Изобретение относится к радиолокации и может быть использовано в радиолокационных системах (РЛС), устанавливаемых на подвижных носителях (летательных аппаратах, наземных или морских подвижных механизмах) и предназначенных для измерения угловых координат радиоконтрастных объектов (РКО) и угловых скоростей их линии визирования.
Известны: оптимальное радиолокационное угломерное устройство [Максимов М.В., Меркулов В.И. Радиоэлектронные следящие системы. - М.: Радио и связь, 1990, стр.201-207]; угломер радиолокационной головки самонаведения [Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. - М.: Радио и связь, 1997, стр.275-280]; двухдиапазонный следящий измеритель [Патент РФ №2181899]; угломер бортовой радиолокационной станции [Антипов В.Н., Исаев С.А., Лавров А.А., Меркулов В.И. Многофункциональные радиолокационные комплексы истребителей. - М.: Воениздат, 1994, стр.106-117].
К недостаткам первого, второго и четвертого из перечисленных устройств можно отнести либо низкую точность фильтрации при их использовании в широкодиапазонных РЛС при нестационарных шумах измерений, либо низкую точность и устойчивость при сопровождении высокоманевренных РКО, что присуще второму и третьему из перечисленных устройств.
Известны также способы и устройства сопровождения РКО по направлению и оценивания их пеленгов моноимпульсными РЛС [Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. ч.1, ч.2. - М.: Радио и связь, 1997, стр.261-298]; [Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, стр.216-224]; моноимпульсное устройство сопровождения РКО по направлению [Патент США №5014064, кл. G 01 S 13/00 или 342-152, 07.05.1991].
Основным недостатком указанных устройств является сильное влияние друг на друга горизонтального и вертикального каналов пеленгации, что приводит к значительным ошибкам пеленгации.
Из известных технических решений наиболее близким (прототипом) является моноимпульсное устройство сопровождения по направлению (Monopulse tracking apparatus) [Патент США №5014064, кл. G 01 S 13/00 или 342-152, 07.05.1991]. Это устройство, представляющее собой следящую систему с астатизмом второго порядка, обеспечивает прием отраженных от РКО сигналов, формирование по ним ошибок пеленгации РКО в горизонтальной и вертикальной плоскостях, оценивание значений углов пеленга РКО, выдаваемых потребителям информации, и формирование сигналов управления антенной. Оно содержит передатчик, антенну, механически соединенную с приводом антенны в горизонтальной плоскости и приводом антенны в вертикальной плоскости, на которых закреплены датчики углового положения антенны соответственно в горизонтальной и вертикальной плоскостях; приемное устройство; спецвычислитель.
Главный недостаток прототипа связан с тем, что в нем оценивание значений углов пеленга осуществляется в антенной системе координат, в то время как большинство других устройств носителя (например, навигационное устройство), а также потребители информации работают в земной неподвижной системе координат. Это влечет за собой внесение достаточно больших ошибок, доходящих до нескольких градусов, при пересчете оцененных значений углов пеленга в координаты РКО в земной системе координат. Кроме этого, недостатком прототипа является низкая точность и устойчивость сопровождения РКО в случае маневров РКО или носителя, связанная с тем, что прототип имеет астатизм второго порядка, а в таких системах любой маневр с переменным ускорением приводит к появлению нарастающих ошибок сопровождения и, как следствие, к срыву слежения [Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспективных бортовых радиолокационных систем. Возможности и ограничения. - М.: ИПРЖР, 2002, стр.23].
Таким образом, задачей изобретения является повышение точности и устойчивости работы моноимпульсного радиолокационного устройства сопровождения по направлению.
