Изобретение относится к системам автоматического регулирования полета и может быть использовано для управления боковым движением легких и сверхлегких самолетов, малоразмерных дистанционно пилотируемых летательных аппаратов (МДПЛА) и подобных.
Устройство управления боковым движением летательного аппарата, реализованное в автопилоте АП-28Г1 (Бортовые системы управления полетом. Под общей редакцией Ю.В.Байбородина, М.: Транспорт, 1975. - 336 с.) - [1, с. 242-243], с законами управления

содержит гироскопический датчик угла крена, датчики угловой скорости относительно продольной ОХ и нормальной OY осей, каналы элеронов и руля направления, выполненные в виде последовательно соединенных суммирующего усилителя и исполнительного механизма, выходом подключенного через блок обратной связи к вычитающему входу суммирующего усилителя, изодромное звено в канале руля направления.
Данное устройство позволяет получить удовлетворительные переходные процессы в боковом движении летательного аппарата, однако требует введения в состав системы управления гироскопического датчика углов крена. Введение гироскопического датчика углов крена приводит к значительному увеличению стоимости, массы и габаритов системы управления, что не всегда приемлемо для устройств управления, применяемых на МДПЛА, а также легких и сверхлегких летательных аппаратах.
Устройство управления боковым движением летательного аппарата (Романенко Л.Г., Филюнин С.В., Шилова Н.А. Автопилот. G 05 D 1/08, G 05 B 11/00, Авторское свидетельство №1802357, опубл. бюл. №10 от 15 марта 1993 г.) [1], реализующее закон управления элеронами и рулем направления вида


содержит формирователь сигнала управления, датчик скоростного напора и каналы руля направления и элеронов, каждый из которых состоит из последовательно соединенных датчика угловой скорости, соответственно относительно нормальной OY и продольной ОХ осей, блока переменных коэффициентов, суммирующего усилителя, формирователя закона управления и исполнительного механизма, выходом подключенного через блок обратной связи к первому вычитающему входу суммирующего усилителя, кроме того, канал руля направления содержит изодромный блок, а выход датчика скоростного напора соединен с управляющими входами блоков переменных коэффициентов обоих каналов, также установлены датчик боковой перегрузки, сумматор, блок умножения и блок определения знака, причем выход датчика угловой скорости относительно нормальной оси OY соединен с входом изодромного блока канала курса, с вторым входом блока умножения, с вычитающим входом сумматора и с входом блока определения знака, подключенного выходом к второму входу блока умножения, соединенного третьим входом с выходом сумматора, а выходом - с вторым суммирующим входом суммирующего усилителя канала элеронов, подключенного третьим суммирующим входом к выходу формирователя сигнала управления и к суммирующему входу сумматора, выход датчика боковой перегрузки соединен с вторым вычитающим входом суммирующего усилителя канала руля направления, подключенного вторым суммирующим входом к выходу изодромного блока канала курса.
Недостатком данного устройства является возможность его функционирования при маневрах только с небольшими углами крена, так как угловая скорость ωY, снимаемая с датчика угловой скорости относительно нормальной оси OY, будет близка по значению к угловой скорости виража только при небольших значениях углов крена, а также сравнительно большое время переходного процесса по углу крена летательного аппарата ввиду того, что угловая скорость ωY является проекцией угловой скорости виража на нормальную ось самолета и при больших значениях угла крена летательного аппарата ее значение существенно отличается от угловой скорости виража.
Изобретение решает задачу обеспечения разворота по курсу летательного аппарата с большими значениями углов крена при малой массе, габаритах и стоимости устройства управления боковым движением.
