Заявляемое техническое решение представляет собой механизм для преобразования возвратно-поворотных или возвратно-поступательных движений небольшой амплитуды и частоты в быстрое вращательное движение исполнительных органов. Оно предназначено преимущественно для использования в устройствах, приводимых в действие мускульной силой человека, таких как индивидуальные транспортные средства типа роликовых коньков и скейтбордов, а также для тренажеров и других устройств.
Привод включает педаль или другой элемент для воспринимания внешних усилий - рукоятку, ползун и т.п., и трансмиссию, связывающую этот элемент с исполнительными органами устройства, например роликами коньков.
Обзор известных решений и анализ требований к педальному приводу даны в RU 2274576 С2.
Основные выводы:
- для удобства пользователя педаль должна иметь двухопорное шарнирное крепление со средним расположением оси качания;
- ввиду больших динамических нагрузок от веса пользователя, жестких габаритных ограничений, необходимости большого передаточного числа и сложности условий эксплуатации (дорожные пыль, песок, влага) для первой ступени трансмиссии, где действуют наибольшие нагрузки, предпочтителен механизм с гибкими связями. Причем такой, в котором передача крутящего момента происходит не за счет трения между гибкими элементами и шкивами, а за счет закрепления концов гибких элементов на ведущих шкивах;
- по этой причине из всех видов гибких связей применимы только ленточная и тросовая. Потому в дальнейшем под термином «механизм с гибкими связями» понимаются только ленточные или тросовые передачи, под термином «гибкий элемент» - только лента или трос (шнур) из гибкого высокопрочного материала;
- для достижения необходимой частоты вращения исполнительных органов в большинстве случаев требуется вторая ступень трансмиссии - мультипликатор. Благодаря уменьшению нагрузок первой ступенью в качестве второй ступени могут использоваться различные механизмы, в том числе зубчатые.
Все эти выводы реализованы в RU 2274576. Однако и этому техническому решению присущи недостатки, а именно:
- наличие выступающих вверх деталей трансмиссии, увеличивающих габариты устройства и создающих неудобства для пользователя;
- трансмиссия связывает педаль только с одним исполнительным органом - задней парой роликов. При повороте стопы вперед и переносе центра давления на носок педали сила давления на задние ролики быстро уменьшается, вплоть до их отрыва от дороги, что вызывает пробуксовку роликов;
- в заданных габаритах обычный зубчатый механизм способен обеспечить лишь небольшое передаточное число трансмиссии, что ограничивает скоростные возможности устройства;
- не предусмотрена возможность оперативного изменения передаточного числа трансмиссии.
В качестве ближайшего аналога выбрана конструкция педального привода из RU 2067481 C1, соответствующая предлагаемой по наибольшему числу признаков. В данном приводе шарнир крепления педали расположен в средней ее части, трансмиссия включает механизм с гибкими связями и механизмы свободного хода, связывает педаль с обоими исполнительными органами устройства и обладает двусторонним действием (при прямом и обратном ходах педали). В качестве механизма с гибкими связями использованы два полиспаста, имеющие несколько шкивов каждый и общий для них гибкий элемент, переброшенный через центральный шкив. Полиспасты выполняют функции как первой, так и второй ступеней трансмиссии: благодаря распределению усилия ноги на несколько шкивов и отрезков гибкого элемента снижаются нагрузки на эти детали, а благодаря увеличению скорости движения гибкого элемента повышается передаточное число трансмиссии.
Гибкий элемент закреплен своими концами на передней и задней частях педали недалеко от оси ее крепления. Он свободно переброшен через несколько опорных шкивов, не передающих крутящий момент, и намотан на ведущие шкивы («приводные барабаны»), передающие крутящий момент на оси исполнительных органов. Опорные шкивы рассредоточены по длине устройства и установлены каждый на своей оси вращения. Часть из них, а именно подвижные шкивы, закреплены на педали и движутся вместе с нею; другая часть - неподвижные шкивы, закреплены на раме устройства. Ведущие шкивы закреплены на осях исполнительных органов и соединены с этими осями посредством механизмов свободного хода. Исполнительные органы - две пары роликов - скреплены с осями.
