Изобретение относится к области построения бортовых систем автоматического управления движением подвижного состава, в частности, железнодорожного.
Известна система для усовершенствования техники вождения поездов и снижения расхода топлива (Патент РФ №2409484, МПК B60L 15/32, В60С 17/12, G05B 13/02), содержащая устройство определения местоположения, базу данных по профилям путей, содержащую данные по рельефу местности и траектории железнодорожного пути, устройство для сбора погодной информации, устройство сбора поездной информации, запоминающее устройство, подключенные к процессору, содержащему алгоритм для вычисления массы поезда и алгоритм прямой связи для определения величины ускорения и/или величины замедления поезда на основе вычисленной массы и ожидаемых рельефа местности и траектории железнодорожного пути, которая на борту локомотивного состава выполняет определение участка изменения рельефа рельсового пути, и для оптимизации расхода топлива локомотивным составом на основе вычисления массы поезда при приближении поезда к участку изменения рельефа рельсового пути выполняет корректировку параметра регулирования мощности локомотивного состава.
Недостатком известного технического решения является отсутствие возможности измерения напряжения в контактной сети и уточнения в процессе движения тяговых характеристик локомотива, что затрудняет его использование на подвижном составе с электрической тягой.
Другим недостатком известного технического решения является отсутствие алгоритма решения задачи оптимального управления движением поезда в общем виде, позволяющего определять в режиме реального времени на борту локомотива последовательность переключений режимов работы подвижного состава (тяги, выбега, поддержания скорости, торможения) начиная с текущей координаты до конечного пункта следования, что снижает общий эффект оптимизации расхода топлива, достигаемый за счет корректировки параметра регулирования мощности локомотивного состава на основе вычисления массы поезда при приближении поезда к участку изменения рельефа рельсового пути, на протяженных участках со сложным профилем пути и сложной структурой ограничений скорости.
Известна система управления движением пассажирского электровоза (Патент РФ №2273567, МПК B60L 15/40, B61L 3/20), содержащая датчик пути и скорости, выход которого подключен к первому входу блока определения скорости, генератор временных меток, выход которого подключен к входу блока определения текущего времени и второму входу блока определения скорости, датчики давления, установленные соответственно на тормозном цилиндре и уравнительном резервуаре, блок измерения напряжения в контактной сети и токов на тяговых двигателях, пульт управления, первый блок сопряжения к первому, второму, третьему, четвертому восьмому и пятому входам которого подключены соответственно блок определения скорости, генератор временных меток, блок определения текущего времени, датчики давления, пульт управления, а выход соединен с первым входом вычислительного блока, ко второму, третьему и четвертому входам которого подключены соответственно блок управления, блок памяти и тактовый генератор, причем тактовый генератор соединен с шестым входом первого блока сопряжения, блок управления через контроллер подключен к блоку памяти, первый выход вычислительного блока через второй блок сопряжения соединен с блоком индикации, второй выход вычислительного блока через третий блок сопряжения соединен с блоком речевого информатора, третий выход вычислительного блока через первый дешифратор подключен к блоку управления режимом тяги, четвертый выход вычислительного блока через второй дешифратор подключен к блоку управления режимом торможения, выходы блока управления режимом тяги, блока управления режимом торможения подключены к цепям управления электровоза, выход блока управления режимом тяги подключен также к седьмому входу первого блока сопряжения, а блок измерения напряжения в контактной сети и токов на тяговых двигателях подключен по последовательному каналу к вычислительному блоку, который выполнен с возможностью вычисления оптимального скоростного режима движения в реальном времени, минимизирующего затраченную на тягу энергию. Система работает в режимах тяги, выбега, поддержания скорости и торможения.
Недостатком известного технического решения является отсутствие функции адаптации для корректировки параметров, используемых для вычисления оптимального скоростного режима в реальном времени на основе сравнения расчетной и фактической траекторий движения транспортного средства в пространстве скорости и пути. Это может приводить к существенному рассогласованию последних и необходимости корректировки режимов движения «по факту», что приводит к дополнительному расходу электроэнергии и снижает эффект от вычисления системой и применения оптимального скоростного режима.