Поставленная задача достигается тем, что в моноимпульсное радиолокационное устройство сопровождения по направлению, содержащее антенну, механически соединенную с приводом антенны в горизонтальной плоскости и приводом антенны в вертикальной плоскости, на которых закреплены два датчика углового положения антенны (ДУЛА) - один для измерения угла отклонения антенны от строительной оси платформы, на которой закреплена антенна, в горизонтальной плоскости (ДУПАгп), другой - для измерения угла отклонения антенны в вертикальной плоскости (ДУПАвп);
приемное устройство (ПРМУ), первый вход которого соединен с первым выходом антенны, на котором формируют сигнал ошибки пеленгации в горизонтальной плоскости, а второй вход ПРМУ соединен с вторым выходом антенны, на котором формируют сигнал ошибки пеленгации в вертикальной плоскости;
дополнительно введены:
первый вычислитель, первый вход которого соединен с первым выходом ПРМУ (на этом выходе ПРМУ формируется усиленный и отфильтрованный от шумов сигнал ошибки пеленгации в горизонтальной плоскости), а второй вход первого вычислителя соединен с выходом ДУПАвп;
первый сумматор, первый вход которого соединен с выходом ДУПАгп, а второй вход - с выходом первого вычислителя;
второй сумматор, первый вход которого соединен с вторым выходом ПРМУ (на этом выходе ПРМУ формируется усиленный, отфильтрованный от шумов и преобразованный в цифровую форму сигнал ошибки пеленгации в вертикальной плоскости), а второй вход - с выходом ДУПАвп;
второй вычислитель, первый вход которого соединен с выходом первого сумматора, второй вход - с выходом второго сумматора, третий вход - с первым выходом введенного датчика углового положения платформы (ДУПЛ), на которой установлена антенна;
третий вычислитель, первый вход которого соединен с выходом ДУПАгп, второй вход - с выходом ДУПАвп, третий вход - с первым выходом ДУПЛ, четвертый вход - с вторым выходом ДУПЛ, пятый и шестой входы - соответственно с первым и вторым выходами введенного датчика курса, седьмой и восьмой входы - соответственно с первым и вторым выходами введенного датчика тангажа, девятый и десятый входы - соответственно с первым и вторым выходами введенного датчика крена;
четвертый вычислитель, первый и второй входы которого соединены соответственно с выходом второго вычислителя и первым выходом третьего вычислителя;
пятый вычислитель, вход которого соединен с выходом четвертого вычислителя;
шестой вычислитель, вход которого соединен с выходом пятого вычислителя, а первый выход с потребителями информации;
седьмой вычислитель, вход которого соединен с вторым выходом шестого вычислителя;
восьмой вычислитель, первый вход которого соединен с выходом седьмого вычислителя, а второй вход - с вторым выходом третьего вычислителя;
девятый вычислитель, первый вход которого соединен с выходом восьмого вычислителя, а второй вход - с первым выходом ДУПЛ;
десятый вычислитель, первый вход которого соединен с выходом ДУПАгп, второй вход - с выходом ДУПАвп, третий - с выходом девятого вычислителя, четвертый вход - с третьим выходом третьего вычислителя, первый выход - с входом привода антенны в горизонтальной плоскости, второй выход - с входом привода антенны в вертикальной плоскости;
запоминающее устройство (ЗУ) соединено с третьим, шестым и десятым вычислителями по линиям приемо-передачи данных и управления; ЗУ также имеет вход для записи данных от внешнего источника.
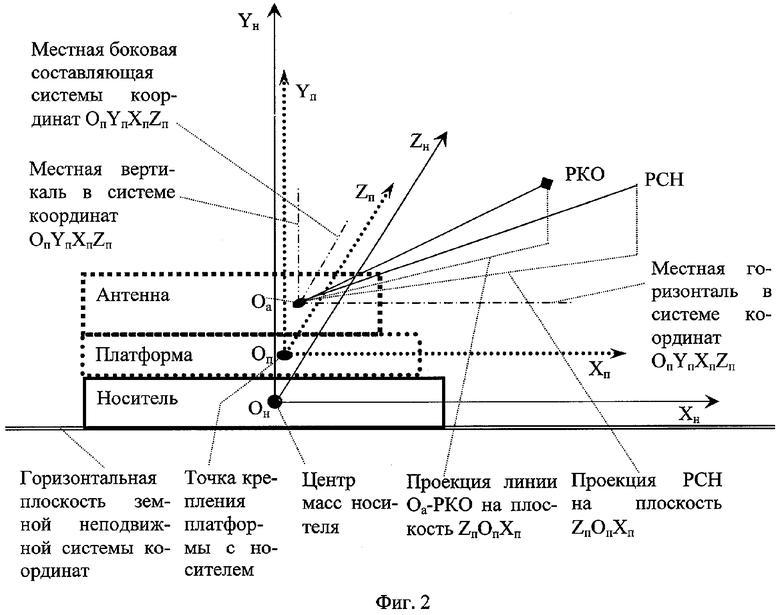
На фиг.1 изображена структурная схема заявленного моноимпульсного радиолокационного устройства сопровождения по направлению, где 1 - привод антенны в горизонтальной плоскости; 2 - датчик углового положения антенны горизонтальной плоскости (ДУПАгп); 3 - первый сумматор; 4 - датчик углового положения платформы (ДУПП); 5 - датчик курса; 6 - датчик тангажа; 7 - датчик крена; 8 - антенна; 9 - приемное устройство (ПРМУ); 10 - первый вычислитель; 11 - второй вычислитель; 12 - третий вычислитель; 13 - привод антенны в вертикальной плоскости; 14 - датчик углового положения антенны вертикальной плоскости (ДУПАвп); 15 - второй сумматор; 16 - четвертый вычислитель; 17 - пятый вычислитель; 18 - запоминающее устройство (ЗУ); 19 - шестой вычислитель; 20 - седьмой вычислитель; 21 - восьмой вычислитель; 22 - девятый вычислитель; 23 - десятый вычислитель; РКО - условно отображен радиоконтрастный объект.
