Изобретение относится к области гироскопических устройств и может быть применено в других областях, например в области электрических машин, где необходимо обеспечить вращение сферического ротора вокруг оси, расположенной в произвольном положении в пространстве.
Известны различные конструкции гиромоторов шаровых гироскопов [1, стр.16-19]. Они отличаются сильной взаимосвязью между статором и ротором, в результате чего после разгона главная ось инерции (ГОИ) ротора устанавливается по оси вращения поля статора.
Недостатком известных гиромоторов является то, что они не обеспечивают вращение ферромагнитного ротора вокруг оси, произвольно расположенной в пространстве. Для установки оси вращения ротора и, соответственно, вектора кинетического момента (ВКМ) гироскопа в заданное направление гироскоп помещают в карданов подвес [2]. Разворотом колец карданова подвеса устанавливают ось статора в заданное направление, после чего включают гиромотор. Для изменения ориентации ВКМ ротора в гироскоп устанавливают двухкоординатный датчик угла прецессии ротора и двухкоординатный датчик момента [2], а кардановы кольца оснащают гироскопическими следящими системами, способными автоматически разворачивать корпус гироскопа по сигналам датчика угла прецессии ротора и по управляющим сигналам датчика момента в любом направлении в пространстве [2]. При подаче тока в обмотки датчика момента ротор гироскопа прецессирует (ВКМ ротора поворачивается) в заданном направлении, датчик угла измеряет рассогласование между статором и ротором, а гироскопические следящие системы разворачивают корпус гироскопа до устранения рассогласования. Процесс длится до тех пор, пока ВКМ ротора не займет новое положение в пространстве.
Известны трехосные гиромоторы гироскопов с электрическим подвесом ротора [3]. Они обеспечивают вращение ротора вокруг оси, расположенной в различных направлениях в пространстве.
Однако в таких гиромоторах на статоре и в роторе отсутствуют ферромагнитные материалы, между статором и ротором существенно ослаблено взаимодействие, в результате чего КПД таких гиромоторов составляет 1-2%. В требуемое положение в пространстве приходится устанавливать ГОИ невращающегося ротора, что сопряжено с необходимостью создания специальных двухкоординатных датчиков угла и момента.
Наиболее близким к предлагаемому является гиромотор гироскопа, описанный в [1, стр. 17, рис.7], который мы выбираем в качестве прототипа.
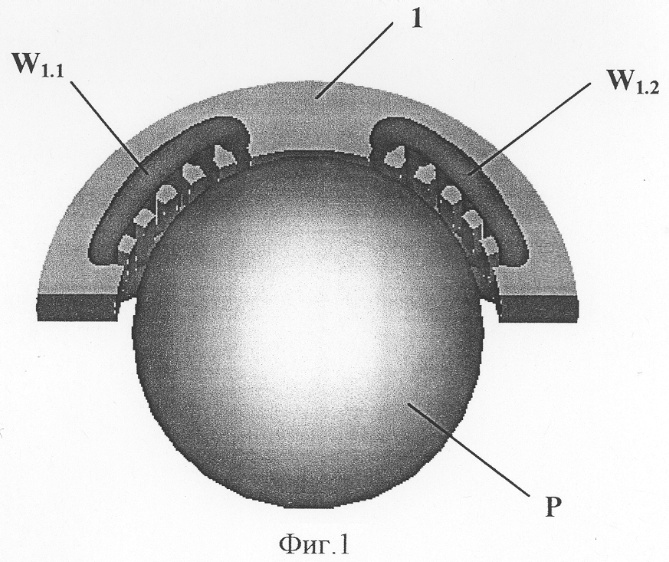
Гиромотор-прототип (фиг.1) содержит дуговой ферромагнитный статор 1 и ферромагнитный ротор Р, находящийся, например, в газовом подвесе. Статор установлен с зазором в диаметральной плоскости ротора Р таким образом, что центр дуги статора совпадает с центром подвеса ротора. Статор 1 содержит двухфазную обмотку: W1.1 - обмотка первой фазы, W1.2 - обмотка второй фазы. Оси обмоток W1.1 и W1.2 расположены на статоре 1 под углом 90°. Для приведения ротора во вращение на обмотки так же, как в асинхронном двигателе, подаются два напряжения U1 и U2, сдвинутые по фазе на 90 электрических градусов.
