ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области и средствам обнаружения, распознавания и борьбы с беспилотными летательными аппаратами (БЛА). Способ и устройство могут быть использованы для обнаружения радиоизлучающей воздушной цели (БЛА - нарушителя), подъема и вывода БЛА-перехватчика в автоматическом дистанционно-пилотируемом режиме, используя вычисленное направление на цель, в зону обнаружения БЛА-нарушителя бортовой видеокамерой и затем дальнейшего продолжения полета на цель в режиме наведения по данным видеокамеры до ее кинетического поражения.
Технический результат изобретения заключается в обеспечении возможности использования для противодействия БЛА как специализированных для этой цели БЛА-перехватчиков, так и бытовых или спортивных, без изменения их конструкции и функциональных возможностей.
Технический результат изобретения по данному способу заключается также в том, что минимизируются квалификационные требования к оператору (пилоту БЛА), так как в устройстве противодействия БЛА реализуется автоматическое управление полетом по рассчитанным данным без непосредственного участия оператора. Роль оператора заключается только в принятии решений об обнаружении цели, о запуске БЛА-перехватчика по направлению вычисленного пеленга, в визуальном сопровождении по принимаемому видеосигналу и кинетическом поражении или захвата сеткой после сближения.
Технический результат при реализации устройства противодействия БЛА по предлагаемому способу достигается конструктивным исполнением устройства в виде пульта управления дистанционно пилотируемых летательных аппаратов и включением в состав средств дистанционного управления полетом, двунаправленного канала радиосвязи, обеспечивающего передачу команд управления полетом и прием данных телеметрии и видеосигнала, блока обработки радиосигналов, видеоданных и телеметрии, средств спутниковой навигации, сенсорного монитора, пеленгационных антенн, средств звуковой идентификации радиоизлучений и др. с изменением их взаимодействия, а также конструктивным объединением перечисленных элементов, узлов, блоков и средств в одном компактном устройстве.
УРОВЕНЬ ТЕХНИКИ И АНАЛОГИ
Для управления полетом БЛА широко используются компактные малогабаритные пульты управления [Phantom 4 Инструкция по эксплуатации, 2016.03, стр. 8] и специализированные очки [DJI FPV Руководство пользователя, v1.0, 2012.03, стр. 8-11], обеспечивающие прием видеоинформации с камеры БЛА. Это так называемое управление от первого лица (First Person View). В данном случае осуществляется не только управление БЛА по радиоканалу системы радиоуправления, но и прием с него видео изображения по дополнительному радиоканалу в режиме реального времени. Пилот, управляющий БЛА, видит изображение, получаемое с видеокамеры при помощи устройств отображения: мониторов, телевизоров, видео-очков, видео-шлемов.
Для эффективного кинетического поражения цели (мини-БЛА массой до 30 кг), например, широко распространенными БЛА фирмы DJI, в их полетном контроллере должен быть отключен режим самовыравнивания (angle или horizon), т.е. должен использоваться режим Rate (скоростной) или manual (ручной). В литературе часто используется другое название этого режима - acro. Однако, управление полетом от «первого лица» First Person View (FPV) в режиме acro может быть очень трудной задачей для неподготовленного персонала (пилота или оператора).
Известны комплексы борьбы с БЛА (патенты RU 2 769 037, RU 2 755 603, RU 2 700 107, RU 2490585, US 8 375 837 B2 и др.) включающие в свой состав цифровые фазированные антенные решетки, импульсно-доплеровские многолучевые трехкоординатные радиолокаторы и другие активные системы. Недостатком является использование наземных активных средств обнаружения и наведения. Использование активных средств обзора пространства (радары, лидары) является как основным демаскирующим фактором, снижающим скрытность, а, следовательно, и живучесть, так и фактором, влияющим на высокую стоимость и некоторые ограничения по мобильности.
Известны системы обнаружения, распознавания и борьбы с БЛА-нарушителями (патенты RU 149 412, RU 2 565 860, RU 2189625, RU 144 029, DE 10 2016 219 457 A1 и др.), обеспечивающие вывод БЛА в заданную точку пространства. Однако данные системы, кроме наземного сегмента, содержат аппаратуру в составе: модифицированный автопилот, вычислительную машину с элементами искусственного интеллекта, камеру кругового обзора, радиолокатор и др., размещаемую на борту БЛА-перехватчика. Одноразовое использование этих средств для поражения мини-ББЛА весьма затратно и представляется экономически неоправданным.
Известны комплексы борьбы с БПЛА (патенты RU 2 718 560, RU 2 769 037, RU 2 700 107, US 7 123 169 B2 и др.), использующие как пассивные, так и активные наземные радиолокационные средства для определения координат и скорости воздушных целей (ВЦ). Недостатком являются большие размеры, стоимость, сложность эксплуатации, невозможность оснастить каждое подразделение типа взвод и т.п.
Общим недостатком выше указанных способов и устройств является то, что возможность проведения повторной атаки не предусмотрена.
Близким к заявляемому способу перехвата воздушных целей в части возможности повторной атаки является способ и устройство по патенту RU 2 685 597 «Способ перехвата летательных аппаратов самонаводящейся электроракетой». Недостатком данного способа является то, что расчет траектории полета и вывода в зону видимости цели производится на борту перехватчика и это не позволяет использования бытовых или спортивных БЛА без изменения их конструкции и функциональных возможностей.
Наиболее близким к предлагаемому способу и устройству обнаружения и наведения является способ по патенту RU 2 743 401 «Способ противодействия беспилотным летательным аппаратам» выбранный в качестве прототипа. Важным достоинством по пункту 9 формулы данного патента возможность использовать радиосвязь для передачи видеосигнала в систему обработки данных, расположенную на земле, что могло бы позволить снизить стоимость производства БЛА-перехватчика и упростить его конструкцию. Однако, полет БЛА-перехватчика до визуального контакта с целью предполагается по ориентировочным координатам БЛА-нарушителя, в режиме самонаведения: «БЛА-перехватчик представляет собой беспилотные летательные аппараты мультироторного типа (квадрокоптер, октокоптер и т.п.), оборудованные вычислителем и датчиками навигации (GPS, ГЛОНАСС, инерционные), обеспечивающими выполнение автоматического взлета и полета, системой самонаведения и системы управления, выполненной в виде компьютерного устройства с установленным программным обеспечением». Это предполагает использование по данному способу специализированных БЛА с предустановленным программным обеспечением и соответствующим бортовым вычислителем.