Недостатки ближайшего аналога:
- фактически одноопорное крепление педали, т.к. второй ее опорой служит тормоз, случайное нажатие на который приведет к непроизвольному торможению. Этот недостаток преодолен в RU 2274576 и потому в дальнейшем не рассматривается;
- передача крутящего момента посредством трения между ведущими шкивами и гибким элементом, без фиксации последнего, неизбежно приведет к проскальзыванию гибкого элемента, а значит к уменьшению полезного хода педали. Этот недостаток также устранен в RU 2274576;
- рассредоточенное одиночное размещение опорных шкивов усложняет конструкцию и значительно уменьшает передаточное число трансмиссии, т.к. с приближением к оси крепления педали амплитуда перемещений подвижных шкивов быстро падает;
- закрепление подвижных шкивов и концов гибкого элемента непосредственно на педали делает невозможным заключение трансмиссии в закрытый корпус с целью ее защиты от внешних воздействий (пыль, влага, посторонние предметы);
- ведущие шкивы имеют большой диаметр, т.к. внутри них проходят оси исполнительных органов. Это уменьшает передаточное число трансмиссии;
- исполнительные органы скреплены с их осями, а потому частота вращения исполнительных органов в каждой их паре и между парами всегда одинакова, что затрудняет повороты транспортного средства, т.е. ухудшает его управляемость;
- не предусмотрены меры для распределения наматываемого троса по длине ведущих шкивов. В результате витки троса будут ложиться один на другой, затем соскальзывать. Первое приведет к нерегулярному изменению передаточного числа, второе - к рывкам в трансмиссии;
- предлагаемое «защемление» гибкого элемента на опорных шкивах едва ли может обеспечить надежное и оперативное, на ходу, изменение передаточного числа трансмиссии.
В дальнейшем все шкивы, передающие крутящий момент, будем называть ведущими, т.к. каждый из них является ведущим по отношению к другому шкиву или исполнительному органу. Ось вращения, совершающую линейные перемещения в процессе работы, будем называть подвижной осью, а размещенные на ней шкивы - подвижными шкивами.
Техническим результатом заявляемого решения должно стать повышение эффективности привода. Поставленная задача решается путем изменения кинематической схемы трансмиссии. Для этого в известном приводе, включающем педаль, закрепленную шарнирно с возможностью поворотов на заданный угол в перпендикулярной педали продольной плоскости, и трансмиссию, кинематически связывающую педаль с исполнительными органами устройства и включающую механизм с гибкими связями и механизмы свободного хода, согласно заявляемому решению
все подвижные опорные шкивы размещены на общей подвижной оси вращения, соединенной с педалью посредством, например, рычага, присоединенного к педали вблизи оси ее крепления и расположенного в пространстве между исполнительными органами устройства;
неподвижные опорные шкивы размещены группами на общих осях, например осях исполнительных органов.
Сосредоточенное размещение шкивов на небольшом числе осей упрощает конструкцию трансмиссии и позволяет повысить ее передаточное число за счет обеспечения максимально возможной амплитуды перемещений для всех подвижных шкивов, а не только для крайних.
Размещение подвижной оси и точек закрепления гибких элементов на рычаге, отходящем от педали вблизи оси ее крепления и расположенном между осями исполнительных органов, позволяет заключить всю трансмиссию в закрытый корпус, обеспечивающий ее защиту от внешних воздействий и не увеличивающий габариты устройства.
Следует отметить, что опорные шкивы, первые от связанных с ними ведущих шкивов, расположены наклонно к своей оси вращения. Это обеспечивает распределенную намотку шнуровых гибких элементов на ведущие шкивы, что исключает непредсказуемые изменения передаточного числа и вызываемые ими рывки в трансмиссии.
К тому же участки трансмиссии, связывающие педаль с разными, например передними и задними исполнительными органами или их группами, имеют неодинаковое передаточное число, что позволяет подобрать наиболее удобное для пользователя соотношение частот вращения разных исполнительных органов.
