Изобретение относится к железнодорожному транспорту и может быть использовано для автоматизации управления движением пассажирского электровоза.
Известна микропроцессорная система управления локомотивом МСУЛ-А, предназначенная для эксплуатации на электровозах и электропоездах. Эта система используется на электровозе ВЛ11К с контакторно-резистивным регулированием тяговых двигателей (Руководство по эксплуатации 04Б.00.00.00 РЭ, 2005). Микропроцессорная система управления локомотивом содержит блок центрального вычислителя, к входам которого подключены аналоговый измерительный блок, блок входных сигналов, соединенный с цепями управления локомотива, и блок защиты от скольжения, пульт управления машиниста, соединенный через блок связи с блоком центрального вычислителя и блоком управления контакторами, дополнительные входы которого соединены с выходами блока центрального вычислителя, блок центрального вычислителя через соответствующие блоки сопряжения соединен с блоком индикации и монитором.
Микропроцессорная система управления локомотивом МСУЛ-А обеспечивает управление аппаратами силовых цепей электровоза при регулировании работы тяговых двигателей в режимах тяги и электрического торможения, защиту тяговых двигателей от перегрузки и боксования, управление вспомогательными машинами и цепями (в том числе по системе многих единиц), прием команд от машиниста и помощника машиниста, индикацию состояния цепей электровоза, токов и напряжений. Основным недостатком вышеуказанной микропроцессорной системы управления является то, что она не реализует автоматизированного управления движением пассажирского электровоза и не позволяет обеспечить управление аппаратами силовых цепей электровоза при ее отказе.
Известная система управления движением электропоезда, принятая в качестве прототипа, содержит датчик пути и скорости, выход которого подключен к блоку определения скорости, генератор временных меток, выход которого подключен к блоку определения текущего времени и второму входу блока определения скорости, датчик давления, установленный на тормозной магистрали, пульт управления, блок управления режимом тяги и блок управления режимом торможения, вычислительный блок, блок памяти, тактовый генератор, контроллер, два дешифратора, блок управления, три блока сопряжения, блок индикации и блок речевого информатора. Блок определения скорости, генератор временных меток, блок определения текущего времени, датчик давления и пульт управления подключены соответственно к первому, второму, третьему, четвертому и пятому входам первого блока сопряжения, выход которого соединен с первым входом вычислительного блока. Ко второму, третьему и четвертому входам вычислительного блока подключены соответственно блок управления, блок памяти и тактовый генератор, причем тактовый генератор соединен с седьмым входом первого блока сопряжения. Блок управления через контроллер подключен к блоку памяти. Первый выход вычислительного блока через второй блок сопряжения соединен с блоком индикации, второй выход вычислительного блока через третий блок сопряжения соединен с блоком речевого информатора, третий выход вычислительного блока через первый дешифратор подключен к блоку управления режимом тяги, четвертый выход вычислительного блока через второй дешифратор подключен к блоку управления режимом торможения. Выходы блока управления режимом тяги, блока управления режимом торможения подключены к цепям управления электропоездом, выход блока управления режимом тяги подключен также к шестому входу первого блока сопряжения (RU 2213669 C1, B60L 15/40, 10.10.03).
Вышеописанная система управления движением электропоезда обеспечивает высокую точность выполнения графика движения поезда, оптимальный расход электроэнергии на тягу электропоезда, а также позволяет снизить психофизиологическую нагрузку на машиниста электропоезда.
Однако использование этой системы в режиме ручного управления, осуществляемого посредством вычислительного блока, приводит к невозможности управления электропоездом в случае отказа системы.
Техническим результатом изобретения является повышение надежности системы управления за счет обеспечения движения пассажирского электровоза при отказах электронного оборудования системы.
