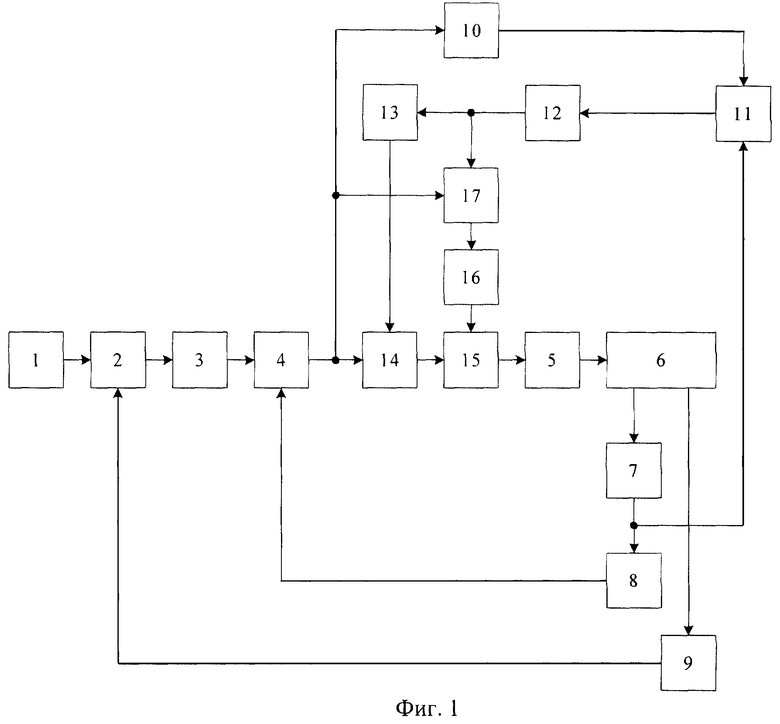
Адаптивный автопилот для контролирования угла крена летательного аппарата, содержащий последовательно соединенные задатчик угла крена, первый блок разности, первый усилитель и второй блок разности, при этом сервопривод имеет выход для формирования сигнала отклонения элеронов летательного аппарата, датчик угловой скорости крена летательного аппарата последовательно соединен с корректирующей обратной связью, выход которой подключен ко второму входу второго блока разности, датчик угла крена летательного аппарата имеет выход, подключенный ко второму входу первого блока разности, отличающийся тем, что в него дополнительно введены последовательно соединенные эталонная модель, к входу которой подключен выход второго блока разности, третий блок разности, ко второму входу которого подключен выход датчика угловой скорости, дифференциатор, второй усилитель, блок суммирования, к первому входу которого подключен выход второго блока разности, и первый блок умножения, ко второму входу которого подключен выход интегратора, причем ко входу интегратора подключен выход второго блока умножения, к первому и второму входам которого подключены соответственно выход второго блока разности и выход дифференциатора.
| В.А.Боднер | |||
| Системы управления летательными аппаратами | |||
| М., "Машиностроение", 1973, с.116, рис.3.22 | |||
| Автопилот | 1990 |
|
SU1802357A1 |
| US 5062583 A, 05.11.1991. | |||