К недостаткам данного способа следует отнести также необходимость первоначальной оценки координат цели с помощью наземного обнаружителя - «автоматическом обнаружении БЛА-нарушителя системой обнаружения» и передачи ему «ориентировочных координат местонахождения БЛА-нарушителя, его курса и скорости движения». Исходя из современного уровня техники, устройством, способным к определению координат, курса и скорости движения воздушной цели, может быть либо активное средство типа РЛС, либо многопостовое средство пассивной координатометрии. Использование радаров или лидаров, как отмечено выше, является демаскирующим фактором, а использование многопостовых пассивных средств координатометрии кроме громоздкости и проблем с возможным размещением приводит к необходимости организации радиосвязи между постами, которая в режиме дежурного обзора пространства также может быть значимым демаскирующим фактором.
РАСКРЫТИЕ СУЩНОСТИ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Техническим результатом предлагаемого изобретения «Способ и устройство противодействия беспилотным летательным аппаратам» является:
- обеспечении возможности использования для противодействия БЛА как, специализированных для этой цели БЛА-перехватчиков, так и бытовых или спортивных без изменения их конструкции и функциональных возможностей;
- минимизация квалификационных требований к оператору (пилоту БЛА), так как в устройстве противодействия БЛА реализуется автоматическое управление полетом по рассчитанным данным без непосредственного участия оператора;
- скрытность работы устройства противодействия БЛА в режимах обнаружения и сопровождения БЛА-нарушителя;
- малые габариты и вес устройства, возможность транспортировки и применения одним человеком на неподготовленных площадках (окопах, укрытий, и пр.);
- обеспечение соизмеримости затрат по противодействию беспилотным летательным аппаратам стоимости самих мини-БЛА.
Технический результат предлагаемого изобретения «Способ и устройство противодействия беспилотным летательным аппаратам» достигается тем, что:
- в способе противодействия БЛА не используются автономные системы обнаружения и распознавания радиолокационного типа, при запуске БЛА-перехватчика ему не передаются ориентировочные координаты местонахождения БЛА-нарушителя, его курс и скорость движения. Полет БЛА-перехватчик в режиме самонаведения не используется. Полет БЛА-перехватчика осуществляется под автоматическим управлением устройства противодействия БЛА. Оснащение БЛА-перехватчика системой самонаведения не требуется;
- в устройстве противодействия БЛА реализуется автоматическое управление полетом по рассчитанным данным без непосредственного участия оператора. Роль оператора заключается только в принятии решений об обнаружении цели, о запуске БЛА-перехватчика по направлению вычисленного пеленга, в визуальном сопровождении по принимаемому видеосигналу и кинетическом поражении или захвата сеткой после сближения;
- в способе противодействия БЛА не используются автономные активные средств обнаружения и сопровождения БЛА-нарушителя типа РЛС;
- стоимость используемого для кинетического поражения БЛА-нарушителя простого коммерческого или спортивного БЛА (40 тыс. рублей) по заявляемому способу может быть в 2-3 разе меньше БЛА-нарушителя, оборудованного камерой для видеосъемки (100 тыс. рублей).
Сущность данного изобретения и технический результат при реализации устройства противодействия БЛА по предлагаемому способу заключается и достигается также конструктивным исполнением устройства в виде пульта управления дистанционно пилотируемых летательных аппаратов и включением в состав средств дистанционного управления полетом, двунаправленного канала радиосвязи, обеспечивающего передачу команд управления полетом и прием данных телеметрии и видеосигнала, блока обработки радиосигналов, видеоданных и телеметрии, средств спутниковой навигации, сенсорного монитора, пеленгационных антенн, средств звуковой идентификации радиоизлучений и др. с изменением из взаимодействия, а также конструктивным объединением перечисленных элементов, узлов, блоков и средств в одном компактном устройстве.
Сравнение отличий способа - прототипа и предлагаемого способа приведены в таблице №1.
«корректировка курса БЛА-перехватчика производится таким образом, чтобы произошло пересечение курса БЛА-перехватчика с курсом БЛА-нарушителя с последующим кинетическим уничтожением БЛА-нарушителя» - п. 1-f
Совпадают
ОПИСАНИЕ ЧЕРТЕЖЕЙ
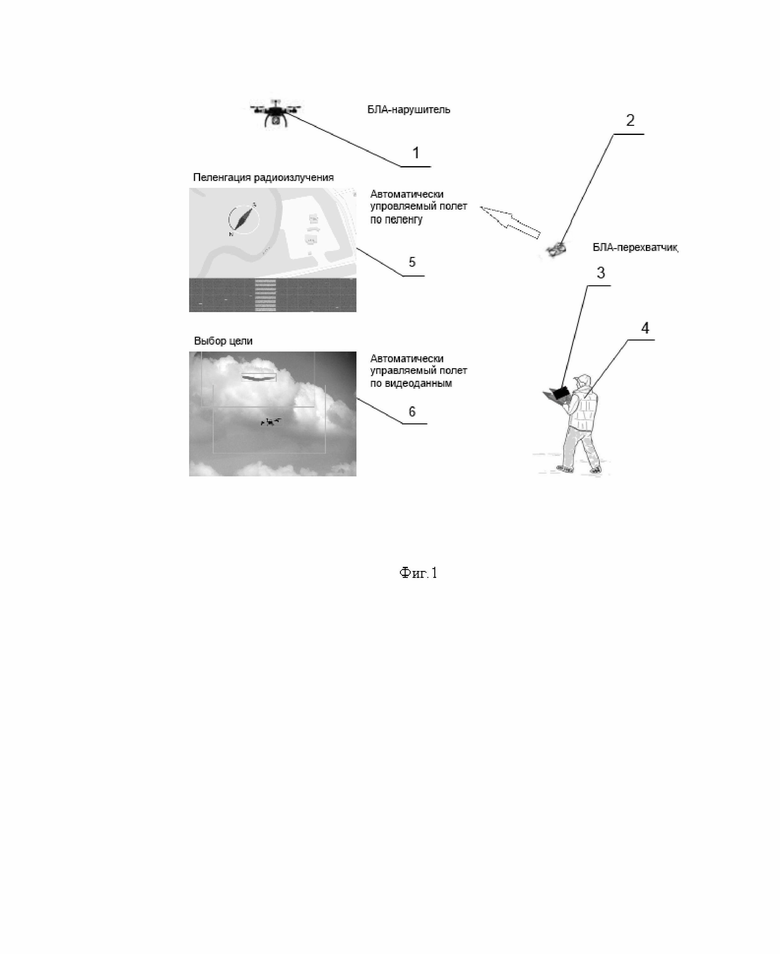
На фиг. 1 изображена схема применения устройства противодействия БЛА, где
1 - источник радиоизлучения - БЛА - нарушитель;
2 - дистанционно-пилотируемый БЛА-перехватчик;
3 - устройство противодействия БЛА;
4 - оператор дистанционно-пилотируемого БЛА-перехватчика;
5 - информация на сенсорном мониторе устройства противодействия БЛА на этапе поиск источника радиоизлучения посредством механического перемещения устройства для обзора пространства;
6 - информация на сенсорном мониторе устройства противодействия БЛА на этапе выбора цели по данным бортовой видеокамеры.