Технический результат изобретения достигается тем, что система автоматизированного управления движением пассажирского электровоза, содержащая вычислительный блок, соединенный с блоком памяти и тактовым генератором, блок сопряжения, через который к вычислительному блоку подключены средства измерения скорости движения электровоза, средства измерения давления в тормозной магистрали, средства измерения напряжения в контактной сети и на якорях тяговых двигателей и средства измерения потребляемой энергии на тягу и отопление поезда, пульт управления, подключенный одним своим выходом к входу блока сопряжения, при этом выход вычислительного блока соединен с входом дешифратора, к выходу которого подключены блок управления режимом тяги и блок управления режимом торможения, причем выходы блока управления режимом тяги и блока управления режимом торможения соединены с цепями управления электровоза, согласно изобретению снабжена маневрово-аварийным пультом, в состав которого входят индикаторы, тумблер включения, кнопки набора и сброса позиций, и устройством аварийного пуска, состоящим из блока формирования сигнала предварительной установки, блока формирования сигнала управления сбросом позиций и линейного дешифратора, при этом вход блока формирования сигнала предварительной установки соединен с выводом тумблера включения, второй вывод которого соединен с выходом формирователя сигнала разрешения аварийного пуска, вход которого подключен к второму выходу пульта управления, который своим другим выходом подключен к вычислительному блоку, первый выход блока формирования сигнала предварительной установки соединен с первым входом линейного дешифратора, второй вход которого соединен с выходом блока формирования сигнала управления сбросом позиций, вход которого соединен со вторым выходом блока формирования сигнала предварительной установки, третий выход блока формирования сигнала предварительной установки соединен со вторым входом блока управления режимом тяги, кнопки набора и сброса позиций маневрово-аварийного пульта управления подключены параллельно соответственно кнопкам набора позиций и кнопке сброса позиций на пульте управления и соединены соответственно с третьим и четвертым входами линейного дешифратора, выходы которого подключены к цепям управления электровозом, индикаторы маневрово-аварийного пульта управления подключены параллельно индикаторам на пульте управления и соединены с соответствующими информационными выходами линейного дешифратора.
На чертеже представлена структурная схема системы автоматизированного управления движением пассажирского электровоза.
Система автоматизированного управления движением пассажирского электровоза содержит вычислительный блок 1, соединенный с блоком 2 памяти и тактовым генератором 3, блок 4 сопряжения, через который к вычислительному блоку 1 подключены средство 5 измерения скорости движения электровоза, средство 6 измерения давления в тормозной магистрали, средство 7 измерения напряжения в контактной сети и на якорях тяговых двигателей и средство 8 измерения потребляемой энергии на тягу и отопление поезда, пульт 9 управления, подключенный к блоку 4 сопряжения и вычислительному блоку 1, выход вычислительного блока 1 соединен с входом дешифратора 11, к выходу которого подключены блок 12 управления режимом тяги и блок 13 управления режимом торможения, причем выходы блока 12 управления режимом тяги и блока 13 управления режимом торможения соединены с цепями 10 управления электровоза, маневрово-аварийный пульт 14 управления, в состав которого входят индикаторы 15, тумблер 16 включения, кнопка 17 набора и кнопка 18 сброса позиций, устройство 19 аварийного пуска состоит из блока 20 формирования сигнала предварительной установки, блока 21 формирования сигнала управления сбросом позиций и линейного дешифратора 22, при этом вход блока 20 формирования сигнала предварительной установки соединен с выводом тумблера 16 включения, второй вывод которого соединен с формирователем 23 сигнала разрешения аварийного пуска, причем первый выход блока 20 формирования сигнала предварительной установки соединен с первым входом линейного дешифратора 22, второй вход которого соединен с выходом блока 21 формирования сигнала управления сбросом позиций, вход которого соединен со вторым выходом блока 20 формирования сигнала предварительной установки, третий выход блока 20 формирования сигнала предварительной установки соединен со вторым входом блока 12 управления режимом тяги, кнопки 17, 18 набора и сброса позиций маневрово-аварийного пульта 14 управления подключены параллельно соответственно кнопке 24 набора позиций и кнопке 25 сброса позиций на пульте 9 управления и соединены соответственно с третьим и четвертым входами линейного дешифратора 22, выходы которого подключены к цепям 10 управления электровозом, индикаторы 15 маневрово-аварийного пульта 14 управления подключены параллельно индикаторам 26 на пульте 9 управления и соединены с соответствующими информационными выходами линейного дешифратора 22.
Устройство работает следующим образом.
При отсутствии нарушений в функционировании системы автоматизированного ведения поезда работа устройства аналогична работе устройства-прототипа.
Режим тяги. Для приведения электровоза в движение машинист с помощью пульта 9 управления выдает команду "Пуск", которая подается в вычислительный блок 1, при этом из блока 2 памяти переписывается в вычислительный блок 1 информация о графике движения по расписанию. Вычислительный блок 1 определяет время, по истечении которого поезд должен прибыть к пункту назначения, и распределяет его по перегонам между промежуточными остановочными пунктами. В вычислительном блоке 1 определяются средняя скорость движения по перегону и расчетная скорость отключения тяги. Так как на остановке фактическая скорость равна нулю, и соответственно она меньше расчетной, то вычислительный блок 1 формирует код команды включения одной из позиций тяги, а на выходе дешифратора 11 вырабатывается требуемая команда, поступающая в блок 12 управления режимом тяги, и электровоз приходит в движение.