Другим недостатком известного технического решения является несоответствие его структуры архитектуре современных бортовых систем подвижного состава, построенных на основе блочно-модульного принципа, когда все основные бортовые подсистемы (тяги, торможения, собственных нужд, кабины машиниста и другие) выполнены в виде законченных модулей и объединены коммуникационными каналами связи. Это затрудняет использование указанного технического решения на современном железнодорожном подвижном составе, поскольку, во-первых, оно не содержит технических средств сопряжения с бортовыми коммуникационными каналами связи, а во-вторых, частично дублирует аппаратуру, в настоящее время реализованную в составе бортовых модульных подсистем, что экономически не обоснованно.
Наиболее близким по технической сущности к заявляемому, взятым за прототип является стенд для разработки, наладки и испытаний бортовых распределенных информационно-управляющих систем подвижного состава железных дорог (Патент ПМ РФ №125737, МПК G05B 23/02), содержащий с учетом существенных для предлагаемого устройства признаков, центральный блок управления (ЦБУ), к первому порту ввода-вывода которого подключен первый коммуникационный канал, соединенный с первым и вторым дисплейными модулями, ко второму порту ввода-вывода которого подключен второй коммуникационный канал, соединенный с электронным блоком локомотивной системы безопасности и электронным блоком тормозной системы, к третьему порту ввода-вывода которого подключен третий коммуникационный канал, соединенный с первыми портами ввода-вывода блоков управления оборудованием, вторыми портами ввода-вывода связанных с первым и вторым блоками органов управления машиниста, к четвертому порту ввода-вывода которого подключен четвертый коммуникационный канал, соединенный с электронным блоком тяговой системы.
Недостатком указанного устройства является отсутствие возможности автоматического управления движением подвижного состава с адаптацией к изменению параметров объекта управления и внешней среды.
Задачей изобретения является расширение функциональных возможностей прототипа для реализации автоматического управления движением современного подвижного состава на основе обработки информации, получаемой уже имеющимися техническими средствами устройства-прототипа и дополнительно вводимыми, передаваемой по коммуникационным каналам связи, и вычисления в режиме реального времени оптимальных режимов движения с последующей передачей соответствующих команд управления по каналам связи исполнительным устройствам, а также адаптации системы к текущему состоянию объекта управления и внешней среды.
Сущность изобретения заключается в том, что в устройство, включающее с учетом существенных для предлагаемого устройства признаков, центральный блок управления (ЦБУ), к первому порту ввода-вывода которого подключен первый коммуникационный канал, соединенный с первым и вторым дисплейными модулями, ко второму порту ввода-вывода которого подключен второй коммуникационный канал, соединенный с электронным блоком бортовой системы безопасности и электронным блоком тормозной системы, к третьему порту ввода-вывода которого подключен третий коммуникационный канал, соединенный с первыми портами ввода-вывода блоков управления оборудованием, вторыми портами ввода-вывода связанных с первым и вторым блоками органов управления машиниста, к четвертому