На фиг.2 схематично отображены используемые в заявленном устройстве системы координат. На фигуре обозначено:
носитель - любой подвижный механизм (например: машина, корабль), с центром масс в точке Он;
платформа - любой механизм, закрепленный на носителе в точке Оп и имеющий одну степень свободы - вращение вокруг оси ОпYп;
антенна - типовая антенна современной радиолокационной станции с центром в точке Оа;
ОнХнYнZн - земная, связанная с носителем, система координат, ось ОнХн которой направлена вдоль строительной оси носителя, ось ОнYн - местная вертикаль; ось ОнZн - образует левую систему координат;
OпXпYпZп - связанная с платформой система координат, ось ОпХп которой направлена вдоль строительной оси платформы, ось OпYп - вертикаль к плоскости носителя из точки крепления платформы к носителю; ось OпZп - образует левую систему координат;
линия Оа-РСН - линия, соединяющая точки Оа и РСН, перпендикулярна зеркалу антенны; определяет равносигнальное направление (РСН) антенны;
линия Оа-РКО - линия, соединяющая точки Оа и РКО, определяет положение РКО.
Функционально моноимпульсное радиолокационное устройство сопровождения по направлению состоит из:
- моноимпульсной антенны 8, перемещаемой в пространстве приводом антенны в горизонтальной плоскости 1 и приводом антенны в вертикальной плоскости 13, и формирующей два разностных сигнала ошибок пеленгации: Δxzп и Δy(xz)п - соответственно в горизонтальной и вертикальной плоскостях;
- двухканального приемного устройства (ПРМУ) 9, обеспечивающего усиление, фильтрацию от шумов и преобразование в цифровую форму разностных сигналов ошибок пеленгации в обеих плоскостях;
- первого 2 и второго 14 датчиков углового положения антенны, первого 3 и второго 15 сумматоров, первого вычислителя 10, обеспечивающих формирование пеленгов РКО в связанной с платформой системе координат OпXпYпZп;
- датчика углового положения платформы 4, датчика курса 5, датчика тангажа 6, датчика крена 7, второго 11, третьего 12, четвертого 16 и пятого 17 вычислителей, обеспечивающих формирование пеленгов РКО в связанной с носителем системе координат ОнХнYнZн;
- шестого вычислителя 19, обеспечивающего оценивание пеленгов РКО и угловых скоростей линии визирования РКО в двух плоскостях в связанной с носителем системе координат ОнХнYнZн;
- третьего 12, седьмого 20, восьмого 21 и девятого 22 вычислителей, обеспечивающих оценивание координат РКО в связанной с платформой системе координат OпXпYпZп;
- десятого вычислителя 23, обеспечивающего формирование сигналов управления антенной в двух плоскостях;
- запоминающее устройство 18, обеспечивающее хранение констант, начальных и промежуточных данных.
В качестве приводов антенны в горизонтальной 1 и вертикальной плоскостях 13 используются типовые приводы, применяемые в современных РЛС.
В качестве датчиков углового положения антенны (2, 14), датчика углового положения платформы 4, датчиков курса 5, тангажа 6 и крена 7 используются типовые датчики, применяемые в современных РЛС и навигационных системах.
В качестве антенны 8 используется моноимпульсная типовая антенна, применяемая в современных РЛС.
В качестве ПРМУ 9 используется типовое приемное устройство современной РЛС.
В качестве первого 3 и второго 15 сумматоров, и всех, с первого по десятый, вычислителей используются типовые вычислители, применяемые в настоящее время в РЛС.
В качестве ЗУ 18 используется типовое ЗУ, обеспечивающее ввод, запоминание и вывод данных.
Заявленное устройство работает следующим образом.
До начала его эксплуатации в ЗУ 18 вводят и запоминают:
- значения констант αг, βг, αв, βв, Кг1, Кг2, Кг3, Кв1 Кв2, Кв3, первые четыре из которых являются весовыми коэффициентами в фильтрах оценивания параметров РКО, а остальные - весовыми коэффициентами, определяющими вклад ошибок пеленгации, угловых скоростей линии визирования РКО и угловых скоростей вращения платформы в соответствующих плоскостях. Величины первых четырех констант назначают из условия обеспечения устойчивости функционирования α-β-фильтра. Величины последних шести констант назначают исходя из результатов моделирования процесса управления конкретной антенной конкретными приводами;
- значение временного интервала Δt между (k-1)-м и k-м моментами времени.
