Изобретение относится к области спасения подводников и может быть использовано для перехода подводников из отсеков аварийной подводной лодки (пл), лежащей на грунте, в другую пл "сухим" способом по трубопроводу, состоящему из гибких гофрированных и жестких секций, устанавливаемому с помощью робота-манипулятора между комингс-площадками аварийной и спасающей пл.
К известному ряду способов спасения экипажей аварийных пл в настоящее время относятся:
1. Способ спасения подводников из аварийной пл, лежащей на грунте, "сухим" способом с помощью всплывающей спасательной камеры (КСВ) (см. ПВ ПЛ-87, Воениздат, Москва 1987 г.), заключающийся в переходе подводников из отсека аварийной пл в КСВ, отделении КСВ со спасающимися от аварийной пл и всплытии на поверхность воды.
Недостатками способа являются:
- сложность стыковки КСВ с декомпрессионным отсеком спасательного судна (СС).
- возможность подъема КСВ на борт СС маловероятна в процессе спасательной операции;
- возможность спасения из-подо льда связана с большими техническими сложностями.
2. Способ спасения подводников из аварийной пл, лежащей на грунте, "сухим" способом с помощью спасательного глубоководного аппарата (СГА) (см. ПВ ПЛ-87, Воениздат, Москва 1987 г.), заключающийся в переводе группы спасаемых подводников (около 20 человек) в СГА, пристыкованный к комингс-площадке аварийной пл, и всплытии СГА со спасаемыми на поверхность.
Недостатками способа являются:
- ограничение использования СГА по балльности моря (до 4 баллов);
- продолжительность работы СГА зависит от энергетического ресурса аккумуляторных батарей, рассчитанных на 10-часовую нагрузку;
- стыковка СГА при крене (дифференте) аварийной пл более 45 градусов практически невозможна без дополнительных сложных технических решений;
- относительно небольшая вместимость СГА (не более 20 человек).
3. Способ спасения с использованием специальной аварийно-спасательной пл пр. 940 типа "Ленок".
Недостатками способа являются:
- необходимость одевания спасаемых подводников в специальные гидрокомбинезоны для последующего компрессирования и перевода их «мокрым» способом с участием водолазов-спасателей в декомпрессионную камеру спасательной пл;
- существенна вероятность переохлаждения спасаемых подводников.
4. Способ спасения из-подо льда с использованием резинотканевого рукава с соединительными фланцами, заключающийся в установке рукава через майну в толще льда на комингс-площадку приледненной пл, для перевода подводников на поверхность льда (Зарегистрирован в Государственном реестре СССР 4 мая 1987 г. Авторское свидетельство №253270);
Недостатками способа являются:
- невозможность его применения на глубине более 20 метров и невозможность спасения подводников из отсеков с повышенным давлением.
Наиболее близким по сути к предлагаемому способу спасения является способ спасения подводников из аварийной пл, лежащей на грунте, "сухим" способом по гибкому гофрированному транспортному трубопроводу (ГГТТ) под давлением в декомпрессионную камеру на судно-спасатель, предложенный в 40-м ГосНИИ МО РФ (Уведомление о положительном результате формальной экспертизы №844 от 21 мая 2000 г.). ГГТТ устанавливается между комингс-площадкой аварийной пл и приемно-выходным отсеком декомпрессионного модуля судна-спасателя, спасающиеся подводники проходят компрессию в спасательном люке аварийной пл и перемещаются посредством подъемника в декомпрессионную камеру на судне-спасателе.
Основные недостатки этого способа следующие:
- необходимость наличия судна-спасателя многоцелевого назначения типа "Регалия";
- невозможность применения при волнении моря более 5 баллов;
- не обеспечивается скрытности спасения.
Задачей предлагаемого изобретения является совершенствование, повышение эффективности существующей системы спасения затонувших аварийных пл.
Задача решается тем, что предлагаемом способе спасения подводников из отсека-убежища аварийной пл, лежащей на грунте, по гибкому трубопроводу под давлением, перемещают спасаемых подводников внутри трубопровода с помощью лебедки в отсек-убежище спасающей пл с последующей, при необходимости, декомпрессией спасаемых подводников. В роли спасающей используется другая пл, оборудованная переносным спасательным комплексом. Гибкий трубопровод, состоящий из гибких гофрированных и жестких секций, устанавливается между комингс-площадками аварийной и спасающей пл с использованием робота-манипулятора. После вытеснения забортной воды из трубопровода воздухом высокого давления, в нем создают давление равное давлению в отсеке-убежище аварийной пл.
Другое отличие состоит в том, что спасение подводников осуществляют последовательно, без шлюзования, через шахту спасательного люка отсека-убежища аварийной пл до полного вывода из отсека-убежища всего экипажа.
Предложение данного способа исходит из следующих соображений:
1). Практически каждая из действующих боевых пл может нести специальное оборудование для оказания помощи другим пл, если при этом не требуется внесения каких-то более-менее сложных конструктивных решений для транспортирования такого оборудования.