Достоинством гиромотора-прототипа является то, что он обеспечивает вращение ротора с гораздо большей эффективностью, чем гиромотор в [3]. КПД в зависимости от требуемой скорости вращения достигает 20%.
Недостатком гиромотора-прототипа является то, что вращение ротора может осуществляться только вокруг одной оси, совпадающей с осью статора.
Целью предлагаемого изобретения является создание гиромотора, обеспечивающего эффективный разгон и вращение ротора в любом направлении в пространстве.
Поставленная цель в предлагаемом гиромоторе решена благодаря тому, что, во-первых, в гиромотор-прототип введены дополнительно пять таких же, как и первый, дуговых статоров, которые установлены вместе с первым и аналогично ему попарно в каждой из трех взаимно-ортогональных плоскостей так, что дуговые статоры, расположенные в одной плоскости, соединены между собой в кольцевые статора (КС) через спинки статоров, лежащих в ортогональной плоскости, а диаметрально противоположные обмотки каждого кольцевого статора объединены в обмотки первой и второй фазы.
Во-вторых, благодаря тому, что в гиромотор введены три фазорегулятора, усилители мощности и генератор напряжения частоты возбуждения, подключенный к обмоткам первой фазы через усилитель мощности, а к обмоткам второй фазы каждого кольцевого статора - через отдельные фазорегулятор и усилитель мощности.
В-третьих, благодаря тому, что в предлагаемом гиромоторе фазовый сдвиг фазорегулятора кольцевого статора равен (90°-θ), где θ - заданный пространственный угол между ВКМ ротора и осью этого кольцевого статора.
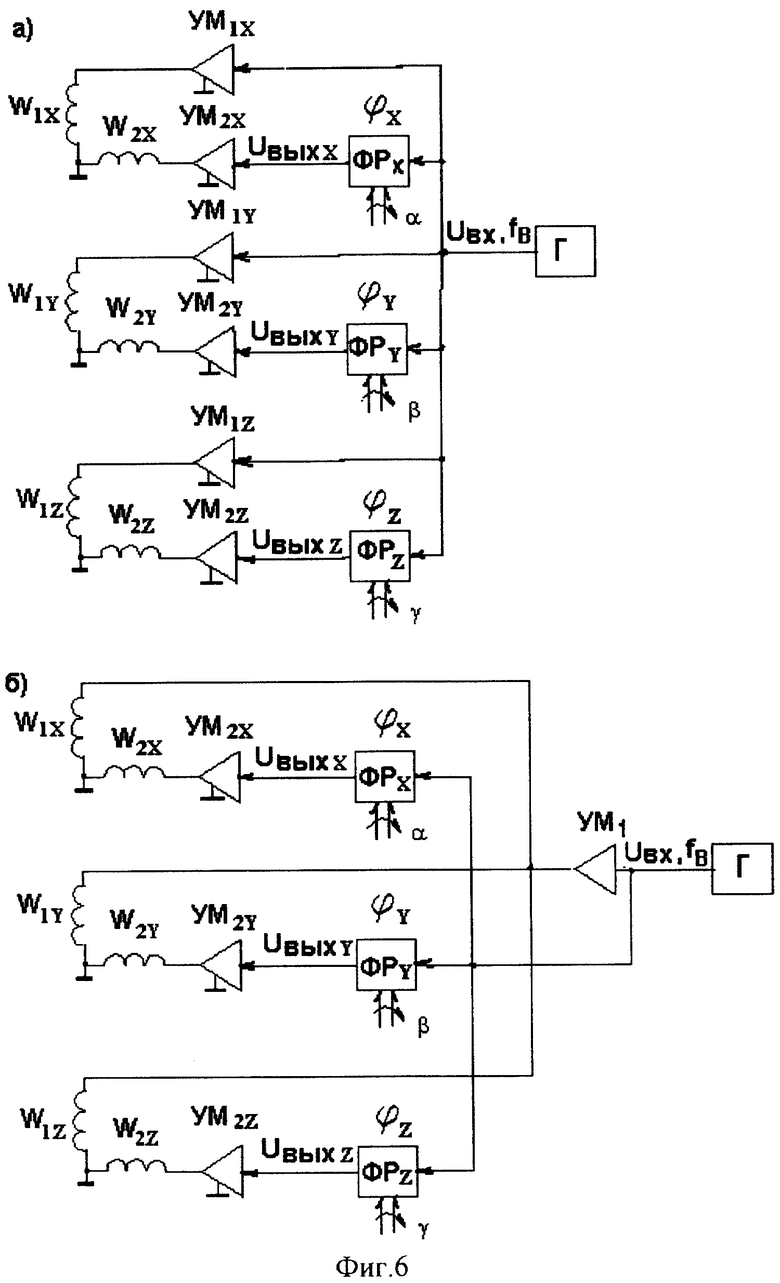
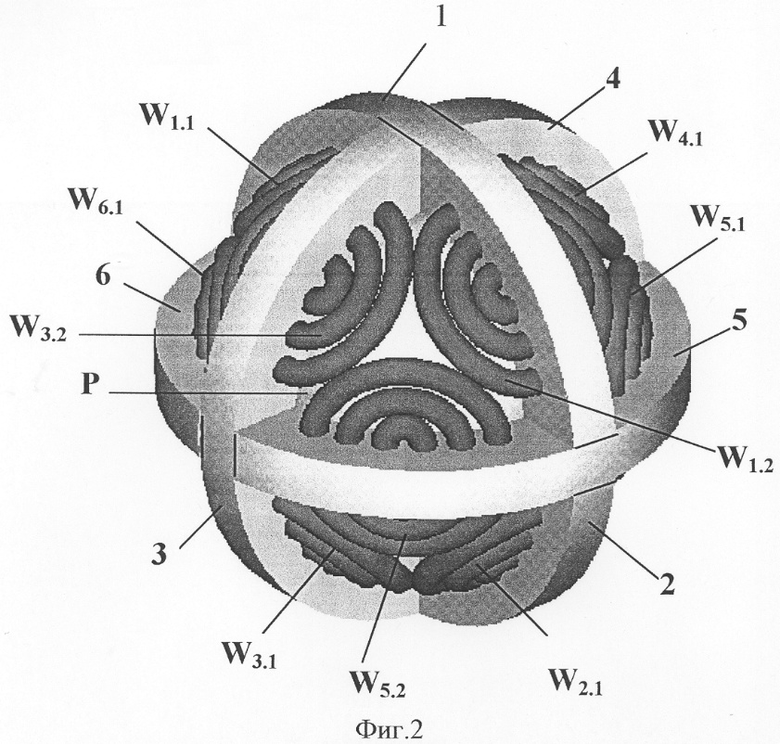
Сущность предлагаемого изобретения поясняется фиг.1-6. На фиг.1 изображен гиромотор-прототип с дуговым статором; на фиг.2 - предлагаемый гиромотор; на фиг.3 - кольцевые статоры: КСX - (а), КСY - (б) и КСZ - (в). На фиг.4 показана схема соединения обмоток кольцевого статора КСX: а) последовательная, б) параллельная. На фиг.5 изображена векторная диаграмма вращающих моментов гиромотора. На фиг.6 - схема подключения генератора, усилителей мощности и фазорегуляторов к обмоткам кольцевых статоров: а) с различными усилителями мощности первой фазы, б) с одним усилителем мощности.