Средство 5 измерения скорости движения электровоза определяет фактическую скорость движения. Выходной сигнал средства 5 измерения скорости движения электровоза, несущий информацию о фактической скорости движения через блок 4 сопряжения, поступает в вычислительный блок 1, где сравнивается с расчетным значением скорости движения. До тех пор, пока расчетная скорость движения больше фактической, вычислительный блок 1 при необходимости вырабатывает код команды следующей позиции тяги. Значение средней скорости и расчетного коэффициента связи между скоростью отключения тяги и средней скоростью движения, которые записаны в блоке 2 памяти, получены в процессе подготовки базы данных для участка движения и являются оптимальными по критерию минимального расхода энергии на тягу для номинальных условий. В процессе реального движения имеются отклонения от номинальных условий, поэтому вычислительный блок 1 на основании информации из средства 5 измерения скорости движения электровоза осуществляет коррекцию значения расчетной скорости.
При достижении значения скорости движения, равного расчетному значению, вычислительный блок 1 через дешифратор 11 и блок 12 управления режимом тяги вырабатывает сигнал отключения тяги. Тяговые двигатели отключаются от контактной сети, и электровоз переходит в режим выбега.
Если в процессе разгона от пульта 9 управления поступит сигнал "боксования", то вычислительный блок 1 формирует код команды "боксование", на основании которого дешифратор 11 вырабатывает команду "защита от боксования", по которой блок 12 управления режимом тяги уменьшает позицию тяги, а после прекращения боксования с заданной выдержкой времени вычислительный блок 1 формирует коды команд набора позиций тяги.
Кроме того, в вычислительный блок 1 через блок 4 сопряжения от пульта 9 управления поступают сигналы автоматической локомотивной сигнализации (АЛСН) о состоянии огней локомотивного светофора. В случае появления сигнала, требующего снижения скорости движения, вычислительный блок 1 вырабатывает команду отключения тяги и переходит в режим торможения.
Режим выбега. В режиме выбега вычислительный блок 1 осуществляет сравнение фактической скорости, поступающей из средства 5 измерения скорости движения электровоза, с расчетным значением скорости, определяемым в каждом такте. Если траектория движения на выбеге отличается от расчетной на величину больше заданного порога, то вычислительный блок 1 вырабатывает код команды "включение позиции тяги". Вычислительный блок 1 с заданной дискретностью производит расчет оставшегося времени хода поезда, расчетной скорости движения на выбеге и производит сравнение с фактической скоростью движения, поступающей из средства 5 измерения скорости движения электровоза. Если по каким-либо причинам траектория движения поезда отличается от рассчитанной на АРМ подготовки данных для номинальных условий, корректировка этих отклонений осуществляется путем изменения расчетной скорости движения на выбеге.
При достижении скорости движения на выбеге, равной расчетной скорости начала торможения, система управления электропоездом переходит в режим торможения. Значения коэффициентов для определения скорости движения от пути ("тормозной кривой") для разных ситуаций движения заложены в блоке 2 памяти.
Режим торможения. В режиме торможения из блока 2 памяти в вычислительный блок 1 передается информация, отображающая "тормозную кривую". Вычислительный блок 1 осуществляет сравнение фактической скорости движения, поступающей из средства 5 измерения скорости движения электровоза, со значением скорости "тормозной кривой". Если указанная разность превышает заданный порог, то вычислительный блок 1 вырабатывает код команды "тормоз", которая через дешифратор 11 подается в блок 13 управления режимом торможения, а из него - в цепи 10 управления электровозом. Электровоз начинает снижать скорость движения, отрабатывая "тормозную кривую" под контролем вычислительного блока 1. Значение давления в тормозных цилиндрах и соответственно значение тормозной силы в вычислительный блок 1 поступает от средства 6 измерения давления в тормозной магистрали. Вычислительный блок 1 осуществляет коррекцию расчетной "тормозной кривой" таким образом, чтобы скорость движения поезда была равна заданной.
При отказах системы, связанных с нарушением ее функционирования, машинист должен включить тумблер 16 включения. При отсутствии сигнала о снижении скорости движения от устройств АЛСН от второго выхода пульта 9 управления в формирователе 23 формируется сигнал разрешения аварийного пуска, который поступает на вывод тумблера 16 включения. Таким образом, включение устройства 19 аварийного пуска можно осуществить с помощью тумблера 16 включения только при наличии этого сигнала. Управление движением электровоза и работа устройства в этом случае осуществляется следующим образом.
