Изобретение относится к железнодорожному транспорту и может быть использовано для автоматизации управления движением грузовых электровозов.
Известно устройство для регистрации параметров движения поезда, содержащее датчик пути и скорости, датчик меток времени, датчик давления в тормозной магистрали, выход датчика пути и скорости подключен к входам блока определения пройденного пути и блока определения скорости, второй вход блока определения скорости соединен с выходом датчика меток времени, входом блока определения текущего времени и входом элемента и, второй вход элемента и соединен с выходами элемента задания режима ручного управления и порогового элемента, выход элемента и соединен с входом элемента или, второй вход которого соединен с выходом блока определения пройденного пути, а выход - с входом управления регистратора. Информационные входы регистратора соединены с выходами датчика давления в тормозной магистрали, блока определения текущего времени и блока определения скорости. Выход блока определения скорости связан также с входом порогового элемента (см. RU 2041100, B61L 25/02, 1995). Известное устройство позволяет машинисту иметь оперативные сведения о параметрах движения поезда, о состоянии его тормозной системы на стоянке и при движении. Однако это устройство не позволяет осуществлять автоматизированное управление движением поезда с выбором энергооптимального алгоритма движения.
Наиболее близким по технической сущности является система автоматизированного ведения грузового поезда, содержащая вычислительный блок с подключенными к нему блоком памяти, измерительными средствами и средствами индикации параметров движения поезда, а также блоком управления режимом тяги и блоком управления режимом торможения, выходы которых соединены с цепями управления поездом, имеющая датчики тока якоря и возбуждения тяговых двигателей, датчик напряжения контактной сети, три блока высоковольтной гальванической развязки, вычислитель, блок моделирования динамических характеристик поезда, блок сравнения и блок формирования команд запрета управлением режимами тяги и торможением, при этом выход датчика тока якоря тягового двигателя через первый блок высоковольтной гальванической развязки соединен с первым входом вычислителя, со вторым входом которого через второй блок высоковольтной гальванической развязки соединен выход датчика тока возбуждения тягового двигателя, датчик напряжения контактной сети через третий блок высоковольтной гальванической развязки соединен с третьим входом вычислителя, выход которого подключен к первому входу блока моделирования динамических характеристик поезда, ко второму входу которого подключен выход блока памяти, выход блока моделирования динамических характеристик поезда соединен с входом блока сравнения, ко второму входу которого подключен блок формирования сигнала, соответствующего предельно допустимому усилию в поезде, выход блока сравнения соединен с входом блока формирования команд запрета управлением режимами тяги и торможением, выход которого подключен к соответствующим управляющим входам блока управления режимом тяги и блока управления режимом торможения (см. RU 2299144, B61L 3/00,). Это устройство, также как и приведенный выше аналог, позволяет машинисту иметь оперативные сведения о параметрах движения поезда, о состоянии его тормозной системы на стоянке и при движении, и кроме того, позволяет вести поезд по заданному расписанию движения и конкретному маршруту.
Также известны регуляторы скорости, встроенные в системы управления конкретными локомотивами ([1], [2], [3]). Эти регуляторы позволяют для локомотивов с плавным регулированием силы тяги и электрического торможения поддерживать заданное машинистом значение скорости с заданной в регуляторе скорости точностью, обычно+-2 или 3 км/ч. Однако эти устройства не позволяет обеспечивать необходимое качество регулирования скорости, а именно осуществляют регулирование скорости за счет скачкообразного изменения сил, что приводит к значительным продольно-динамическим силам в составе. Также эти регуляторы скорости реагируют на факт выхода скорости за заданный диапазон, что в сочетании с большой инерцией состава не позволяет оперативно реагировать на изменение профиля пути. Для примера можно рассмотреть переход поезда со спуска на подъем. Имеющиеся регуляторы скорости сначала допустят падение скорости ниже заданной на величину заданного коридора скорости (2 или 3 км/ч) за счет въезда на подъем, и только потом резко увеличат силу тяги, что приведет как к рывку в составе поезда, так и к перерасходу энергии на компенсацию провала скорости.
