Область техники
Изобретение относится к области точного приборостроения и может быть использовано в различных устройствах ориентации подвижных объектов, в частности при производстве надежных малогабаритных гироскопов-акселерометров для приборов подземной навигации - инклинометров.
Предшествующий уровень техники
Известны неконтактные гироскопы - газовые, электростатические и электромагнитные, в которых сферический ротор удерживается давлением газового слоя или силами управляемого электрического или магнитного поля в центре камеры с поддерживающими элементами: электродами, электромагнитами. Для разгона и поддержания вращения ротора в традиционных неконтактных гироскопах используются двухфазные статоры, вращающееся магнитное поле которых взаимодействует с проводящей поверхностью ротора электростатического гироскопа (http://mexman.ru/ «Гироскоп с электростатическим подвесом», рис.1, [1]) или с проводящим пояском ферритового ротора (патент РФ №2126135 «Магнитосферический гироскоп»). Для начальной выставки вектора кинетического момента (ВКМ) и управления движением ротора используются специальные обмотки нивелирования [1], датчики углового положения ротора и датчики момента (при использовании гироскопа в режиме ДУС-датчика угловой скорости, патент РФ №2064163 «Гироскоп-акселерометр со сферическим ферромагнитным ротором в магниторезонансном подвесе»). Все это приводит к значительному усложнению конструкции и снижению надежности гироскопов.
Существенным недостатком неконтактных гироскопов является необходимость поддержания постоянства величины ВКМ. Например, в электростатических гироскопах это требует поддержания чрезвычайно высокого и стабильного вакуума в герметичной камере с ротором. Но при использовании динамического дебаланса ротора для простого (вместо оптического) способа определения положения ВКМ степень торможения ротора определяется уже не остаточным газом, а рассеянием энергии вращательного движения ротора силами демпфирования неконтактного подвеса. В электромагнитных гироскопах величина ВКМ поддерживается постоянной в условиях вакуума при непрерывной работе статора вращения (ввиду более существенного - по сравнению с электростатическим подвесом - торможения ротора в магнитном поле). Приложение к ротору момента вращения Mвр обусловливает величину так называемой «гироскопической постоянной времени» Tгир, которую можно определить как примерное время совмещения ВКМ с величиной Н с вектором Mвр при рассогласовании этих векторов на угол 1 радиан,

Так, для гироскопов с газовой опорой ротора, эта постоянная составляет единицы секунд, для электромагнитных гироскопов без вакуумирования - несколько минут. Таким образом, торможение ротора, например, из-за остаточного газа в герметичном корпусе существенно снижает точность неконтактных гироскопов. В то же время поддержание высокого и стабильного вакуума приводит к необходимости введения в конструкцию гироскопа и состав обслуживающей электроники специальных вакуумных микронасосов с высоковольтными блоками их питания.
Принципиально устранить уход ВКМ ротора гироскопа при рассогласовании с вектором момента статора вращения возможно, если применить пространственную систему из трех статоров вращения, суммарный вектор вращения которых автоматически совпадает с ВКМ. Такое решение представлено в патенте РФ №2275601 «Трехосный гиромотор», где сферический ротор, расположенный в газовой опоре, окружен тремя кольцевыми статорами вращения, на каждой силовой обмотке которых построен автогенератор магнитного потока. В описании патента утверждается, что при этом ВКМ ротора сохраняет свое положение при любых углах поворота корпуса со статорами. Недостатком такого технического решения является сложность конструкции электронных блоков управления и невысокая точность совмещения вектора вращающего момента с ВКМ ввиду погрешностей построения автогенераторов относительно очень малой гироскопической постоянной гироскопа в газовой опоре.