После включения моноимпульсного радиолокационного устройства сопровождения по направлению от внешних устройств в ЗУ 18 вводят:
- оцененные на момент времени k-1 в системе координат ОнYнХнZн значения пеленгов  PKO в горизонтальной и
PKO в горизонтальной и  вертикальной плоскостях соответственно и угловых скоростей линии визирования PKO
вертикальной плоскостях соответственно и угловых скоростей линии визирования PKO  ,
,  в этих же плоскостях;
в этих же плоскостях;
- экстраполированные на k-й момент времени значения пеленгов ϕркогнэ(k) PKO в горизонтальной и ϕрковнэ(k) вертикальной плоскостях соответственно упомянутой системы координат;
- значения на момент времени k-1 угловых скоростей ωпх(k-1), ωпв(k-1) и ωпz(k-1) вращения платформы соответственно относительно осей Хп, Yп и Zп системы координат OпXпYпZп;
- значения на момент времени k-1 угловых скоростей ωпг(k-1), ωпв(k-1) вращения платформы соответственно в горизонтальной и вертикальной плоскостях системы координат ОнХнYнZн.
После того как передающее устройство (в состав заявленного устройства не входит; отсутствие передающего устройства в составе заявленного устройства связано с тем, что оно может работать пассивным способом, принимая радиосигналы от источника радиоизлучения) излучит радиосигналы, антенна 8 принимает отраженные от PKO радиосигналы, при этом на разностных выходах суммарно-разностного моста она формирует два сигнала ошибок пеленгации: Δxzп - для горизонтальной плоскости и Δy(xz)п - для вертикальной плоскости.
Значение сигнала ошибки пеленгации Δxzп пропорционально углу между проекциями на плоскость XпZп равносигнального направления (РСН) антенны и линии Оа-РКО (см. фиг.2), где Хп, Zп - оси системы координат OпXпYпZп. Значение сигнала ошибки пеленгации Δy(xz)п пропорционально углу между проекциями на вертикальную плоскость системы координат OпXпYпZп равносигнального направления антенны и линии Оа-РКО. Упомянутые сигналы ошибок пеленгации Δxzп и Δy(xz)п соответственно с первого и второго выходов антенны 8 поступают на первый и второй входы ПРМУ 9, которое их усиливает, фильтрует от шумов и преобразует в цифровую форму.
С первого выхода ПРМУ 9 значение ошибки пеленгации Δxzп поступает на первый вход первого вычислителя 10. С второго выхода ПРМУ 9 значение ошибки пеленгации Δy(xz)п поступает на первый вход второго сумматора 15.
ДУПАгп 2 измеряет значение углового положения антенны ϕaxzп в плоскости XпZп упомянутой системы координат, которое с его выхода поступает на первый вход первого сумматора 3, на первый вход третьего вычислителя 12 и на первый вход десятого вычислителя 23.
ДУПАвп 14 измеряет значение углового положения антенны ϕay(xz)п в плоскости, проходящей через ось Yп и проекцию РСН на плоскость XпZп. Измеренное значение углового положения антенны ϕay(xz)п с выхода ДУПАвп 14 поступает на второй вход первого вычислителя 10, на второй вход второго сумматора 15, на второй вход третьего вычислителя 12, на второй вход третьего вычислителя 12 и на второй вход десятого вычислителя 23.
Второй сумматор 15 суммирует значения углового положения антенны ϕay(xz)п и значение ошибки пеленгации Δy(xz)п, формируя этим значение пеленга ϕрковп РКО в вертикальной плоскости упомянутой системы координат, которое с его выхода поступает на второй вход второго вычислителя 11.
Первый вычислитель 10 по формуле
вычисляет значение ошибки пеленгации  в плоскости XпZп, с учетом наклона антенны в вертикальной плоскости упомянутой системы координат. С выхода первого вычислителя 10 полученный сигнал ошибки пеленгации поступает на второй вход первого сумматора 3, который его суммирует со значением углового положения антенны ϕaxzп, формируя этим значение пеленга ϕpkoxzп PKO в плоскости XпZп упомянутой системы координат, которое с его выхода поступает на первый вход второго вычислителя 11.
в плоскости XпZп, с учетом наклона антенны в вертикальной плоскости упомянутой системы координат. С выхода первого вычислителя 10 полученный сигнал ошибки пеленгации поступает на второй вход первого сумматора 3, который его суммирует со значением углового положения антенны ϕaxzп, формируя этим значение пеленга ϕpkoxzп PKO в плоскости XпZп упомянутой системы координат, которое с его выхода поступает на первый вход второго вычислителя 11.