Поставленная задача достигается тем, что в устройство, содержащее каналы элеронов и руля направления, выполненные в виде последовательно соединенных датчика угловой скорости, соответственно относительно продольной оси ОХ и нормальной оси OY, суммирующего усилителя и исполнительного механизма, выходом подключенного через блок обратной связи к вычитающему входу суммирующего усилителя, а также изодромное звено, входом соединенное с датчиком угловой скорости относительно нормальной оси OY, а выходом с суммирующим усилителем канала руля направления, в канал элеронов дополнительно введены первый фильтр вида

где T1 - постоянная времени,  - коэффициент передачи по угловой скорости крена, p - оператор дифференцирования, вход которого соединен с выходом датчика угловой скорости относительно продольной оси ОХ, а выход соединен с первым входом суммирующего усилителя канала элеронов,
- коэффициент передачи по угловой скорости крена, p - оператор дифференцирования, вход которого соединен с выходом датчика угловой скорости относительно продольной оси ОХ, а выход соединен с первым входом суммирующего усилителя канала элеронов,
датчик угловой скорости относительно поперечной оси OZ, второй фильтр вида
где T2, T3 - постоянные времени, ξ - относительный коэффициент затухания,  - коэффициент передачи по угловой скорости виража, p - оператор дифференцирования, выход которого соединен со вторым входом суммирующего усилителя канала элеронов, блок формирования угловой скорости виража, первый вход которого соединен с выходом датчика угловой скорости относительно поперечной оси OZ, второй вход соединен с выходом датчика угловой скорости относительно нормальной оси OY и выход которого соединен с входом второго фильтра, содержащий последовательно соединенные первый блок умножения, первый и второй входы которого являются первым входом блока формирования угловой скорости виража, сумматор, блок вычисления корня и третий блок умножения, выход которого является выходом блока формирования угловой скорости виража; второй вход третьего блока умножения соединен с выходом блока вычисления знака, вход которого, соединенный с первым и вторым входами второго блока умножения, является вторым входом блока формирования угловой скорости виража; вход третьего блока умножения соединен со вторым входом сумматора.
- коэффициент передачи по угловой скорости виража, p - оператор дифференцирования, выход которого соединен со вторым входом суммирующего усилителя канала элеронов, блок формирования угловой скорости виража, первый вход которого соединен с выходом датчика угловой скорости относительно поперечной оси OZ, второй вход соединен с выходом датчика угловой скорости относительно нормальной оси OY и выход которого соединен с входом второго фильтра, содержащий последовательно соединенные первый блок умножения, первый и второй входы которого являются первым входом блока формирования угловой скорости виража, сумматор, блок вычисления корня и третий блок умножения, выход которого является выходом блока формирования угловой скорости виража; второй вход третьего блока умножения соединен с выходом блока вычисления знака, вход которого, соединенный с первым и вторым входами второго блока умножения, является вторым входом блока формирования угловой скорости виража; вход третьего блока умножения соединен со вторым входом сумматора.
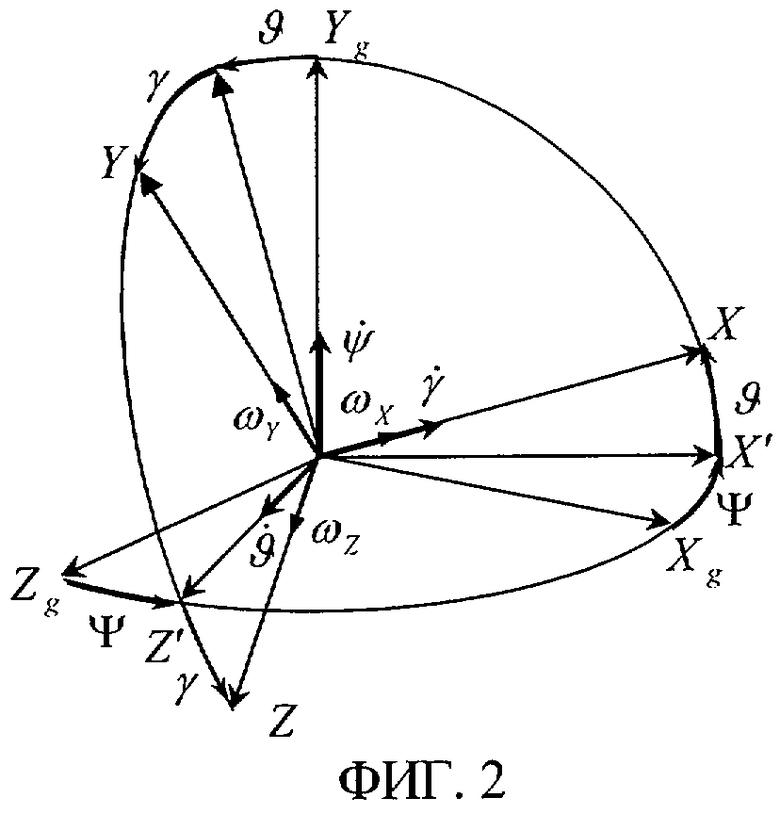
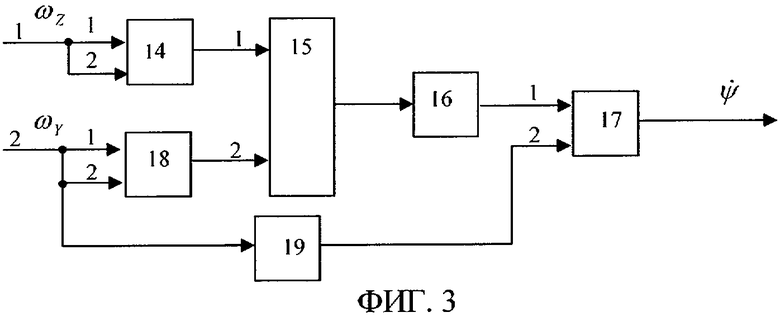
Сущность изобретения поясняется на фиг.1, фиг.2 и фиг.3. На фиг.1 представлена блок-схема устройства управления боковым движением летательного аппарата; на фиг.2 - кинематическая схема бокового движения; на фиг.3 - блок-схема реализации блока формирования угловой скорости виража.