порту ввода-вывода которого подключен четвертый коммуникационный канал, соединенный с электронным блоком тяговой системы введены пятый коммуникационный канал, сетевой контроллер, имеющий, по крайней мере семь портов ввода-вывода, блок связи со стационарным центром управления перевозками (далее - блок СЦУП), блок спутниковой навигационной системы типа ГЛОНАСС/GPS (далее - блок СНС), блок бортовой метеостанции, блок управления движением, включающий контроллер ввода данных, контроллер вывода данных, блок управления режимами движения, блок вычисления оптимальной траектории движения, блок базы данных, блок оценивания состояния, блок идентификатора, блок адаптера, причем, пятый коммуникационный канал связи подключен к пятому порту-вводу выводу ЦБУ и первому порту сетевого котроллера, второй порт которого соединен со вторым портом ввода-вывода электронного блока бортовой системы безопасности, третий порт-ввода-вывода которого соединен с блоком СЦУП, четвертый порт ввода-вывода которого подключен к выходу блока СНС, пятый порт ввода-вывода которого подключен к выходу блока бортовой метеостанции, шестой порт ввода-вывода которого подключен к выходу блока вывода данных блока управления движением, седьмой порт ввода-вывода которого подключен к входу блока ввода данных блока управления движением, первый вход блока оценивания состояния соединен с выходом блока ввода данных, первый выход блока оценивания состояния - с первым входом блока управления режимами движения и первым входом блока вычисления оптимальной траектории движения, второй выход блока оценивания состояния - с первым входом блока идентификатора, второй вход блока идентификатора соединен с первым выходом блока вычисления оптимальной траектории движения, третий вход блока идентификатора соединен с первым выходом блока управления режимами движения, выход блока идентификатора соединен с первым входом блока адаптера, пятый вход блока идентификатора соединен с первым выходом блока адаптера, второй выход которого в свою очередь соединен со вторым входом блока оценивания состояния, третий выход - со вторым входом блока вычисления оптимальной траектории движения, четвертый выход - со вторым входом блока управления режимами движения, выход блока управления режимами движения в свою очередь соединен с входом блока вывода данных, а третий вход - со вторым выходом блока вычисления оптимальной траектории движения, первый, второй, третий и четвертый выходы блока базы данных соединены соответственно с четвертым входом блока управления режимами, третьим входом блока вычисления оптимальной траектории движения, четвертым входом блока идентификатора и вторым входом блока адаптера.
Техническим результатом является возможность реализации функции автоматического управления движением подвижного состава на основе получения данных посредством коммуникационного канала связи от ЦБУ о текущих параметрах движения и данных от блока бортовой системы безопасности, а также дополнительной информации о внешней среде и объекте управления от блоков СЦУП, СНС, бортовой метеостанции, предварительно обрабатываемой блоком оценивания состояния, и расчета блоком вычисления оптимальной траектории движения оптимальной траектории, выбора на ее основе блоком управления режимами движения оптимального режима движения в текущий момент времени и передачи соответствующих команд управления через коммуникационный канал связи и ЦБУ исполнительным устройствам.