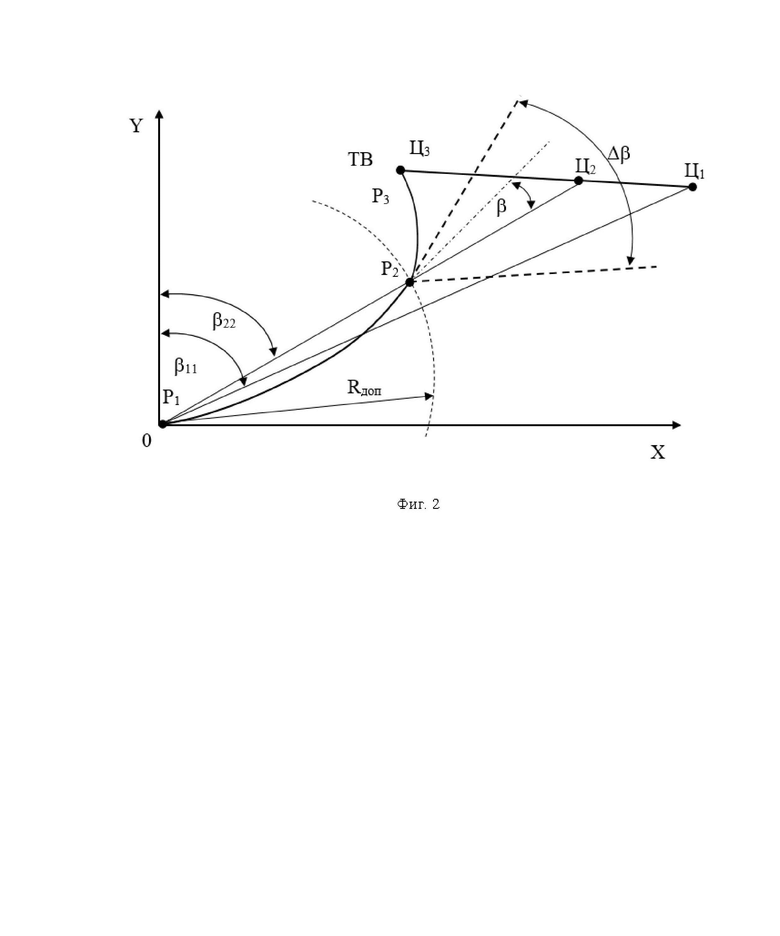
На фиг. 2 приведена геометрическая интерпретация способа обнаружения и поражения БЛА-нарушителя.
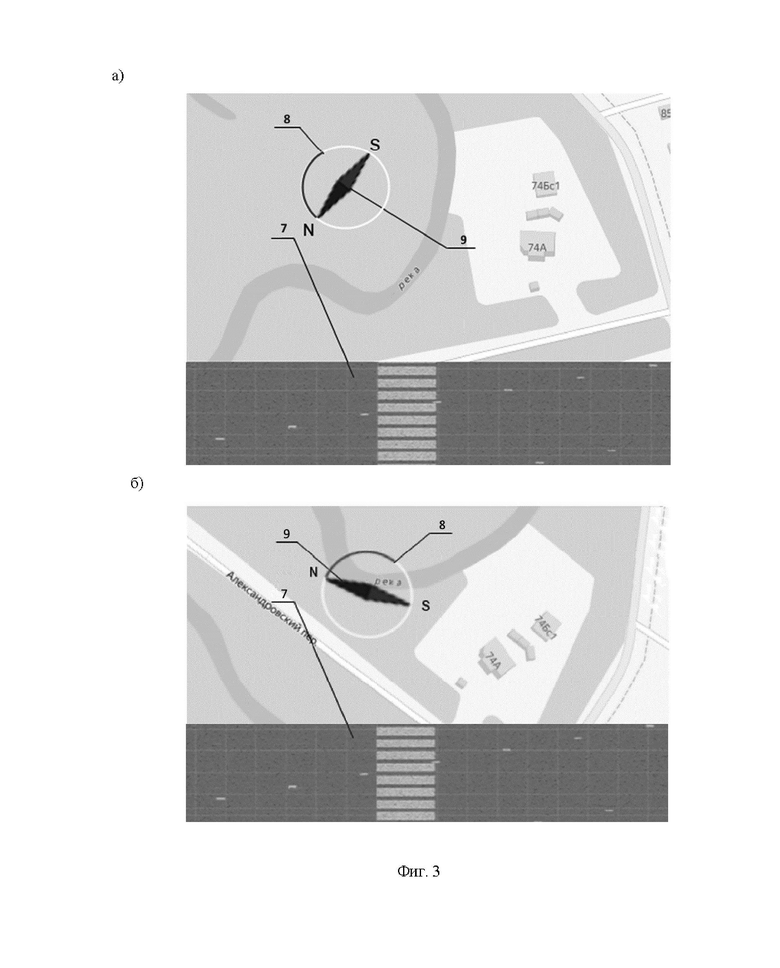
На фиг. 3 приведен возможный вариант отображения информации на видеомониторе устройства противодействия БЛА при выполнении операции поиска цели, где
7 - спектрограмма принимаемого сигнала;
8 - направление на источник радиоизлучения (ИРИ);
9 - индикатор компаса устройства противодействия БЛА.
