Изобретение относится к железнодорожному транспорту и может быть использовано для автоматизации управления движением поездов.
Известно устройство для автоматического контроля скорости, остановки и обеспечения эффективного и безопасного управления движением железнодорожного транспорта. Устройство имеет связь с железнодорожным путем, вдоль полотна которого расставлены вехи с постоянными или произвольно выбранными интервалами между собой, на входе каждого дорожного участка вехи расположены так, чтобы они образовывали репер идентификации (опознавания) дорожного участка и инициирования устройства, при этом средства обработки сигналов, выданных средствами обнаружения вех, имеют в своем составе блок хранения программы движения поезда в форме кодов и узел когерентности (связи) с безопасным "окном" спектра разделения сигналов, систему контроля превышения скорости, предназначенную для управления органами экстренного торможения поезда, если указанные сигналы разделяются друг от друга на расстояние, превышающее длину вышеуказанного "окна" спектра безопасного расхождения этих сигналов (RU 2068361, B61L 3/20, 27.10.96).
Однако для функционирования известного устройства необходимо расположение вех вдоль железнодорожного полотна, что усложняет систему управления движением транспорта, снижает ее надежность и не позволяет обеспечить высокую точность управления движением поезда.
Наиболее близким к изобретению является устройство управления движением электропоезда, реализующее способ регулирования движения поездов. Устройство содержит датчик пути и скорости, выход которого подключен к блоку определения скорости, генератор временных меток, выход которого подключен к блоку определения текущего времени и второму входу блока определения скорости, датчик давления, установленный на тормозной магистрали, пульт управления, подключенный к цепям управления электропоезда, блок управления режимом тяги и блок управления режимом торможения, вычислительный блок, блок памяти, тактовый генератор, контроллер, два дешифратора, блок управления, три блока сопряжения, блок индикации и блок речевого информатора, причем блок определения скорости, генератор временных меток, блок определения текущего времени, датчик давления и пульт управления подключены соответственно к первому, второму, третьему, четвертому и пятому входам первого блока сопряжения, выход которого соединен с первым входом вычислительного блока, к второму, третьему и четвертому входам которого подключены соответственно блок управления, блок памяти и тактовый генератор, причем тактовый генератор соединен с седьмым входом первого блока сопряжения, блок управления через контроллер подключен к блоку памяти, первый выход вычислительного блока через второй блок сопряжения соединен с блоком индикации, второй выход вычислительного блока через третий блок сопряжения соединен с блоком речевого информатора, третий выход вычислительного блока через первый дешифратор подключен к блоку управления режимом тяги, четвертый выход вычислительного блока через второй дешифратор подключен к блоку управления режимом торможения, выходы блока управления режимом тяги, блока управления режимом торможения подключены к цепям управления электропоездом, выход блока управления режимом тяги подключен также к шестому входу первого блока сопряжения, обеспечивающее автоматизацию управления движением поезда, включая пуск и разгон, выбор режима ведения поезда на перегонах, подтормаживание при выполнении ограничений скорости, точное торможение под сигналы, требующие снижения скорости (желтый, красно-желтый, красный), а также отображение информации о текущей и рациональной динамике движения электропоезда (RU №2213669, B60L 15/40, 10.10.03). Это техническое решение обеспечивает повышение точности выполнения графика движения поезда, снижение расхода энергии на тягу поезда, снижение психофизиологической нагрузки на машиниста.
Недостатком этого технического решения является пониженная пропускная способность, обусловленная тем, что темп снижения скорости при получении по каналам автоматической локомотивной сигнализации кодового сигнала с большим скоростным ограничением всегда осуществляют из условия отработки заложенной в блоке памяти «тормозной кривой» для достижения новой разрешенной скорости к моменту достижения локомотивом поезда конца текущего блок-участка.
Технический результат изобретения заключается в повышении пропускной способности без ухудшения безопасности движения поездов.
В части способа технический результат достигается тем, что в способе регулирования движения поездов различных категорий на участках, оборудованных устройствами многозначной автоматической локомотивной сигнализации непрерывного типа, по которому при движении поезда на зеленый огонь путевого светофора до момента получения локомотивными устройствами автоматической локомотивной сигнализации кода, требующего определенного ограничения скорости, ограничение максимальных скоростей движения поездов осуществляют в зависимости от категории поезда, а при приеме локомотивными устройствами автоматической локомотивной сигнализации любого из кодов, требующих определенного ограничения скорости, скорость поезда снижают до скорости, задаваемой принятым кодовым сигналом автоматической локомотивной сигнализации, согласно изобретению торможение осуществляют с минимально допустимой, в зависимости от категории поезда по условиям обеспечения безопасности движения, интенсивностью, а координату начала торможения определяют как разность расстояния от текущей координаты локомотива до координаты начала участка движения с установленной допустимой скоростью и отношения разности квадратов текущей скорости и скорости на участке движения с установленной допустимой скоростью к удвоенной минимально допустимой по условиям обеспечения безопасности движения интенсивностью торможения поезда. Гарантированная остановка поезда перед препятствием на пути его движения обеспечивается заданием нулевой скорости на участке движения с установленной допустимой скоростью.
