Предлагаемое изобретение относится к системам самонаведения, в частности, к системам самонаведения летательного аппарата (ЛА) на наземные цели с помощью радиолокатора, использующего синтезирование апертуры антенны, либо доплеровское обужение луча.
Для обнаружения и поражения малоразмерных наземных целей необходимо применение радиолокационной станции (РЛС) с высокой разрешающей способностью, соответствующей размеру цели. В этом случае достигается максимальное соотношение сигнал/фон (максимальный контраст цели относительно фона). Постоянство требуемого линейного разрешения РЛС по азимуту достигается в радиолокаторе с синтезом апертуры (РСА) за счет когерентного накопления отраженного сигнала на интервале синтеза при движении ЛА по окружности, проходящей через цель.
Известен способ [1] пропорционального наведения ЛА со смещением, при котором используются данные измерений координат цели, полученные РСА. Согласно способу измеряют значения скорости сближения VR наводимого ЛА с наземным объектом, угловую скорость линии визирования цели в горизонтальной плоскости ω и боковое ускорение наводимого ЛА aБ. По измеренным данным и требуемому линейному разрешению РСА в горизонтальной плоскости δХ формируется сигнал управления в горизонтальной плоскости Δ в виде

Где J0 - навигационный параметр,
ΔωT - требуемое смещение угловой скорости визирования цели,
Д0 и Дк - дальности цели в начале и конце наведения,
k - коэффициент, определяющий точность наведения и стабилизацию линейного разрешения РСА,
λ - длина волны зондирующего сигнала,
ΔF - полоса пропускания доплеровского фильтра.
Недостатком способа пропорционального наведения ЛА со смещением является не постоянство линейного разрешения РСА по траектории наведения. Величина изменений оказывается не допустимо большой при работе по малоразмерной цели, соответственно наблюдаемость цели на фоне подстилающей поверхности не постоянна, возможен срыв сопровождения цели и наведения ЛА.
Известен способ [2], в котором одновременно измеряют значения бортового пеленга наземной цели β, угловой скорости линии визирования цели со в горизонтальной плоскости, дальность Д и радиальную скорость наземной цели VR, путевую скорость VГ, угол сноса θC и боковое ускорение aБ наводимого ЛА. Исходя из требуемого разрешения δХ, текущей дальности цели Д, скорости ЛА VГ, полосы пропускания доплеровского фильтра ΔF и длины волны зондирующего сигнала λ определяют требуемый бортовой пеленг цели βТ и угловую скорость линии визирования цели ωТ, формируют сигнал управления Δ в горизонтальной плоскости в виде

где Jβ и Jω - веса ошибок по бортовому пеленгу и угловой скорости линии визирования цели,
Jω - вес ошибки по угловой скорости линии визирования цели,
Qβ и Qω - коэффициенты, определяющие точность наведения по бортовому пеленгу и угловой скорости линии визирования цели в горизонтальной плоскости.
Недостатком способа являются большие амплитуды боковых ускорений и колебаний ЛА, наводимого по данным РСА, на начальном участке наведения. Большие амплитуды колебаний траектории ЛА на начальном участке наведения приводят к увеличению вероятности срыва ранее сопровождавшейся цели, увеличению времени отработки ошибок траектории ЛА и снижению экономичности наведения.
Известен способ [3], принятый в качестве прототипа, в котором одновременно измеряют значения бортового пеленга β, и угловой скорости линии визирования ω наземной цели, дальность цели Д, путевую скорость VГ и боковое ускорение наводимого ЛА aБ. Исходя из требуемого линейного азимутального разрешения δХ, начальной дальности цели Д0 в точке вывода ЛА на участок наведения (точке подлета), путевой скорости ЛА VГ, времени когерентного накопления Т и длины волны зондирующего сигнала λ рассчитывают требуемый бортовой пеленг цели βT0 и требуемую угловую скорость линии визирования цели ωТ в точке подлета; требуемый бортовой пеленг цели βT0 в точке вывода на начало участка наведения определяется как
требуемый бортовой пеленг цели βT при выводе ЛА к точке подлета определяется выражением
где Д - текущая дальность ЛА до цели;
требуемая угловая скорость линии визирования цели ωT(t) при подлете к точке начала участка наведения определяется выражением
для участка наведения рассчитывают текущий требуемый бортовой пеленг цели и требуемую угловую скорость визирования цели; требуемый бортовой пеленг цели на участке наведения определяется выражением
требуемая угловая скорость линии визирования цели на участке наведения должна быть постоянной, определяемой выражением
формируют сигнал управления в горизонтальной плоскости на участках вывода ЛА к точке начала наведения и на участке наведения в виде весовой суммы ошибок наведения по бортовому пеленгу [βT-β] и угловой скорости линии визирования цели [ωT-ω] по выражению