ДУПП 4 измеряет значение угла положения платформы ϕпг - угла между строительной осью платформы и строительной осью носителя в горизонтальной плоскости системы координат OнXнYнZн и скорость вращения платформы ωпг в этой же плоскости. Измеренное значение углового положения платформы ϕпг с первого выхода ДУПП 4 поступает на третий вход второго вычислителя 11, на третий вход третьего вычислителя 12 и на второй вход девятого вычислителя 22. Измеренное значение скорости вращения платформы ωпг с второго выхода ДУПП 4 поступает на четвертый вход третьего вычислителя 12.
Второй вычислитель 11 по формулам
формирует вектор поворота П, который с выхода второго вычислителя 11 поступает на первый вход четвертого вычислителя 16.
Датчик курса 5 измеряет значения угла курса ψ носителя и скорости ωψ его изменения, которые с его, соответственно, первого и второго выходов поступают на пятый и шестой входы третьего вычислителя 12.
Датчик тангажа 6 измеряет значения угла тангажа ϑ носителя и скорости ωϑ его изменения, которые с его, соответственно, первого и второго выходов поступают на седьмой и восьмой входы третьего вычислителя 12.
Датчик крена 7 измеряет значения угла крена γ носителя и скорости ωγ его изменения, которые с его, соответственно, первого и второго выходов поступают на девятый и десятый входы третьего вычислителя 12.
Третий вычислитель 12 по формулам
формирует три матрицы поворотов Мх, My, Mz и три матрицы обратных поворотов Мxo, Myo, Mzo, где γ - угла крена носителя, ϑ - угол тангажа носителя, ψ - угол курса носителя.
Вектор поворота П и матрицы поворотов Мх, My, Mz определяют однозначную связь антенной системы координат и земной, связанной с носителем, системой координат ОнХнYнZн. Матрицы обратных поворотов Мхо, Myo, Mzo совместно с приведенными ниже вектором обратного поворота По и вектором угловой скорости линии визирования Пω, определяют однозначную обратную связь между упомянутыми системами координат.
Третий вычислитель 12 затем считывает из ЗУ 18 значения угловых скоростей вращения платформы ωпх(k-1), ωпу(k-1), ωпz(k-1), ωпг(k-1), ωпв(k-1), используя которые для текущего k-го такта измерений вычисляет оцененные значения угловых скоростей вращения платформы вокруг осей
 ,
,  ,
,
 системы координат ОнХнYнZн:
системы координат ОнХнYнZн:



по которым вычисляет оцененные значения угловых скоростей вращения платформы в горизонтальной  и вертикальной
и вертикальной  плоскостях:
плоскостях:


оцененные значения угловых скоростей  ,
,  ,
,  ,
,  и
и  третий вычислитель 12 записывает в ЗУ 18 для использования их в следующем k-ом такте измерений в виде значений, соответственно, ωпх(k-1), ωпу(k-1), ωпz(k-1), ωпг(k-1) и ωпв(k-1).
третий вычислитель 12 записывает в ЗУ 18 для использования их в следующем k-ом такте измерений в виде значений, соответственно, ωпх(k-1), ωпу(k-1), ωпz(k-1), ωпг(k-1) и ωпв(k-1).
С первого выхода третьего вычислителя 12 матрицы поворотов Мх, MУ, Mz поступают на второй вход четвертого вычислителя 16. С второго выхода третьего вычислителя 12 матрицы обратных поворотов Мxo, Myo, Mzo поступают на второй вход восьмого вычислителя 21. С третьего выхода третьего вычислителя 12 оцененные значения угловых скоростей вращения платформы в горизонтальной  и вертикальной
и вертикальной  плоскостях поступают на четвертый вход десятого вычислителя 23.
плоскостях поступают на четвертый вход десятого вычислителя 23.
Четвертый вычислитель 16 по формуле
вычисляет координаты РКО в системе координат ОнХнYнZн, где Хркон, Yркон, Zркон - значения координат РКО соответственно по осям Хн, Yн и Zн. Значения координат Хркон, Yркон, Zркон РКО с выхода четвертого вычислителя 16 поступают на вход пятого вычислителя 17, который по формулам
ϕркогн(k)=arctg(yркон/хркон);
ϕрковн(k)=arcsin(zркон)
вычисляет значение пеленгов РКО в горизонтальной ϕрког вертикальной ϕрков плоскостях в системе координат ОнХнУнZн, которые с выхода пятого вычислителя 17 поступают на вход шестого вычислителя 19.
