Изобретение относится к области систем автоматического управления (САУ) углом крена летательного аппарата (ЛА).
Известны САУ, обеспечивающие отработку заданного угла крена ЛА с помощью автопилота, воздействующего на угол отклонения элеронов ЛА [Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр. 116, рис. 3.21, 3.22], [Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. - М.: Наука, 1973. - 560 с. Стр. 184, рис. 5.5], [Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. - М.: Машиностроение, 1987. - с. 240. Стр. 212, рис. 15.2].
Эти САУ обеспечивают необходимые статические и динамические характеристики канала управления углом крена ЛА. Однако они не обладают достаточной помехоустойчивостью по отношению к различным возмущениям.
Как известно, полет летательных аппаратов происходит в условиях турбулентности атмосферы, при действии различных ветровых возмущений [Доброленский Ю.П. Динамика полетов в неспокойной атмосфере. - М.: Машиностроение, 1969. - 256 с]. Поэтому важное значение имеет задача повышения помехоустойчивости САУ ЛА к действию подобных возмущений.
Наиболее близкой по достигаемому техническому результату, выбранной в качестве прототипа, принимается система автоматического управления углом крена летательного аппарата, содержащая последовательно соединенные задатчик угла крена, первый элемент сравнения, первое пропорциональное звено, второй элемент сравнения, статический сервопривод элеронов летательного аппарата, датчик угловой скорости крена летательного аппарата и второе пропорциональное звено, выход которого подключен ко второму входу второго элемента сравнения, датчик угла крена летательного аппарата, выход которого подключен ко второму входу первого элемента сравнения, ветровое возмущение, действующее на второй вход летательного аппарата [Рэндел У. Биард, Тимоти У. МакЛэйн. Малые беспилотные летательные аппараты: теория и практика. М.: Техносфера, 2015. - 312 с. С. 112, рис. 6.8].
Эта САУ со статическим автопилотом с жесткой обратной связью за счет астатизма канала по управляющему воздействию обеспечивает хорошую точность поддержания заданного значения угла крена и необходимое качество переходных процессов. Однако по возмущающему воздействию эта система является статической и обладает достаточно большой статической ошибкой при действии ветровых возмущений.
Задачей, на решение которой направлено заявляемое изобретение, является косвенное измерение возмущения на основе выходных параметров объекта управления с использованием его математической модели и компенсация этого возмущения с целью повышения помехоустойчивости САУ.
Техническим результатом является обеспечение необходимой статической точности поддержания угла крена ЛА при действии ступенчатых и случайных ветровых возмущений при сохранении заданного качества переходных процессов за счет того, что в САУ углом крена со статическим автопилотом вводится компенсатор возмущений.
Поставленная задача решается, а технический результат достигается тем, что в помехоустойчивую систему автоматического управления углом крена летательного аппарата, содержащую последовательно соединенные задатчик угла крена, первый элемент сравнения, первое пропорциональное звено и второй элемент сравнения, последовательно соединенные статический сервопривод элеронов летательного аппарата, датчик угловой скорости крена летательного аппарата и второе пропорциональное звено, выход которого подключен ко второму входу второго элемента сравнения, датчик угла крена летательного аппарата, выход которого подключен ко второму входу первого элемента сравнения, ветровое возмущение, действующее на второй вход летательного аппарата, в отличие от прототипа дополнительно введены последовательно соединенные динамическое звено, третий элемент сравнения, третье пропорциональное звено и суммирующий элемент, второй вход которого подключен к выходу второго элемента сравнения, а выход к входу статического сервопривода элеронов летательного аппарата, вход динамического звена подключен к выходу датчика угловой скорости крена летательного аппарата, четвертое пропорциональное звено, вход которого подключен к выходу второго элемента сравнения, а выход ко второму входу третьего элемента сравнения. Существо изобретения поясняется чертежами.
На фиг. 1 представлена структурная схема заявляемой помехоустойчивой системы автоматического управления углом крена.
На фиг. 2 представлена структурная схема компенсатора сигнальных возмущений.
На фиг. 3 представлена структурная схема компенсатора ветровых возмущений с учетом математической модели ЛА по каналу крена.
На фиг. 4 представлены результаты моделирования переходных процессов по углу крена у в предлагаемой САУ.
Помехоустойчивая система автоматического управления углом крена летательного аппарата, содержащая последовательно соединенные задатчик угла крена 1, первый элемент сравнения 2, первое пропорциональное звено 3 и второй элемент сравнения 4, последовательно соединенные статический сервопривод элеронов 5 летательного аппарата 6, датчик угловой скорости крена 7 летательного аппарата 6 и второе пропорциональное звено 8, выход которого подключен ко второму входу второго элемента сравнения 4, датчик угла крена 9 летательного аппарата 6, выход которого подключен ко второму входу первого элемента сравнения 2, ветровое возмущение 10, действующее на второй вход летательного аппарата 6, отличающаяся тем, что дополнительно содержит последовательно соединенные динамическое звено 11, третий элемент сравнения 12, третье пропорциональное звено 13 и суммирующий элемент 14, второй вход которого подключен к выходу второго элемента сравнения 4, а выход к входу статического сервопривода элеронов 5 летательного аппарата 6, вход динамического звена 11 подключен к выходу датчика угловой скорости крена 7 летательного аппарата 6, четвертое пропорциональное звено 15, вход которого подключен к выходу второго элемента сравнения 4, а выход ко второму входу третьего элемента сравнения 12.
Помехоустойчивость канала по углу крена в приведенной системе достигается за счет введения в ее структуру компенсатора возмущений в виде динамического звена 11, третьего элемента сравнения 12, третьего пропорционального звена 13, суммирующего элемента 14 и четвертого пропорционального звена 15.
Помехоустойчивая система автоматического управления углом крена летательного аппарата работает следующим образом.
Сигнал заданного угла крена γзад с выхода задатчика угла крена 1 поступает на вход первого элемента сравнения 2, на второй вход которого поступает сигнал текущего угла крена γ с выхода датчика угла крена 9 летательного аппарата 6. Далее сигнал разности γзад - γ преобразуется первым пропорциональным звеном 3 с коэффициентом передачи kγ и поступает на вход второго элемента сравнения 4, на второй вход которого поступает сигнал угловой скорости угла крена  с выхода датчика угловой скорости 7 летательного аппарата 6, преобразованный вторым пропорциональным звеном 8 с коэффициентом передачи
с выхода датчика угловой скорости 7 летательного аппарата 6, преобразованный вторым пропорциональным звеном 8 с коэффициентом передачи  . На выходе второго элемента сравнения 4 формируется сигнал
. На выходе второго элемента сравнения 4 формируется сигнал