При включении устройства 19 аварийного пуска сигнал со второго вывода тумблера 16 поступает на вход блока 20 формирования сигнала предварительной установки и с третьего его выхода поступает на второй вход блока 12 управления режимом тяги и отключает его от цепей 10 управления электровозом. В то же время сигнал с первого выхода блока 20 формирования сигнала предварительной установки поступает на первый вход линейного дешифратора 22, который формирует сигналы включения на своих информационных выходах. При этом на пульте 9 управления и маневрово-аварийном пульте 14 управления загораются одноименные индикаторы 26 и 15, что свидетельствует о включении устройства аварийного пуска.
Далее при нажатии машинистом кнопки 17 «НАБОР» на маневрово-аварийном пульте 14 управления или одноименной кнопки 24 на пульте 9 управления сигнал поступает на третий вход линейного дешифратора 22 и на его выходах вырабатываются сигналы установки следующей позиции, поступающие на цепи 10 управления электровозом. Аналогично, при нажатии кнопок 18, 25 «СБРОС» сигнал поступает на четвертый вход линейного дешифратора и на его выходах вырабатываются сигналы сброса текущей позиции, поступающие на цепи 10 управления электровозом.
Кроме того, при работе электровоза на реостатных позициях («РП»), а также при выходе на позицию ослабления поля возбуждения тяговых двигателей («ОП») на пульте 9 управления и маневрово-аварийном пульте 14 управления загораются соответствующие индикаторы 26 и 15 по сигналам с информационных выходов линейного дешифратора 22.
В случае появления сигнала о снижении скорости движения от устройств АЛСН и соответствующего пропадания сигнала разрешения аварийного пуска на входе тумблера 16 включения со второго выхода блока 20 формирования сигнала предварительной установки сигнал поступает на вход блока 21 формирования сигнала управления сбросом позиций, который, в свою очередь, на своем выходе формирует команду автоматического сброса позиций, поступающую на второй вход линейного дешифратора 22, на выходах которого вырабатываются сигналы сброса тягового режима, поступающие на цепи 10 управления электровозом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ СОСТАВИТЕЛЯ ПОЕЗДОВ В ЗОНЕ НЕГАБАРИТНЫХ МЕСТ | 2004 |
|
RU2301169C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| Устройство управления маневровым локомотивом | 1981 |
|
SU1025558A1 |
| Система управления маневровыми локомотивами | 2016 |
|
RU2622524C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА (ЭСУТ) | 2008 |
|
RU2386551C1 |
| Устройство для управления маневровым локомотивом | 1990 |
|
SU1801845A1 |
| КОМПЛЕКТНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОВОЗОВ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2406623C1 |
Изобретение относится к железнодорожному транспорту и может быть использовано для автоматизации управления движением пассажирского электровоза. Вход блока формирования сигнала предварительной установки соединен с выводом тумблера включения, второй вывод которого соединен с выходом формирователя сигнала разрешения аварийного пуска, вход которого подключен к второму выходу пульта управления, который своим другим выходом подключен к вычислительному блоку. Первый выход блока формирования сигнала предварительной установки соединен с первым входом линейного дешифратора, второй вход которого соединен с выходом блока формирования сигнала управления сбросом позиций, вход которого соединен со вторым выходом блока формирования сигнала предварительной установки, третий