Помимо этого, рычаг, на котором закреплены подвижная ось вращения и концы гибких элементов, жестко скреплен с педалью. Это наиболее простой вариант конструкции.
В то же время названный рычаг может быть присоединен к педали с возможностью поворотов относительно педали в продольной плоскости на угол, задаваемый углом поворота педали, а сам привод дополнительно снабжен механизмом поворота рычага, кинематически связывающим рычаг с педалью и корпусом устройства. Такое решение позволяет, в частности, увеличить амплитуду перемещений закрепленных на рычаге шкивов и концов гибких элементов, а значит, повысить передаточное число трансмиссии.
При этом возможно, что механизм поворота рычага выполнен с фиксированным соотношением углов поворота рычага относительно педали и педали относительно корпуса устройства. Данный вариант наиболее прост в реализации.
Не исключено, однако, что механизм поворота рычага выполнен с возможностью оперативного изменения соотношения углов поворота рычага и педали за счет, например, изменения геометрических параметров механизма. Благодаря этому достигается оперативное изменение передаточного числа трансмиссии с целью приведения его в соответствие с изменившимися условиями движения.
При этом трансмиссия включает дополнительные ведущие шкивы неодинаковых диаметров, установленные соосно друг другу, причем шкив меньшего диаметра связан двумя гибкими элементами, закрепленными на нем и намотанными на него в противоположных направлениях, через опорные шкивы передней и задней осей с подвижным рычагом, а шкив большего диаметра связан двумя дополнительными гибкими элементами, также закрепленными на нем и намотанными на него в противоположных направлениях, с каждым из ведущих шкивов исполнительных органов. Наличие таких шкивов позволяет значительно, пропорционально отношению их диаметров, увеличить передаточное число трансмиссии или уменьшить количество опорных шкивов.
Причем дополнительные ведущие шкивы могут быть постоянно скреплены между собой. Это самый простой для исполнения вариант.
Возможно, однако, что дополнительные ведущие шкивы соединены между собой с возможностью их оперативного скрепления - раскрепления, а сам привод включает механизм скрепления - раскрепления дополнительных ведущих шкивов. Это дает возможность пользователю выбирать из ряда возможных передаточных чисел трансмиссии наиболее подходящее для данных условий, т.е. осуществить «переключение передач».
Следует отметить, что исполнительным органом механизма скрепления-раскрепления шкивов служит подвижное шпоночное соединение. Также им может служить подвижное шлицевое соединение. Выбор типа соединения определяется конструктивными и прочностными соображениями.
Притом дополнительные ведущие шкивы могут быть установлены на скрепленной с рычагом подвижной оси. Это дает дополнительный выигрыш в величине передаточного числа.
Вместе с тем дополнительные ведущие шкивы могут быть установлены по меньшей мере на одной закрепленной в корпусе неподвижной оси. Такое решение облегчает реализацию механизма переключения передач.
Кроме того, ведущими шкивами осей исполнительных органов служат сами эти оси, для чего каждая из них связана гибкими элементами через опорные шкивы и, возможно, дополнительные ведущие шкивы с подвижным рычагом и соединена отдельным механизмом свободного хода с каждым из установленных на ней исполнительных органов.
Совмещение ведущих шкивов с ведущими осями позволяет уменьшить диаметр этих шкивов и, тем самым, повысить передаточное число трансмиссии, а в сочетании с оснащением каждого исполнительного органа своим механизмом свободного хода - сделать транспортное средство более удобным в эксплуатации благодаря улучшению его управляемости.
При этом механизмы свободного хода, связывающие ведущие оси с установленными на них исполнительными органами, размещены в ступицах исполнительных органов. Это дает возможность не увеличивать число узлов трения.