Шестой вычислитель 19 считывает из ЗУ 18 оцененные значения пеленгов РКО в горизонтальной  и вертикальной
и вертикальной  плоскостях и угловых скоростей линии визирования РКО
плоскостях и угловых скоростей линии визирования РКО  ,
,  в этих жеплоскостях, экстраполированные значения пеленгов РКО в горизонтальной ϕркогн(k) и вертикальной ϕрковн(k) плоскостях, значения констант αг, βг, αв, βв, значение временного интервала Δt, используя которые, он для текущего k-го такта измерений вычисляет оцененные значения пеленгов РКО в горизонтальной
в этих жеплоскостях, экстраполированные значения пеленгов РКО в горизонтальной ϕркогн(k) и вертикальной ϕрковн(k) плоскостях, значения констант αг, βг, αв, βв, значение временного интервала Δt, используя которые, он для текущего k-го такта измерений вычисляет оцененные значения пеленгов РКО в горизонтальной  и вертикальной
и вертикальной  плоскостях, оцененные значения угловых скоростей линии визирования РКО в горизонтальной
плоскостях, оцененные значения угловых скоростей линии визирования РКО в горизонтальной  и вертикальной
и вертикальной  плоскостях и экстраполированные на следующий (k+1)-й такт измерений значения пеленгов РКО в горизонтальной ϕркогнэ(k+1) и вертикальной ϕрковнэ(k+1) плоскостях по формулам:
плоскостях и экстраполированные на следующий (k+1)-й такт измерений значения пеленгов РКО в горизонтальной ϕркогнэ(k+1) и вертикальной ϕрковнэ(k+1) плоскостях по формулам:






Затем шестой вычислитель 19 записывает в ЗУ 18 экстраполированные значения пеленгов ϕркогнэ, ϕрковнэ РКО и оцененные значения и угловых скоростей  ,
,  линии визирования РКО, который их запоминает до следующего такта измерений.
линии визирования РКО, который их запоминает до следующего такта измерений.
С первого выхода шестого вычислителя 19 оцененные значения пеленгов  ,
,  РКО, экстраполированные значения пеленгов ϕркогнэ, ϕрковнэ РКО и угловых скоростей линии визирования , РКО поступают потребителям информации.
РКО, экстраполированные значения пеленгов ϕркогнэ, ϕрковнэ РКО и угловых скоростей линии визирования , РКО поступают потребителям информации.
С второго выхода шестого вычислителя 19 оцененные значения пеленгов , РКО и угловых скоростей линии визирования , РКОпоступают на вход седьмого вычислителя 20, который по формулам
формирует вектор обратного поворота Пo и вектор угловой скорости линии визирования Пω, которые с выхода седьмого вычислителя 20 поступают на вход восьмого вычислителя 21.
Восьмой вычислитель 21 по формулам
вычисляет положение РКО в системе координат OнXнYнZн, где Хркоп Yркоп Zркоп - значения координат РКО соответственно по осям Хп, Yп и Zп, и составляющие ωхркоп, ωуркоп, ωzркоп угловой скорости линии визирования РКО в этой системе координат.
Вычисленные значения координат РКО Хркоп, Yркоп, Zркоп и составляющие ωхркоп, ωуркоп, ωркоп угловой скорости линии визирования РКО с выхода восьмого вычислителя 21 поступают на первый вход девятого вычислителя 22, который по формулам



вычисляет оцененные значения пеленгов  и
и  РКО соответственно в плоскости XпZп и вертикальной плоскости системы координат OнXнYнZн, а также оцененные значения угловых скоростей
РКО соответственно в плоскости XпZп и вертикальной плоскости системы координат OнXнYнZн, а также оцененные значения угловых скоростей  и
и  линии визирования РКО в упомянутых плоскостях. Оцененные значения пеленгов и РКО и угловых скоростей и линии визирования РКО с выхода девятого вычислителя 22 поступают на третий вход десятого вычислителя 23.
линии визирования РКО в упомянутых плоскостях. Оцененные значения пеленгов и РКО и угловых скоростей и линии визирования РКО с выхода девятого вычислителя 22 поступают на третий вход десятого вычислителя 23.
Десятый вычислитель 23 из ЗУ 18 считывает значения констант кг1, кг2, кг3, кв1, кв2, кв3, используя которые, по формулам


вычисляет значения управляющих сигналов δxz и δy(xz) для приводов антенны соответственно в горизонтальной и вертикальной плоскости системы координат OпXпYпZп.