Технический результат предлагаемого решения заключается в том, что регулирование скорости для конкретного поезда, двигающегося по конкретному участку, осуществляется не только по отклонению, но в первую очередь с учетом профиля пути конкретного участка. Заявляемая система автоматизированного ведения грузового с регулятором скорости, адаптированным к конкретному участку движения позволяет автоматически поддерживать заданную скорость, учитывая не только реальную скорость поезда, но и прогноз по необходимой силе тяги или торможения, которые определяются из местоположения поезда на профиле пути и величине этого профиля. Это позволяет получать снизить продольные силы в составе поезда, расход электроэнергии за счет отсутствия провалов по скорости в начале подъема, а также повысить качество регулирования скорости.
Технический результат достигается тем, что в предлагаемую автоматизированного ведения грузового с регулятором скорости, адаптированным к конкретному участку движения, содержащую первый вычислительный блок с подключенными к нему блоком памяти, а также блоком управления режимом тяги и блоком управления режимом торможения, выходы которых соединены с цепями управления поездом, датчики тока якоря и возбуждения тяговых двигателей, датчик напряжения контактной сети, три блока высоковольтной гальванической развязки, второй вычислительный блок, блок моделирования динамических характеристик поезда, блок сравнения и блок формирования команд запрета управлением режимами тяги и торможением, при этом выход датчика тока якоря тягового двигателя через первый блок высоковольтной гальванической развязки соединен с первым входом второго вычислительного блока, со вторым входом которого через второй блок высоковольтной гальванической развязки соединен выход датчика тока возбуждения тягового двигателя, датчик напряжения контактной сети через третий блок высоковольтной гальванической развязки соединен с третьим входом второго вычислительного блока, выход которого подключен к первому входу блока моделирования динамических характеристик поезда, ко второму входу которого подключен выход блока памяти, выход блока моделирования динамических характеристик поезда соединен с входом блока сравнения, ко второму входу которого подключен блок формирования сигнала, соответствующего предельно допустимому усилию в поезде, выход блока сравнения соединен с входом блока формирования команд запрета управлением режимами тяги и торможением, выход которого подключен к соответствующим управляющим входам блока управления режимом тяги и блока управления режимом торможения, введены блок приемника сигнала географической координаты, выход которого подключен к входу блока определения местоположения поезда на профиле пути, а также блок расчета прогнозной силы тяги или торможения для конкретного поезда в конкретном месте профиля, при этом блок определения местоположения поезда на профиле пути и блок расчета прогнозной силы тяги или торможения для конкретного поезда в конкретном месте профиля взаимосвязаны с первым вычислительным блоком.