2). Оказание помощи экипажам затонувших и лежащих на грунте на глубинах более 100 м аварийных пл наиболее эффективно может быть осуществлено именно пл, которые для этого могли бы лечь на грунт (все дизельные пл) или, став на якорь (для атомных пл), могли зафиксировать свое положение по отношению к аварийной. Максимально возможная глубина спасения предлагаемым способом будет ограничена предельной глубиной для используемой пл (˜400÷600 м).
3). Залегание на грунте рядом с аварийной пл более предпочтительно с точки зрения фиксации относительно аварийной пл, для ряда проектов атомных пл эти проблемы решены.
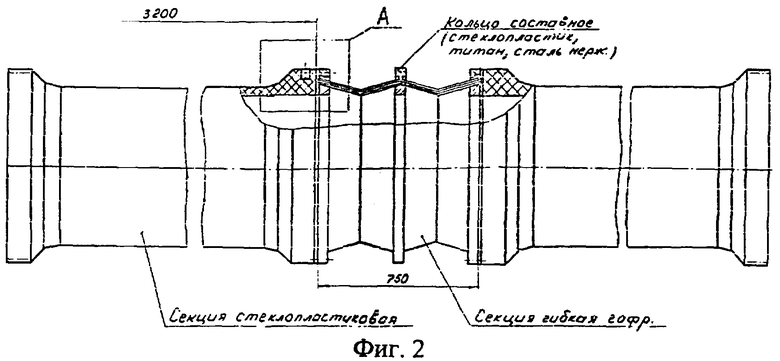
4). В качестве основных средств, которыми необходимо дооборудовать спасающую пл, как уже было указано, могут быть особой прочности гибкий трубопровод, а также специальный робот-манипулятор для установки трубопровода между спасательными люками аварийной и спасающей пл. Схема операции спасения представлена на Фиг.1, (1) - аварийная пл; (2) - спасающая пл; (3) - гибкий трубопровод; (4) - робот-манипулятор; (5) - спасательные люки пл.
6). В настоящее время отработаны технологии создания высокопрочных композиционных материалов с заданной прочностью на основе полимеров, эпоксидных смол с наполнителями типа кевлара, тварона, угольных нитей и др., из которых можно изготовить трубопровод, выдерживающий внутреннее и внешнее статическое давление в 1,5-2 МПа, что уже является интересным с точки зрения реализации способа. Изготовление из таких материалов гибкого трубопровода, армированного металлами, может повысить прочностные характеристики трубопровода в два и более раз. Схема трубопровода представлена на Фиг.2.
7). В настоящее время в парке робототехники есть робот-манипулятор, который может выполнить задачу по установке трубопровода между пл-пл, открытию люка аварийной пл, а также по установлению связи между пл-пл. Схема робота-манипулятора представлена на Фиг.3. Транспортировка такого робота-манипулятора может быть выполнена в контейнере, который может быть закреплен за кормовым спасательным люком спасающей пл, и может быть отброшен при прибытии в район залегания аварийной пл.
8). Вопросы стыковки трубопровода с люками пл технически решены с помощью стыковочных узлов, аналогичных применяемым в космической технике, но доработанные для условий морской среды.
9). Обеспечение приемлемых условий спасения экипажей с точки зрения глубоководной физиологии вполне осуществимо на данном уровне развития водолазной физиологии.
10). Важнейшими свойствами предлагаемого способа спасения является независимость процесса спасения от погодных условий и небольшая зависимость от подводных течений, возможность спасения из-подо льда, обеспечение скрытности процесса спасения, что в условиях боевых действий может сыграть определяющую роль.
11). С выгодной стороны данный способ отличается тем, что в принципе не требует использования водолазов-глубоководников.
12). Разработка, изготовление и внедрение оборудования переносного спасательного комплекса для обеспечения данного способа спасения, взятие его на вооружение в ВМФ намного бы увеличило радиус возможного спасения экипажей. С учетом того, что переносной спасательный комплекс может быть доставлен практически в любую точку мирового океана с помощью транспортной авиации, и, в перспективе, может быть установленным на любую пл, вероятный радиус спасения может стать ограниченным.
Шагающий робот-манипулятор представляет новое поколение робото-технических систем. Роль корневого шарнира выполняется концевыми блоками поочередно. В манипуляторе реализована принципиально новая структура универсальной системы управления: модульная, мультиконтроллерная с сетевой открытой структурой. Система управления распределена в шарниры манипулятора и практически интегрирована с его механикой и электроприводами, базирующимися на бесколлекторных двигателях типа ДБМ. Распределительная система управления манипулятором связана с управляющей ЭВМ верхнего уровня, которая интегрируется в бортовую сеть управления орбитальной станции, корабля, судна и т.п.
Предлагаемый авторами способ спасения является более радикальным и сложным в реализации, чем известные другие, однако первичный анализ реальности его применения в недалекой перспективе дает обнадеживающие результаты.
Реальные возможности изготовления транспортировочного трубопровода подтверждены в ОАО ЦНИИСМ (г.Хотьково Сергиево-Посадского р-на, Московской обл.), где была выполнена предварительная конструктивно-технологическая проработка трубопровода.