Устройство содержит:
1 - датчик угловой скорости относительно продольной оси ОХ;
2 - первый фильтр;
3 - второй фильтр;
4 - суммирующий усилитель канала элеронов;
5 - исполнительный механизм канала элеронов;
6 - датчик угловой скорости относительно поперечной оси OZ;
7 - блок формирования угловой скорости виража;
8 - датчик угловой скорости относительно нормальной оси OY;
9 - изодромное звено;
10 - суммирующий усилитель канала руля направления;
11- исполнительный механизм канала руля направления;
12 - блок обратной связи канала элеронов;
13 - блок обратной связи канала руля направления.
Приняты следующие обозначения:
ωX - сигнал, снимаемый с датчика угловой скорости относительно продольной оси ОХ;
ωY - сигнал, снимаемый с датчика угловой скорости относительно нормальной оси OY;
ωZ - сигнал, снимаемый с датчика угловой скорости относительно поперечной оси OZ;
 - значение угловой скорости виража;
- значение угловой скорости виража;
δЭ - угол поворота элеронов;
δH - угол поворота руля направления.
Устройство содержит каналы элеронов и руля направления, выполненные в виде последовательно соединенных датчика угловой скорости, соответственно относительно продольной оси ОХ 1 и нормальной оси OY 8, суммирующего усилителя 4, 10 и исполнительного механизма 5,11, выходом подключенного через блок обратной связи 12, 13 к вычитающему входу суммирующего усилителя 4, 10, а также изодромное звено 9, входом соединенное с датчиком угловой скорости относительно нормальной оси OY 8, а выходом с суммирующим усилителем канала руля направления 10. Второй вход суммирующего усилителя канала элеронов 4 соединен через второй фильтр 3 с выходом блока формирования угловой скорости виража 7. Первый вход блока формирования угловой скорости виража 7 соединен с выходом датчика угловой скорости относительно поперечной оси OZ 6, второй вход соединен с выходом датчика угловой скорости относительно нормальной оси OY 8.
Кинематическая схема углового движения (фиг.2) позволяет записать следующие соотношения:


Из этих соотношений следует, что

Таким образом, угловая скорость виража равна
Принимая во внимание, что угол тангажа названных объектов управления мал, то можно принять cosϑ≅1. В этом случае угловую скорость виража можно вычислить согласно формуле

Блок формирования угловой скорости виража 7 (фиг.3) содержит:
14 -первый блок умножения;
15 - сумматор;
16 - блок вычисления корня;
17 - третий блок умножения;
18 - второй блок умножения;
19 - блок вычисления знака.
Блок формирования угловой скорости виража 7 содержит последовательно соединенные первый блок умножения 14, сумматор 15, блок вычисления корня 16, третий блок умножения 17. Второй вход третьего блока умножения 17 соединен с выходом блока вычисления знака 19, вход которого, соединенный с первым и вторым входами второго блока умножения 18, является вторым входом блока формирования угловой скорости установившегося виража 7, первым входом которого являются соединенные первый и второй входы первого блока умножения 14. Выходом блока формирования угловой скорости установившегося виража 7 является выход третьего блока умножения 17.