При расчете минимально допустимой по условиям обеспечения безопасности движения интенсивности торможения поезда учитывают ряд показателей: максимальное замедление, тормозной путь, время срабатывания тормозных механизмов, диапазон и алгоритм изменения тормозных усилий, падение эффективности вследствие продолжительной работы (нагрева).
Реализация способа заключается в следующем (см. чертеж).
В блок 6 приоритетного управления на локомотивах 8 поступает информация с центрального пункта 9 диспетчерского управления по радиоканалу 10 на локомотивный приемопередатчик 5, с выхода которого и с выхода локомотивного приемника 1 кодовых сигналов автоматической локомотивной сигнализации из рельсовых цепей блок-участков 2 о временных ограничениях скорости, о текущих ограничениях по максимальной скорости движения поезда, с блока 3 информация о текущей координате местонахождения поезда и с блока 4 о постоянных координатах начала участка ограничения скорости по маршруту следования поезда, которая предварительно вводится с учетом таких категорий, как: грузовые, пригородные пассажирские, пассажирские дальнего следования и/или высокоскоростные пассажирские. На основании этих данных блок 6 приоритетного управления рассчитывает минимально допустимую по условиям обеспечения безопасности движения, интенсивность торможения поезда. При расчете минимально допустимой по условиям обеспечения безопасности движения интенсивности торможения поезда учитывают ряд показателей: максимальное замедление, тормозной путь, время срабатывания тормозных механизмов, диапазон и алгоритм изменения тормозных усилий, падение эффективности вследствие продолжительной работы (нагрева). Эти показатели задаются по информации с соответствующих датчиков или вручную машинистом в зависимости от имеющегося оборудования.
Так как текущие координаты локомотива 8 поезда известны, а координаты начала участка ограничения скорости задаются по информации с центрального пункта 9 диспетчерского управления или постоянны (например, это может быть зона расположения некоторых переездов, мостов, крутых поворотов на перегонах и т.д.), блок 6 приоритетного управления определяет координату (момент) включения блока 7 управления торможением поезда, чтобы при его включении скорость поезда была максимально допустимой при достижении поездом координаты начала участка ограничения как разность расстояния от текущей координаты локомотива до координаты начала участка движения с установленной допустимой скоростью и отношения разности квадратов текущей скорости и скорости на участке движения с установленной допустимой скоростью к удвоенной минимально допустимой по условиям обеспечения безопасности движения интенсивностью торможения поезда.
Таким образом, блок 6 приоритетного управления обеспечивает возможность движения на всем пути следования поезда с максимально допустимой из задаваемых ограничениями на каждом участке пути разрешенной скоростью и минимально допустимой по условиям обеспечения безопасности движения интенсивностью торможения при переходе с участка с большей разрешенной скоростью на участок с меньшей разрешенной скоростью и информирует о ней и о типе использованного ограничения блок 7 управления торможением поезда. В зависимости от вводимых и текущих данных координаты и скорости блок 6 приоритетного управления торможением поезда выбирает режим снижения скорости, если текущая скорость превышает допустимую, т.е. каждый раз обеспечивается включение торможения при фактической скорости «в последний момент», когда еще возможно достижение заданной скорости с начала заданного участка пути. Если поезд движется с заданной скоростью, превышающей разрешенную ограничениями скорость движения на заданном участке пути впереди движения локомотива 8, блок 6 определяет координату начала торможения при этой скорости движения поезда для достижения разрешенной ограничениями скорости движения на заданном участке пути с начала участка ограничения скорости при использовании минимально допустимой, по условиям обеспечения безопасности движения интенсивности торможения поезда. Если до достижения локомотивом рассчитанной координаты начала торможения под действием какой-либо команды скорость локомотива 8 изменится или появится новый участок пути с ограниченной скоростью, блок 6 рассчитывает новую координату начала торможения.
