Изобретение относится к области систем автоматического управления (САУ) углом крена летательного аппарата (ЛА).
Известны САУ, обеспечивающие отработку заданного угла крена ЛА с помощью автопилота, воздействующего на угол отклонения элеронов ЛА [Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр. 116, рис. 3.22], [Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973. - 560 с. Стр. 184, рис. 5.5], [Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - с. 240. Стр. 212, рис. 15.2].
Эти САУ обеспечивают необходимые статические и динамические характеристики канала управления углом крена ЛА. Однако они не позволяют ограничить максимальное значение угловой скорости крена ЛА.
Как известно, интенсивное вращение по крену (ωx≠0) приводит за счет аэроинерционного взаимодействия продольного и бокового движения к уменьшению степени устойчивости самолета на малых и умеренных углах атаки. При достаточно больших, так называемых критических угловых скоростях крена ωxкр, устойчивость теряется и развивается движение с резким изменением углов атаки и скольжения, большой амплитудой перегрузки, действующей на самолет, и нарастанием самой угловой скорости ωх. Эта форма движения называется аэроинерционным вращением и характерна для скоростных самолетов. Для предотвращения выхода на аэроинерционное самовращение в полете ограничивают допустимые угловые скорости ωхд. [Аэромеханика самолета: Динамика полета / Под ред. А. Ф. Бочкарева и В.В. Андриевского. - М.: Машиностроение, 1985. - 360 с. Стр. 343-344].
Наиболее близкой по достигаемому техническому результату, выбранной в качестве прототипа, принимается система автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата, содержащая последовательно соединенные задатчик угла крена и вычислитель автопилота угла крена, сервопривод, выходной сигнал которого определяет угол отклонения элеронов летательного аппарата, датчик угла крена летательного аппарата, имеющий выход, подключенный ко второму входу вычислителя автопилота угла крена, датчик угловой скорости крена летательного аппарата, имеющий выход, подключенный к третьему входу вычислителя автопилота угла крена. Кроме того, система содержит последовательно соединенные задатчик максимальной угловой скорости крена, вычислитель автомата ограничения угловой скорости крена и алгебраический селектор максимального сигнала, выход которого подключен к входу сервопривода, а второй вход вычислителя автомата ограничения угловой скорости крена соединен с выходом датчика угловой скорости крена, выход вычислителя автопилота угла крена подключен ко второму входу алгебраического селектора максимального сигнала. [Патент РФ №2430858 на изобретение: МПК 8 В64С 13/18, G05D 1/08. Система автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата / В.И. Петунин, Э.Ю. Абдуллина, В.Н. Ефанов. - Заявка №2010107596/11; Заявл. 02.03.2010; Зарегистр. в Государственном реестре изобретений РФ 10.10.2011. Бюл. №28].
Эта САУ за счет астатизма каналов управления и ограничения обеспечивает хорошую точность поддержания заданного значения угла крена и ограничения угловой скорости крена. Причем астатизм канала ограничения угловой скорости обеспечивается за счет астатического сервопривода со скоростной обратной связью канала управления углом крена. Однако управление угловыми параметрами ЛА часто осуществляется с помощью статических автопилотов с жесткой обратной связью в сервоприводе соответствующего руля управления ЛА. Это приводит к статическому закону канала ограничения, что недопустимо с точки зрения обеспечения точности ограничения угловой скорости крена, так как каналы управления и ограничения имеют общую исполнительную часть.
Задачей, на решение которой направлено заявляемое изобретение, является обеспечение надежности ограничения угловой скорости крена и сохранение нормальной эксплуатации летательного аппарата при управлении углом крена ЛА со статическим автопилотом в канале крена.
Техническим результатом является обеспечение необходимой точности ограничения угловой скорости крена за счет того, что в систему автоматического управления углом крена со статическим автопилотом вводится управляемый интегратор, обеспечивающий при включении канала ограничения астатический закон ограничения угловой скорости крена.