На фиг.1-6 приняты следующие обозначения:
1, 2, 3, 4, 5, 6 - дуговые статоры;
W1.1, W2.1, W3.1, W4.1, W5.1, W6.1 - обмотки первой фазы дуговых статоров 1...6;
W1.2, W2.2, W3.2, W4.2., W5.2, W6.2 - обмотки второй фазы дуговых статоров 1...6;
Р - ротор;
0ХУZ - система координат;
W1Х, W1Y, W1Z - обмотки первой фазы кольцевых статоров КСX, КСY и КСZ;
W2X, W2Y, W2Z - обмотки второй фазы кольцевых статоров КСX, КСY и КСZ;
Г - генератор напряжения возбуждения;
УМ1X, УМ1Y, УМ1Z - усилители мощности первой фазы кольцевых статоров КСX, КСY и КСZ;
УМ1 - усилитель мощности первой фазы всех кольцевых статоров;
УМ2X, УМ2Y, УМ2Z - усилители мощности второй фазы кольцевых статоров КСX, КСY и КСZ;
ФРX, ФРY, ФРZ - фазорегуляторы кольцевых статоров КСX, КСY и КСZ;
U1, U2 - напряжения первой и второй фазы;
d, q - продольная и поперечная оси кольцевого статора;
fв - частота напряжения возбуждения;
ϕ - фазовый сдвиг;
Uвх - напряжение на входах фазорегуляторов;
Uвых Х, Uвых Y, Uвых Z - напряжения на выходах фазорегуляторов соответственно ФРX, ФРY, ФРZ;
Мвр - вращающий момент гиромотора;
Н - вектор кинетического момента, ВКМ;
α, β, γ - углы между осями координат X, Y, Z и вращающим моментом гиромотора Мвр, а также углы поворота фазорегуляторов соответственно ФРX, ФРY и ФРZ;
МX МY, МZ - вращающие моменты кольцевых статоров, проекции момента Мвр на оси X, Y и Z.
Устройство гиромотора-прототипа (фиг.1) было описано выше. В отличие от прототипа предлагаемый гиромотор (фиг.2) содержит шесть дуговых статоров 1, 2, 3, 4, 5, 6, расположенных попарно в трех взаимно ортогональных плоскостях концентрично центру подвеса ротора. В каждой плоскости (фиг.3) дуговые статоры соединены в кольцевые через спинки двух других статоров, расположенных в ортогональной плоскости.
В связи с тем, что в предлагаемом гиромоторе магнитные потоки проходят в дуговых статорах в продольном и поперечном направлениях, статоры выполнены из изотропного материала с близкой магнитной проводимостью в ортогональных направлениях, например из феррита.
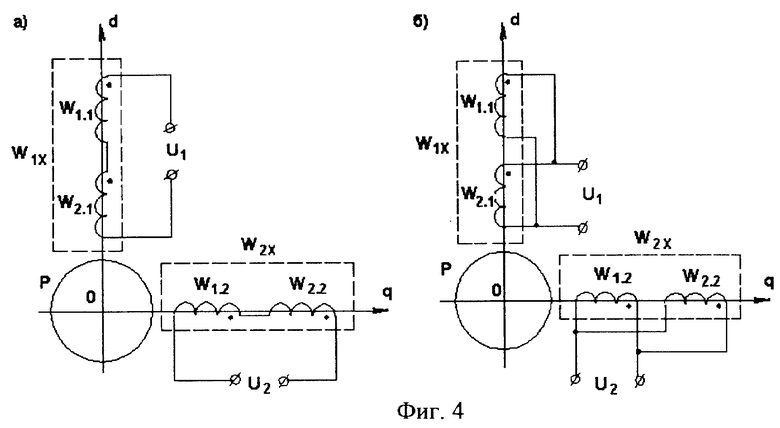
Диаметрально-противоположные обмотки каждого кольцевого статора, например в КСX - это W11, W2.1 и W1.2, W2.2, объединены (последовательно фиг.4,а или параллельно фиг.4,б) в обмотки соответственно первой W1X и второй W2X фазы, на которые подаются электрические напряжения U1 и U2. На фиг.4 показано, что ось d кольцевого статора совпадает с осью обмотки первой фазы, а ось q - с осью обмотки второй фазы.