По сравнению с прототипом это повышает среднюю скорость движения поездов по участку диспетчерского управления и, следовательно, повышает пропускную способность участка диспетчерского управления без ухудшения условий по безопасности движения поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ | 2012 |
|
RU2508218C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА ПРИНУДИТЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ У ПУТЕВЫХ УПОРОВ ПРИ ДВИЖЕНИИ НА ТУПИКОВЫХ ПУТЯХ СТАНЦИИ | 2013 |
|
RU2529561C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПО УЧАСТКУ ЖЕЛЕЗНОЙ ДОРОГИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2510346C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2756140C1 |
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| СПОСОБ И КОМПЛЕКСНАЯ СИСТЕМА БЕЗОПАСНОСТИ (КСБ) ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЦЕЛЬНЫМ ТОРМОЖЕНИЕМ ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2392133C1 |
| Устройство для регулирования движения поездов | 2018 |
|
RU2679795C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| Способ управления поездами при их последовательном отправлении со станции | 2021 |
|
RU2757131C1 |
Изобретение относится к железнодорожному транспорту и может быть использовано для автоматизации управления движением поездов. Способ регулирования движения поездов осуществляют в зависимости от категории поезда. При приеме локомотивными устройствами автоматической локомотивной сигнализации кодов, требующих определенного ограничения скорости, скорость поезда снижают до скорости, задаваемой принятым кодовым сигналом автоматической локомотивной сигнализации. Торможение осуществляют с минимально допустимой в зависимости от категории поезда интенсивностью. Координату начала торможения определяют как разность расстояния от текущей координаты локомотива до координаты начала участка движения с установленной допустимой скоростью и отношения разности квадратов текущей скорости и скорости на участке движения с установленной допустимой скоростью к удвоенной минимально допустимой, по условиям обеспечения безопасности движения, интенсивностью торможения поезда. Решение направлено на повышение пропускной способности движения поездов. 1 ил.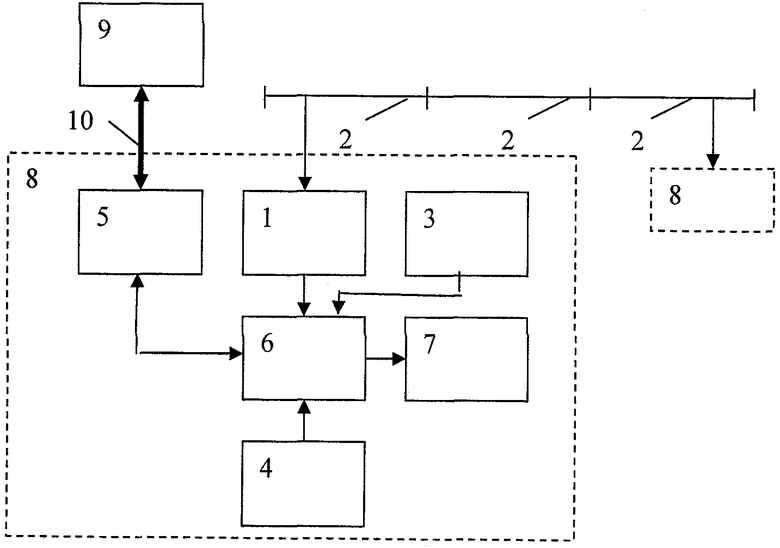
Способ регулирования движения поездов различных категорий на участках, оборудованных устройствами многозначной автоматической локомотивной сигнализации непрерывного типа, по которому при движении поезда на зеленый огонь путевого светофора до момента получения локомотивными устройствами автоматической локомотивной сигнализации кода, требующего определенного ограничения скорости, ограничение максимальных скоростей движения поездов осуществляют в зависимости от категории поезда, а при приеме локомотивными устройствами автоматической локомотивной сигнализации любого из кодов, требующих определенного ограничения скорости, скорость поезда снижают до скорости, задаваемой принятым кодовым сигналом автоматической локомотивной сигнализации, отличающийся тем, что торможение осуществляют с минимально допустимой, в зависимости от категории поезда по условиям обеспечения безопасности движения, интенсивностью, а координату начала торможения определяют как разность расстояния от текущей координаты локомотива до координаты начала участка движения с установленной допустимой скоростью и отношения разности квадратов текущей скорости и скорости на участке движения с установленной допустимой скоростью к удвоенной минимально допустимой, по условиям обеспечения безопасности движения, интенсивностью торможения поезда.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| Цанговый зажимной патрон для токарных и револьверных станков | 1950 |
|
SU92641A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 7770847 B1, 08.10.2010 | |||
| Устройство для управления скоростью движения транспортного средства | 1975 |
|
SU552226A1 |