Работа устройства происходит следующим образом. При подаче команды на разворот в канал элеронов появляется крен летательного аппарата, возникает скольжение в сторону опущенной консоли крыла и разворот летательного аппарата по курсу с угловой скоростью  под действием момента флюгерности
под действием момента флюгерности  . Значения угловых скоростей ωZ и ωY с блоков 6 и 8 соответственно поступают на первый и второй входы блока формирования угловой скорости виража 7. На выходе первого блока умножения 14 формируется сигнал
. Значения угловых скоростей ωZ и ωY с блоков 6 и 8 соответственно поступают на первый и второй входы блока формирования угловой скорости виража 7. На выходе первого блока умножения 14 формируется сигнал  , на выходе второго блока умножения 18 - сигнал
, на выходе второго блока умножения 18 - сигнал  . Суммирование сформированных сигналов
. Суммирование сформированных сигналов  и
и  происходит на сумматоре 15. С выхода сумматора 15 сигнал поступает на блок вычисления корня 16, где формируется сигнал вида
происходит на сумматоре 15. С выхода сумматора 15 сигнал поступает на блок вычисления корня 16, где формируется сигнал вида  С выхода блока 16 сигнал поступает на первый вход третьего блока умножения 17, на второй вход которого поступает сигнал signωу с выхода блока вычисления знака 19, вход которого, соединенный с первым и вторым входами второго блока умножения 18, является вторым входом блока формирования угловой скорости виража 7. На выходе третьего блока умножения 17, который является выходом блока формирования угловой скорости виража 7, формируется сигнал, пропорциональный угловой скорости виража
С выхода блока 16 сигнал поступает на первый вход третьего блока умножения 17, на второй вход которого поступает сигнал signωу с выхода блока вычисления знака 19, вход которого, соединенный с первым и вторым входами второго блока умножения 18, является вторым входом блока формирования угловой скорости виража 7. На выходе третьего блока умножения 17, который является выходом блока формирования угловой скорости виража 7, формируется сигнал, пропорциональный угловой скорости виража  .
.
Сигнал, пропорциональный угловой скорости  в законе управления, будет противодействовать сигналу команды. Поэтому, увеличение угловой скорости
в законе управления, будет противодействовать сигналу команды. Поэтому, увеличение угловой скорости  будет продолжаться до тех пор, пока сигнал команды не будет уравновешен сигналом, пропорциональным
будет продолжаться до тех пор, пока сигнал команды не будет уравновешен сигналом, пропорциональным  . Дальнейший разворот будет происходить с постоянным углом крена и постоянной скоростью
. Дальнейший разворот будет происходить с постоянным углом крена и постоянной скоростью  .
.
После снятия сигнала команды сигнал, пропорциональный угловой скорости  , возвратит летательный аппарат в горизонтальное положение.
, возвратит летательный аппарат в горизонтальное положение.
Таким же образом будет устраняться случайный крен летательного аппарата, возникающий в результате действия возмущений и приводящий к появлению угловой скорости  .
.
Таким образам, сигнал, пропорциональный угловой скорости у в данном устройстве выполняет роль сигнала, пропорционального углу крена, который получают обычно с помощью позиционного гиродатчика крена. Отсутствие в составе устройства управления гиродатчиков позволяет снизить его массу, габариты и стоимость.
Введение второго фильтра 3 с передаточной функцией  уменьшает колебательность переходного процесса по крену летательного аппарата. На вход фильтра 3 подается сигнал, пропорциональный угловой скорости виража
уменьшает колебательность переходного процесса по крену летательного аппарата. На вход фильтра 3 подается сигнал, пропорциональный угловой скорости виража  , с выхода блока формирования угловой скорости виража 7, а выход соединен со вторым входом суммирующего усилителя канала элеронов 4.
, с выхода блока формирования угловой скорости виража 7, а выход соединен со вторым входом суммирующего усилителя канала элеронов 4.
Для сокращения времени переходного процесса летательного аппарата по крену сигнал, пропорциональный угловой скорости ωX, с датчика угловой скорости относительно продольной оси ОХ 1 подается на первый фильтр 2 с передаточной функцией  который пропускает только переменную составляющую угловой скорости ωX. С выхода первого фильтра 2 сформированный сигнал поступает на первый вход суммирующего усилителя канала элеронов 4.
который пропускает только переменную составляющую угловой скорости ωX. С выхода первого фильтра 2 сформированный сигнал поступает на первый вход суммирующего усилителя канала элеронов 4.
Сформированный сигнал управления с выхода суммирующего усилителя канала элеронов 4 поступает на вход исполнительного механизма 5, осуществляющего непосредственное воздействие на элероны.