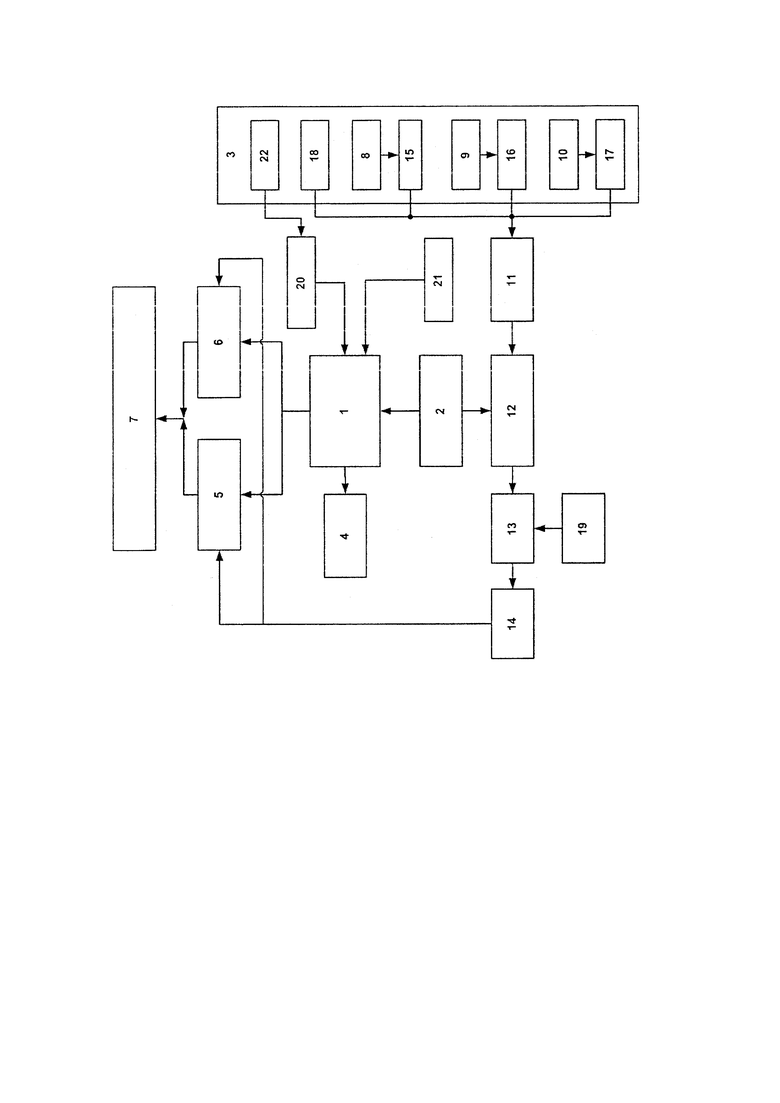
На чертеже представлена структурная схема предлагаемой системы автоматизированного ведения грузового с регулятором скорости, адаптированным к конкретному участку движения.
Система автоматизированного ведения грузового с регулятором скорости, адаптированным к конкретному участку движения содержит первый вычислительный блок 1 с подключенными к нему блоком 2 памяти, блоками определения местоположения поезда на профиле пути 20, получающего данные о географической координате от приемника сигналов спутниковой навигации 22, и блока расчета прогнозной силы тяги или торможения для конкретного поезда в конкретном месте профиля 21 и измерительными средствами 3 и средствами 4 индикации параметров движения поезда, блок 5 управления режимом тяги, блок 6 управления режимом торможения, выходы блока 5 управления режимом тяги и блока 6 управления режимом торможения соединены с цепями 7 управления локомотивом, датчик 8 тока якоря тяговых двигателей, датчик 9 тока возбуждения тяговых двигателей, датчик 10 напряжения контактной сети, второй вычислительный блок 11, блок 12 моделирования динамических характеристик поезда, блок 13 сравнения, блок 14 формирования команд запрета управлением режимами тяги и торможением, выход датчика 8 тока якоря тягового двигателя через первый блок 15 высоковольтной гальванической развязки соединен с первым входом вычислительного блока 11, со вторым входом которого через второй блок 16 высоковольтной гальванической развязки соединен выход датчика 9 тока возбуждения тягового двигателя, датчик 10 напряжения контактной сети через третий блок 17 высоковольтной гальванической развязки соединен с третьим входом блока 11, датчик 18 пути и скорости соединен с четвертым входом блока 11, выход которого подключен к первому входу блока 12 моделирования динамических характеристик поезда, ко второму входу которого подключен выход блока 2 памяти, выход блока 12 моделирования динамических усилий в составе поезда соединен с входом блока 13 сравнения, ко второму входу которого подключен блок 19 формирования сигнала, соответствующего предельно допустимому усилию в поезде, выход блока 13 сравнения соединен с входом блока 14 формирования команд запрета управлением режимами тяги и торможением, выход которого подключен к соответствующим управляющим входам блока 5 управления режимом тяги и блока 6 управления режимом торможения.