Поставленная задача решается, а технический результат достигается тем, что в систему автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата, содержащую задатчик угла крена, последовательно соединенные задатчик максимальной угловой скорости крена и вычислитель автомата ограничения угловой скорости крена, датчик угла крена летательного аппарата, датчик угловой скорости крена летательного аппарата, выход которого соединен со вторым входом вычислителя автомата ограничения угловой скорости крена, алгебраический селектор, в отличие от прототипа дополнительно введены вычислитель статического автопилота угла крена, первый вход которого соединен с выходом задатчика угла крена, второй вход соединен с выходом датчика угла крена, третий вход соединен с выходом датчика угловой скорости крена, а выход соединен с входами логического устройства и алгебраического селектора, причем вторые входы логического устройства и алгебраического селектора соединены с выходом вычислителя автомата ограничения угловой скорости крена, последовательно соединенные управляемый интегратор и статический сервопривод элеронов летательного аппарата, причем вход управляемого интегратора соединен с выходом алгебраического селектора, первый умножитель, входы которого соединены с выходами логического устройства и алгебраического селектора, а выход соединен с входом начального значения управляемого интегратора, вход сброса управляемого интегратора соединен с выходом логического устройства.
Кроме того, в системе автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата управляемый интегратор может содержать последовательно соединенные второй умножитель, элемент сравнения, интегратор, третий умножитель и сумматор, причем выход интегратора через последовательно соединенные пропорциональное звено и четвертый умножитель соединен со вторым входом элемента сравнения, входом управляемого интегратора является первый вход второго умножителя, а выходом - выход сумматора, вход сброса управляемого интегратора соединен со вторым входом четвертого умножителя и через первый и второй элементы отрицания, соответственно, со вторыми входами второго и третьего умножителей, вход начального значения управляемого интегратора соединен со вторым входом сумматора.
Существо изобретения поясняется чертежами.
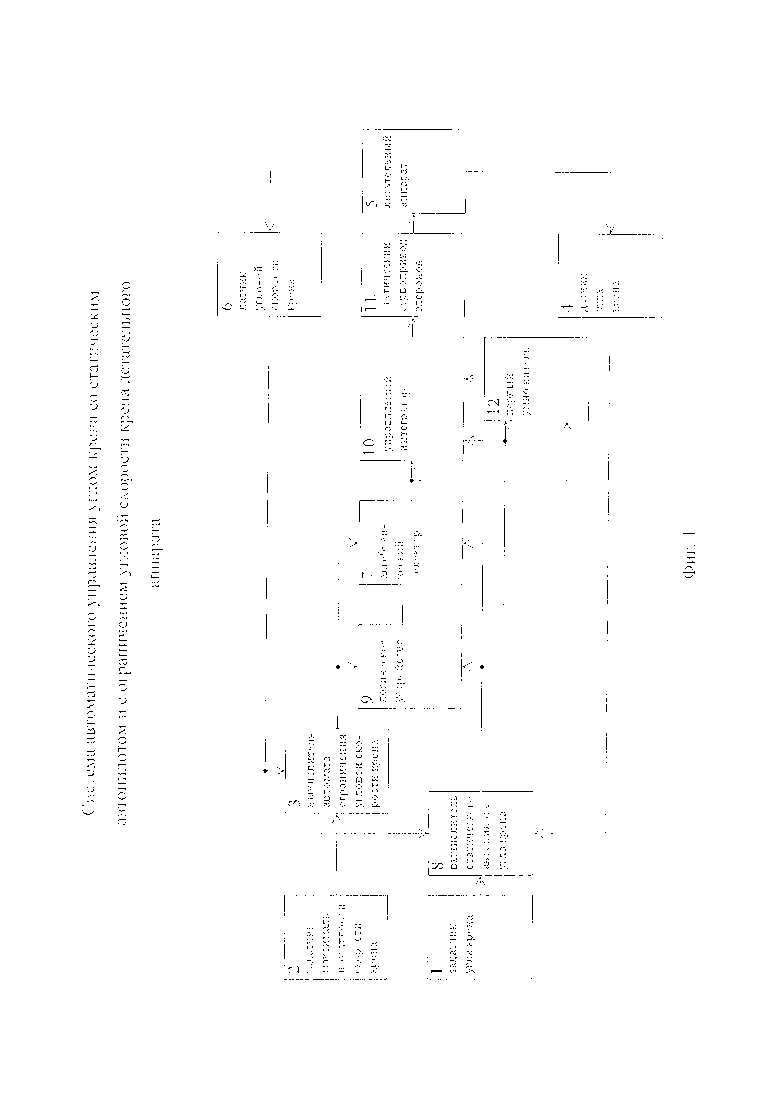
На фиг. 1 представлена структурная схема заявляемой системы автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата.