С первого выгода десятого вычислителя 23 управляющий сигнал δxz поступает на вход привода антенны в горизонтальной плоскости 1. С второго выгода десятого вычислителя 23 управляющий сигнал δy(XZ) поступает на вход привода антенны в вертикальной плоскости 13. Приводы антенны в соответствии с этими управляющими сигналами осуществляют поворот антенны в направлении РКО на данном такте измерений.
После этого описанный выше процесс сопровождения РКО повторяют.
Заявленное устройство обладает, по сравнению с прототипом, более высокой точностью и устойчивостью сопровождения любых современных высокоманевренных РКО в условиях маневрирования как сопровождаемого РКО, так и носителя угломера.
Высокая точность сопровождения объясняется тем, что оцененные значения пеленгов РКО формируются не в антенной, а в связанной с носителем системе координат. Это обеспечивает фильтрацию ошибок измерений положения носителя и платформы, на которой установлена антенна, что обеспечит, в конечном счете, лучшую стабилизацию антенны в пространстве.
Высокая устойчивость сопровождения маневрирующих РКО обеспечивается использованием сигнала управления антенной, в которых учитываются ошибки сопровождения по углу, а также угловые скорости вращения как платформы, так и носителя.
Использование изобретения позволит реализовать устойчивое сопровождение любых современных РКО по направлению и обеспечить формирование оценок их пеленгов и скоростей их изменения с высокой точностью в любых условиях применения.
Реализация заявленного устройства не предъявляет дополнительных требований к используемым датчикам, антенне, приемнику, а также к принципам построения вычислителей, их быстродействию и объему памяти их ЗУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ | 2003 |
|
RU2249232C2 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТИ И УГЛОВЫХ КООРДИНАТ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2251711C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2006 |
|
RU2313054C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2021 |
|
RU2773672C1 |
| АКТИВНАЯ РАДИОЛОКАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ РАКЕТЫ | 2008 |
|
RU2360204C1 |
| Способ нелинейного управления инерционным приводом антенны, обеспечивающий высокую устойчивость сопровождения интенсивно маневрирующих объектов | 2017 |
|
RU2661346C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА В РАДИОЛОКАЦИОННОЙ СИСТЕМЕ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2003 |
|
RU2237909C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2021 |
|
RU2776155C1 |
| Способ и устройство противодействия беспилотным летательным аппаратам | 2023 |
|
RU2818398C1 |
Моноимпульсное радиолокационное устройство сопровождения по направлению, содержащее антенну, датчики углового положения антенны, приемное устройство и вычислители, в которых реализованы задачи пересчета систем координат, фильтрации и формирования управляющих сигналов для управления антенной. Достигаемым техническим результатом является высокая точность и устойчивость сопровождения любых современных высокоманевренных РКО в условиях маневрирования как сопровождаемого РКО, так и носителя угломера. Высокая точность сопровождения объясняется тем, что оцененные значения пеленгов РКО формируются не в антенной, а в связанной с носителем системе координат. Это обеспечивает фильтрацию ошибок измерений положения носителя и платформы, на которой установлена антенна, что обеспечит, в конечном счете, лучшую стабилизацию антенны в пространстве. Высокая устойчивость сопровождения маневрирующих РКО обеспечивается использованием сигнала управления антенной, в которых учитываются ошибки сопровождения по углу, а также угловые скорости вращения как платформы, так и носителя. Использование изобретения позволит реализовать устойчивое сопровождение любых современных РКО по направлению и обеспечить формирование оценок их пеленгов и скоростей их изменения с высокой точностью в любых условиях применения. 2 ил.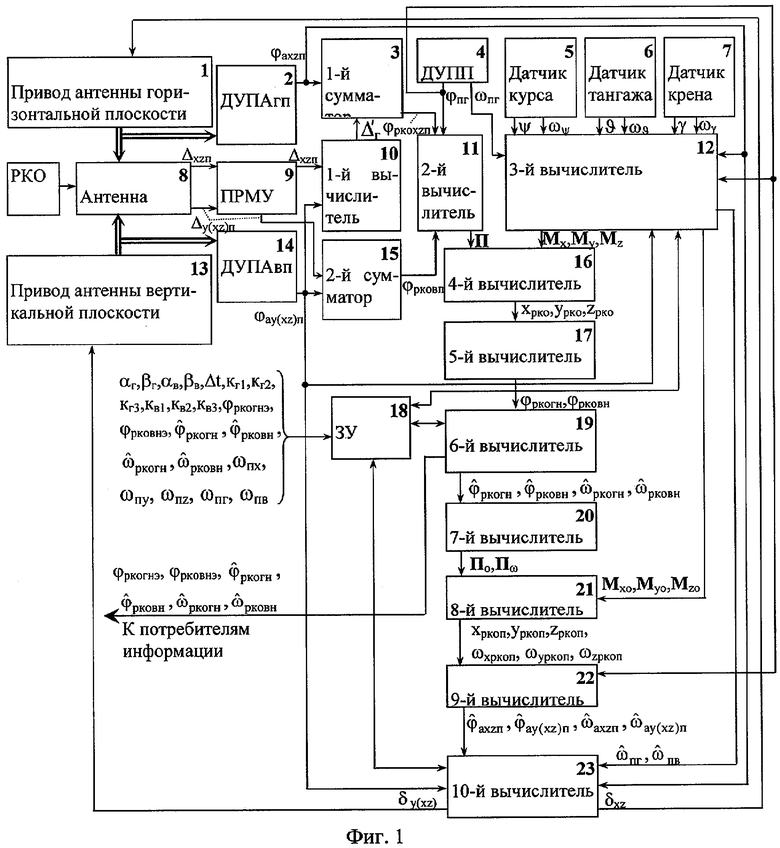