Если мы знаем профиль пути, то, получая местоположение от спутника, а профиль из базы данных, мы можем лучше осуществлять управление. Поэтому физически добавлены приемник GPS координат (22), а структурно два блока: один по координате помещает поезд на профиль (блок 20), а другой считает по профилю нужную силу тяги/торможения (21).
Вычислительный блок 1 на основе данных о профиле и плане пути, расписании движения, составе поезда, ограничениях скорости, хранящихся в блоке памяти 2, а также на основе оперативных данных о местоположении поезда, получаемых от блоков 22 и 20, рассчитывает и помещает в блок памяти 2 энергооптимальную траекторию движения поезда (желаемый прогноз по скорости), и на ее основе рассчитывает в блоке 21 прогноз по силе, которая необходима для реализации оптимальной траектории движения и которая соответствует местоположению поезда и конкретному профилю пути, хранящемуся в блоке памяти 2, на основе этой прогнозной силы блок 1 формирует задания на управление тягой локомотива или электрического торможения локомотива, или тормозами локомотива и состава, воздействуя с помощью блоков 5 и 6 на цепи управления локомотива 7. При формировании команд тяги и электрического торможения второй вычислительный блок 11 на основе данных о токах якоря 8 и возбуждении 9 тяговых двигателей, а также напряжении в контактной сети 10, поступающих через высоковольтную гальваническую развязку 15, и с учетом данных о скорости поезда, получаемых от датчика пути и скорости 18 рассчитывает фактическую силу тяги/торможения либо получает значение реализованной силы тяги или электрического торможения непосредственно от локомотива. На основе этих данных, а также данных о профиле и плане пути и составе поезда, поступающих из блока памяти 2, блок 12 моделирования динамических усилий в составе поезда рассчитывает максимальное реализованное усилие в составе. Сигнал с выхода блока 12 поступает на блок сравнения 13, в то время как на второй вход блока сравнения 13 поступает сигнал о максимально допустимой силе тяги/торможения в данной точке профиля. На выходе блока 13 формируется сигнал управления тягой или тормозами как минимальный из желаемого и допустимого по динамике, а также соответствует расчетным силам, необходимым для ведения поезда по конкретному профилю пути
Список литературы:
1. Савоськин А.Н., Пудовиков О.Е. Новая структура регулятора скорости для грузовых локомотивов / Известия Петербургского университета путей сообщения, выпуск №2 / 2007
2. Курихин А. Локомотивы «Ермак» и «Дончак», Железнодорожная техника, 06/11/2013
3. Савоськин А.И., Пудовиков О.Е. Методические указания к лабораторным работам по дисциплине «Автоматизированные системы управления подвижным составом» Часть I -М.:МИИТ,2002.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВЕДЕНИЯ ГРУЗОВОГО ПОЕЗДА ПО ОПЕРАТИВНОМУ РАСПИСАНИЮ ДВИЖЕНИЯ | 2013 |
|
RU2540683C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВЕДЕНИЯ ГРУЗОВОГО ПОЕЗДА | 2005 |
|
RU2299144C2 |
| Автономная система информирования машиниста с функцией электронного маршрута | 2016 |
|
RU2694640C2 |
| УСТРОЙСТВО ПОСТРОЕНИЯ ЭНЕРГОСБЕРЕГАЮЩИХ ГРАФИКОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2011 |
|
RU2487036C1 |
| Устройство построения прогнозных энергосберегающих графиков движения поездов | 2018 |
|
RU2685368C1 |
| Система для контроля и регулирования мощности и энергии, расходуемой транспортной системой | 2023 |
|
RU2811608C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| Система поддержания интервала разграничения между последовательно движущимися поездами | 2024 |
|
RU2839168C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ПОЕЗДНОЙ РАБОТОЙ НАПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНОЙ СЕТИ В УСЛОВИЯХ ПРОВЕДЕНИЯ РЕМОНТНЫХ РАБОТ | 2012 |
|
RU2501697C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2006 |
|
RU2320498C1 |
Изобретение относится к железнодорожной автоматике для управления движением грузовых электровозов. Система включает первый и второй вычислительные блоки, блок памяти, блок определения местоположения поезда на профиле пути, приемник сигналов спутниковой навигации, блок расчета прогнозной силы тяги или торможения для конкретного поезда в конкретном месте профиля, измерительные средства, средства индикации параметров движения поезда, блок управления режимом тяги, блок управления режимом торможения, цепи управления локомотивом, датчик тока якоря тяговых двигателей, датчик тока возбуждения тяговых двигателей, датчик напряжения контактной сети, блок моделирования динамических характеристик поезда, блок сравнения, блок формирования команд запрета управления режимами тяги и торможением, первый, второй и третий блоки высоковольтной гальванической развязки, датчик пути и скорости, блок формирования сигнала, соответствующего предельно допустимому усилию в поезде. Достигается возможность регулирования скорости поезда с учетом профиля пути конкретного участка. 1 ил.
