Предлагаемое изобретение относится к способам определения углового положения быстровращающегося вокруг продольной оси летательного аппарата, основанным на измерении угловой скорости летательного аппарата триадой микроэлектромеханических преобразователей угловой скорости, установленной на летательном аппарате. Изобретение позволяет определить угол крена быстровращающегося летательного аппарата на неуправляемом участке движения по баллистической траектории.
Для летательных аппаратов с быстрым вращением вокруг продольной оси одной из основных задач является точная начальная выставка угла крена и повышение точности определения текущего значения угла крена, в частности за счет устранения погрешности масштабного коэффициента продольного преобразователя угловой скорости. Из-за большой продольной угловой скорости вклад масштабного коэффициента продольного преобразователя угловой скорости в погрешность навигационной системы является значительным. Для обеспечения точного решения навигационной задачи необходимо проводить дополнительную корректировку масштабного коэффициента продольного преобразователя угловой скорости в процессе движения.
Измерение угловой скорости летательного аппарата осуществляется в проекциях на взаимно ортогональные оси связанной с летательным аппаратом вращающейся по крену системы координат, при этом одна из осей триады микроэлектромеханических преобразователей угловой скорости и связанной с ней приборной системы координат сонаправлена с продольной осью вращения летательного аппарата.
Запуск быстровращающегося летательного аппарата сопровождается большими стартовыми перегрузками, кроме того бортовое электронное оборудование как правило запускается уже в процессе движения. В начале работы алгоритмов инерциальной навигационной системы необходимо выполнить начальную выставку, в частности по углу крена. При движении по баллистической траектории в первом приближении по уравнениям движения летательного аппарата на коротком интервале времени можно определить текущие значения проекций линейной скорости, координат и углов рыскания и тангажа для формирования данных грубой начальной выставки инерциальной навигационной системы. Для точной начальной выставки могут использоваться внешние измерители навигационной информации, например, приемная аппаратура спутниковой навигационной системы, время готовности которой может составлять несколько секунд в режиме «теплого» и «горячего» старта. Но определить текущий угол крена таким образом не представляется возможным.
Существуют способы, решающие задачу определения угла крена для быстровращающегося летательного аппарата на неуправляемом участке движения по баллистической траектории.
Известен способ определения угла крена снаряда (патент US 7395987, опубл. 2007) с применением фазового детектора и последующего комплементарного фильтра с определением фазовой ошибки между углом крена, вычисленного при помощи измерений продольного гироскопа и модулированным сигналом, который определяет колебания на частоте вращения вокруг продольной оси.
Недостатком этого способа является невысокая точность определения угла крена, так как в данном способе не учитывается погрешность масштабного коэффициента продольного гироскопа и поправка, связанная с изменением угла рыскания.
Наиболее близким аналогом предлагаемого изобретения является способ определения угла крена снаряда (Yang Qifan, Wang Jiang, Fan Shipeng, Bai Chan, Zhou Yongjia, Hu Shaoyong, ACTA ARMAMENTARII, 2023, vol. 44, no. 2, DOI: 10.12382/bgxb.2021.0707), который определяет начальную фазу угла крена при помощи фазового детектора с последующим усредняющим фильтром.
Недостаткам этого способа является невысокая точность определения угла крена, так как в способе не учитывается погрешность масштабного коэффициента продольного гироскопа и поправка, связанная с изменением угла рыскания.
Задачей предлагаемого изобретения является повышение точности определения угла крена быстровращающегося летательного аппарата по измерениям микроэлектромеханических преобразователей угловой скорости на неуправляемом участке движения по баллистической траектории.