поступающий на первый вход суммирующего элемента 14. Здесь p=d/dt; kγ;  ; - передаточные числа автопилота.
; - передаточные числа автопилота.
Ветровое возмущение 10, действует на второй вход летательного аппарата 6.
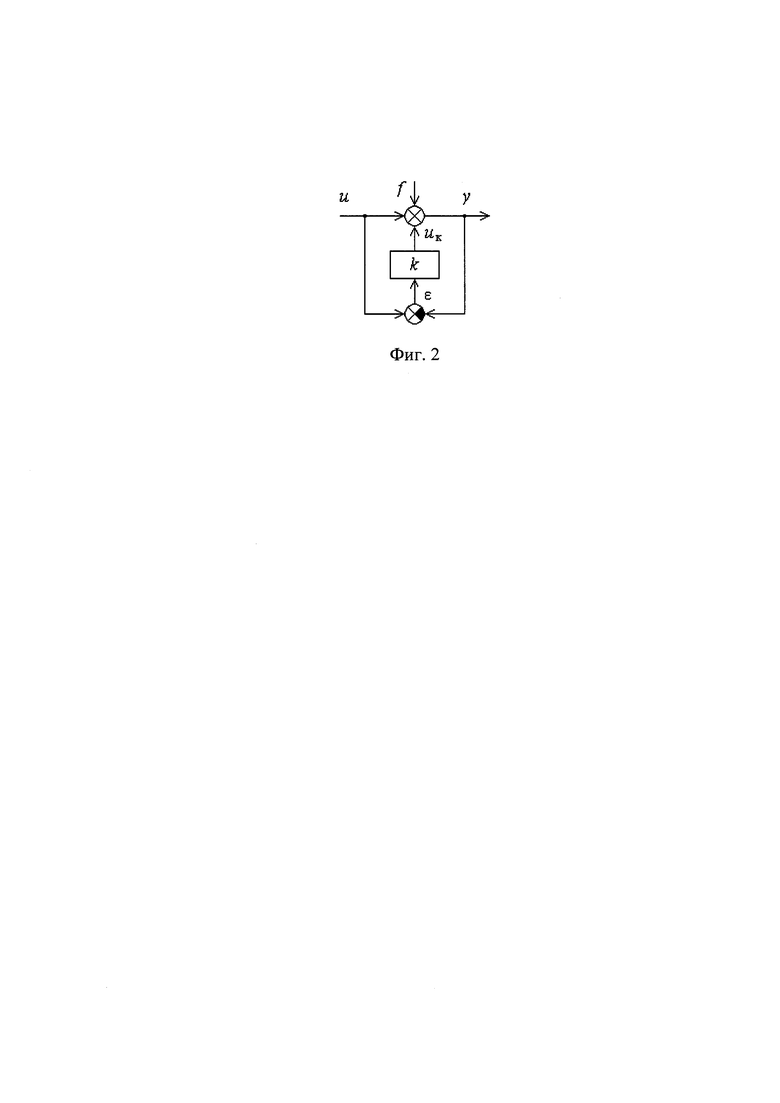
Структурная схема компенсатора сигнальных возмущений f представлена на фиг. 2
Уравнения компенсатора возмущений:

Здесь Wк(p)=k - передаточная функция компенсирующей обратной связи.
Подставляем последовательно в первое уравнение - второе, третье уравнения и преобразуем:

В результате получаем

Если

Следовательно, в таком компенсаторе наилучшие характеристики имеет статическая компенсирующая обратная связь, когда Wк(р)=k, где k имеет достаточно большое значение.
Спектральная плотность возмущения на выходе при этом связана со спектральной плотностью возмущения на входе следующим соотношением

Действие возмущений на летательный аппарат, как объект управления, в угловом движении по каналу крена обычно реализуется в следующем виде [Боднер В.А. Системы управления летательными аппаратами: Учебник для студентов авиационных специальностей вузов. - М: Машиностроение, 1973. - 506 с.]:

Структурная схема ЛА по каналу крена приведена на фиг. 3, где возмущение f=f2.
Здесь

Метод структурных преобразований позволяет получить следующую структурную схему для компенсатора возмущений по угловой скорости крена ЛА, как объекта управления (фиг. 3). Здесь Wк(p)=k. В обратную связь по угловой скорости крена включен фильтр с передаточной функцией, обратной W2(p)

Передаточная функция этой части системы по управляющему воздействию u:

Звено с передаточной функцией  является фильтром высоких частот и может быть учтено при синтезе основного контура САУ.
является фильтром высоких частот и может быть учтено при синтезе основного контура САУ.
Передаточная функция этой части системы по возмущающему воздействию f:

Параметры звена с передаточной функцией  могут быть выбраны с учетом действующих возмущающих воздействий.
могут быть выбраны с учетом действующих возмущающих воздействий.
Следовательно, компенсатор возмущений включает динамическое звено 11, входом которого является выход датчика угловой скорости 7 и четвертое пропорциональное звено 15, подключенное к выходу второго элемента сравнения 4. Выходные сигналы последних звеньев сравниваются в третьем элементе сравнения 12; сигнал ошибки ε умножается на коэффициент k в третьем пропорциональном звене 13 и поступает на второй вход суммирующего элемента 14.
Выходной сигнал суммирующего элемента 14 поступает на вход статического сервопривода элеронов 5 с передаточной функцией изменяющего угол отклонения элеронов δэ летательного аппарата 6.
При этом происходит требуемое изменение угла крена ЛА γ и компенсация ветрового возмущения f.
Следовательно, в заявляемой системе автоматического управления реализуется закон управления статического автопилота угла крена

Приведем синтез системы автоматического управления углом крена и ограничения угловой скорости крена летательного аппарата.
Аналитический синтез передаточных чисел автопилота с учетом заданного качества САУ удобно производить с помощью метода стандартных переходных характеристик [Петунии В. И. Логико-динамические системы с селективным выбором каналов управления авиационными объектами: монография. - М.: «Издательство «Инновационное машиностроение», 2018. - 292 с. С. 244]. При этом должно выполняться равенство передаточных функций исходной Ф(р) и желаемой систем Ф*(p):
Ф(р)=Ф*(р).
Передаточная функция самолета по углу крена у при управлении элеронами δэ [Боднер В.А. Системы управления летательными аппаратами. - М.: Машиностроение, 1973. - 506 с. Стр. 115]:

Закон управления статического автопилота угла крена с жесткой обратной связью:

Передаточная функция замкнутой системы по углу крена:

Желаемая передаточная функция замкнутой системы по углу крена:
Тогда передаточные числа автопилота:

В данную САУ углом крена ЛА (фиг. 1) введен компенсатор возмущений, согласно фиг. 3.
Передаточная функция синтезированной САУ по возмущению:

Для сохранения переходного процесса по задающему сигналу в САУ углом крена ЛА перед сигналом u введено звено с передаточной функцией