На фиг. 4 приведены варианты реализации устройство противодействия БЛА, где
10 - антенны радиопеленгатора;
11 - антенна двунаправленного канала радиосвязи с БЛА-перехватчиком;
12 - органы ручного управления дистанционного пилотирования (стики, кнопки, переключатели и пр.).;
13 - сенсорный монитор (видеомонитор);
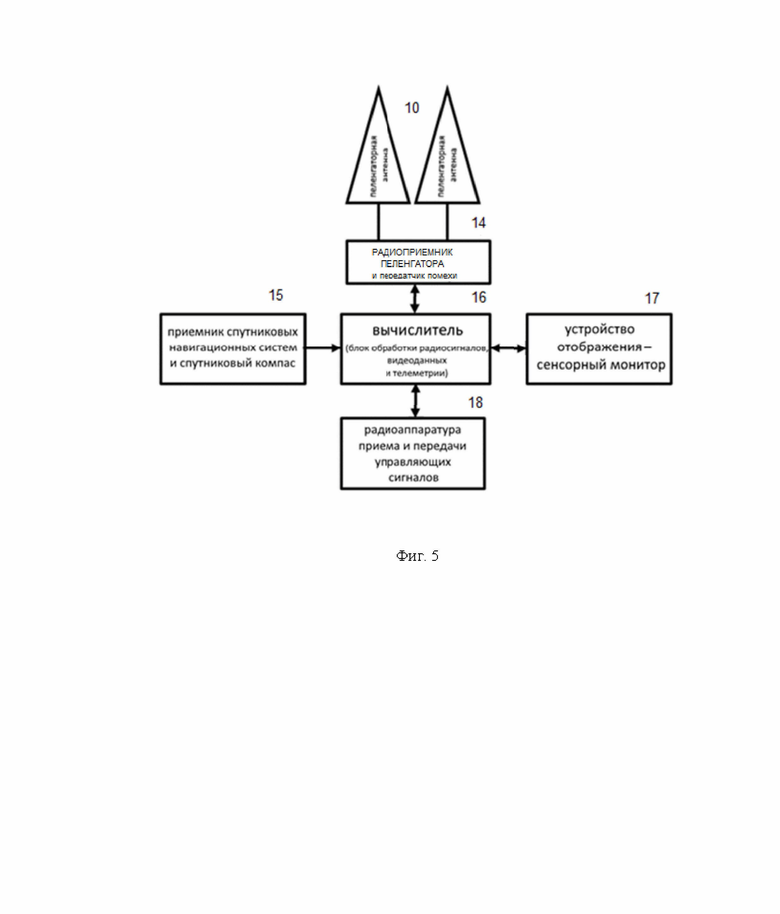
На фиг. 5 представлены основные структурные элементы и блоки устройства, где
14 - радиоприемник пеленгатора и передатчик помехи;
15 - приемник спутниковых навигационных систем и спутниковый компас;
16 - вычислитель (блок обработки радиосигналов, видеоданных и телеметрии);
17 - устройство отображение - сенсорный монитор;
18 - радиоаппаратура приема и передачи управляющих сигналов
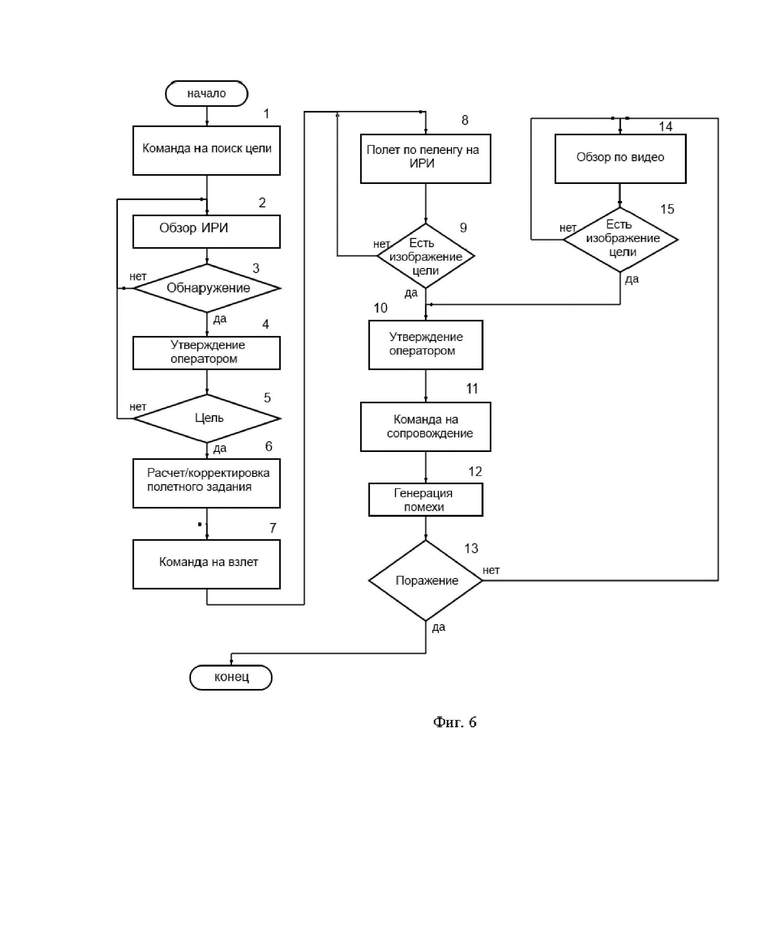
На фиг. 6 приведен алгоритм работы с устройством противодействия БЛА по данному способу.
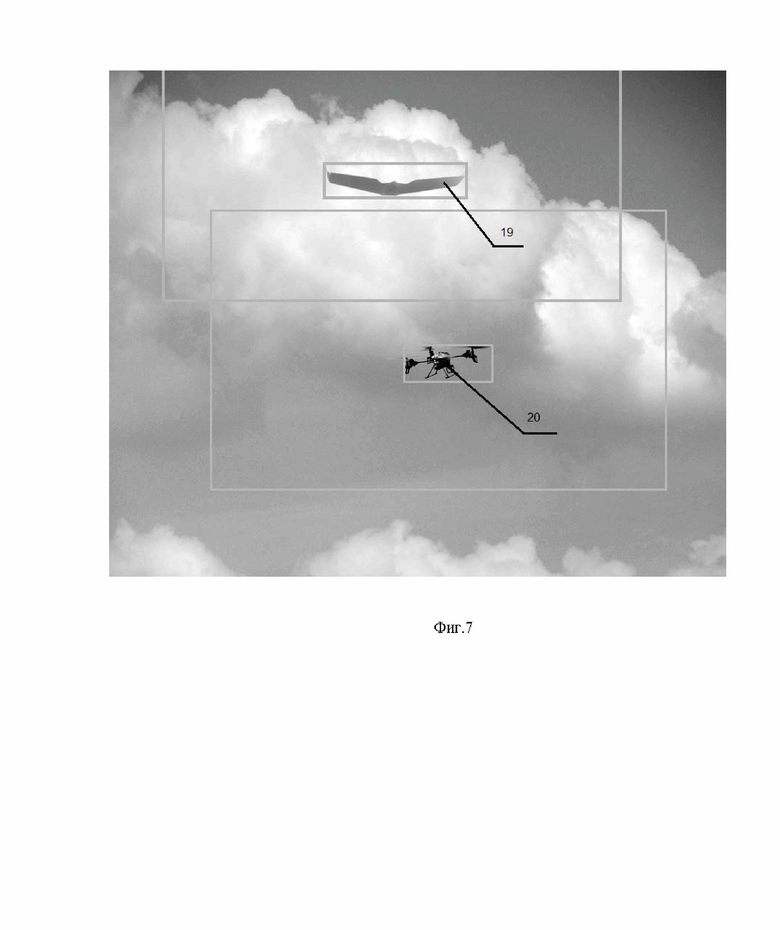
На фиг. 7 приведен возможный вариант представления на сенсорном мониторе обнаруженных БЛА, по которым оператор должен сделать выбор цели для поражения, где
19 - первая возможная цель;
20 - вторая возможная цель.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Предлагаемое решение по заявляемому способу позволит непосредственно оператору осуществить поиск цели 1 посредством механического перемещения устройства для обзора пространства - устройства противодействия БЛА 3 (фиг. 1, фиг. 4).