Отклонение руля направления происходит в соответствии с законом
Введение сигнала, пропорционального угловой скорости относительно нормальной оси OY, увеличивает демпфирование летательного аппарата, что способствует более быстрому затуханию колебаний. Изодромное звено 9 в режиме установившегося разворота не пропускает постоянную составляющую угловой скорости относительно нормальной оси OY, тем самым не препятствуя выполнению разворота. В то же время в режиме установившегося разворота и в режиме стабилизации прямолинейного полета изодромное звено 9 пропускает переменную составляющую угловой скорости относительно нормальной оси OY, поэтому руль направления парирует воздействующие на летательный аппарат ветровые возмущения.
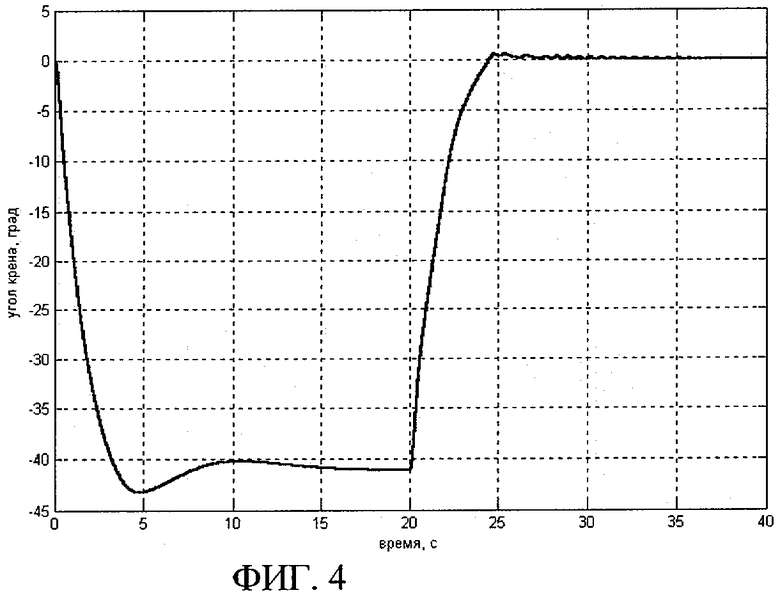
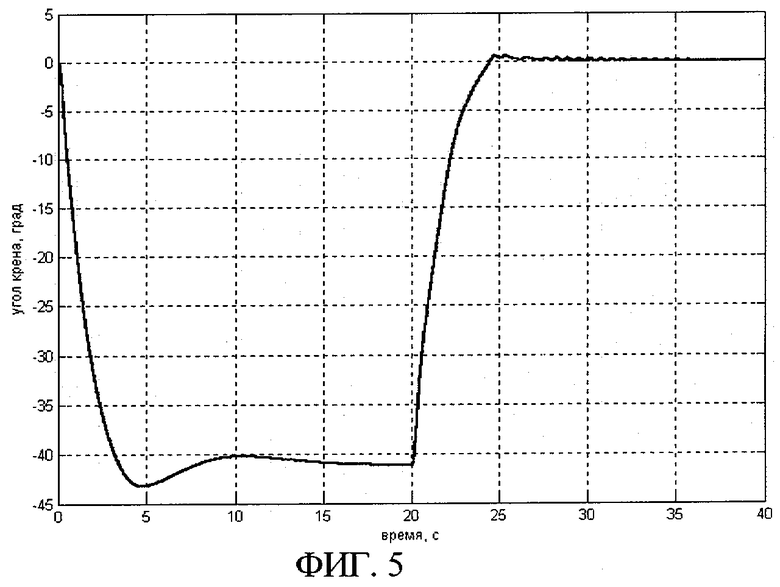
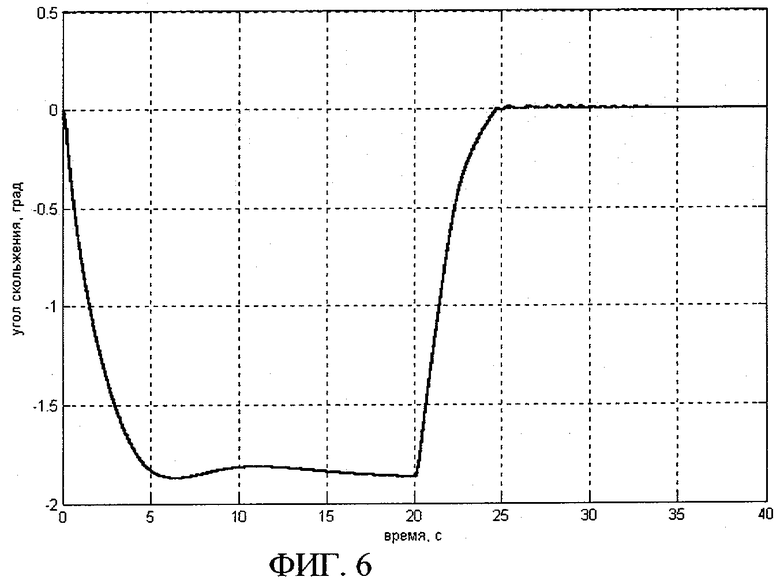