Проведение при необходимости декомпрессии спасаемых будет производиться в отсеке-убежище спасающей пл и не представляет существенной проблемы, поскольку предусмотрено дооборудование отсеков-убежищ пл от 3-го поколения и последующих для целей декомпрессии.
Таким образом, выполненная предварительная проработка позволяет сделать вывод о реальности предложенного способа спасения экипажа аварийной подводной лодки, лежащей на грунте.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ эвакуации экипажа аварийной подводной лодки из всплывшей спасательной камеры и устройство для его осуществления | 2020 |
|
RU2756949C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЭВАКУАЦИИ ЭКИПАЖА АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ ИЗ ВСПЛЫВШЕЙ СПАСАТЕЛЬНОЙ КАМЕРЫ | 2014 |
|
RU2557684C1 |
| ПОДВОДНЫЙ СПАСАТЕЛЬНЫЙ КОМПЛЕКС | 2008 |
|
RU2360828C1 |
| КАМЕРА СПАСАТЕЛЬНАЯ ВСПЛЫВАЮЩАЯ | 2011 |
|
RU2479463C1 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 1999 |
|
RU2170191C2 |
| СПАСАТЕЛЬНЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2779404C1 |
| СЪЕМНОЕ ДЕКОМПРЕССИОННОЕ УСТРОЙСТВО ДЛЯ АВАРИЙНО-СПАСАТЕЛЬНОГО КОМПЛЕКСА | 1999 |
|
RU2173282C2 |
| СПОСОБ СПАСАНИЯ ПОДВОДНИКОВ ИЗ ОТСЕКОВ АВАРИЙНОЙ ПОДВОДНОЙ ЛОДКИ | 2022 |
|
RU2797933C1 |
| КАМЕРА СПАСАТЕЛЬНАЯ ВСПЛЫВАЮЩАЯ | 2004 |
|
RU2280586C2 |
| КАМЕРА СПАСАТЕЛЬНАЯ ВСПЛЫВАЮЩАЯ | 2012 |
|
RU2528072C2 |

Способ спасения подводников из отсека-убежища аварийной подводной лодки, лежащей на грунте, по гибкому трубопроводу под давлением включает в себя перемещение спасаемых подводников внутри трубопровода с помощью лебедки в отсек убежище спасающей подводной лодки с последующей, при необходимости, декомпрессией спасаемых подводников. При этом гибкий трубопровод устанавливают между комингс-площадками аварийной и спасающей подводных лодок с использованием робота-манипулятора. После вытеснения забортной воды из трубопровода в нем создают давление, равное давлению в отсеке-убежище аварийной подводной лодки, а перемещение подводников осуществляют последовательно, без шлюзования, через шахту спасательного люка отсека-убежища аварийной подводной лодки до полного вывода из этого отсека-убежища всего экипажа. Такое осуществление способа позволит ускорить процесс спасения экипажа аварийной подводной лодки. 3 ил.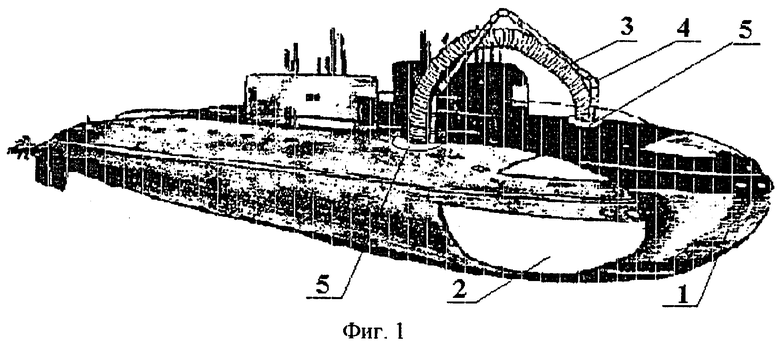
Способ спасения подводников из отсека-убежища аварийной подводной лодки, лежащей на грунте, по гибкому трубопроводу под давлением, включающий перемещение спасаемых подводников внутри трубопровода с помощью лебедки в отсек-убежище спасающей подводной лодки с последующей, при необходимости, декомпрессией спасаемых подводников, отличающийся тем, что гибкий трубопровод устанавливают между комингс-площадками аварийной и спасающей подводных лодок с использованием робота-манипулятора, после вытеснения забортной воды из трубопровода в нем создают давление, равное давлению в отсеке-убежище аварийной подводной лодки, а перемещение подводников осуществляют последовательно, без шлюзования, через шахту спасательного люка отсека-убежища аварийной подводной лодки до полного вывода из этого отсека-убежища всего экипажа.
| Способ получения изделий из керамического порошка | 1990 |
|
SU1814642A3 |
| Роторно-поршневой двигатель Журилова В. | 1990 |
|
SU1814689A3 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ ПОДВОДНОГО АППАРАТА | 1996 |
|
RU2157776C2 |
| УСТРОЙСТВО ДЛЯ ВЫВОДА ЛЮДЕЙ ИЗ ОБЪЕКТА ЧЕРЕЗ ЛЮК, НАХОДЯЩИЙСЯ ПОД ВОДОЙ | 1993 |
|
RU2072941C1 |