Проведенный синтез подтверждается результатами моделирования рассмотренной САУ углом крена у ЛА с помощью пакета Simulink системы Matlab, представленными на фиг. 4.
При этом nэ=90; n22=7,5, что соответствует тяжелому самолету [Боднер В.А. Системы управления летательными аппаратами: Учебник для студентов авиационных специальностей вузов. - М.: Машиностроение, 1973. - 506 с.]; τ=0,01 с; k=100; γ3=1; f=1 при t=3…7; kγ=0,28;  =0,028.
=0,028.
Передаточная функция формирующего фильтра соответствует тяжелому транспортному самолету [Доброленский Ю.П. Динамика полетов в неспокойной атмосфере. - М.: Машиностроение, 1969. - 256 с. С. 239.]

На фиг. 4, а и фиг.4, в приведены переходные процессы в исходной САУ; на фиг. 4, б и фиг. 4, г приведены переходные процессы в САУ с компенсатором возмущений.
Переходные процессы по углу крена γ, полученные при моделировании в САУ с компенсатором возмущений показывают сохранение качества желаемых монотонных процессов: относительное время регулирования на фиг. 4, а - tp=0,943; на фиг. 4, б - tp=0,963 и уменьшение статической ошибки в 100 раз согласно фиг. 4, в и фиг. 4, г при действии ступенчатых возмущений.
Переходные процессы при действии случайных возмущений, приведенные на фиг. 4, д и фиг. 4, е также показывают существенное (в 100 раз) снижение уровня возмущений по углу крена γ.
Таким образом, заявляемое изобретение позволяет, благодаря введению в структуру системы автоматического управления углом крена компенсатора возмущений в виде динамического звена 11, третьего элемента сравнения 12, третьего пропорционального звена 13, суммирующего элемента 14 и четвертого пропорционального звена 15, обеспечить необходимую статическую точность поддержания угла крена ЛА и сохранение заданного качества переходных процессов при действии ступенчатых и случайных ветровых возмущений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА СО СТАТИЧЕСКИМ АВТОПИЛОТОМ И С ОГРАНИЧЕНИЕМ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2695474C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КУРСА И ОГРАНИЧЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2681817C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2430858C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КУРСА И ОГРАНИЧЕНИЯ НОРМАЛЬНОЙ ПЕРЕГРУЗКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2503585C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2701628C2 |
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
| АДАПТИВНЫЙ АВТОПИЛОТ УГЛА КРЕНА | 2004 |
|
RU2272747C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА И ОГРАНИЧЕНИЯ УГЛА АТАКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434785C1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |



Помехоустойчивая система автоматического управления углом крена летательного аппарата содержит задатчик угла крена, три элемента сравнения, четыре пропорциональных звена, суммирующий элемент, статический сервопривод элеронов, динамическое звено, датчик угловой скорости крена, датчик угла крена, соединенные определенным образом. Обеспечивается повышение статической точности поддержания угла крена ЛА при действии ступенчатых и случайных ветровых возмущений. 4 ил.
Помехоустойчивая система автоматического управления углом крена летательного аппарата, содержащая последовательно соединенные задатчик угла крена, первый элемент сравнения, первое пропорциональное звено и второй элемент сравнения, последовательно соединенные статический сервопривод элеронов летательного аппарата, датчик угловой скорости крена летательного аппарата и второе пропорциональное звено, выход которого подключен ко второму входу второго элемента сравнения, датчик угла крена летательного аппарата, выход которого подключен ко второму входу первого элемента сравнения, ветровое возмущение, действующее на второй вход летательного аппарата, отличающаяся тем, что дополнительно содержит последовательно соединенные динамическое звено, третий элемент сравнения, третье пропорциональное звено и суммирующий элемент, второй вход которого подключен к выходу второго элемента сравнения, а выход к входу статического сервопривода элеронов летательного аппарата, вход динамического звена подключен к выходу датчика угловой скорости крена летательного аппарата, четвертое пропорциональное звено, вход которого подключен к выходу второго элемента сравнения, а выход ко второму входу третьего элемента сравнения.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА СО СТАТИЧЕСКИМ АВТОПИЛОТОМ И С ОГРАНИЧЕНИЕМ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2695474C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КУРСА И ОГРАНИЧЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2681817C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛОМ КРЕНА И ОГРАНИЧЕНИЯ УГЛОВОЙ СКОРОСТИ КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2430858C1 |
| US 0008000845 B2, 16.08.2011 | |||
| US 0009846432 B2, 19.12.2017. | |||