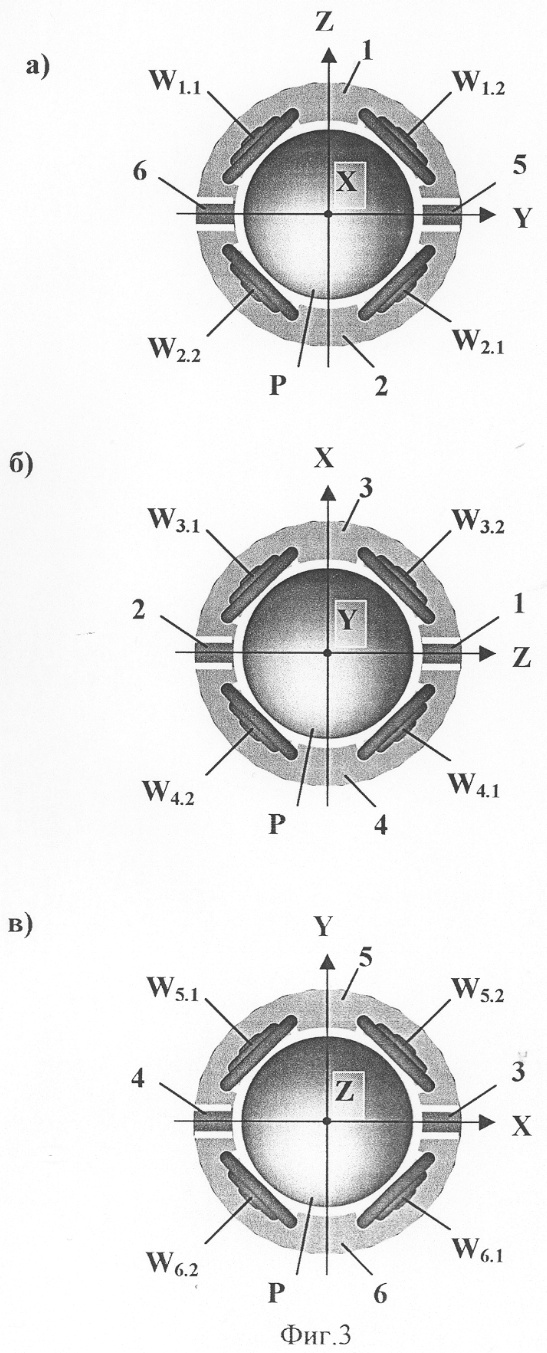
На фиг.3,а в соответствии с фиг.2 показано соединение дуговых статоров 1 и 2 через спинки статоров 5 и 6 в кольцевой статор КСX. Этот статор создает вращающий момент МX, направленный по оси X. Обмотки W1.1 и W2.1, а также обмотки W1.2 и W2.2 объединены (фиг.4) в обмотки первой W1X и второй W2X фазы.
На фиг.3,б показано, что дуговые статоры 3 и 4 (фиг.2) соединены через спинки статоров 1 и 2 в кольцевой статор КСY, создающий вращающий момент МY по оси Y. Обмотки W3.1 и W4.1, а также обмотки W3.2 и W4.2 объединены (фиг.4) в обмотки первой W1Y и второй W2Y фазы.
На фиг.3,в изображен кольцевой статор КСZ, состоящий из дуговых статоров 5 и 6 (фиг.2), соединенных между собой через спинки статоров 3 и 4. В статоре создается вращающий момент МZ, направленный по оси Z. Обмотки W5.1 и W6.1, также обмотки W5.2 и W6.2 объединены (фиг.4) в нем в обмотки первой W1Z и второй W2Z фазы.
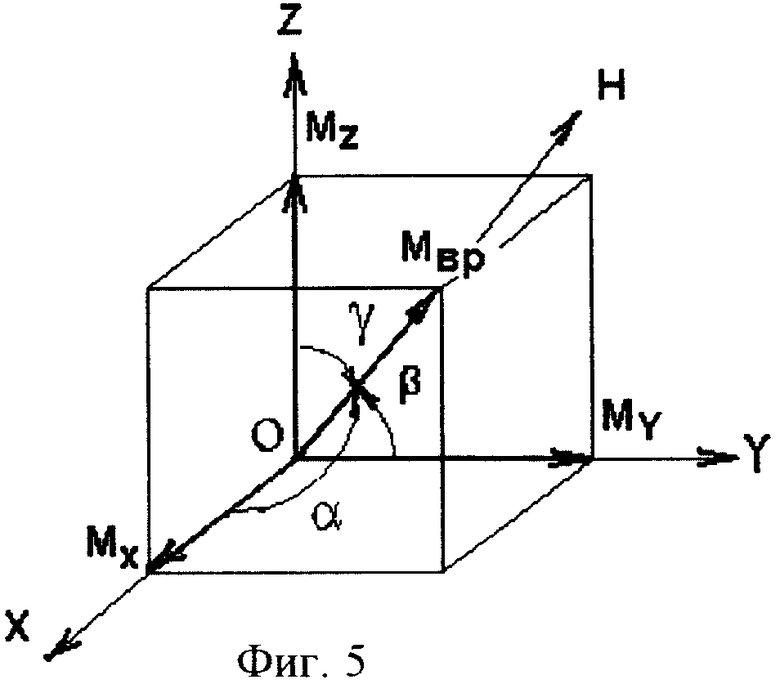
Работа предлагаемого гиромотора по п.1 Формулы основана на том, что результирующий вращающий момент Мвр гиромотора, совпадающий по направлению в установившемся режиме с его ВКМ, создается каждым кольцевым статором по проекциям МX, МY, МZ вектора Мвр на соответствующие оси X, Y и Z (фиг.5), относительно которых он расположен под углами α, β и γ:
Известно [4], что вращающий момент М в каждом кольцевом статоре, как и в асинхронном двигателе, определяется из соотношения

где U1 и U2 - напряжения одинаковой частоты, подаваемые на обмотки первой W1 и второй W2 фазы (фиг.4) кольцевого статора,
ϕ - электрический фазовый сдвиг между этими напряжениями,
k - коэффициент пропорциональности.