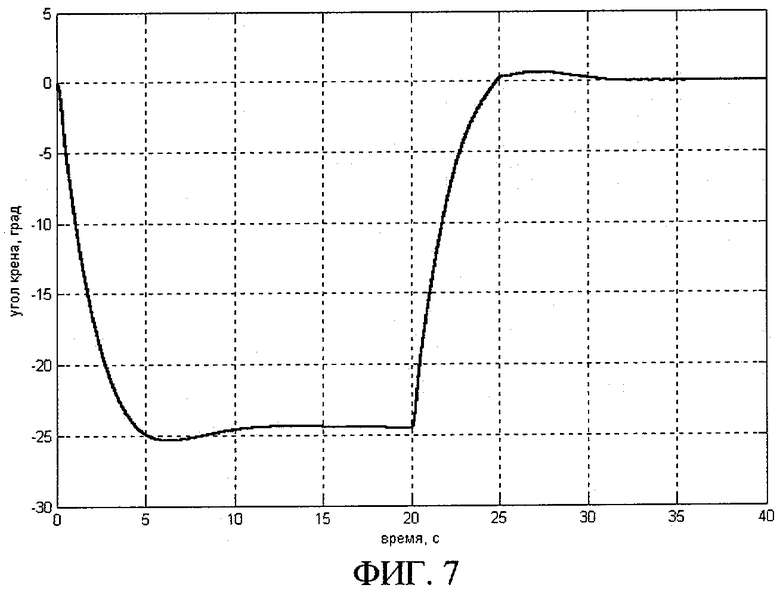
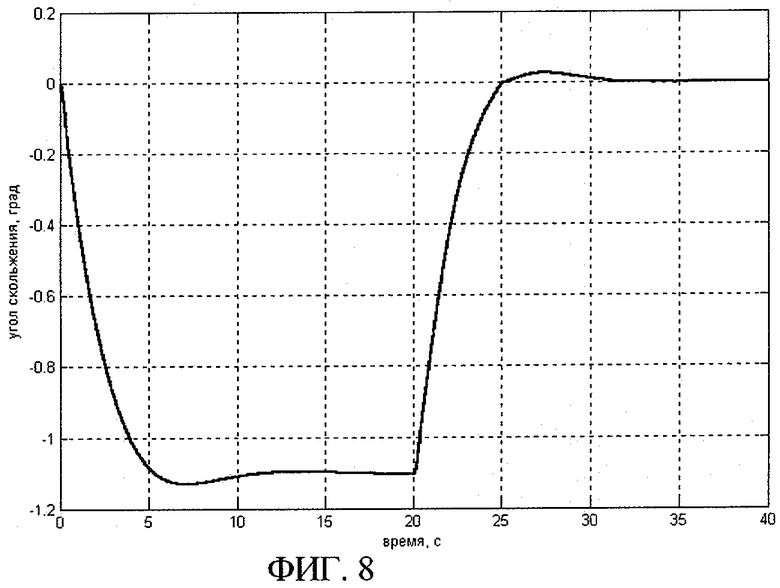
На фиг.4-8 приведены графики переходных процессов по результатам моделирования нелинейной пространственной модели движения летательного аппарата в боковом движении при подаче управляющей команды в канал элеронов продолжительностью 20 с для дистанционно-пилотируемого летательного аппарата массой 350 кг. Как свидетельствуют графики, при выходе на углы крена ≈40° перерегулирование по углу крена не превышает 4,76%, а при выходе на углы крена ≈25° перерегулирование по углу крена не превышает 1%, что соответствует показателям переходных процессов, предъявляемым к автопилотам классических схем (Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом - М.: Машиностроение, 1987.-240 с.)-[3, с.208], при времени регулирования в обоих случаях, не превышающем 4 с.