Технический результат заключается также в возможности адаптации системы управления движением подвижного состава к изменению параметров внешней среды и объекта управления на основе сравнения расчетной оптимальной траектории движения и фактически реализуемой с учетом дополнительной информации о внешней среде и объекте управления с помощью контура адаптации, включающего блоки оценивания состояния, идентификатора и адаптера.
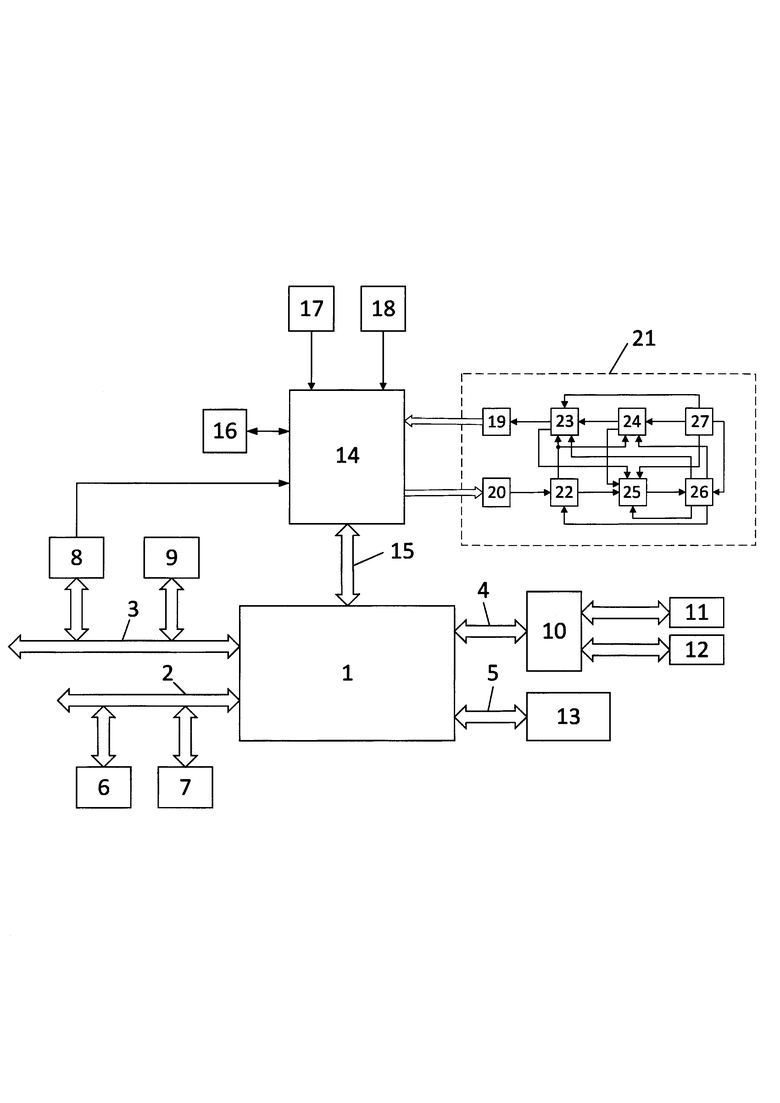
На фиг. 1 представлена блок-схема заявляемого устройства. Система управления движением подвижного состава включает ЦБУ 1, к первому порту ввода-вывода которого подключен первый коммуникационный канал 2, соединенный с первым 6 и вторым 7 дисплейными модулями, ко второму порту ввода-вывода которого подключен второй коммуникационный канал 3, соединенный с первым портом ввода-вывода электронного блока бортовой системы безопасности 8 и электронным блоком тормозной системы 9, к третьему порту ввода-вывода которого подключен третий коммуникационный канал 4, соединенный с первыми портами ввода-вывода блоков управления оборудованием 10, вторыми портами ввода-вывода связанных с первым и вторым блоками органов управления машиниста 11 и 12, к четвертому порту ввода-вывода которого подключен четвертый коммуникационный канал 5, соединенный с электронным блоком тяговой системы 13, сетевой контроллер 14, первый порт ввода-вывода которого с помощью пятого коммуникационного канала 15 соединен с пятым портом ввода-вывода ЦБУ, второй порт ввода-вывода которого соединен со вторым портом ввода-вывода электронного блока бортовой системы безопасности 8, третий порт ввода-вывода которого соединен с блоком связи с центром управления перевозками 16, четвертый порт ввода-вывода которого соединен с блоком спутниковой навигационной системы 17, пятый порт ввода-вывода которого соединен с блоком бортовой метеостанции 18, шестой и седьмой порты ввода-вывода которого соединены соответственно с выходом блока вывода данных 19 и входом блока ввода данных 20 блока управления движением 21, включающим также блок оценивания состояния 22, первый вход которого соединен с выходом блока ввода данных 20, первый выход - с первым входом блока управления режимами движения 23 и первым входом блока вычисления оптимальной траектории движения 24, второй выход - с первым входом блока идентификатора 25, второй вход которого соединен с первым выходом блока вычисления оптимальной траектории движения 24, третий вход - с первым выходом блока управления режимами движения 23, выход - с первым входом блока адаптера 26, а пятый вход - с первым выходом блока адаптера 26, второй выход которого в свою очередь соединен со вторым входом блока оценивания состояния 22, третий выход -со вторым входом блока вычисления оптимальной траектории движения 24, четвертый выход - со вторым входом блока управления режимами 23, выход которого в свою очередь соединен с входом блока вывода данных 19, а третий вход - со вторым выходом блока вычисления оптимальной траектории движения 24, блок базы данных 27, первый, второй, третий и четвертый выходы которого соединены соответственно с четвертым входом блока управления режимами движения 23, третьим входом блока вычисления оптимальной траектории движения 24, четвертым входом блока идентификатора 25 и вторым входом блока адаптера 26.