В патенте РФ №2065134 на изобретение «Способ определения положения вектора кинетического момента неконтактного гироскопа» описывается конструкция неконтактного гироскопа (показан на фиг.1 описания к патенту РФ №2065134), в котором сферический ротор окружен поддерживающими элементами (электродами, электромагнитами), укрепленными на корпусе и подключенными к электронному блоку управления подвесом ротора в электрическом или магнитном поле. Полый ротор с традиционным сплющенным эллипсоидом инерции (благодаря утолщению стенок в области экватора) выполнен с динамическим дебалансом (ввиду нанесения на одну сторону ротора пленки из более плотного материала). Это позволило упростить блок определения положения ВКМ ротора, вырабатывающий направляющие косинусы ВКМ в виде сигналов постоянного напряжения (с нулевой частотой несущей). Гироскоп, описанный в патенте РФ №2065134, принимается за прототип предлагаемого изобретения. Недостатком такого неконтактного гироскопа является сложность конструкции, обусловленная наличием ряда вспомогательных элементов, типичных для известных (традиционных) неконтактных гироскопов (отдельного статора вращения, обмоток для начальной выставки ВКМ, датчиков момента для использования гироскопа в режиме датчика угловой скорости и т.п.). Кроме этого, ротор со сплющенным эллипсоидом инерции требует точной статической балансировки. Главный недостаток прототипа - влияние момента, поддерживающего заданную скорость вращения ротора, на точность гироскопа.
Сущность изобретения
Задача изобретения заключается в упрощении неконтактного вакуумированного гироскопа со сферическим ротором и придании ему универсальности, заключающейся в использовании для подвеса ротора одновременно или раздельно электрического и магнитного полей. Оптимальный состав конструкции и электронных блоков определяется по отношению к поставленной задаче применения универсального гироскопа на объекте (погрешность, перегрузочная способность, время готовности, режим работы - свободный гироскоп или датчик угловой скорости). При этом допускается пониженная степень разрежения газа в герметичной камере вместо стабильного высокого вакуума, требующего постоянной работы встроенных микронасосов с блоками их питания.
Поставленная задача решается тем, что в неконтактном гироскопе, содержащем сферический ротор в корпусе с тремя парами ортогонально расположенных поддерживающих элементов, электронный блок управления подвесом ротора и блок определения положения вектора кинетического момента ротора, каждый поддерживающий элемент выполнен в виде двухфазного статора вращения с основной и управляющей обмотками на зубцовом магнитопроводе. Магнитопроводы могут быть изолированы от корпуса и применены в качестве измерительных и (или) поддерживающих емкостных электродов. В то же время, магнитопроводы с основными обмотками могут быть использованы как поддерживающие и (или) измеряющие смещение ротора электромагниты. Сферический ротор предложенного универсального гироскопа может быть выполнен с вытянутым эллипсоидом инерции, либо благодаря помещению в тело массивного ротора цилиндрического стержня из материала с плотностью выше плотности материала ротора, либо благодаря соединению двух половин полого ротора цилиндрическим стержнем из материала ротора. Главное новое качество предложенного гироскопа - устранение влияния положения вектора приложенного к ротору вращающего момента на положение в пространстве ВКМ - достигнуто благодаря тому, что выходы блока определения положения вектора кинетического момента ротора соединены через усилительно-преобразовательные устройства с управляющими обмотками статоров вращения.
Перечень фигур и чертежей.
На фиг.1 представлен основной вид конструкции предложенного универсального неконтактного гироскопа с тремя парами поддерживающих элементов.
На фиг.2 показана конструкция поддерживающего элемента.
На фиг.3 представлено устройство монолитного сферического ротора с вытянутым эллипсоидом инерции и заданным (для определения положения ВКМ) динамическим дебалансом.
На фиг.4 приведена конструкция полого ротора с вытянутым эллипсоидом инерции.
Фиг.5 иллюстрирует образование общего электрода - ограничителя на корпусе гироскопа.