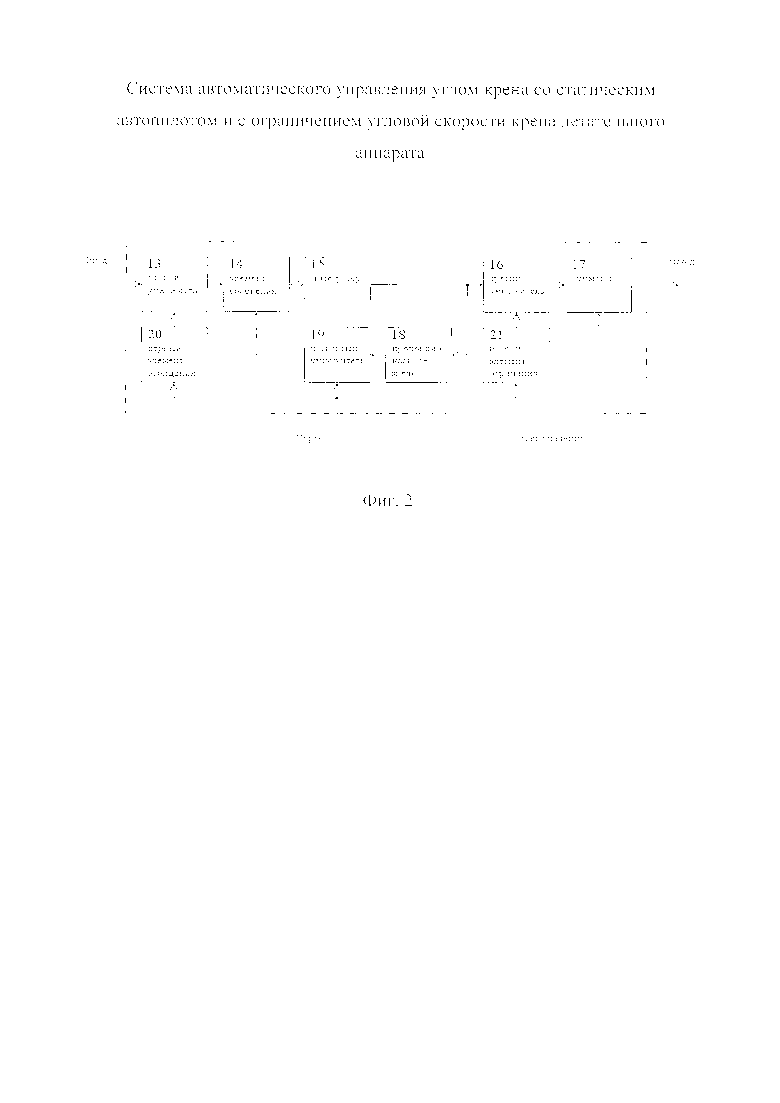
На фиг. 2 представлена структурная схема управляемого интегратора.
На фиг. 3 представлены результаты моделирования переходных процессов по углу крена γ и угловой скорости крена ωх в предлагаемой САУ.
Система автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата, содержащая задатчик угла крена 1, последовательно соединенные задатчик максимальной угловой скорости крена 2 и вычислитель автомата ограничения угловой скорости крена 3, датчик угла крена 4 летательного аппарата 5, датчик угловой скорости крена 6 летательного аппарата 5, выход которого соединен со вторым входом вычислителя автомата ограничения угловой скорости крена 3, алгебраический селектор 7, отличающаяся тем, что дополнительно содержит вычислитель статического автопилота угла крена 8, первый вход которого соединен с выходом задатчика угла крена 1, второй вход соединен с выходом датчика угла крена 4, третий вход соединен с выходом датчика угловой скорости крена 6, а выход соединен с входами логического устройства 9 и алгебраического селектора 7, причем вторые входы логического устройства 9 и алгебраического селектора 7 соединены с выходом вычислителя автомата ограничения угловой скорости крена 3, последовательно соединенные управляемый интегратор 10 и статический сервопривод элеронов 11 летательного аппарата 5, причем вход управляемого интегратора соединен с выходом алгебраического селектора 7, первый умножитель 12, входы которого соединены с выходами логического устройства 9 и алгебраического селектора 7, а выход соединен с входом начального значения управляемого интегратора 10, вход сброса управляемого интегратора 10 соединен с выходом логического устройства 9.