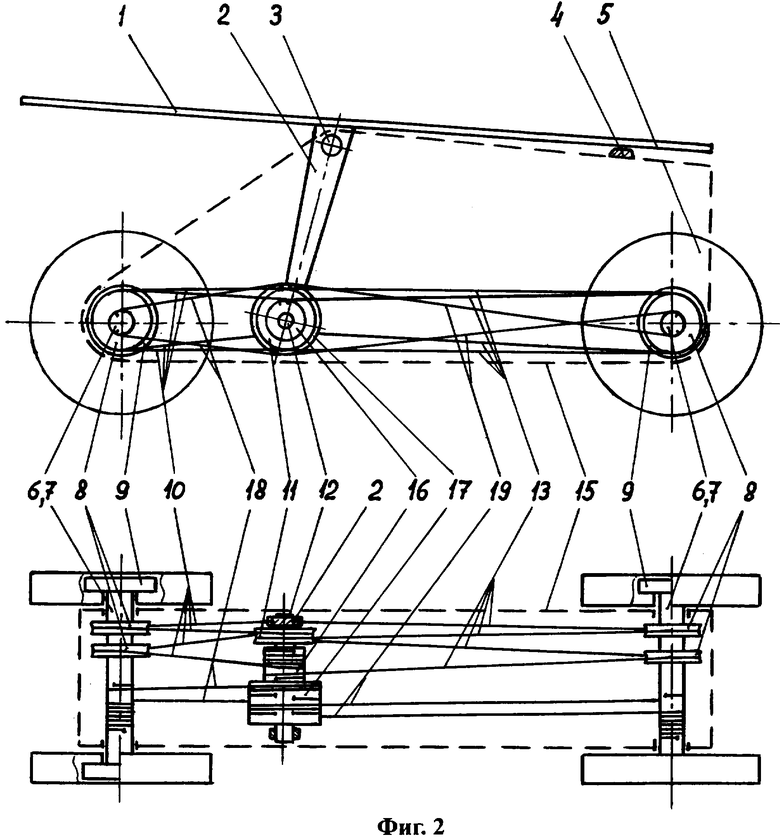
Заявляемое техническое решение поясняется схемами фиг.1 и 2. В качестве примера выбран привод для двухколейных четырехроликовых коньков. Возможны также варианты двух- и трехроликовых коньков и другие виды устройств. На фиг.1 представлена схема привода с двумя ведущими шкивами на осях исполнительных органов и двумя механизмами свободного хода. На фиг.2 - с двумя дополнительными ведущими шкивами на подвижной оси, с осями исполнительных органов в качестве основных ведущих шкивов и с четырьмя механизмами свободного хода. Показаны виды сбоку и сверху (без педали).
Цифровые обозначения на фигурах: 1 - педаль, 2 - подвижный рычаг, 3 - ось крепления педали, 4 - вторая опора педали, 5 - исполнительные органы, 6 - оси вращения роликов, 7 - неподвижные ведущие шкивы, 8 - неподвижные опорные шкивы, 9 - механизмы свободного хода, 10 - гибкий элемент переднего полиспаста, 11 - подвижные опорные шкивы, 12 - подвижная ось вращения, 13 - гибкий элемент заднего полиспаста, 14 - соединительный гибкий элемент, 15 - корпус трансмиссии, 16 - дополнительный ведущий шкив малого диаметра, 17 - дополнительный ведущий шкив большого диаметра, 18 и 19 - дополнительные гибкие элементы.
Педаль 1 и скрепленный с нею подвижный рычаг 2 закреплены на оси крепления педали 3. Фиксированное опорное положение педали обеспечивается второй опорой 4 под задником педали.