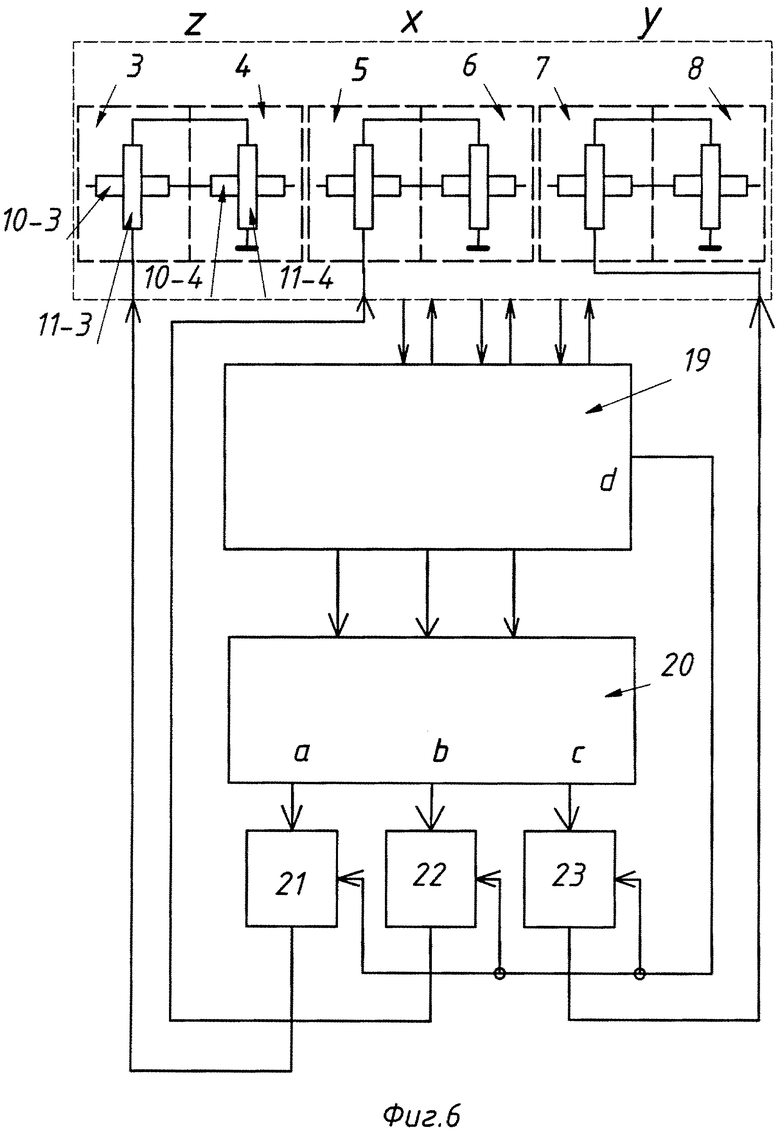
На фиг.6 приведена блок-схема соединений блока определения положения ВКМ с управляющими обмотками статоров вращения поддерживающих элементов.
На фиг.7 показана блок-схема варианта построения неконтактного подвеса с одновременным использованием электродов и электромагнитов.
На фиг.8 представлено образование вектора вращающего момента М, совпадающего по направлению с ВКМ ротора Н.