где Kβ и Кω - штрафы по ошибкам наведения ЛА по бортовому пеленгу и угловой скорости линии визирования цели соответственно.
Недостатком способа является то, что в законе управления ЛА веса ошибок наведения по бортовому пеленгу и угловой скорости визирования цели уточняются по результатам моделирования и могут быть не оптимальными в реальных условиях, отличных от условий моделирования. Кроме того, значения ошибок наведения по бортовому пеленгу и угловой скорости визирования цели в законе управления не учитывают прогнозируемые изменения их в последующей точке измерения, что приводит к снижению точности наведения.
Целью изобретения является оптимизация закона управления ЛА на участке наведения на наземную малоразмерную цель, обеспечивающего адаптивный выбор весов ошибок наведения ЛА по бортовому пеленгу и угловой скорости визирования цели без предварительного моделирования.
Заявленная цель достигается за счет того, что сигнал управления ЛА в текущей точке траектории построен на прогнозе ошибок бортового пеленга цели и угловой скорости визирования цели в последующей точке измерения и адаптации равенства вкладов ошибок наведения по бортовому пеленгу и угловой скорости визирования цели на азимутальное линейное разрешение РСА.
Для пояснения способа управления считаем, что уравнение движения ЛА описывается выражением:

где  - вектор наблюдаемых параметров цели в k-той точке траектории ЛА;
- вектор наблюдаемых параметров цели в k-той точке траектории ЛА;
Дk - дальность до цели в k-той точке траектории ЛА;
βk - угол в горизонтальной плоскости между вектором скорости ЛА и направлением на наземную цель (в дальнейшем называемым бортовым пеленгом цели) в k-той точке траектории ЛА;
ωk - угловая скорость направления на цель в горизонтальной плоскости (в дальнейшем называемая угловой скоростью линии визирования цели) в k-той точке траектории ЛА;
 - вектор связи параметров движения ЛА с управляющим параметром;
- вектор связи параметров движения ЛА с управляющим параметром;
Т - временной интервал между соседними измерениями наблюдаемых параметров цели;
 - значение горизонтальной проекции бокового ускорения ЛА (в дальнейшем называемым горизонтальным боковым ускорением) в k-той точке траектории.
- значение горизонтальной проекции бокового ускорения ЛА (в дальнейшем называемым горизонтальным боковым ускорением) в k-той точке траектории.
Требуемые параметры движения ЛА в k-той точке траектории ЛА должны обеспечить постоянство линейного азимутального разрешения РСА δХТ на участке наведения, при этом требуемые координаты цели ХTk+1 в (k+1) точке траектории должны быть [4]:




где βТk - требуемый бортовой пеленг цели в k-той точке траектории ЛА;
ωТ - требуемая угловая скорость линии визирования цели;
VГ - путевая (горизонтальная проекция скорости ЛА) скорость ЛА.
За счет влияния внешних и внутренних факторов имеются отклонения реальной траектории полета ЛА от требуемой. Наличие радиальной скорости цели в точке k вызывает изменение координат цели в k+1 точке траектории: по дальности на VГТ cosβk, по бортовому пеленгу цели на ωkТ, по азимутальной угловой скорости на  При этом значение Ф(Хk) - прогноз параметров цели в (k+1) точке траектории ЛА соответствует:
При этом значение Ф(Хk) - прогноз параметров цели в (k+1) точке траектории ЛА соответствует:
Предлагаемый закон управления ЛА в горизонтальной плоскости при движении ЛА к цели должен обеспечить:


Задачей оптимального управления является нахождение управляющего воздействия U=aБ, при котором Ф(Хk), определяемое выражением (5), было бы максимально близким к ФТ(Хk), определяемым выражением (2), в каждый момент времени. То есть управляющее воздействие U должно быть:

Требование (7) невозможно одновременно удовлетворить для всех компонент вектора X, поэтому в качестве критерия близости траектории к требуемой может быть рассмотрен скалярный параметр - весовая сумма дисперсий ошибок управления по компонентам вектора X:

Критерий определения необходимого управляющего воздействия имеет вид:

где  - матрица весовых коэффициентов, определяемая важностью совпадения конкретного параметра с соответствующим параметром требуемой траектории. При этом минимизация разности
- матрица весовых коэффициентов, определяемая важностью совпадения конкретного параметра с соответствующим параметром требуемой траектории. При этом минимизация разности  в выражении (10) за счет изменения U возможна лишь за счет тех компонент вектора X, дифференциальные уравнения которых непосредственно зависят от компонент вектора U (то есть в данном случае размерность Q-2×2).
в выражении (10) за счет изменения U возможна лишь за счет тех компонент вектора X, дифференциальные уравнения которых непосредственно зависят от компонент вектора U (то есть в данном случае размерность Q-2×2).
Решение (10) определяет оптимальное управление U из выражения:

и имеет вид:

С учетом матрицы Q требуемый параметр управления (требуемое горизонтальное боковое ускорение ЛА) на участке наведения должно быть:

при этом в качестве матрицы штрафов выступает обратная матрица дисперсий допустимых ошибок компонент вектора невязок ΔХ.
Допустимые значения дисперсий невязок выбираются исходя из допустимой ошибки по разрешающей способности σδх. Линейная разрешающая способность связана с бортовым пеленгом цели β и угловой скоростью линии визирования цели ω соотношениями [4]:

Исходя из этого, допустимые ошибки отработки бортового пеленга и угловой скорости направления на цель, определяются как:


С учетом (15) и (16) 
В установившемся режиме, когда β βТ, из (13) и (18) получаем требуемое горизонтальное боковое ускорение ЛА на участке наведения:
βТ, из (13) и (18) получаем требуемое горизонтальное боковое ускорение ЛА на участке наведения:

Параметр рассогласования текущего горизонтального бокового ускорения от требуемого для управления ЛА будет вычисляться по выражению:

где аБ - текущее горизонтальное боковое ускорение ЛА.
Отличия предлагаемого способа от прототипа заключаются в том, что в сигнале управления Д горизонтальным боковым ускорением на участке подлета и наведения требуемое боковое ускорение определяют выражением