выход блока формирования сигнала предварительной установки соединен со вторым входом блока управления режимом тяги. Кнопки набора и сброса позиций маневрово-аварийного пульта управления подключены параллельно соответственно кнопкам набора позиций и кнопке сброса позиций на пульте управления машиниста и соединены соответственно с третьим и четвертым входами линейного дешифратора, выходы которого подключены к цепям управления электровозом. Индикаторы маневрово-аварийного пульта управления подключены параллельно индикаторам на пульте управления машиниста и соединены с соответствующими информационными выходами линейного дешифратора. Пульт управления машиниста своим первым выходом подключен к входу вычислительного блока. Технический результат заключается в повышении надежности системы управления. 1 ил.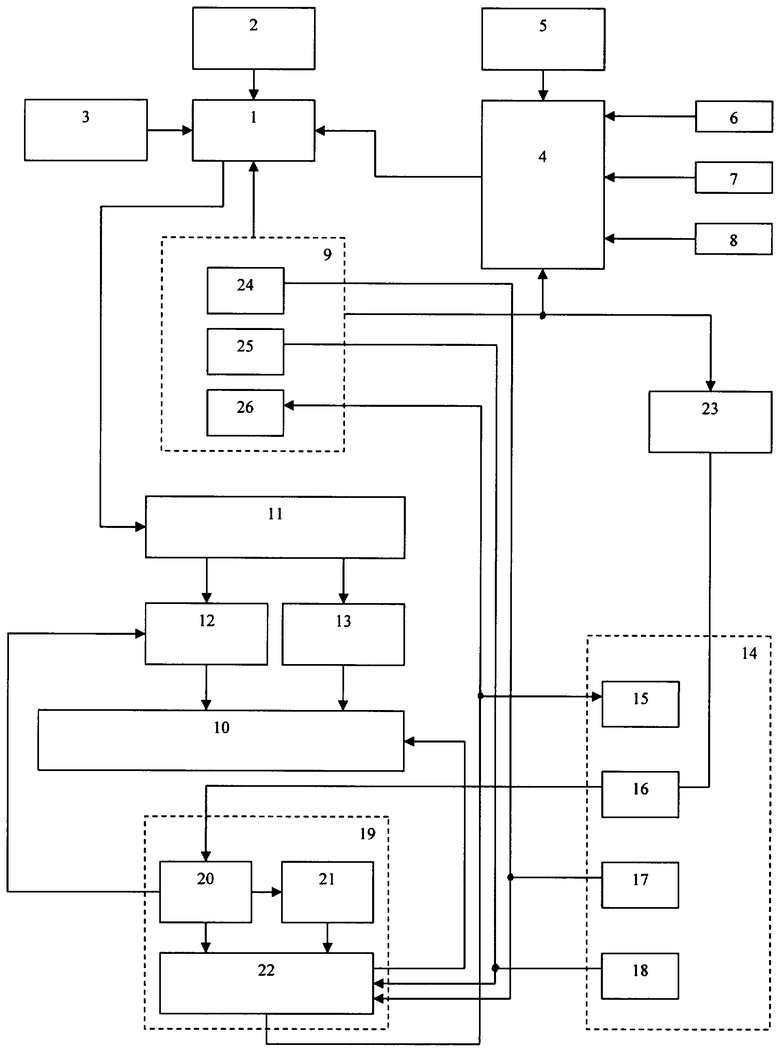
Система автоматизированного управления движением пассажирского электровоза, содержащая вычислительный блок, соединенный с блоком памяти и тактовым генератором, блок сопряжения, через который к вычислительному блоку подключены средства измерения скорости движения электровоза, средства измерения давления в тормозной магистрали, средства измерения напряжения в контактной сети и на якорях тяговых двигателей и средства измерения потребляемой энергии на тягу и отопление поезда, пульт управления, подключенный одним своим выходом к входу блока сопряжения, при этом выход вычислительного блока соединен с входом дешифратора, к выходу которого подключены блок управления режимом тяги и блок управления режимом торможения, причем выходы блока управления режимом тяги и блока управления режимом торможения соединены с цепями управления электровоза, отличающаяся тем, что снабжена маневрово-аварийным пультом, в состав которого входят индикаторы, тумблер включения, кнопки набора и сброса позиций у и устройством аварийного пуска, состоящим из блока формирования сигнала предварительной установки, блока формирования сигнала управления сбросом позиций и линейного дешифратора, при этом вход блока формирования сигнала предварительной установки соединен с выводом тумблера включения, второй вывод которого соединен с выходом формирователя сигнала разрешения аварийного пуска, вход которого подключен к второму выходу пульта управления, который своим другим выходом подключен к вычислительному блоку, первый выход блока формирования сигнала предварительной установки соединен с первым входом линейного дешифратора, второй вход которого соединен с выходом блока формирования сигнала управления сбросом позиций, вход которого соединен со вторым выходом блока формирования сигнала предварительной установки, третий выход блока формирования сигнала предварительной установки соединен со вторым входом блока управления режимом тяги, кнопки набора и сброса позиций маневрово-аварийного пульта управления подключены параллельно соответственно кнопкам набора позиций и кнопке сброса позиций на пульте управления и соединены соответственно с третьим и четвертым входами линейного дешифратора, выходы которого подключены к цепям управления электровозом, индикаторы маневрово-аварийного пульта управления подключены параллельно индикаторам на пульте управления и соединены с соответствующими информационными выходами линейного дешифратора.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| Устройство для автоматического управления движением шахтного электровоза | 1988 |
|
SU1572850A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| US 5340062 A, 23.08.1994. | |||