В приводе фиг.1 ролики 5 скреплены с их осями 6. На этих же осях свободно установлены неподвижные шкивы - ведущие 7 и опорные 8, а также механизмы свободного хода 9, связывающие ведущие шкивы 7 с осями исполнительных органов 6. Гибкий элемент 10 соединяет рычаг 2 через опорные шкивы передней оси 8 и подвижные опорные шкивы 11, свободно установленные на скрепленной с рычагом подвижной оси 12, с ведущим шкивом передней оси 7. Гибкий элемент 13 соединяет рычаг 2 через опорные шкивы задней оси 8 и подвижные опорные шкивы 11 с ведущим шкивом задней оси 7. Гибкий элемент 14, закрепленный своими концами на ведущих шкивах передней и задней осей и переброшенный через подвижный опорный шкив, замыкает гибкую связь, обеспечивая возможность ее двусторонней работы. К каждому ведущему шкиву крепятся два гибких элемента, намотанных на шкив в противоположных направлениях. Они могут быть выполнены и как один гибкий элемент, закрепленный на шкиве своей серединой. Места крепления показаны штрихами (условно).
Шкивы передней и подвижной осей совместно с гибкими элементами 10 и 14 образуют первый полиспаст трансмиссии, шкивы задней и подвижной осей совместно с гибкими элементами 13 и 14 - второй. Вся трансмиссия заключена в корпус 15.
Функцию рычага 2 может исполнять, например, ребро жесткости педали или стержневая рама. По конструктивным соображениям неподвижные опорные шкивы 7 могут размещаться не на осях исполнительных органов, а на отдельных закрепленных в корпусе осях.
Передаточное число трансмиссии, равное числу оборотов роликов на одно качание педали вперед или назад, определяется величиной угла поворота педали, длиной рычага и местоположением точек крепления гибких элементов на нем, числом опорных шкивов в каждом полиспасте и диаметром ведущих шкивов. Выбрав неодинаковые для переднего и заднего полиспастов местоположение точек крепления гибких элементов, число опорных шкивов или диаметр ведущих шкивов, можно получить трансмиссию с различными значениями передаточного числа для передних и задних исполнительных органов.
Привод фиг.2 дополнительно включает установленные на подвижной оси 12 ведущие шкивы 16 и 17. Рычаг 2 соединен гибкими элементами 10 и 13 через опорные шкивы 8 и 11 с дополнительным ведущим шкивом малого диаметра 16, а не с ведущими шкивами исполнительных органов, как в схеме фиг.1. В свою очередь, дополнительный ведущий шкив большого диаметра 17 соединен двумя парами закрепленных на нем гибких элементов 18 и 19 с ведущими шкивами исполнительных органов, которыми служат оси 6. Каждый из роликов связан с осью через отдельный механизм свободного хода 9, размещенный в ступице ролика.
Дополнительные ведущие шкивы 16 и 17 могут быть либо постоянно скреплены между собой, либо установлены с возможностью их скрепления-раскрепления. Например, с помощью перемещаемых в осевом направлении шпонок. В первом случае трансмиссия имеет одно фиксированное передаточное число, во втором - два. При нескольких дополнительных шкивах разных диаметров количество значений передаточного числа определяется количеством таких шкивов.
Дополнительные ведущие шкивы могут быть установлены на отдельной неподвижной оси или же на осях исполнительных органов. При этом схема их включения в трансмиссию не меняется. В обеих схемах фиг.1 и 2 подвижный рычаг 2 может быть установлен с возможностью поворотов относительно педали в продольном направлении. Этой цели может служить, например, кулисный механизм, в котором рычаг является кулисой, а ползун соединен с корпусом устройства. В таком случае передаточное число трансмиссии будет зависеть и от параметров механизма поворота рычага.
Для предупреждения провисания гибких элементов, вызванного их постепенным вытяжением, трансмиссия может быть снабжена устройством натяжения.
В исходном положении центр давления на педаль расположен между осью ее крепления 3 и задней опорой 4. Педаль и все шкивы неподвижны, но благодаря механизмам свободного хода возможно движение вперед накатом.
При переносе центра давления на носок педали (на фиг. он слева) рычаг 2, фиг.1, смещает подвижные шкивы вправо, вытягивая гибкий элемент 10 переднего полиспаста. Это заставляет передний ведущий шкив 7 вращаться по часовой стрелке. Вращение передается механизмом свободного хода 9 на переднюю ось 6 и скрепленные с нею ролики 5. Коньки движутся вперед. В это же время соединительный гибкий элемент 14, наматываясь на передний ведущий шкив 7, заставляет задний вращаться против часовой стрелки, наматывая на себя гибкий элемент 13 заднего полиспаста. Благодаря механизму свободного хода вращение не передается на заднюю ось, задние ролики крутятся вперед в режиме свободного хода.