Система автоматизированного ведения грузового поезда, содержащая первый вычислительный блок с подключенными к нему блоком памяти, а также блоком управления режимом тяги и блоком управления режимом торможения, выходы которых соединены с цепями управления поездом, датчики тока якоря и возбуждения тяговых двигателей, датчик напряжения контактной сети, три блока высоковольтной гальванической развязки, второй вычислительный блок, блок моделирования динамических характеристик поезда, блок сравнения и блок формирования команд запрета управления режимами тяги и торможением, при этом выход датчика тока якоря тягового двигателя через первый блок высоковольтной гальванической развязки соединен с первым входом второго вычислительного блока, со вторым входом которого через второй блок высоковольтной гальванической развязки соединен выход датчика тока возбуждения тягового двигателя, датчик напряжения контактной сети через третий блок высоковольтной гальванической развязки соединен с третьим входом второго вычислительного блока, выход которого подключен к первому входу блока моделирования динамических характеристик поезда, ко второму входу которого подключен выход блока памяти, выход блока моделирования динамических характеристик поезда соединен с входом блока сравнения, ко второму входу которого подключен блок формирования сигнала, соответствующего предельно допустимому усилию в поезде, выход блока сравнения соединен с входом блока формирования команд запрета управления режимами тяги и торможением, выход которого подключен к соответствующим управляющим входам блока управления режимом тяги и блока управления режимом торможения, отличающаяся тем, что в нее введены блок приемника сигнала географической координаты, выход которого подключен к входу блока определения местоположения поезда на профиле пути, а также блок расчета прогнозной силы тяги или торможения для конкретного поезда в конкретном месте профиля, при этом блок определения местоположения поезда на профиле пути и блок расчета прогнозной силы тяги или торможения для конкретного поезда в конкретном месте профиля взаимосвязаны с первым вычислительным блоком.
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВЕДЕНИЯ ГРУЗОВОГО ПОЕЗДА | 2005 |
|
RU2299144C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УСОВЕРШЕНСТВОВАНИЯ ТЕХНИКИ ВОЖДЕНИЯ ПОЕЗДОВ И СНИЖЕНИЯ РАСХОДА ТОПЛИВА | 2006 |
|
RU2409484C2 |
| EA 201500498 A1, 30.12.2016 | |||
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА И ЕДИНАЯ КОМПЛЕКСНАЯ СИСТЕМА (ЕКС) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2355596C1 |
| СПОСОБ ВЫБОРА НАИБОЛЕЕ ЭКОНОМИЧНОГО РЕЖИМА ДВИЖЕНИЯ ПОЕЗДА НА ЗАДАННОМ УЧАСТКЕ ПУТИ | 2003 |
|
RU2237589C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Устройство для хранения рулонных документов | 1983 |
|
SU1136969A1 |