Технический результат предлагаемого изобретения - повышение точности определения угла крена быстровращающегося летательного аппарата.
Технический результат достигается за счет того, что в способе определения угла крена быстровращающегося летательного аппарата в отличие от прототипа вводится дополнительная обработка оценки начальной фазы угла крена методом наименьших квадратов для поиска линейной зависимости вычисленного интеграла продольной угловой скорости и измеренной в фазовом детекторе начальной фазы угла крена, что позволяет учесть погрешность масштабного коэффициента продольного гироскопа, кроме того применение в фазовом детекторе фильтров нижних частот позволяет получить выходной сигнал с определенными частотными характеристиками, тем самым уменьшить шумы и собственные частоты микроэлектромеханических преобразователей и учесть поправку на смещение фазы угла крена после применения фильтра в итоговом значении угла крена, а также вводится поправка, учитывающая влияние изменения угла рыскания, что позволяет повысить точность определения угла крена.
Поставленная задача достигается тем, что способ определения угла крена быстровращающегося летательного аппарата включает измерение проекции угловой скорости летательного аппарата в связанной с летательным аппаратом вращающейся по крену системе координат, интегрирование измерения продольного преобразователя угловой скорости, фильтрацию измерений поперечных преобразователей угловой скорости с выделением в измерении полосы частот с центральной частотой равной измерению продольного преобразователя угловой скорости, демодуляцию отфильтрованных измерений поперечных преобразователей угловой скорости при помощи угла, равного интегралу по времени продольного преобразователя угловой скорости, фильтрацию демодулированных сигналов поперечных преобразователей угловой скорости с выделением в сигнале нижних частот, определение начальной фазы угла крена без поправок.
Но в отличие от известного прототипа в предлагаемом способе дополнительно определяют коэффициенты линейной регрессии между начальной фазой угла крена без поправок и интегралом продольного преобразователя угловой скорости методом наименьших квадратов, определяют фазовое запаздывание демодулированных сигналов поперечных преобразователей угловой скорости после фильтрации, определяют поправку учитывающую влияние изменения угла рыскания, формируют текущее значение угла крена на основе интеграла продольного преобразователя угловой скорости, коэффициентов линейной регрессии, значения фазового запаздывания демодулированных сигналов поперечных преобразователей угловой скорости после фильтрации, поправки, учитывающей влияние изменения угла рыскания.
Сущность предложенного способа состоит в следующем.
Для определения текущего угла крена быстровращающегося вокруг продольной оси летательного аппарата используются данные триады микроэлектромеханических преобразователей угловой скорости, установленных по осям связанной системы координат.
Для измерения проекций вектора угловой скорости по продольной оси установлен преобразователь угловой скорости с большим диапазоном измеряемых угловых скоростей. Алгоритм определения угла крена быстровращающегося летательного аппарата начинает работу сразу после запуска и инициализации систем бортового электронного оборудования и работает до момента готовности данных приемной аппаратуры спутниковой навигационной системы и запуска алгоритма бесплатформенной инерциальной навигационной системы.
Стартовая система координат определяется как OXcYcZc, полусвязанная система координат как OXeYeZe, связанная система координат как OXYZ, где OXcYc - плоскость стрельбы. Так как быстровращающийся, движущийся по баллистической траектории летательный аппарат имеет небольшое время полета, то принимается допущение о том, что стартовая система координат является инерциальной, и угловая скорость вращения стартовой система координат относительно инерциальной пренебрежимо мала.
Первое приближение угла крена определяется путем интегрирования проекции абсолютной угловой скорости на продольную ось связанной системы координат при нулевых начальных условиях:

где  - первое приближение угла крена;
- первое приближение угла крена;
ωxП - угловая скорость, измеренная продольным преобразователем угловой скорости.
Значение угла  является вспомогательной величиной и не является углом крена, указанное значение можно интерпретировать как значение угла крена в допущении о малости изменения угла рыскания и при нулевой начальной фазе.
является вспомогательной величиной и не является углом крена, указанное значение можно интерпретировать как значение угла крена в допущении о малости изменения угла рыскания и при нулевой начальной фазе.
Значения угловых скоростей, измеренные поперечными преобразователями угловой скорости, пропускаются через полосовые фильтры для выделения составляющих сигналов на частоте вращения вокруг продольной оси.
В качестве полосового фильтра могут быть использованы фильтры с характеристическим уравнением второго и более порядка, фильтры с конечной и с бесконечной импульсной характеристикой.
Выбор фильтра и его параметров определяется частотными характеристиками используемых для реализации алгоритма преобразователями угловой скорости.
Указанный полосовой фильтр перестраивается в зависимости от заданной центральной частоты, которая в свою очередь перестраивается в зависимости от текущего значения ωхП. Отфильтрованные значения измерений поперечных преобразователей угловой скорости обозначены как ωyП1 и ωzП1:

где ωyП1(z) - отфильтрованное значение поперечного преобразователя угловой скорости, установленного вдоль поперечной оси OY связанной системы координат;
WBPF(z) - передаточная функция полосового цифрового фильтра;
ωyП(z) - измеренное значение поперечного преобразователя угловой скорости, установленного вдоль поперечной оси OY;
ωzП1(z) - отфильтрованное значение поперечного преобразователя угловой скорости, установленного вдоль поперечной оси OZ;
ωzП(z) - измеренное значение поперечного преобразователя угловой скорости, установленного вдоль поперечной оси OZ.
С использованием вычисленного первого приближения угла крена  и отфильтрованных значений поперечных преобразователей угловой скорости ωyП1(z) и ωzП1(z) реализуется фазовый детектор. Для этого в демодуляторе формируются оценки значений:
и отфильтрованных значений поперечных преобразователей угловой скорости ωyП1(z) и ωzП1(z) реализуется фазовый детектор. Для этого в демодуляторе формируются оценки значений:

где  - демодулированное значение угловой скорости, оценка проекции угловой скорости на ось OYe;
- демодулированное значение угловой скорости, оценка проекции угловой скорости на ось OYe;
 - демодулированное значение угловой скорости, оценка проекции угловой скорости на ось OZe.
- демодулированное значение угловой скорости, оценка проекции угловой скорости на ось OZe.
Для исключения высокочастотных составляющих сформированные  и
и  пропускаются через соответствующие цифровые фильтры нижних частот передаточной функцией WLPF(z). В качестве фильтра нижних частот могут быть использованы фильтры с характеристическим уравнением первого и более порядка, численное значение частоты среза может принимать значения в диапазоне 0,1-10 Гц. Выбор фильтра определяется компромиссом между требуемым быстродействием фильтра и устойчивостью к типовым частотам собственных колебаний, а также учетом типового значения погрешности масштабного коэффициента продольного преобразователя угловой скорости. Полученные после фильтрации значения обозначены как
пропускаются через соответствующие цифровые фильтры нижних частот передаточной функцией WLPF(z). В качестве фильтра нижних частот могут быть использованы фильтры с характеристическим уравнением первого и более порядка, численное значение частоты среза может принимать значения в диапазоне 0,1-10 Гц. Выбор фильтра определяется компромиссом между требуемым быстродействием фильтра и устойчивостью к типовым частотам собственных колебаний, а также учетом типового значения погрешности масштабного коэффициента продольного преобразователя угловой скорости. Полученные после фильтрации значения обозначены как  и
и 

где  - отфильтрованное значение
- отфильтрованное значение
WLPF(z) - передаточная функция фильтра нижних частот;
 - отфильтрованное значение
- отфильтрованное значение 
Известное фазовое смещение, вызванное применением фильтра, необходимо учитывать в дополнительном слагаемом Δγlpƒ, добавленном к полученному результату работы алгоритма определения угла крена быстровращающегося вокруг продольной оси летательного аппарата. Такое смещение не учитывается в прототипе.
Значение поправки Δγlpƒ определяется как фазовое запаздывание примененного фильтра нижних частот на частоте Δω, где Δω - разность между средним значением проекции угловой скорости на ось ОХ, действующим в течение работы алгоритма, и среднем значением измерений продольного преобразователя угловой скорости.

где ΔγLPF - фазовое запаздывание фильтра нижних частот;
WLPF(j ⋅ Δω) - частотная передаточная функция фильтра нижних частот.
Для оценки начальной фазы угла крена введем вспомогательный угол β, характеризующий влияние изменения угла рыскания, для которого:

где ωуе - проекция абсолютной угловой скорости летательного аппарата на ось OYe, рад/с;
ωze - проекция абсолютной угловой скорости летательного аппарата на оси OZe, рад/с.
В соответствии с тригонометрическими тождествами получено выражение:

где  - оценка текущего угла крена.
- оценка текущего угла крена.
Если представить текущий угол крена в виде произведения средней угловой скорости на время:

 - среднее значение проекции угловой скорости на ось ОХ за время t, рад/с;
- среднее значение проекции угловой скорости на ось ОХ за время t, рад/с;
γ0 - начальное значение угла крена, рад,
 - среднее значение измерений продольного преобразователя угловой скорости за время t, рад/с;
- среднее значение измерений продольного преобразователя угловой скорости за время t, рад/с;
то при близких значениях  и
и  гармонические сигналы от разности углов имеют низкую частоту
гармонические сигналы от разности углов имеют низкую частоту 
С учетом формул (8) аргумент функции тангенса из формулы (7) можно представить в виде:

откуда:

где  - первое приближение начального значения угла крена, значение начальной фазы угла крена без учета поправок на Δω и β, рад.
- первое приближение начального значения угла крена, значение начальной фазы угла крена без учета поправок на Δω и β, рад.
Функция арктангенса определяется через два аргумента, что позволяет определить квадрант результата в диапазоне [0; 2π] и избавиться от неопределенности слагаемого π⋅n, n∈Z из (10). Далее это слагаемое будет опущено.
Значение Δω представим в виде:

Откуда:

С использованием вычисленного первого приближения угла крена  и оценок
и оценок  с учетом формулы (12) реализуется алгоритм метода наименьших квадратов для линейной регрессии:
с учетом формулы (12) реализуется алгоритм метода наименьших квадратов для линейной регрессии:

где kмнк, bмнк - коэффициенты линейной регрессии, равные:

Значение коэффициента kмнк оценивает погрешность масштабного коэффициента продольного гироскопа, дальнейшая корректировка которого в процессе движения описывается уравнением:

где  - скорректированное измерение продольного преобразователя угловой скорости.
- скорректированное измерение продольного преобразователя угловой скорости.
С учетом равенства (9), для получения текущего значения угла крена  используется выражение:
используется выражение:

Значение поправки β определяется следующим образом:

где  - угловая скорость рыскания, рад/с;
- угловая скорость рыскания, рад/с;
 - угловая скорость тангажа рад/с;
- угловая скорость тангажа рад/с;
ψ - угол рыскания летательного аппарата, рад;
ϑ - угол тангажа летательного аппарата, рад.
По аналогии с (10) значение арктангенса определяется через два аргумента в диапазоне [0; 2π], что позволяет избавиться от условия «если».
Численные значения  и ϑ могут быть рассчитаны с привлечением алгоритма начальной выставки для границ малого интервала времени, длительностью около нескольких секунд, на котором работает алгоритм оценки угла крена. При этом может быть использована опорная траектория, заранее заданная в качестве начальных данных, или упрощенная модель движения летательного аппарата. При отсутствии данных начальной выставки возможно принять значение β=0 (при
и ϑ могут быть рассчитаны с привлечением алгоритма начальной выставки для границ малого интервала времени, длительностью около нескольких секунд, на котором работает алгоритм оценки угла крена. При этом может быть использована опорная траектория, заранее заданная в качестве начальных данных, или упрощенная модель движения летательного аппарата. При отсутствии данных начальной выставки возможно принять значение β=0 (при  ) или β=π (при
) или β=π (при  ) в зависимости от характера движения летательного аппарата.
) в зависимости от характера движения летательного аппарата.
Сущность изобретения поясняется графическими изображениями.
На фиг. 1 представлена блок-схема, реализующая предлагаемый способ определения угла крена быстровращающегося летательного аппарата.
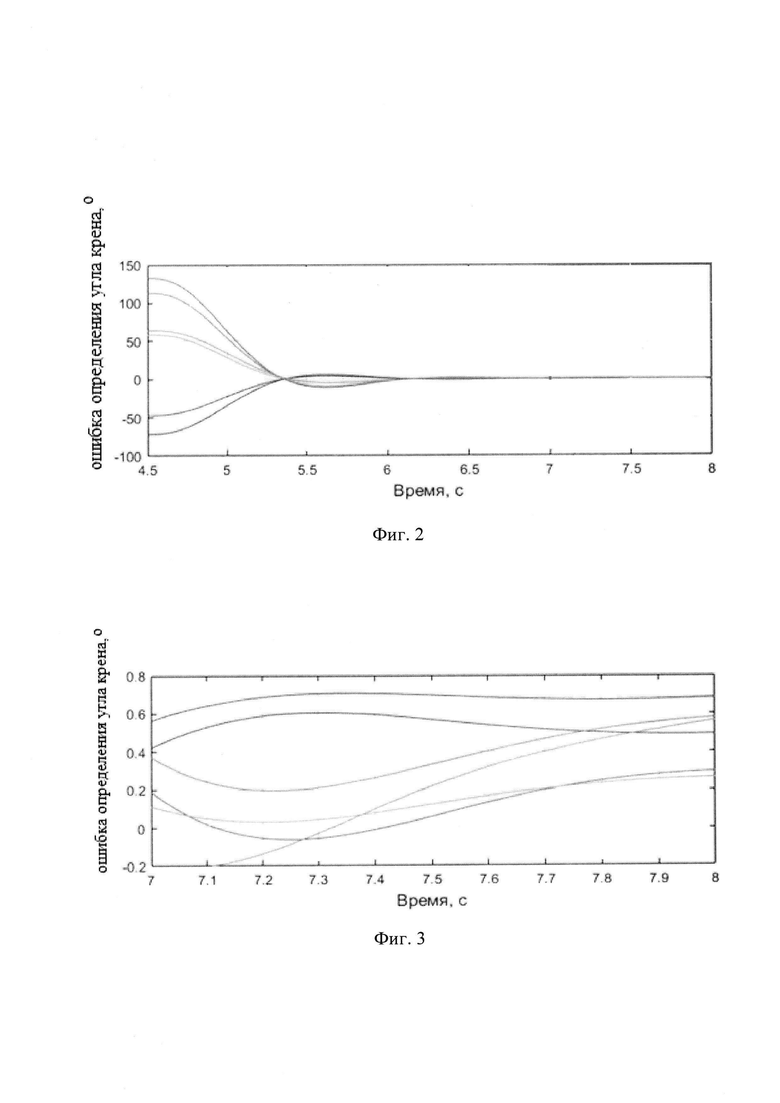
На фиг. 2 представлены графики ошибки определения угла крена быстровращающегося летательного аппарата при различных экспериментах, моделирующих вращательное движение летательного аппарата для различных баллистических траекторий с момента времени t=4.5 с от начала движения.
На фиг. 3 представлены графики ошибки определения угла крена быстровращающегося летательного аппарата с фиг. 2 в увеличенном масштабе в период от 7 с до 8 с от начала движения.
Согласно фиг. 1 блок-схема, реализующая предлагаемый способ определения угла крена быстровращающегося летательного аппарата, состоит из следующих функциональных элементов:
1 - преобразователь угловой скорости, установленный вдоль продольный оси вращения ОХ, связанной с летательным аппаратом;
2 - преобразователь угловой скорости, установленный вдоль поперечной оси OY;
3 - преобразователь угловой скорости, установленный вдоль поперечной оси OZ;
4 - интегратор;
5, 6 - полосовой фильтр;
7 - фазовый детектор;
8 - демодулятор;
9, 10 - фильтр нижних частот;
блок 11 - блок оценки фазового смещения угла крена после применения фильтра;
блок 12 - блок оценки начальной фазы угла крена без поправок;
блок 13 - блок обработки данных по методу наименьших квадратов;
блок 14 - блок определения поправки на угол, характеризующий влияние изменения угла рыскания;
блок 15 - блок оценки угла крена.
Преобразователи угловой скорости 1-3 определяют проекции вектора абсолютной скорости в связанной системе координат по продольной и поперечным осям соответственно и передают данные в бортовую цифровую вычислительную машину (не показана).
Измеренное значение проекции абсолютной угловой скорости по продольной оси ОХ с преобразователя угловой скорости 1, ωxП поступает в интегратор 4, где проводится численное интегрирование при нулевых начальных условиях и вычисляется первое приближение угла крена 
Измеренные значения проекций абсолютной угловой скорости по поперечным осям OY и OZ с преобразователей угловой скорости 2 и 3 соответственно ωyП, ωzП для выделения составляющих сигнала на частоте вращения вокруг продольной оси, пропускаются через полосовые фильтры 5 и 6 соответственно и вычисляются отфильтрованные значения измерений поперечных преобразователей угловой скорости 2, 3 ωyП1(z) и ωzП1(z) соответственно.
Вычисленное первое приближение угла крена  и отфильтрованные значения ωyП1 и ωzП1 измерений поперечных преобразователей угловой скорости 2 и 3 поступают в фазовый детектор 7, где в демодуляторе 8 значения ωyП1 и ωzП1 демодулируются при помощи угла