При переносе центра давления на задник педали рычаг смещает подвижные шкивы влево и все происходит наоборот. Гибкий элемент 13 заставляет задний ведущий шкив 7 вращаться по часовой стрелке. Наматываясь на него, гибкий элемент 14 вращает передний ведущий шкив против часовой стрелки. Ведущими становятся задние ролики, передние крутятся в режиме свободного хода. Таким образом, при каждом движении ноги ведущей становится та пара роликов, на которую приходится наибольшая нагрузка от веса пользователя.
Работа привода фиг.2 отличается тем, что при нажатии на носок педали вытягиваемый гибкий элемент 10 заставляет вращаться по часовой стрелке дополнительный ведущий шкив малого диаметра 16 и скрепленный с ним дополнительный шкив большого диаметра 17. Посредством одного из гибких элементов пары 18 вращение по часовой стрелке передается непосредственно на переднюю ведущую ось 6 и через механизмы свободного хода 9 - на передние ролики 5. Одновременно один из гибких элементов пары 19, наматываясь на шкив 17, вращает заднюю ось против часовой стрелки. Благодаря механизмам свободного хода 9 это вращение не передается на задние ролики.
При возвратном движении педали подвижная ось 12 смещается влево. Вытягиваемый гибкий элемент 13 заставляет вращаться дополнительные ведущие шкивы 16 и 17 против часовой стрелки. Но в силу того, что гибкие элементы 19 расположены перекрестно, задняя ведущая ось вращается по часовой стрелке. Ведущими становятся задние ролики, передние крутятся в режиме свободного хода.
В приводах обеих схем в любой фазе движения вращение роликов назад невозможно, т.к. возникающее при этом усилие передается на педаль и блокируется мышцами ноги, а в исходном положении педали - задней опорой. «Отдача» отсутствует, возможен подъем в гору.
«Переключение передач» посредством изменения угла поворота рычага или скрепления-раскрепления дополнительных ведущих шкивов осуществляется вручную и без снятия коньков с ноги. Возможно, в движении.
В схеме фиг.2 благодаря «индивидуальным» механизмам свободного хода ролики в каждой паре могут вращаться с разными скоростями. Это облегчает выполнение поворотов без отрыва роликов от дороги, т.е. улучшает управляемость транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2008 |
|
RU2392166C1 |
| Веломобиль | 1986 |
|
SU1399210A1 |
| ПРИВОД ВЕЛОСИПЕДА (ВАРИАНТЫ) | 2013 |
|
RU2539260C1 |
| РОЛЛЕР | 1991 |
|
RU2016807C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОЧИСТКИ И ОБРАБОТКИ ПОВЕРХНОСТЕЙ "РОП" | 2001 |
|
RU2236313C2 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2521469C1 |
| ПРИВОД ПЕДАЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2525185C2 |
| ПУЛЬСИРУЮЩИЙ ВОЗДУШНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ (ВАРИАНТЫ) | 2001 |
|
RU2200864C2 |
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