Для реализации предлагаемого устройства управления боковым движением летательного аппарата не требуется применения гироскопических датчиков позиционных сигналов, поэтому оно будет иметь меньшую массу, габариты и стоимость, обеспечивая развороты летательного аппарата по курсу с большими значениями углов крена.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289838C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2289839C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| Автопилот | 1990 |
|
SU1802357A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| Система управления боковым движением беспилотного малоразмерного летательного аппарата | 1990 |
|
SU1825746A1 |
| Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, и устройство для его осуществления | 2021 |
|
RU2764322C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
Изобретение относится к системам автоматического регулирования полета и может быть использовано для управления боковым движением малоразмерных летательных аппаратов. Устройство содержит каналы элеронов и руля направления. Вход суммирующего усилителя канала элеронов соединен через фильтр с выходом блока формирования угловой скорости виража. Блок формирования угловой скорости виража соединен с выходом датчика угловой скорости относительно поперечной оси OZ, вход соединен с выходом датчика угловой скорости относительно нормальной оси OY. Блок формирования угловой скорости виража содержит первый блок умножения, сумматор, блок вычисления корня, третий блок умножения. Вход третьего блока умножения соединен с выходом блока вычисления знака, вход которого, соединенный с входами второго блока умножения, является входом блока формирования угловой скорости установившегося виража, который соединен с входами блока умножения. Технический результат - не требуется применения гироскопических датчиков позиционных сигналов, поэтому устройство имеет меньшую массу, габариты и стоимость, обеспечивая развороты летательного аппарата по курсу с большими значениями углов крена. 1 з.п. ф-лы, 8 ил.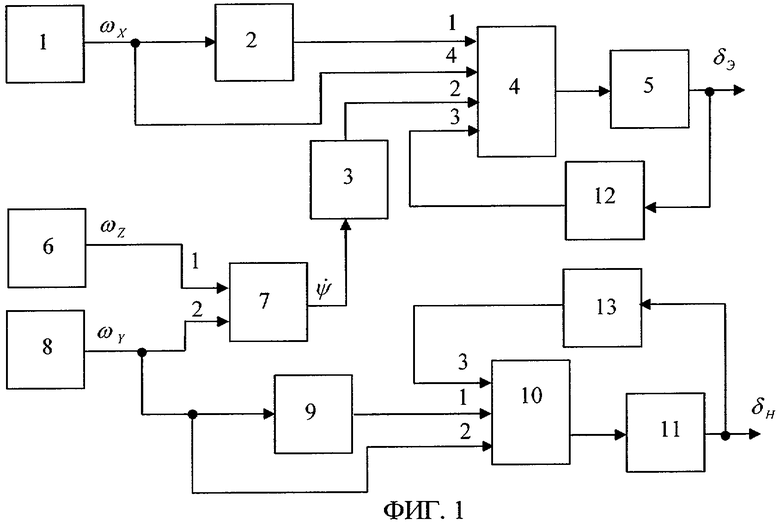

где T1 - постоянная времени,  - коэффициент передачи по угловой скорости крена,ρ - оператор дифференцирования,
- коэффициент передачи по угловой скорости крена,ρ - оператор дифференцирования,
вход которого соединен с выходом датчика угловой скорости относительно продольной оси ОХ, а выход соединен с первым входом суммирующего усилителя канала элеронов, второй фильтр вида:
где T2, T3, - постоянные времени, ξ - относительный коэффициент затухания,  - коэффициент передачи по угловой скорости виража,ρ - оператор дифференцирования,
- коэффициент передачи по угловой скорости виража,ρ - оператор дифференцирования,
выход которого соединен со вторым входом суммирующего усилителя канала элеронов, датчик угловой скорости относительно поперечной оси OZ, блок формирования угловой скорости виража, первый вход которого соединен с выходом датчика угловой скорости относительно поперечной оси OZ, второй вход соединен с выходом датчика угловой скорости относительно нормальной оси OY и выход которого соединен с входом второго фильтра.
| Автопилот | 1990 |
|
SU1802357A1 |
| Привод для двигателя с внешним подводом теплоты | 1980 |
|
SU872785A1 |