Управляемый интегратор 10 содержит последовательно соединенные второй умножитель 13, элемент сравнения 14, интегратор 15, третий умножитель 16 и сумматор 17, причем выход интегратора через последовательно соединенные пропорциональное звено 18 и четвертый умножитель 19 соединен со вторым входом элемента сравнения 14, входом управляемого интегратора 10 является первый вход второго умножителя 13, а выходом - выход сумматора 17, вход сброса управляемого интегратора 10 соединен со вторым входом четвертого умножителя 19 и через первый 20 и второй 21 элементы отрицания, соответственно, со вторыми входами второго 13 и третьего 16 умножителей, вход начального значения управляемого интегратора 10 соединен со вторым входом сумматора 17.
Точность ограничения угловой скорости крена в приведенной системе достигается за счет введения в ее структуру логического устройства 9, первого умножителя 12 и управляемого интегратора 10.
Система автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата работает следующим образом.
Сигнал заданного угла крена γзад с выхода задатчика угла крена 1 поступает на первый вход вычислителя статического автопилота угла крена 8, на второй вход которого поступает сигнал текущего значения угла крена γ с выхода датчика угла крена 4, а на третий вход - сигнал текущего значения угловой скорости крена ωх=рγ с выхода датчика угловой скорости крена 6.
Здесь p=d/dt. На выходе вычислителя статического автопилота угла крена 8 формируется сигнал

поступающий на первый вход алгебраического селектора 7. Здесь kγ;  ; -
; -
передаточные числа автопилота.
Сигнал заданной максимальной угловой скорости крена ωx max с выхода задатчика максимальной угловой скорости крена 2 поступает на первый вход вычислителя автомата ограничения угловой скорости крена 3, на второй вход которого поступает сигнал текущего значения угловой скорости крена ωх с выхода датчика угловой скорости крена 6. На выходе вычислителя автомата ограничения угловой скорости крена 3 формируется сигнал

поступающий на второй вход алгебраического селектора 7. Здесь kω;  - передаточные числа автомата ограничения.
- передаточные числа автомата ограничения.
Для построения САУ с ограничением параметров ЛА используются логические устройства, реализующие алгоритмы алгебраического селектирования каналов. Обычно применяется принцип селектирования, согласно которому регулируется параметр многомерного объекта управления, наиболее приблизившийся к величине, определяемой программой управления [Петунин В.И. Синтез систем автоматического управления летательными аппаратами с автоматами ограничений предельных параметров // Изв. вузов. Приборостроение. 2010. Том 53. №10. - С. 18-24.].
Для того чтобы регулируемые параметры не превысили максимальных допустимых значений (ограничение сверху), селектор должен пропустить на управление сигнал, соответствующий получению минимальной величины управляющего сигнала. Такое селектирование называют селектированием по минимуму, а селектор - селектором минимальных сигналов управления.
Если же ограничивают минимальные значения параметров (ограничение снизу), то предпочтение отдается регулятору параметра, для поддержания которого требуется наибольший управляющий сигнал, т.е. осуществляется селектирование по максимуму. В этом случае используют селектор максимальных сигналов управления.
Селекторы вводятся в САУ для плавного переключения каналов управления и обеспечивают во всех условиях работы управляющее воздействие только одного из нескольких каналов управления, включаемых в работу в зависимости от режима работы объекта управления. При этом каждый из каналов управления работает автономно и его параметры обычно выбираются без учета взаимодействия с другими каналами. Это позволяет сохранить статическую точность и запасы устойчивости, свойственные отдельным каналам управления.
Следовательно, алгебраический селектор обеспечивает плавное переключение с одного канала на другой, например, с автопилота на автомат ограничения и обратно на автопилот.
В рассматриваемой системе используется селектор минимальных сигналов управления. В отличие от прототипа знак коэффициента передачи объекта управления - летательного аппарата 5 здесь не учитывается.
Выходной сигнал алгебраического селектора 7
U=min(U1, U2)
поступает на вход управляемого интегратора 10.
Включение управляемого интегратора 10 в канал ограничения угловой скорости позволяет сделать его астатическим и, соответственно, повысить точность выдерживания максимальной угловой скорости крена.
Однако при работе САУ на режиме управления углом крена управляемый интегратор 10 должен быть выключен, так как он нарушает требуемые динамические характеристики этого канала.