Устройство работает следующим образом. В процессе движения подвижного состава данные о параметрах объекта управления, текущих параметрах движения, поездной обстановке, параметрах внешней среды и кодах автоматической сигнализации, формируемые бортовыми подсистемами тяги 13, торможения 9, безопасности 8, управления оборудованием 10, а также получаемые из центра управления с помощью блока 16, от спутниковой навигационной системы 17 и бортовой метеостанции 18, команды от органов управления машиниста 11 и 12 посредством центрального блока управления 1, коммуникационных каналов связи 2, 3, 4, 5, 15 и сетевого контроллера 14 с помощью блока ввода данных 20 вводятся в блок управления движением 21, где предварительно обрабатываются блоком оценивания состояния 22 и передаются в блок вычисления оптимальной траектории 24 и блок управления режимами движения 23, с помощью которых с использованием бортовой базы данных 27, содержащей данные о характеристиках подвижного состава, профилях пути и других характеристиках участка эксплуатации, вырабатываются команды управления режимами движения, а также данные для информирования с помощью дисплейных модулей 6 и 7 машинистов подвижного состава, которые с помощью блока вывода данных 19 передаются посредством сетевого контроллера 14 и центрального блоку управления 1 исполнительным устройствам тяговой 13 и тормозной 9 систем и блокам управления оборудованием 10. Тем самым реализуется основной управляющий цикл реального времени и достигается главная цель изобретения - реализация автоматического управления движением подвижного состава. Параллельно с основным управляющим циклом реализуется вспомогательный цикл адаптации с помощью блока идентификации 25, осуществляющего в режиме реального времени идентификацию параметров подвижного состава и внешней среды, и блока адаптера 26, осуществляющего на основе данных блока идентификатора 25 оптимальную настройку блоков оценивания состояния 22, вычисления оптимальной траектории движения 24 и управления режимами движения 23. Тем самым обеспечивается адаптация системы к условиям движения и повышается качество управления, реализуемого основным циклом, что обеспечивает достижение заявленной задачи изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАЗНОРОДНЫХ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2016 |
|
RU2626034C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2249525C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| АВИАЦИОННАЯ СИСТЕМА ОБРАБОТКИ ДАННЫХ АЭРОСЪЕМКИ ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНЫХ ЗОН И УПРАВЛЕНИЯ РЕЖИМАМИ РАБОТЫ ЦЕЛЕВЫХ НАГРУЗОК БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2840814C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
Изобретение относится к бортовым средствам автоматического управления движением подвижного состава. Система включает центральный блок управления, первый, второй, третий, четвертый и пятый коммуникационные каналы связи, первый и второй дисплейные модули, электронный блок бортовой системы безопасности, электронный блок тормозной системы, блоки управления оборудованием, первый и второй блоки органов управления машиниста, электронный блок тяговой системы, сетевой контроллер, блок связи со стационарным центром управления перевозками, блок спутниковой навигационной системы типа ГЛОНАСС/GPS, блок бортовой метеостанции, блок управления движением, включающий контроллер ввода данных, контроллер вывода данных, блок управления режимами движения, блок вычисления траектории движения, блок базы данных, блок оценивания состояния, блок идентификатора, блок адаптера. Достигается возможность автоматического управления движением подвижного состава с адаптацией системы к текущему состоянию объекта управления и внешней среды. 1 ил.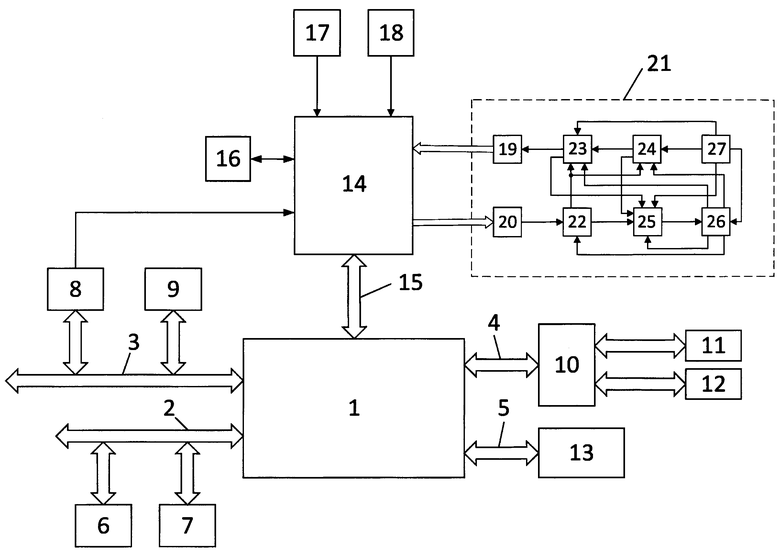