Отсюда следует, что вращающий момент статора достигает максимального значения при ϕ=90°. Управление величиной вращающего момента при постоянной частоте может осуществляться изменением величины напряжений U1 и U2 или изменением фазового сдвига ϕ между ними.
Таким образом, формированием требуемой величины вращающего момента в каждом кольцевом статоре в соответствии с п.1 Формулы можно расположить ВКМ ротора в любом направлении в пространстве.
Кроме вышесказанного, в предлагаемом гиромоторе обеспечивается постоянство моментов, приложенных к ротору. Для этого в соответствии с п.2 Формулы необходимо генератор Г частоты возбуждения подключить к обмоткам первой фазы каждого статора через усилитель мощности, а к обмоткам второй фазы - через отдельные фазорегулятор и усилитель мощности.
Сказанное поясняется фиг.6,а, на которой генератор Г соединен с обмоткой первой фазы W1X кольцевого статора КСX через усилитель мощности УМ1X, с обмоткой W1Y кольцевого статора КСY - через усилитель мощности УM1Y, с обмоткой W1Z кольцевого статора КСZ - через усилитель мощности УМ1Z. С обмоткой второй фазы W2X статора КСX генератор Г соединен через фазорегулятор ФРX и усилитель мощности УМ2X, с обмоткой W2Y статора КСY - через фазорегулятор ФРY и усилитель мощности УМ2Y, а с обмоткой W2Z статора КСZ - через фазорегулятор ФРZ и усилитель мощности УМ2Z.
Не противоречит п.2 Формулы другая схема подключения генератора Г к обмоткам первой фазы, изображенная на фиг.6,б. Здесь генератор Г подключен к обмоткам W1X, W1Y и W1Z через один усилитель УМ1, выходная увеличенная мощность которого достаточна для нормальной работы всех обмоток первой фазы кольцевых статоров.
Работа предлагаемого гиромотора по п.2 Формулы основана на том, что напряжения U1 и U2 в каждом кольцевом статоре остаются постоянными, а изменение величины вращающего момента осуществляется фазовращателем ФРX, ФРY или ФРZ соответствующего кольцевого статора по соотношению (2).
В результате, при любом направлении в пространстве ВКМ ротора сохраняются постоянными моменты тяжения, приложенные к ротору и влияющие на его уходы.
Выполнение гиромотора в соответствии с пп.1 и 2 позволяет реализовать еще одну его особенность, существенно облегчающую выставку ВКМ ротора в заданное направление.