Обнаружение цели идентифицируется оператором путем интерпретации информации о радиоэфире 5, 6, получаемой с экрана сенсорного монитора 13 устройства противодействия БЛА и его аудиовыхода (фиг.3, фиг.4).
Звуковая идентификация может быть реализована через программную реализацию в вычислителе (блоке обработки радиосигналов, видеоданных и телеметрии) 16 устройства противодействия БЛА алгоритма амплитудного детектирования [Сифоров В.И. Радиоприемные устройства. Под общей редакцией В.И. Сифорова. Авторы: Амиантов И.Н., Антонов-Антипов Ю.Н., Васильев В.П., Данилов Б.В., Лебедев В.Л., Сифоров В.И., Судаков С.С., Щуцкой К.А., Москва: Издательство «Советское радио». Редакция радиотехнической литературы, 1974]. При этом будет происходить трансформация частотного спектра принимаемого сигнала, а именно перенос высокочастотных колебаний в область низких (звуковых) частот. Низкочастотные колебания транслируемые на аудиовыход устройства, позволят оператору оценивать радиоэфир на слух.
Наведение БЛА-перехватчика на цель 1 производится следующим образом. На участке Р1Р2 (фиг. 2) БЛА-перехватчик наводится по методу трех точек, а в момент обнаружения цели видеокамерой изображение объекта транслируется оператору для принятия решения о переходе на сопровождение по данным бортовой видеокамеры и при утверждении оператором результатов обнаружения осуществляется переход на метод наведения - пропорциональная навигация.
При обнаружении источника радиоизлучения (ИРИ), классифицируемого оператором по принадлежности к БЛА, осуществляется запуск БЛА-перехватчика 2 в направлении β11 (фиг.2) и формирование команд управления по методу трех точек (методу совмещения, методу накрытия цели) - БЛА-перехватчик находится на линии визирования цели, при этом параметр рассогласования равен:
где: 
При этом угол азимута 
Угол азимута 




Исходя из геометрии рисунка на фиг. 2 следует:

По угломестному каналу наведение может не осуществляется, поскольку видеокамера имеет обзор по горизонтали 135 град. и 110 град. по вертикали. БЛА-перехватчик летит на постоянной высоте, обеспечивающей исключение столкновений с местными предметами. Такой подход оправдан, поскольку высота полета типовых БЛА-нарушителей незначительна.
Параметр рассогласования при методе пропорциональной навигации определяется как
где 
К - коэффициент пропорциональной навигации.
Поскольку дальность до БЛА - нарушителя 1 неизвестна при обнаружении его пассивным радиопеленгатором 14 (фиг. 5) устройства противодействия БЛА и может быть недостижимой для БЛА-перехватчика 2. Это приведет к их необоснованному перерасходу. При достижении некоторой допустимой дальности RДОП при которой возможен возврат БЛА-перехватчика обратно, он переходит в режим висения в данной точке с целью ожидания появления БЛА-нарушителя. Простейший профиль полета БЛА-перехватчика в этом случае состоит из четырех этапов: набора высоты, горизонтального полета, зависания в заданной точке и снижения. Таким образом, дальность полета L можно определить, как сумму трех величин - расстояний (дальностей), достигнутых при наборе LНAБ, в горизонтальном полете LГП и при снижении LCH: L = Lнаб + Lгп + Lсн. Продолжительность полета можно определить, сложив время набора высоты, горизонтального полета зависания в заданной точке и снижения: t пол = t наб + t гп + t В + t СН, здесь t В - время зависания.
Величина RДОП определяется как:


При обнаружении БЛА-нарушителя 1 (типовые бортовые видеокамеры могут обнаружить цель на расстоянии не более 300 метров) формируется команда на достижение максимальной скорости с целью достижения максимально возможного значения кинетической энергии для поражения цели.
При не обнаружении БЛА-нарушителя формируется команда «ВОЗВРАТ» и аппарат начинает совершать полет в точку старта, при этом формируется команда на старт другого аппарата.
При необходимости оператор устройства противодействия БЛА 4 (фиг. 1) может дать команду на запуск нескольких БЛА-перехватчиков с временным интервалом, обеспечивающим гарантированное присутствие БЛА на дистанции RДОП.
При приеме данных от системы внешнего целеуказания (данные о координатах и параметрах движения БЛА-нарушителя могут передаваться оператору по цифровой радиостанции) о наличии БЛА-нарушителя в зоне досягаемости по дальности требования к RДОП снимаются что увеличивает дальность перехвата.
При достижении БЛА-перехватчиком определенной дистанции до цели 1, в зависимости от погодных условий, типа видеокамеры и типа цели, происходит «видео-захват» цели (блоки 9, 10 фиг. 6), путем детектирования цели на изображении по алгоритму оптимального порогового обнаружителя [Гонсалес Р., Вудс Р. Цифровая обработка изображений Издание 3-е, исправленное и дополненное Москва: Техносфера, 2012, стр. 874]. При этом происходит индикация найденной цели (фиг.7) на экране сенсорного монитора 13 устройства противодействия БЛА, и оператор выбирает цель и принимает решение об атаке.