Для этого в САУ вводится логическое устройство 9, выдающее логический сигнал L, определяющий какой из каналов на входе алгебраического селектора 7 включается в работу

При работе канала управления углом крена выходной сигнал L логического устройства 9 подается на вход сброса управляемого интегратора 10, обнуляя его входной и выходной сигналы. Одновременно, логический сигнал L используется для установки начального значения управляемого интегратора 10, изменяя коэффициент передачи первого умножителя 12, через который выходной сигнал алгебраического селектора 7 подается на вход начального значения управляемого интегратора 10. В результате, если L=0, управляемый интегратор 10 безударно включается в САУ, если L=1, то управляемый интегратор 10 выключается из САУ и выходной сигналалгебраического селектора 7 подключается к входу статического сервопривода элеронов 11.
Управляемый интегратор 10 работает следующим образом.
Выходной сигнал управляемого интегратора 10 определяется в сумматоре 17 как сумма выходного сигнала интегратора 15 и сигнала, поступающего на вход начального значения управляемого интегратора 10.
Передаточная функция интегратора 15
Входной сигнал управляемого интегратора 10 поступает на вход интегратора 15 через последовательно соединенные второй умножитель 13 и элемент сравнения 14.
Если L=0, то сигнал сброса управляемого интегратора 10 равен нулю, при этом на управляющие входы второго 13 и третьего 16 умножителей через элементы отрицания 20 и 21 поступают сигналы, равные единице, а на управляющий вход четвертого умножителя 19 - сигнал, равный нулю. При этом входной сигнал управляемого интегратора 10 поступает на вход интегратора 15, выходной сигнал которого поступает на выход управляемого интегратора 10, так как на втором входе сумматора 17 сигнал начального значения управляемого интегратора 10 равен нулю. Таким образом, интегратор 15 включается в САУ.
Если L=1, то сигнал сброса управляемого интегратора 10 равен единице, при этом на управляющие входы второго 13 и третьего 16 умножителей через элементы отрицания 20 и 21 поступают сигналы, равные нулю, а на управляющий вход четвертого умножителя 19 - сигнал, равный единице. При этом интегратор 15 охватывается через последовательно соединенные пропорциональное звено 18 и четвертый умножитель 19 жесткой отрицательной обратной связью, то есть становится статическим инерционным звеном Wсз(p) и отключается от входа и выхода управляемого интегратора 10 
где Wпз(p)=Kпз - передаточная функция пропорционального звена 18. Это позволяет избежать неконтролируемого изменения выходного сигнала интегратора 15. Таким образом, интегратор 15 выключается из САУ, а выходной сигнал управляемого интегратора 10 становится равным выходному сигналу алгебраического селектора 7 за счет прохождения сигнала алгебраического селектора 7 через первый умножитель 12 и вход начального значения управляемого интегратора 10.
Выходной сигнал управляемого интегратора 10 поступает на вход статического сервопривода элеронов 11 с передаточной функцией
Wсп(p)=1,
изменяющего угол отклонения элеронов δэ летательного аппарата 5.
При этом происходит изменение угла крена ЛА γ и требуемое ограничение угловой скорости крена ωх.
Следовательно, в заявляемой системе автоматического управления реализуется закон управления статического автопилота угла крена
 у
у
и закон управления астатического автомата ограничения угловой скорости крена
 .
.
Приведем синтез системы автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата.
Аналитический синтез передаточных чисел автопилота и автомата ограничения с учетом заданного качества САУ удобно производить с помощью метода стандартных переходных характеристик [Петунин В.И. Синтез законов управления канала тангажа автопилота // Вестник УГАТУ, серия «Управление, вычислительная техника и информатика». 2007. Том 9, №2 (20). С. 25-31]. При этом должно выполняться равенство передаточных функций исходной Ф(р) и желаемой систем Ф*(р):
Ф(р)=Ф*(р).
Передаточная функция самолета по углу крена γ при управлении элеронами δэ [Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр. 115]:
Закон управления статического автопилота угла крена с жесткой обратной связью:
•
Передаточная функция замкнутой системы по углу крена:
Желаемая передаточная функция замкнутой системы по углу крена:
Тогда передаточные числа автопилота:
 .
.
Передаточная функция самолета по угловой скорости крена ωх при управлении элеронами δэ:
Закон управления автомата ограничения угловой скорости крена:
Передаточная функция замкнутой системы по угловой скорости крена: 
Желаемая передаточная функция замкнутой системы по угловой скорости крена:
Тогда передаточные числа автомата ограничения:
 .
.