Решение относится к рычажному приводу преимущественно для роликовых коньков. Привод содержит педаль (1), механизм с гибкими связями (10), механизмы (9) свободного хода. Шкивы механизма с гибкими связями (10) размещены группами на связанной с педалью подвижной оси (12) и осях (6) исполнительных органов. Увеличение и оперативное изменение передаточного числа достигаются с помощью подвижного рычага (2) и дополнительных ведущих шкивов неодинаковых диаметров, которые соединены между собой с возможностью их оперативного скрепления-раскрепления. Решение направлено на повышение эффективности привода. 4 н. и 12 з.п. ф-лы, 2 ил.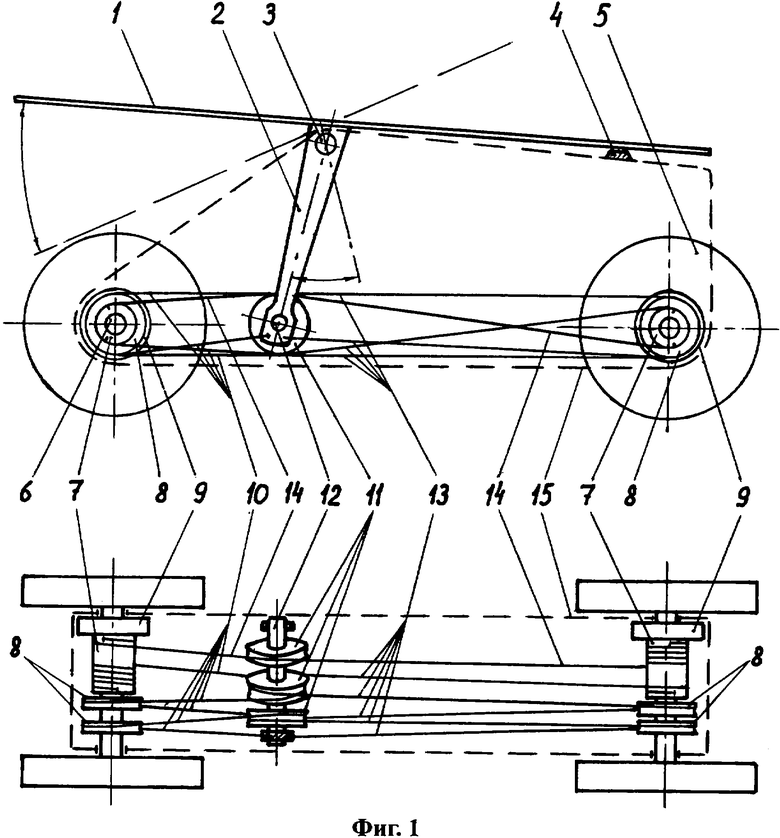
1. Педальный привод, включающий педаль, закрепленную шарнирно с возможностью поворотов на заданный угол в перпендикулярной педали продольной плоскости, и трансмиссию, кинематически связывающую педаль с исполнительными органами устройства и включающую механизм с гибкими связями и механизмы свободного хода,
отличающийся тем, что все подвижные опорные шкивы размещены на общей подвижной оси вращения, соединенной с педалью посредством, например, рычага, присоединенного к педали вблизи оси ее крепления и расположенного в пространстве между исполнительными органами устройства;
неподвижные опорные шкивы размещены группами на общих осях, например осях исполнительных органов.
2. Педальный привод по п.1, отличающийся тем, что опорные шкивы, первые от связанных с ними ведущих шкивов, расположены наклонно к своей оси вращения.
3. Педальный привод по п.1, отличающийся тем, что участки трансмиссии, связывающие педаль с разными, например передними и задними, исполнительными органами или их группами, имеют неодинаковое передаточное число.
4. Педальный привод по п.1, отличающийся тем, что рычаг, на котором закреплены подвижная ось и концы гибких элементов, жестко скреплен с педалью.
5. Педальный привод, включающий педаль, закрепленную шарнирно с возможностью поворотов на заданный угол в перпендикулярной педали продольной плоскости, и трансмиссию, кинематически связывающую педаль с исполнительными органами устройства и включающую механизм с гибкой связью и механизмы свободного хода,
отличающийся тем, что все подвижные опорные шкивы размещены на общей подвижной оси вращения, соединенной с педалью посредством, например, рычага, присоединенного к педали вблизи оси ее крепления и расположенного в пространстве между исполнительными органами устройства;
неподвижные опорные шкивы размещены группами на общих осях, например осях исполнительных органов;
причем рычаг, на котором закреплены подвижная ось вращения и концы гибких элементов, присоединен к педали с возможностью поворотов относительно педали в продольной плоскости на угол, задаваемый углом поворота педали, а сам привод дополнительно снабжен механизмом поворота упомянутого рычага, кинематически связывающим рычаг с педалью и корпусом устройства.