Затем происходит переход к фазе полета на выбранную цель 19 или 20 (фиг.7) по данным видеокамеры до ее кинетического поражения (блоки 11, 12, 13 фиг. 6) по возможному, но неисключительному, алгоритму трекинга CSRT [Электронный ресурс https://broutonlab.com/blog/opencv-object-tracking Дата обращения: 28 февраля 2023] и выдачи команд сближения на основе получаемой видеоинформации. При этом на экране 13 (Фиг. 4) устройства противодействия БЛА продолжает изображаться цель, отслеживаемая маркером 19 или 20 (фиг. 7), формируемым блок обработки радиосигналов, видеоданных и телеметрии 16 (фиг. 5), вектор движения цели и собственного аппарата. При срыве сопровождения происходит допоиск цели 1 и ее повторное детектирование. Выдача команд по сопровождению цели 1 происходят до момента поражения и могут быть прерваны либо командой оператора 4, либо окончанием энергии и запуском второго аппарата.
Возможные, но не исключительные характеристики БЛА-перехватчика: камера имеющая угол обзора: 150° с разрешением 4K: 3840×2160 при 50/60 кадрах в секунду и/или FHD: 1920×1080 при 50/60/100/120 кадрах в секунду. Взлетная масса около 795 г., размеры (с пропеллерами) 255×312×127 мм, размер по диагонали 245 мм, максимальная скорость 140 км/ч (39 м/с), максимальное время полета до 20 минут (при полете со скоростью 40 км/ч в безветренную погоду), максимальное время остановки в воздухе около 16 минут (при полете в безветренную погоду), максимальное расстояние полета 16,8 км (при полете в безветренную погоду).
При необходимости можно осуществить запуск нескольких БЛА - перехватчиков, которые образуют либо роевую, либо структурированную формацию, что повышает вероятность поражения цели, но приводит и к повышению расхода БЛА-перехватчиков.
При необходимости в случае не поражения цели 1 (фиг. 1) можно осуществлять несколько повторных атак БЛА-перехватчиков.
Используемые радиопеленгационные антенны 10 (фиг. 4) могут представлять собой широкополосные логопериодические, рамочные или рупорные антенны, имеющие соответствующие диаграммы направленности для обеспечения пеленгации в азимутальной и угломестной плоскостях. Конструктивно антенны выполняются в защитном корпусе и закрепляются на устройстве с помощью кронштейнов и ВЧ разъемов. Внутри защитного корпуса может быть размещена электронная схема, служащая для усиления или ослабления принимаемого сигнала, а также стандартная батарея, обеспечивающая питание встроенного широкополосного усилителя.
Направление на источник при использовании одноканального пеленгатора может быть вычислено по методу линейного сканированию с последовательным через определенные пространственные промежутки сравнением принимаемых уровней сигнала, т.е. направление на источник определяется путем сравнения сигналов, последовательно принимаемых антенной при круговом или секторальном перемещении пеленгатора оператором устройство противодействия БЛА. Для двух канальных пеленгаторов, показанных на фиг. 4, может быть реализован моноимпульсный амплитудный, фазовый или амплитудно-фазовый метод пеленгации [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М: Сов. Радио, 1970.- 392 с., стр. 5-9 ]. На фиг. 3- а показана информация, отображаемая на экране устройства, когда линия визирования (равносигнального положения) направлена правее направления на источник радиоизлучения, на фиг. 3 - б - когда линия визирования направлена левея направления на источник. Использование моноимпульсного радиопеленгационного устройства позволит не производить оператору непрерывное сканирование пространства, а только корректировать (совмещать) линию визирования с определяемым пеленгом на ИРИ.
Возможность постановки прицельной по частоте и типу модуляции радиопомехи для дезорганизации работы БЛА-нарушителя может быть реализована, т.к. в подавляющем большинстве мини-БЛА каналы управления и сброса видеоданных разнесены по частоте, а подавление радиоприемных устройств БЛА-нарушителя по данному способу осуществляется на этапе наведения по данным получаемым с радиопередающего устройства сброса видеоинформации БЛА-перехватчика, и помеха соответственно генерируется в другом частотном диапазоне во временных промежутках передачи управляющих воздействий БЛА-перехватчику.
Работа с устройством противодействия БЛА по этому способу осуществляется следующим образом (фиг. 6).
Оператор по предварительному целеуказанию или без него осуществляет поиск радиоизлучающей цели посредством механического (ручного) перемещения устройства в предполагаемом пространственном секторе (фиг. 1). В крайнем случае, это может быть 360°. Эту процедуру можно сравнить со спортивной радиопеленгацией, также известной как охота на лис (блоки 1, 2, 3 на фиг. 6). При наведении устройства на источник радиоизлучения на экране сенсорного мониторе устройства (фиг. 4) отражается пеленг на ИРИ - направление относительно направления на Север 9 (фиг. 3), а через динамики выводится перенесенный в звуковой диапазон принимаемый сигнал.
Одновременно оператор производит идентификацию сигнала по графической информации - спектрограмме принимаемых радиоизлучений (фиг. 3).
После идентификации цели как БЛА-нарушитель (блоки 4, 5 фиг. 6) в вычислителе (блоке обработки радиосигналов, видеоданных и телеметрии) (блок 4 фиг. 5) по команде оператора (блок 6 фиг.6) производится взлет БЛА-перехватчика и автоматически управляемый полет по направлению на источник радиоизлучения (блоки 7, 8, 9 фиг.6). Сенсорный монитор устройства (блок 5 фиг. 5) переключается на отображение данных бортовой видеокамеры БЛА-перехватчика (фиг. 7).
При достижении БЛА-перехватчиком зоны видеоконтакта (в зависимости от типа видеосистемы и типа цели, погодных условий расстояние до момента обнаружения может быть разным) и автоматическим обнаружении описанным выше алгоритмом детектирорвания видеоизображений [Гонсалес Р., Вудс Р. Цифровая обработка изображений Издание 3-е, исправленное и дополненное Москва: Техносфера, 2012] оператор принимает решение (блоки 10, 11 фиг. 6) о сопровождении и атаке БЛА-нарушителя по данным бортовой видеокамеры. Для подтверждения атаки оператор выбирает один из выделенных контуров возможных целей (фиг. 7).
Опционально, после перехода в режим самонаведения по видеоданным, оператор может переключить пеленгатор на генерацию радиопомехи (блок 12 фиг. 6). При срыве автосопровождения или не поражения цели оператор может принять решение о проведения повторного поиска цели по видеоданным камеры (блоки 13, 14 фиг. 6) после чего БЛА-перхватчик переходит в режим допоиска цели и ее повторное детектирование по данным видеокамеры.
Принятие решение о поражении цели производится по отсутствию радиоизлучения и изображения БЛА-нарушителя во время режима допоиска (блоки 10, 11, 12, 13, 14, 15 фиг. 6).
При детектировании цели по видеоданным оператор может принять решение об отмене атаки, если цель не является недружественной, и возвращении БЛА-перехватчика на точку старта.