Действительно, для каждого кольцевого статора на основании (2) можно записать
где ϕX, ϕY, ϕZ - фазовые сдвиги между напряжениями Uвых Х, Uвых Y и Uвых Z на выходах фазорегуляторов соответственно ФРX, ФРY и ФРZ (фиг.6) и напряжением Uвх на их входах. В этом случае из (1) и (3) следует

Если принять Мвр=k·U1·U2, то из (4) получим
Откуда
Таким образом, в соответствии с п.3 Формулы для выставки ВКМ ротора предлагаемого гиромотора в заданное направление в пространстве необходимо и достаточно обеспечить, чтобы фазовый сдвиг между электрическими напряжениями обмоток кольцевого статора (фиг.6), т.е. фазовый сдвиг фазорегуляторов, был равен углу (90°-θ), где θ - угол между вектором вращающего момента Мвр гиромотора и осью соответствующего кольцевого статора. Для статора КСX (фиг.5), создающего вращающий момент МX по оси X, θ=α, для статора КСY с моментом МY - θ=β, для статора КСZ с моментом МZ - θ=γ.
Если используются электронные фазорегуляторы, то соответствующий фазовый сдвиг можно создавать программно при вводе заданных углов в пространстве. Если в качестве фазорегулятора используются электромеханические фазовращатели, то всегда можно обеспечить, чтобы при установке углов α, β и γ фазовые сдвиги ϕX, ϕY и ϕZ фазорегуляторов ФРX, ФРY и ФРZ соответствовали (6). В результате существенно упрощаются вычисления, необходимые для определения величин вращающих моментов по осям и для задания требуемого направления в пространстве ВКМ ротора.
Таким образом, в предлагаемом гиромоторе достигнута поставленная цель и в соответствии с п.1 Формулы обеспечено расположение ВКМ ферромагнитного ротора в любом направлении в пространстве при повышенной эффективности вращения. Кроме того, с помощью фазовращателей в предлагаемом гиромоторе (п.2 Формулы) обеспечено постоянство моментов тяжения при любой ориентации ВКМ ротора, а также (в соответствии с п.3 Формулы) упрощена выставка ВКМ ротора в любое направление в пространстве, заданное углами α, β и γ в координатой системе ОХУZ, образованной осями кольцевых статоров.
Источники информации
1. Шульман Г.Е. Шаровые гироскопы. - Л.: Судостроение, 1970. – 94 с.
2. Бесекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. - Л.: Судостроение, 1968. – 351 с.
3. Воскобойников Р.Л., Иванова Н.С., Колпаков А.И., Максимов М.Г. Управление движением главной оси инерции ротора свободного гироскопа. //Гироскопия и навигация, №4(27), 1999, с.10-22.
4. Юферов Ф.М. Электрические машины автоматических устройств. - М.: Высшая школа, 1976. – 416 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХОСНЫЙ ГИРОМОТОР | 2004 |
|
RU2275601C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| УНИВЕРСАЛЬНЫЙ НЕКОНТАКТНЫЙ ГИРОСКОП | 2013 |
|
RU2521765C1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
Изобретение относится к гироскопическим устройствам и может быть применено в областях техники для обеспечения вращения ротора вокруг оси, расположенной в произвольном положении в пространстве. В гиромотор, содержащий дуговой статор и ферромагнитный ротор, дополнительно введены пять таких же дуговых статоров, которые установлены вместе с первым и аналогично ему попарно в каждой из трех взаимно ортогональных плоскостей так, что дуговые статоры, расположенные в одной плоскости, соединены между собой в кольцевые через спинки статоров, лежащих в ортогональной плоскости, а обмотки каждого кольцевого статора объединены в обмотки первой и второй фазы. Кроме того, в устройство введены три фазорегулятора, усилители мощности и генератор напряжения частоты возбуждения, подключенный к обмоткам первой фазы каждого кольцевого статора через усилитель мощности, а к обмоткам второй фазы каждого кольцевого статора - через отдельные фазорегулятор и усилитель мощности, а фазовый сдвиг между электрическими напряжениями на выходе и входе кольцевого статора равен 90°-θ, где θ - требуемый (заданный) пространственный угол между вектором кинетического момента ротора гиромотора и осью этого кольцевого статора. Техническим результатом является обеспечение эффективного разгона и вращения ротора в любом направлении в пространстве. 2 з.п. ф-лы, 6 ил.
| ШУЛЬМАН Г.Е | |||
| Шаровые гироскопы | |||
| - Л.: Судостроение | |||
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА | 1998 |
|
RU2154257C2 |
| US 5476018 А, 19.12.1995 | |||
| US 4297905 А, 03.11.1981. | |||