и отфильтрованные значения ωyП1 и ωzП1 измерений поперечных преобразователей угловой скорости 2 и 3 поступают в фазовый детектор 7, где в демодуляторе 8 значения ωyП1 и ωzП1 демодулируются при помощи угла  и формируются оценки значений
и формируются оценки значений  и
и  которые фильтруются в фильтрах нижних частот 9 и 10 соответственно.
которые фильтруются в фильтрах нижних частот 9 и 10 соответственно.
В блоке 11 определяется дополнительное слагаемое Δγlpƒ, которое учитывает фазовое смещение угла крена после применения фильтра. В блоке 12 вычисляется первое приближение начальной фазы угла крена  без учета поправок на изменение угла рыскания и фазовое запаздывание демодулированных сигналов.
без учета поправок на изменение угла рыскания и фазовое запаздывание демодулированных сигналов.
В блоке 13 с использованием вычисленного первого приближения угла крена  и оценок
и оценок  с учетом формулы (16) реализуется алгоритм метода наименьших квадратов и определяются коэффициенты линейной регрессии kмнк, bмнк.
с учетом формулы (16) реализуется алгоритм метода наименьших квадратов и определяются коэффициенты линейной регрессии kмнк, bмнк.
В блоке 14 определяется поправка на угол β, характеризующий влияние изменения угла рыскания. В блоке 15 определяется текущая оценка угла крена 
Описанный алгоритм определения угла крена быстровращающегося летательного аппарата реализован в изделии, испытанном на двухосевом динамическом испытательном стенде, имитаторе движения Acuitas. Для измерений угловой скорости используются микромеханические преобразователи угловой скорости АО «ГИРООПТИКА» средней точности.
Работа алгоритма начинается с момента времени t1 равного 2,5 с, с учетом времени готовности бортового электронного оборудования и до момента времени t2 равного 8 с. Выборка и обработка опорных данных сформирована на частоте ƒs равной 500 Гц. Ошибка определения угла крена Δγ, полученная в результате сравнения оценки  с известным в рамках эксперимента, текущим значением угла крена γ, представлена на фиг. 2 и 3. Графики приведены с 4,5 секунд с учетом времени сходимости фильтров.
с известным в рамках эксперимента, текущим значением угла крена γ, представлена на фиг. 2 и 3. Графики приведены с 4,5 секунд с учетом времени сходимости фильтров.
При оценке погрешности определения угла крена быстровращающегося летательного аппарата при натурных экспериментах с учетом влияния ошибок измерений преобразователей угловой скорости получено значение среднеквадратического отклонения для Δγ не более 1,07 градуса.
Предлагаемый способ определения угла крена быстровращающегося летательного аппарата по сравнению с прототипом позволяет точнее определить угол крена летательного аппарата на неуправляемом участке движения по баллистической траектории, так как учитывает погрешность масштабного коэффициента продольного преобразователя угловой скорости и рассчитан на большую скорость вращения путем введения дополнительной обработки оценки начальной фазы угла крена при помощи метода наименьших квадратов, введения поправки на фазовое смещение сигнала, обусловленное применением фильтров нижних частот и введением поправки, учитывающей изменение угла рыскания.
Таким образом, использование данного способа позволяет повысить точность определения угла крена быстровращающегося вокруг продольной оси летательного аппарата на неуправляемом участке движения по баллистической траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2015 |
|
RU2584400C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| БОРТОВОЙ КОМПЛЕКС УПРАВЛЯЕМОГО СТАБИЛИЗИРОВАННОГО ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА С ТЕЛЕВИЗИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2003 |
|
RU2239770C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2341775C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| СПОСОБ ОПЕРАТИВНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ ЭЛЕМЕНТОВ ВНЕШНЕГО ОРИЕНТИРОВАНИЯ КОСМИЧЕСКОГО СКАНЕРНОГО СНИМКА | 2015 |
|
RU2597024C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ НА ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ ВЫСОКОЙ ТОЧНОСТИ | 2015 |
|
RU2615032C1 |