Предлагаемый способ может быть реализован устройством (фиг. 4, фиг.5). Устройство противодействия беспилотным летательным аппаратам состоит из пеленгационных антенн 10, радиоприемника пеленгатора 14, вычислителя (блока обработки радиосигналов, видеоданных и телеметрии) 16, приемника спутниковых навигационных систем и спутникового компаса 15, радиоаппаратуры приема и передачи управляющих сигналов 18, устройства отображения - сенсорного монитора 17.
Пеленгационные антенны 10 могут представлять собой покупное изделие типа логопериодических антенн AX-37A фирмы WINRADIO. Радиоприемник пеленгатора 14 может быть реализован на микросхеме AD 9363 фирмы Analog Devices, вычислитель 16 на микросхеме XC7Z010, фирмы Xilinx или может быть использован SDR приемник ADALM PLUTO фирмы Analog Devices. В качестве радиоаппаратуры приема и передачи управляющих сигналов 18 могут быть использованы покупные элементы 433 Mhz 500 mW 3DR radio Dual TTL фирмы 3D Radio. Приемник спутниковых навигационных систем и спутникового компаса 15 может быть реализован на M8N фирмы Ublox. В качестве устройства отображения 17 может быть использован планшет с сенсорным экраном типа А-110-2 фирмы Снабжение.
Радиосигналы бортовых источников радиоизлучения БЛА-перехватчика принимаются пеленгационными антеннами 10 и с их выхода подаются на двухканальное радиоприемное устройство - радиоприемник пеленгатора 15, где производится сканирование эфира по заданному частотному диапазону, аналого-цифровое преобразование, децимация цифровых отчетов сигнала и сформированный цифровой (IQ) сигнал подается на вход вычислителя - блока обработки радиосигналов, видеоданных и телеметрии 16. Рассчитываемые вычислителем 16 пеленги на обнаруживаемые ИРИ и спектрограмма самого сигнала выводятся на устройство отображения 17 для визуального отображения и идентификации радиосигналов. Для звуковой идентификации принимаемый сигнал, перенесенный в звуковой диапазон, выводится через один из каналов цифро-аналогового преобразования микросхемы AD 9363 на вход динамиков или наушников оператора. Команды на взлет БЛА-перехватчика, которые оператор осуществляет с планшета - устройства отображения 17, поступают в вычислитель 16, а с его выхода на вход радиоаппаратуры приема и передачи управляющих сигналов 18 и с использованием соответствующей антенны 11 (фиг. 4) поступают на радио-вход БЛА-перехватчика. Вычислитель 16 с использованием данных, принимаемых с приемника спутниковых навигационных систем и спутникового компаса 15 (фиг. 5), рассчитывает угол рассогласования
Во время полета БЛА-перехватчика по направлению пеленга на цель данные с видеокамеры БЛА-перехватчика принимаются радиоаппаратурой приема и передачи управляющих сигналов 18 (фиг. 5), поступают на вход вычислителя 16 и с использованием планшета отображаются на его сенсорном мониторе 17. При достаточном сближении для обнаружения БЛА-нарушителя по видеоданным с бортовой камеры БЛА-перехватчика программное обеспечение вычислителя - блока обработки радиосигналов, видеоданных и телеметрии 16 осуществляет оконтуривание цели (фиг. 5) и оператор может, посредством нажатия на сенсорном экране 17 на выделенный контур 19 или 20 (фиг.7), дать команду на сближение с целью для ее кинетического поражения.
Дальнейший полет для сближения с БЛА-нарушителем осуществляется устройством по видеоданным поступающим с бортовой камеры БЛА-перехватчика. Прием видеоданных осуществляется радиоаппаратурой приема и передачи управляющих сигналов 18 (фиг. 5). Принимаемые видеоданные поступают для обработки в вычислитель 16 с последующим определением области кадра, соответствующего изображению БЛА-нарушителя, и вычислением координат БЛА-нарушителя по отношению к БЛА-перехватчику. Вычислителем - блоком обработки радиосигналов, видеоданных и телеметрии 16 рассчитываются соответствующие команды, корректирующие направление полета БЛА-перехватчика таким образом, чтобы полет был точно на цель - БЛА-нарушитель, которые посредством радиоаппаратуры приема и передачи управляющих сигналов 18 передаются в эфир.
Во время автоматически управляемого полета по видеоданным, принимаемым с БЛА перехватчика, оператор может включить режим генерации прицельной помехи. При этом одна из пеленгационных антенн 10 подключается к выходу передатчика помех 14. Генерация помехи осуществляется вычислителем 16 через цифроаналоговый преобразователь микросхемы AD 9363 передатчика помехи 14, подключенного к этой антенне 10. Передачу помехи вычислитель 16 осуществляет во временных промежутках между приемом видеоданных и передачей управляющих команд БЛА-перехватчику.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ противодействия беспилотным летательным аппаратам | 2020 |
|
RU2743401C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Беспилотный летательный аппарат-перехватчик | 2020 |
|
RU2741142C2 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| Инфраструктурная система технического зрения обеспечения безопасности движения поездов в области ограниченной видимости | 2020 |
|
RU2752155C1 |
| Система аэромониторинга залежек морских животных | 2015 |
|
RU2609728C1 |
| УНИФИЦИРОВАННЫЙ БОРТОВОЙ МОДУЛЬ АВИАЦИОННОГО НАБЛЮДЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2794287C1 |