где VГ - путевая скорость ЛА,
Т - интервал времени между соседними измерениями,
βТ и β - требуемый и текущий бортовой пеленг цели,
Д - текущая горизонтальная дальность цели,
ωТ и ω - требуемая и текущая угловая скорость линии визирования цели.
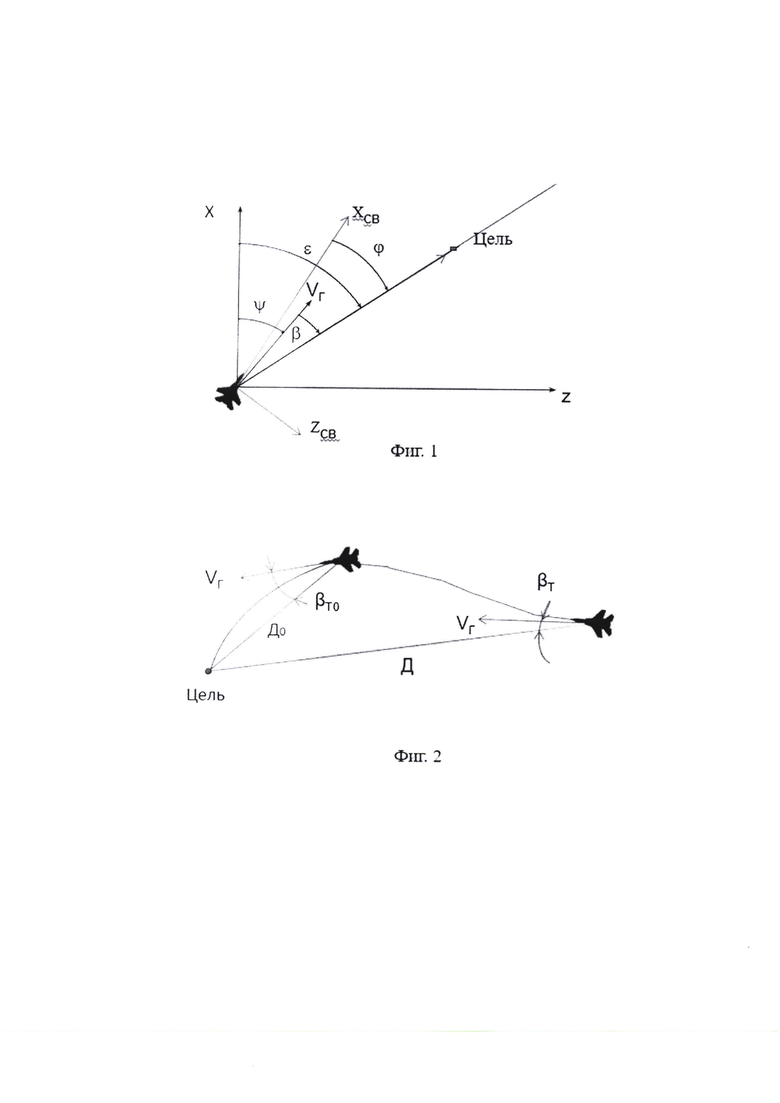
Согласно предлагаемому способу, полет ЛА к цели разделяется на участок вывода ЛА к началу участка наведения (к точке подлета) и участок наведения по данным РСА, далее называемый участком наведения. Вывод ЛА к точке подлета в соответствии с априорными данными о местоположении цели (ХЦ УЦ ZЦ) обеспечивается по данным инерциальной навигационной системы (ИНС), измеряющей текущие продольное, нормальное и боковое ускорение ЛА, составляющие скорости ЛА (VX VY VZ) в нормальной системе координат, углы тангажа, рысканья и крена (αт αр αкр) и местоположение (X Y Z) ЛА. Требуемые горизонтальные параметры полета ЛА в точке подлета (фиг. 2) определяются горизонтальной дальностью цели от точки подлета Д0 (определяется R0 - максимальной рабочей дальностью РСА и ΔY - высотой ЛА), бортовым пеленгом цели βТ0 и угловой скоростью линии визирования цели ωT0:





где Д0 - горизонтальная дальность цели от точки подлета; VT - путевая скорость ЛА.
По данным ИНС на участке подлета определяют: текущую горизонтальную дальность цели Д, текущий бортовой пеленг цели относительно вектора путевой скорости β и текущую угловую скорость линии визирования цели ω:



Требуемые текущие параметры наблюдения цели на участке полета ЛА к точке подлета (фиг. 2) [3]:


На участке наведения работает РСА, обнаруживающая и сопровождающая наземную цель, измеряющая текущую дальность цели R и угловое положение цели в полярной, связанной с осями Хсв, Yсв, Zсв ЛА;
Вычисляют радиус-вектор цели в связанной системе координат 
Преобразуют координаты радиус-вектора  из связанной системы координат в нормальную с использованием данных ИНС о углах крена αкр, тангажа αт и рысканья αр ЛА и известной матрицы преобразования М(αтαрαкр):
из связанной системы координат в нормальную с использованием данных ИНС о углах крена αкр, тангажа αт и рысканья αр ЛА и известной матрицы преобразования М(αтαрαкр):

Вычисляют текущий бортовой пеленг цели β относительно вектора путевой скорости ЛА (фиг. 1) и угловую скорость линии визирования цели ω:



Определяют требуемые текущие значения бортового пеленга цели βТ и угловой скорости линии визирования цели сот в соответствии с выражениями (4) и (5):
Формируют сигнал управления горизонтальным боковым ускорением ЛА на участке наведения по выражению (20):

Определяют дальность ДПН, с которой система переходит на прямое наведение [4, с. 595]:

Сущность предлагаемой системы наведения поясняется дальнейшим описанием и чертежами.
На фиг. 1 представлена геометрия визирования наземной цели.
На фиг. 2 представлена геометрия взаимосвязи между требуемым текущим бортовым пеленгом цели и требуемым бортовым пеленгом цели в точке подлета.
На фиг. 3 представлен упрощенный вариант системы наведения ЛА, реализующий предлагаемый способ.
На фиг. 4 представлены результаты расчета разрешения РСА по времени при моделировании наведения ЛА предлагаемым способом и способом прототипом.
На фиг. 5 представлены ошибки наведения по бортовому пеленгу цели от времени при наведении ЛА предлагаемым способом и способом-прототипом.
На фиг. 6 представлены результаты моделирования ошибки наведения по угловой скорости линии визирования цели от времени при наведении ЛА предлагаемым способом и способом прототипом.
На фиг. 7 представлены результаты моделирования динамической ошибки отработки требуемого горизонтального бокового ускорения ЛА от времени предлагаемым способом и способом-прототипом.
На фиг. 3 приняты следующие обозначения:
1 - Радиолокатор с синтезированием апертуры антенны (РСА);
2 - Вычислитель системы управления (ВСУ);
3 - Система управления (СУ);
4 - Инерциальная навигационная система (ИНС);
5 - Вычислитель горизонтальных координат цели (ВГКЦ);
6 - Вычислитель требуемых параметров (ВТП);
7 - Летательный аппарат (ЛА).
На фиг. 3 ИНС 4 через последовательно соединенные вычислитель горизонтальных координат цели 5, вычислитель требуемых параметров 6, вычислитель системы управления 2, систему управления 3 соединена с летательным аппаратом 7, первый выход вычислителя горизонтальных координат цели 5 соединен с вторым входом вычислителя системы управления 2, второй выход вычислителя горизонтальных координат цели 5 соединен с вторыми входами РСА 1 и вычислителя требуемых параметров 6, выход ИНС 4 соединен с первыми входами вычислителя горизонтальных координат цели 5, РСА 1 и вычислителя системы управления 2, выход РСА 1 соединен с вторым входом вычислителя горизонтальных координат цели 5, третий выход горизонтальных координат цели 5 соединен с четвертым входом вычислителя системы управления 2, летательный аппарат 7 механически связан с платформой ИНС 4, на третий вход вычислителя горизонтальных координат цели 5 вводят априорные координаты цели.
В соответствии со структурой на фиг. 3 система наведения ЛА работает следующим образом. Перед полетом ЛА 7 на третий вход вычислителя горизонтальных координат цели 5 приходят априорные данные о местоположении цели (ХЦ YЦ ZЦ). Во время полета ИНС 4, установленная на ЛА 7, измеряет текущее местоположении ЛА (X Y Z), составляющие скорости ЛА (VX VY VZ) в нормальной системе координат, углы тангажа, рысканья и крена (αtαрαкр), составляющие продольного, нормального и бокового ускорения ЛА (aПaНaБ), которые выводятся на первые входы РСА 1, вычислителя горизонтальных координат цели 5 и вычислителя системы управления 2.
РСА 1 моноимпульсного типа работает на участке наведения в режиме синтеза апертуры. Данные ИНС 4 используются РСА при выполнении фокусировки получаемых изображений сцены. После поиска и захвата цели РСА 1 выдает координаты сопровождаемой цели на второй вход вычислителя горизонтальных координат цели 5 в связанной системе координат 
Вычислитель горизонтальных координат цели 5:
преобразует по данным ИНС 4 радиус-вектор цели  из связанной системы координат в нормальную
из связанной системы координат в нормальную  определяет путевую скорость
определяет путевую скорость 
текущую дальность цели 
формирует на втором выходе команду переключения режима полета ЛА с режима подлета на режим наведения при R<R0 (максимальной рабочей дальности РСА). Данная команда кроме включения РСА 1 модифицирует работу самого вычислителя горизонтальных координат цели 5 и вычислителя требуемых параметров 6 на участках подлета и наведения;
вычисляет текущую горизонтальную дальность цели
горизонтальную дальность цели от точки подлета
бортовой пеленг цели относительно вектора скорости ЛА
угловую скорость линии визирования цели
выдает вычисленные значения: а) путевой скорости ЛА и дальности цели (VГ, Д) с первого выхода на первый вход вычислителя требуемых параметров 6 и второй вход вычислителя системы управления 2, б) бортового пеленга цели и угловой скорости линии визирования цели (β, ω) с третьего выхода на четвертый вход вычислителя системы управления 2.
Вычислитель требуемых параметров 6 определяет требуемые текущие значения бортового пеленга цели βТ и угловой скорости линии визирования цели ωТ:
и выдает значения (βT, ωТ) на третий вход вычислителя системы управления 2.
Вычислитель системы управления 2 формирует сигнал управления горизонтальным боковым ускорением ЛА в соответствии с выражением:

и выдает его через систему управления 3 на рули ЛА 7.
Все элементы системы наведения на фиг. 3 могут быть изготовлены по известной, существующей технологии. Операции, выполняемые вычислителем системы управления 2, вычислителем горизонтальных координат цели 5 и вычислителем требуемых параметров 6 могут быть выполнены на базе единой бортовой вычислительной машины.
В интересах оценки эффективности предлагаемого способа проведено моделирование процесса наведения ЛА на неподвижную малоразмерную наземную цель на участке наведения. Сравнительная оценка проводилась со способом прототипа, в системе управления которого формируется сигнал управления горизонтальным боковым ускорением ЛА по выражению:

где Кβ - весовой коэффициент по бортовому пеленгу цели;
Кω - весовой коэффициент по угловой скорости визирования цели.
Коэффициенты Кβ и Кω подобраны по результатам моделирования полета ЛА на скорости VГ=500 м/с, основным условием являлось выдерживание требуемого разрешения δХТ=2,5 м.
В качестве показателей эффективности приняты следующие величины:
ошибки наведения по бортовому пеленгу Δβ и угловой скорости визирования цели Δω;
азимутальное линейное разрешение, δХ;
динамическая ошибка отработки горизонтального бокового ускорения, Δ;
Условия моделирования:
требуемое азимутальное линейное разрешение РСА δХТ=2,5 м; время синтезирования и интервал времени между измерениями, ТС=Т=0,05 с;
дальность от точки подлета до цели Д0=7000 м;
путевая скорость ЛА VГ=550 м/с.
Имитировалось выведение ЛА в точку подлета по бортовому пеленгу и угловой скорости визирования цели с ошибкой 0,1 град и 0,001 град/с соответственно.
Поведение ЛА описывалось инерционным звеном, характеристики которого соответствовали выражению