Изобретение относится к способу определения угла крена быстровращающегося летательного аппарата. Для определения угла крена производят: измерение проекции угловой скорости летательного аппарата в связанной с летательным аппаратом вращающейся по крену системе координат, интегрирование измерения продольного преобразователя угловой скорости, фильтрацию измерений поперечных преобразователей угловой скорости с выделением в измерении полосы частот с центральной частотой, равной измерению продольного преобразователя угловой скорости, демодуляцию отфильтрованных измерений поперечных преобразователей угловой скорости при помощи угла, равного интегралу по времени продольного преобразователя угловой скорости, фильтрацию демодулированных сигналов поперечных преобразователей угловой скорости с выделением в сигнале нижних частот, определение начальной фазы угла крена без поправок; при этом определяют коэффициенты линейной регрессии между начальной фазой угла крена без поправок и интегралом продольного преобразователя угловой скорости методом наименьших квадратов, определяют фазовое запаздывание демодулированных сигналов поперечных преобразователей угловой скорости после фильтрации, определяют поправку, учитывающую влияние изменения угла рыскания, формируют текущее значение угла крена на основе интеграла продольного преобразователя угловой скорости, коэффициентов линейной регрессии, значения фазового запаздывания демодулированных сигналов поперечных преобразователей угловой скорости после фильтрации, поправки, учитывающей влияние изменения угла рыскания. Обеспечивается повышение точности определения угла крена. 3 ил.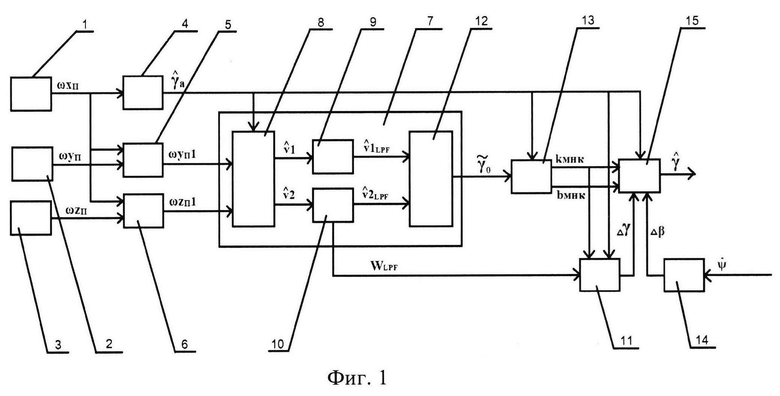
Способ определения угла крена быстровращающегося летательного аппарата, включающий измерение проекции угловой скорости летательного аппарата в связанной с летательным аппаратом вращающейся по крену системе координат, интегрирование измерения продольного преобразователя угловой скорости, фильтрацию измерений поперечных преобразователей угловой скорости с выделением в измерении полосы частот с центральной частотой, равной измерению продольного преобразователя угловой скорости, демодуляцию отфильтрованных измерений поперечных преобразователей угловой скорости при помощи угла, равного интегралу по времени продольного преобразователя угловой скорости, фильтрацию демодулированных сигналов поперечных преобразователей угловой скорости с выделением в сигнале нижних частот, определение начальной фазы угла крена без поправок, отличающийся тем, что определяют коэффициенты линейной регрессии между начальной фазой угла крена без поправок и интегралом продольного преобразователя угловой скорости методом наименьших квадратов, определяют фазовое запаздывание демодулированных сигналов поперечных преобразователей угловой скорости после фильтрации, определяют поправку, учитывающую влияние изменения угла рыскания, формируют текущее значение угла крена на основе интеграла продольного преобразователя угловой скорости, коэффициентов линейной регрессии, значения фазового запаздывания демодулированных сигналов поперечных преобразователей угловой скорости после фильтрации, поправки, учитывающей влияние изменения угла рыскания.
| Датчик угла крена для вращающегося объекта | 2023 |
|
RU2811808C1 |
| СИДЕНЬЕ С ПОВОРОТНОЙ СПИНКОЙ | 0 |
|
SU143669A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2015 |
|
RU2584400C1 |
| CN 107478110 A, 15.12.2017. | |||