Изобретение относится к области и средствам обнаружения, распознавания и борьбы с беспилотными летательными аппаратами (БЛА). Способ и устройство могут быть использованы для обнаружения радиоизлучающей воздушной цели - БЛА - нарушителя, подъема и вывода БЛА-перехватчика в автоматическом дистанционно-пилотируемом режиме, используя вычисленное направление на цель, в зону обнаружения БЛА-нарушителя бортовой видеокамерой и затем дальнейшего продолжения полета на цель в режиме наведения по данным видеокамеры до ее кинетического поражения. Устройство противодействия БЛА выполнено в виде пульта управления дистанционно пилотируемых ЛА, состоит из средств дистанционного управления полетом, двунаправленного канала радиосвязи, блока обработки радиосигналов, видеоданных и телеметрии, средств спутниковой навигации, сенсорного монитора, пеленгационных антенн. Обеспечивается возможность использования для противодействия БЛА как специализированных БЛА-перехватчиков, так и бытовых или спортивных, без изменения их конструкции и функциональных возможностей. Минимизируются квалификационные требования к оператору - пилоту БЛА. 2 н. и 5 з.п. ф-лы, 7 ил.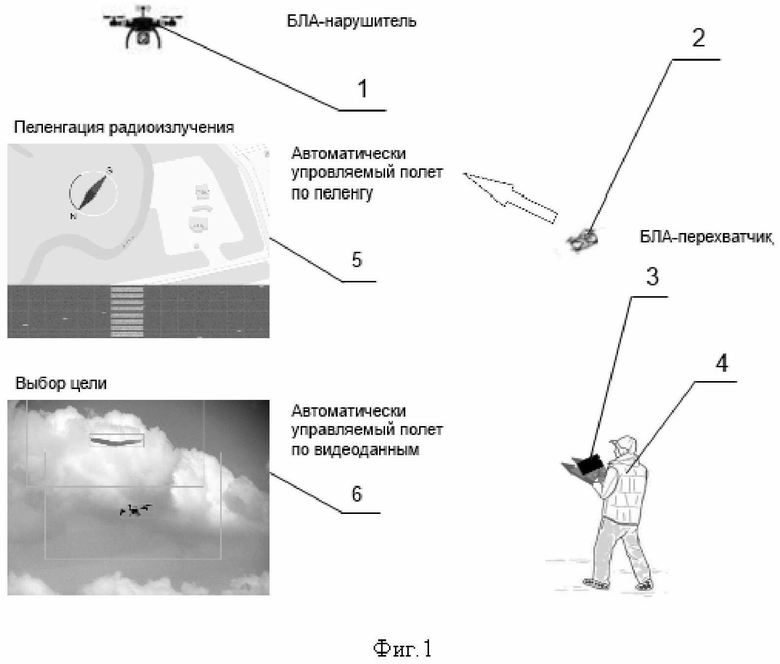
1. Способ противодействия беспилотным летательным аппаратам (БЛА), заключающийся в использовании двунаправленного канала радиосвязи, обеспечивающего передачу видеосигнала в систему обработки данных и определение координат нарушителя средствами вычислителя, расположенного на земле;
заключающийся в определении координат БЛА-нарушителя путем получения изображения от видеокамеры БЛА-перехватчика с последующим определением области кадра, соответствующего изображению БЛА-нарушителя, и с помощью известных методов вычислением координат БЛА-нарушителя по отношению к БЛА-перехватчику;
заключающийся также в том, что в случае расхождения курса БЛА-перехватчика с курсом БЛА-нарушителя БЛА-перехватчик может уйти на второй заход,
отличающийся тем, что для наведения БЛА-перехватчика на БЛА-нарушителя используется устройство, представляющее собой пульт дистанционного управления полетом, интегрированный со средствами пеленгации, вычислителем, блоком обработки радиосигналов, видеоданных и телеметрии, средствами спутниковой навигации, сенсорным монитором, средствами звуковой и визуальной идентификации радиоизлучений, а также конструктивным объединением перечисленных элементов, узлов, блоков и средств в одном компактном устройстве;
принятие решения об обнаружении БЛА-нарушителя осуществляется оператором, как на этапе пеленгации, так и на этапе принятия решения по получаемым устройством противодействия БЛА видеоданным;
после выхода в зону обнаружения БЛА-нарушителя бортовой видеокамерой – видео-захвата цели дальнейшее наведение на цель производится по видеоданным и данным телеметрии с борта дистанционно пилотируемого аппарата до ее кинетического поражения.
2. Способ по п.1, отличающийся тем, что перед уходом на второй заход для повторной атаки БЛА-перехватчик останавливается и зависает для обзора пространства оператором и принятия решения об атаке с автоматическим наведением по данным видеокамеры и телеметрии, принимаемых с борта дистанционно пилотируемого аппарата, пеленга на БЛА-нарушителя и нового угла азимута БЛА-перехватчика.
3. Способ по п.1, отличающийся тем, что обнаружение и распознавание цели - БЛА-нарушителя производится оператором по радиоизлучению ее бортовых радиоисточников с использованием графической и звуковой информации.
4. Способ по п.1, отличающийся тем, что полет БЛА-перехватчика до выхода в зону видео-захвата БЛА-нарушителя осуществляется по вычисленному на него пеленгу под автоматическим управлением устройства противодействия БЛА без использования режима самонаведения.
5. Способ по п.1, отличающийся тем, что вывод в зону видео-захвата с БЛА-нарушителем может при необходимости, например, при срыве автоматического сопровождения, осуществляться оператором с помощью средств дистанционного управления полетом, расположенных на корпусе устройство противодействия БЛА.
6. Устройство противодействия беспилотным летательным аппаратам, конструктивно выполненное в виде пульта управления дистанционно пилотируемых летательных аппаратов и состоящее из средств дистанционного управления полетом, двунаправленного канала радиосвязи, обеспечивающего передачу команд управления полетом и прием данных телеметрии и видеосигнала в вычислитель, блока обработки радиосигналов, видеоданных и телеметрии,
отличающиеся тем, что в состав устройства введены средства спутниковой навигации и сенсорный монитор, а на внешней стороне корпуса устройства установлены пеленгационные антенны, соединенные с радиоприемным устройством, сигнал с которого подается в блок обработки радиосигналов и видеоданных, который обеспечивает обнаружение радиосигналов бортовых средств БЛА, расчет пеленга на источник радиоизлучения и определение координат БЛА-нарушителя по видеоданным от видеокамеры БЛА-перехватчика по отношению к БЛА-перехватчику, отображение на сенсорном мониторе спектрограмм принимаемых сигналов, пеленга, кнопок управления принятием решений и автоматическое управление полетом по рассчитанным данным без непосредственного участия оператора,
в состав устройства также введен радиопередатчик, осуществляющий прием рассчитанного вычислителем цифрового сигнала, и обеспечивающий генерацию, и излучение радиосигнала, противодействующему нормальной работе БЛА-нарушителя,
устройство оснащено средствами звуковой идентификации цели вовремя процедуры радиообнаружения и пеленгации.
7. Устройство по п.6, отличающееся тем, что в качестве антенн, излучающих противодействующий нормальной работе БЛА-нарушителя радиосигнал, могут использоваться пеленгационные антенны.
| Способ противодействия беспилотным летательным аппаратам | 2020 |
|
RU2743401C1 |
| Способ перехвата летательных аппаратов самонаводящейся электроракетой | 2018 |
|
RU2685597C1 |
| Многоцелевой БПЛА-перехватчик | 2020 |
|
RU2723203C1 |
| US 20190285388 A1, 19.09.2019 | |||
| US 20200108926 A1, 09.04.2020. | |||