Моноимпульсное радиолокационное устройство сопровождения по направлению, содержащее антенну, механически соединенную с приводом антенны в горизонтальной плоскости и приводом антенны в вертикальной плоскости, на которых закреплены два датчика углового положения антенны (ДУПА) - один для измерения угла отклонения антенны от строительной оси платформы, на которой закреплена антенна, в горизонтальной плоскости (ДУПАгп), другой - для измерения угла отклонения антенны в вертикальной плоскости (ДУПАвп), приемное устройство (ПРМУ), первый вход которого соединен с первым выходом антенны, на котором формируют сигнал ошибки пеленгации в горизонтальной плоскости, а второй вход ПРМУ соединен с вторым выходом антенны, на котором формируют сигнал ошибки пеленгации в вертикальной плоскости, отличающееся тем, что дополнительно введены первый вычислитель, первый вход которого соединен с первым выходом ПРМУ (на этом выходе ПРМУ формируется усиленный и отфильтрованный от шумов сигнал ошибки пеленгации в горизонтальной плоскости), а второй вход первого вычислителя соединен с выходом ДУПАвп, первый сумматор, первый вход которого соединен с выходом ДУПАгп, а второй вход - с выходом первого вычислителя, второй сумматор, первый вход которого соединен с вторым выходом ПРМУ (на этом выходе ПРМУ формируется сигнал ошибки пеленгации в вертикальной плоскости), а второй вход - с выходом ДУПАвп, второй вычислитель, первый вход которого соединен с выходом первого сумматора, второй вход - с выходом второго сумматора, третий вход - с первым выходом введенного датчика углового положения платформы (ДУПП), на которой установлена антенна, третий вычислитель, первый вход которого соединен с выходом ДУПАгп, второй вход - с выходом ДУПАвп, третий вход - с первым выходом ДУПП, четвертый вход - с вторым выходом ДУПП, пятый и шестой входы - соответственно с первым и вторым выходами введенного датчика курса, седьмой и восьмой входы - соответственно с первым и вторым выходами введенного датчика тангажа, девятый и десятый входы - соответственно с первым и вторым выходами введенного датчика крена, четвертый вычислитель, первый и второй входы которого соединены соответственно с выходом второго вычислителя и первым выходом третьего вычислителя, пятый вычислитель, вход которого соединен с выходом четвертого вычислителя, шестой вычислитель, вход которого соединен с выходом пятого вычислителя, а первый выход - с потребителями информации, седьмой вычислитель, вход которого соединен с вторым выходом шестого вычислителя, восьмой вычислитель, первый вход которого соединен с выходом седьмого вычислителя, а второй вход - с вторым выходом третьего вычислителя, девятый вычислитель, первый вход которого соединен с выходом восьмого вычислителя, а второй вход - с первым выходом ДУПП, десятый вычислитель, первый вход которого соединен с выходом ДУПАгп, второй вход - с выходом ДУПАвп, третий - с выходом девятого вычислителя, четвертый вход - с третьим выходом третьего вычислителя, первый выход - с входом привода антенны в горизонтальной плоскости, второй выход - с входом привода антенны в вертикальной плоскости, запоминающее устройство соединено с третьим, шестым и десятым вычислителями по линиям приемопередачи данных и управления, ЗУ также имеет вход для записи данных от внешнего источника.
| US 5014064 А, 07.05.1991 | |||
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| Справочник по радиолокации / Под ред | |||
| М.Сколника, - М: Сов | |||
| радио, 1978, т.4, с.20, рис.15 | |||
| US 4533916, 06.08.1985 | |||
| ЦИФРОВОЙ ФАЗОМЕТР ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ СДВИГА ФАЗ | 0 |
|
SU381038A1 |