6. Педальный привод по п.5, отличающийся тем, что механизм поворота рычага выполнен с фиксированным соотношением углов поворота рычага и педали.
7. Педальный привод по п.5, отличающийся тем, что механизм поворота рычага выполнен с возможностью оперативного изменения соотношения углов поворота рычага и педали за счет, например, изменения геометрических параметров механизма.
8. Педальный привод, включающий педаль, закрепленную шарнирно с возможностью поворотов на заданный угол в перпендикулярной педали продольной плоскости, и трансмиссию, кинематически связывающую педаль с исполнительными органами устройства и включающую механизм с гибкой связью и механизмы свободного хода,
отличающийся тем, что все подвижные опорные шкивы размещены на общей подвижной оси вращения, соединенной с педалью посредством, например, рычага, присоединенного к педали вблизи оси ее крепления и расположенного в пространстве между исполнительными органами устройства;
неподвижные опорные шкивы размещены группами на общих осях, например осях исполнительных органов;
при этом трансмиссия включает дополнительные ведущие шкивы неодинаковых диаметров, установленные соосно друг другу, причем шкив меньшего диаметра связан двумя гибкими элементами, закрепленными на нем и намотанными на него в противоположных направлениях, через опорные шкивы передней и задней осей с подвижным рычагом, а шкив большего диаметра связан двумя дополнительными гибкими элементами, также закрепленными на нем и намотанными на него в противоположных направлениях, с каждым из ведущих шкивов исполнительных органов.
9. Педальный привод по п.8, отличающийся тем, что дополнительные ведущие шкивы постоянно скреплены между собой.
10. Педальный привод по п.8, отличающийся тем, что дополнительные ведущие шкивы соединены между собой с возможностью их оперативного скрепления-раскрепления, а сам привод включает механизм скрепления-раскрепления дополнительных ведущих шкивов.
11. Педальный привод по п.10, отличающийся тем, что исполнительным органом механизма скрепления-раскрепления дополнительных ведущих шкивов служит подвижное в осевом направлении шпоночное соединение.
12. Педальный привод по п.10, отличающийся тем, что исполнительным органом механизма скрепления-раскрепления дополнительных ведущих шкивов служит подвижное в осевом направлении шлицевое соединение.
13. Педальный привод по п.8, отличающийся тем, что дополнительные ведущие шкивы установлены на скрепленной с рычагом подвижной оси.
14. Педальный привод по п.8, отличающийся тем, что дополнительные ведущие шкивы установлены по меньшей мере на одной закрепленной в корпусе неподвижной оси.
15. Педальный привод, включающий педаль, закрепленную шарнирно с возможностью поворотов на заданный угол в перпендикулярной педали продольной плоскости, и трансмиссию, кинематически связывающую педаль с исполнительными органами устройства и включающую механизм с гибкой связью и механизмы свободного хода,
отличающийся тем, что все подвижные опорные шкивы размещены на общей подвижной оси вращения, соединенной с педалью посредством, например, рычага, присоединенного к педали вблизи оси ее крепления и расположенного в пространстве между исполнительными органами устройства;
неподвижные опорные шкивы размещены группами на общих осях, например осях исполнительных органов;
а ведущими шкивами осей исполнительных органов служат сами эти оси, для чего каждая из них связана гибкими элементами через опорные шкивы и, возможно, дополнительные ведущие шкивы с подвижным рычагом и соединена отдельным механизмом свободного хода с каждым из установленных на ней исполнительных органов.
16. Педальный привод по п.15, отличающийся тем, что механизмы свободного хода размещены в ступицах исполнительных органов.
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ ОТМОРОЖЕНИЙ КОНЕЧНОСТЕЙ | 2006 |
|
RU2334494C2 |
| US 3399906 A, 03.09.1968 | |||
| US 5310202 A, 10.05.1994. | |||