Результаты синтеза подтверждаются результатами моделирования переходных процессов в заявляемой системе автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата, представленными на фиг. 3, где задающие воздействия каналов: γзад=1; ωx max=0,5; L - логический сигнал на выходе логического устройства 9. Переходные процессы, полученные в САУ углом крена с помощью статического автопилота и с автоматом ограничения угловой скорости крена являются удовлетворительными, поскольку показывают необходимую точность ограничения ω≤ωx max=0,5 и хорошее качество управления на режимах переключения каналов системы.
Таким образом, заявляемое изобретение позволяет, благодаря введению в структуру системы автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена ЛА логического устройства, первого умножителя и управляемого интегратора, обеспечить необходимую точность ограничения угловой скорости крена и плавные переходные процессы при переключении каналов.

Система автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата содержит задатчик угла крена, задатчик максимальной угловой скорости крена и вычислитель автомата ограничения угловой скорости крена, датчик угла крена летательного аппарата, датчик угловой скорости крена летательного аппарата, алгебраический селектор, вычислитель статического автопилота угла крена, управляемый интегратор, статический сервопривод элеронов летательного аппарата, первый умножитель, логическое устройство, соединенные определенным образом. Управляемый интегратор содержит второй, третий и четвертый умножители, элемент сравнения, интегратор, сумматор, два элемента отрицания, пропорциональное звено, соединенные определенным образом. Обеспечивается повышение точности ограничения угла крена летательного аппарата. 1 з.п. ф-лы, 3 ил.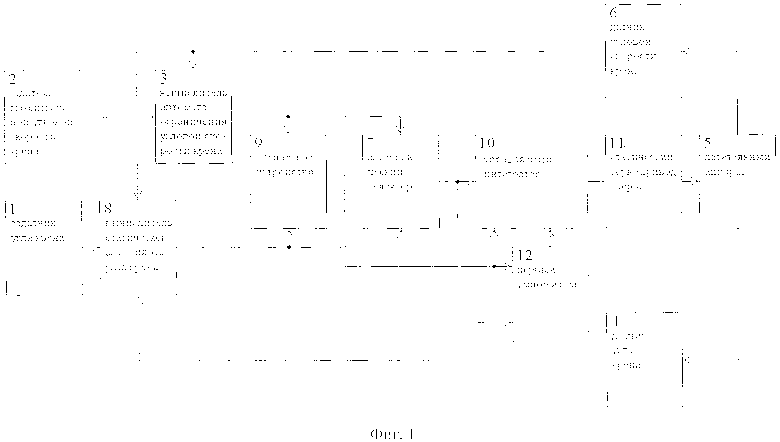
1. Система автоматического управления углом крена со статическим автопилотом и с ограничением угловой скорости крена летательного аппарата, содержащая задатчик угла крена, последовательно соединенные задатчик максимальной угловой скорости крена и вычислитель автомата ограничения угловой скорости крена, датчик угла крена летательного аппарата, датчик угловой скорости крена летательного аппарата, выход которого соединен со вторым входом вычислителя автомата ограничения угловой скорости крена, алгебраический селектор, отличающаяся тем, что дополнительно содержит вычислитель статического автопилота угла крена, первый вход которого соединен с выходом задатчика угла крена, второй вход соединен с выходом датчика угла крена, третий вход соединен с выходом датчика угловой скорости крена, а выход соединен с входами логического устройства и алгебраического селектора, причем вторые входы логического устройства и алгебраического селектора соединены с выходом вычислителя автомата ограничения угловой скорости крена, последовательно соединенные управляемый интегратор и статический сервопривод элеронов летательного аппарата, причем вход управляемого интегратора соединен с выходом алгебраического селектора, первый умножитель, входы которого соединены с выходами логического устройства и алгебраического селектора, а выход соединен с входом начального значения управляемого интегратора, вход сброса управляемого интегратора соединен с выходом логического устройства.
2. Система автоматического управления по п. 1, отличающаяся тем, что управляемый интегратор содержит последовательно соединенные второй умножитель, элемент сравнения, интегратор, третий умножитель и сумматор, причем выход интегратора через последовательно соединенные пропорциональное звено и четвертый умножитель соединен со вторым входом элемента сравнения, входом управляемого интегратора является первый вход второго умножителя, а выходом - выход сумматора, вход сброса управляемого интегратора соединен со вторым входом четвертого умножителя и через первый и второй элементы отрицания соответственно со вторыми входами второго и третьего умножителей, вход начального значения управляемого интегратора соединен со вторым входом сумматора.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2430858C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| Решетчатая арка | 1979 |
|
SU844701A1 |
| US 6556897 B2, 29.04.2003. | |||