Система управления движением подвижного состава, включающая центральный блок управления (ЦБУ), к первому порту ввода-вывода которого подключен первый коммуникационный канал, соединенный с первым и вторым дисплейными модулями, ко второму порту ввода-вывода которого подключен второй коммуникационный канал, соединенный с электронным блоком бортовой системы безопасности и электронным блоком тормозной системы, к третьему порту ввода-вывода которого подключен третий коммуникационный канал, соединенный с первыми портами ввода-вывода блоков управления оборудованием, вторыми портами ввода-вывода связанных с первым и вторым блоками органов управления машиниста, к четвертому порту ввода-вывода которого подключен четвертый коммуникационный канал, соединенный с электронным блоком тяговой системы, отличающаяся тем, что дополнительно содержит пятый коммуникационный канал, сетевой контроллер, имеющий по крайней мере семь портов ввода-вывода, блок связи со стационарным центром управления перевозками (блок СЦУП), блок спутниковой навигационной системы типа ГЛОНАСС/GPS (блок СНС), блок бортовой метеостанции, блок управления движением, включающий контроллер ввода данных, контроллер вывода данных, блок управления режимами движения, блок вычисления оптимальной траектории движения, блок базы данных, блок оценивания состояния, блок идентификатора, блок адаптера, причем, пятый коммуникационный канал связи подключен к пятому порту ввода-вывода ЦБУ и первому порту сетевого котроллера, второй порт которого соединен со вторым портом ввода-вывода электронного блока бортовой системы безопасности, третий порт ввода-вывода которого соединен с блоком СЦУП, четвертый порт ввода-вывода которого подключен к выходу блока СНС, пятый порт ввода-вывода которого подключен к выходу блока бортовой метеостанции, шестой порт ввода-вывода которого подключен к выходу блока вывода данных блока управления движением, седьмой порт ввода-вывода которого подключен к входу блока ввода данных блока управления движением, первый вход блока оценивания состояния соединен с выходом блока ввода данных, первый выход блока оценивания состояния - с первым входом блока управления режимами движения и первым входом блока вычисления оптимальной траектории движения, второй выход блока оценивания состояния - с первым входом блока идентификатора, второй вход блока идентификатора соединен с первым выходом блока вычисления оптимальной траектории движения, третий вход блока идентификатора соединен с первым выходом блока управления режимами движения, выход блока идентификатора соединен с первым входом блока адаптера, пятый вход блока идентификатора соединен с первым выходом блока адаптера, второй выход которого в свою очередь соединен со вторым входом блока оценивания состояния, третий выход - со вторым входом блока вычисления оптимальной траектории движения, четвертый выход - со вторым входом блока управления режимами движения, выход блока управления режимами движения в свою очередь соединен с входом блока вывода данных, а третий вход - со вторым выходом блока вычисления оптимальной траектории движения, первый, второй, третий и четвертый выходы блока базы данных соединены соответственно с четвертым входом блока управления режимами, третьим входом блока вычисления оптимальной траектории движения, четвертым входом блока идентификатора и вторым входом блока адаптера.
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМИ ТОРМОЗАМИ ПОЕЗДА И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2540212C1 |
| Реверс-редуктор | 1959 |
|
SU125737A1 |
| Способ предохранения металлической шихты от насыщения серой | 1957 |
|
SU115750A1 |
| JP 5697757 B2, 08.04.2015 | |||
| WO 2014204870 A1, 24.12.2014. | |||