Результаты моделирования поведения разрешения РСА δХТ, ошибки наведения по бортовому пеленгу цели Δβ, по угловой скорости линии визирования цели Δω и ошибки отработки требуемого горизонтального бокового ускорения ЛА Δ во времени представлены на фиг. 4-7, соответственно. Пунктирные линии соответствуют прототипу, сплошные -предлагаемому способу.
Из анализа представленных результатов можно сделать следующие выводы:
1. Предлагаемый способ и способ-прототип практически не отличаются по линейному разрешению и обеспечивают требуемое линейное разрешение 2,5 метра.
2. Ошибки наведения по бортовому пеленгу и угловой скорости линии визирования незначительно отличаются друг от друга, при этом для способа прототипа наблюдается систематическая ошибка, обусловленная алгоритмом управления, не учитывающим прогноз ошибок наведения в последующей точке измерения и условие равенства вкладов ошибок наведения по бортовому пеленгу и угловой скорости визирования в ошибке требуемого разрешения.
3. Максимумы динамической ошибки отработки требуемого горизонтального бокового ускорения ЛА на начальном интервале наведения в течение 0,5 с предлагаемым способом Δ1 более чем в 2 раза меньше, чем у способа прототипа Δ2. В установившемся режиме на участке наведения (t≥25 с) формируемые сигналы управления практически идентичны.
Пользуясь сведениями, представленными в материалах заявки, предлагаемый способ наведения на наземные цели может быть реализован на базе существующих известных устройств, используемых в навигации ЛА и вычислительной технике. Способ позволяет адаптивно настраивать веса ошибок наведения ЛА на цель по бортовому пеленгу и угловой скорости визирования цели без дополнительного моделирования. Кроме того, предлагаемый способ по данным моделирования в сравнении с прототипом снижает как ошибки смещения в установившемся режиме по пеленгу и угловой скорости линии визирования, так и перегрузки переходного процесса по отработке ошибки горизонтального бокового ускорения.
ЛИТЕРАТУРА
1. Патент России 2148235 Способ пропорционального наведения летательных аппаратов на наземные объекты.
2. Патент России 2210801 Универсальный способ наведения самолетов на наземные цели.
3. Патент России 2664258 Способ наведения ЛА на наземные цели по данным радиолокатора с синтезированием апертуры антенны.
4. Авиационные системы радиовидения. Монография/ под ред. Г.С. Кондратенкова. - М.: «Радиотехника» 2015.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2164654C2 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2003 |
|
RU2229671C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2004 |
|
RU2261411C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 2012 |
|
RU2525650C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ИСТОЧНИК РАДИОИЗЛУЧЕНИЯ В ДВУХПОЗИЦИОННОЙ ПАССИВНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ | 2004 |
|
RU2262649C1 |
| СПОСОБ КОМАНДНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ | 2009 |
|
RU2408846C1 |
Изобретение относится к способу наведения летательного аппарата (ЛА) на наземные цели по данным радиолокатора с синтезированной апертурой антенны (РСА). Для наведения ЛА измеряют по данным инерциальной навигационной системы текущих горизонтального бокового ускорения ЛА, путевой скорости, углов крена, тангажа, рысканья и координат ЛА в нормальной земной системе координат, производят подлет ЛА к участку наведения и наведение определенным образом. Обеспечивается увеличение точности наведения ЛА без предварительного моделирования. 7 ил.
Способ наведения летательного аппарата (ЛА) на наземные цели по данным радиолокатора с синтезированной апертурой антенны (РСА), включающий: измерение по данным инерциальной навигационной системы (ИНС) текущего горизонтального бокового ускорения ЛА aБ, текущей путевой скорости VГ, текущих углов крена, тангажа и рысканья и координат ЛА в нормальной земной системе координат (НЗСК); полет ЛА к цели разделяется на участок подлета к участку наведения и участок наведения, траектория ЛА на участке подлета и требуемое горизонтальное боковое ускорение рассчитываются по данным ИНС о координатах ЛА, составляющих скорости ЛА, углового положения ЛА и расчетной траектории по известным координатам цели; траектория ЛА на участке наведения и требуемое горизонтальное боковое ускорение рассчитываются по данным бортового радиолокатора с синтезированной апертурой (РСА), измеряющего наклонную дальность и пеленг цели в связанной с ЛА системе координат, преобразования измеренных координат цели из связанной системы координат в НЗСК с учетом данных ИНС о угловом положении ЛА; на обоих участках полета ЛА для расчета требуемой траектории вычисляют горизонтальную дальность цели Д, бортовой пеленг цели β и угловую скорость линии визирования цели ω; текущее значение угловой скорости линии визирования цели на участках подлета ЛА к участку наведения и на участке наведения определяют по выражению

формирование сигнала управления горизонтальным боковым ускорением ЛА Δ на участках вывода ЛА к началу участка наведения и на участке наведения производится по закону
где aБТ - требуемое горизонтальное боковое ускорение ЛА;
для расчета требуемого горизонтального бокового ускорения aБТ на обоих участках полета ЛА к цели вычисляют требуемый бортовой пеленг цели βТ и угловую скорость линии визирования цели ωT; требуемый бортовой пеленг цели βТ и угловая скорость линии визирования цели ωT на участке вывода ЛА к точке подлета определяется выражениями:
где λ - длина волны зондирующего сигнала,
Д0 - задаваемая горизонтальная дальность цели от точки подлета,
Tс - время когерентного накопления сигнала в РСА,
δХТ - заданное линейное разрешение РСА;
требуемый бортовой пеленг цели и угловая скорость линии визирования цели на участке наведения вычисляются по выражениям
отличающийся тем, что в требуемое горизонтальное боковое ускорение ЛА  на участке наведения определяется выражением
на участке наведения определяется выражением

где Т - интервал времени между соседними измерениями.
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ЛИНИЕЙ ВИЗИРОВАНИЯ АНТЕННЫ | 2004 |
|
RU2282230C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРИЦЕЛИВАНИЯ ПО ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2016 |
|
RU2629130C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА НАЗЕМНЫЕ ЦЕЛИ ПО ДАННЫМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2016 |
|
RU2664258C2 |
| ПОЛУАКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2010 |
|
RU2414781C1 |
| CA 3001653 A1, 27.04.2017. | |||