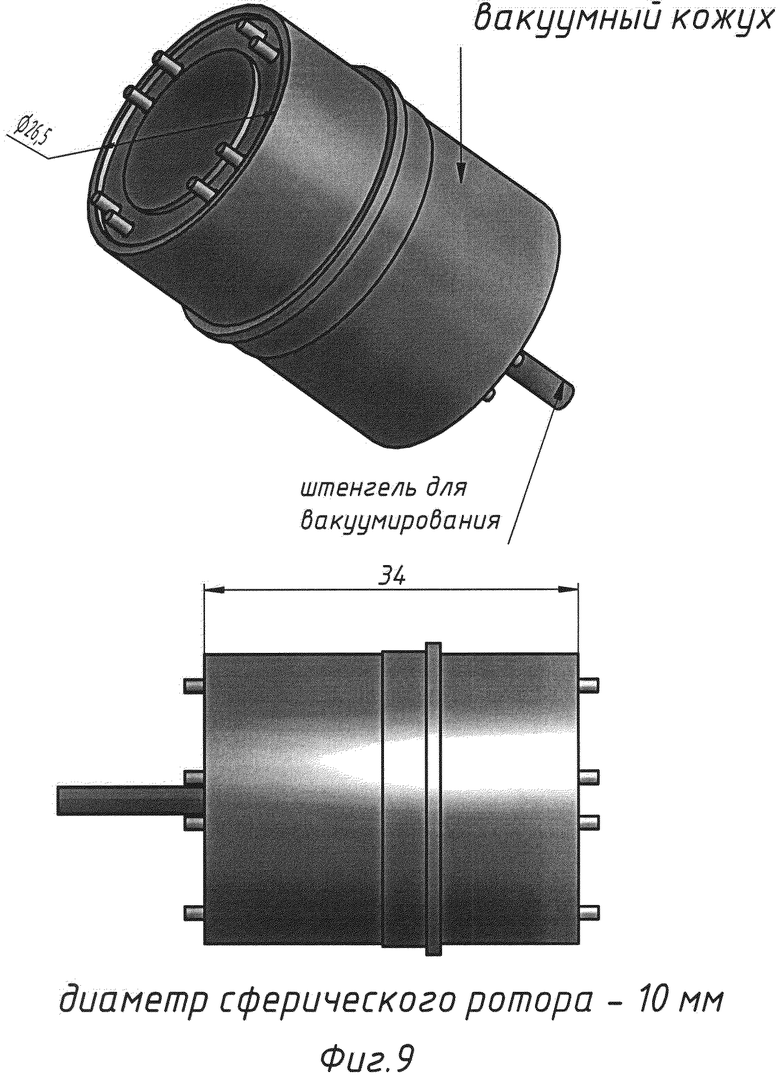
На фиг.9 приведен габаритный вид предложенного гироскопа в вакуумном кожухе.
На фиг.1-9 приняты следующие обозначения:
1 - корпус гироскопа,
1а - первая половина корпуса,
1б - вторая половина корпуса,
2 - сферический ротор,
3, 4 - поддерживающие элементы по оси Z,
5, 6 - поддерживающие элементы по оси X,
7, 8 - поддерживающие элементы по оси Y,
9 - зубцовый магнитопровод,
10а - первая половина основной обмотки,
10б - вторая половина основной обмотки,
10 - основная обмотка, образованная, например, последовательным соединением половин 10а и 106,
11a - первая половина управляющей обмотки,
11б - вторая половина управляющей обмотки,
11 - управляющая обмотка, образованная соединением половин 11а и 11б,
12 - изолирующее кольцо,
13 - массивный сферический ротор,
14 - стержень из плотного материала,
15 - заглушка,
16 - первая половина полого сферического ротора,
17 - вторая половина полого сферического ротора,
18а - первая половина цилиндрического стержня с резьбовым выступом,
18б - вторая половина цилиндрического стержня с резьбовой впадиной,
19 - блок управления подвесом ротора,
20 - блок определения положения вектора кинетического момента,
21 - усилительно-преобразовательное устройство по оси Z,
22 - усилительно-преобразовательное устройство по оси X,
23 - усилительно-преобразовательное устройство по оси Y,
24 - источник высокочастотного напряжения,
25 - источник низкочастотного опорного напряжения,
26 - источник инвертированного низкочастотного опорного напряжения,
27 - устройство определения положения ротора по оси Z,
28 - устройство определения положения ротора по оси Х,
29 - устройство определения положения ротора по оси Y,
30 - ПИД-регулятор по оси Z,
31 - ПИД-регулятор по оси X,
32 - ПИД-регулятор по оси Y.
33 - фазосдвигающее устройство.
Предложенный универсальный неконтактный гироскоп содержит (фиг.1) корпус 1, составленный из первой половины 1а и второй - 1б, скрепленных между собой, например, с помощью резьбовых элементов (на чертеже не показаны). Сферический ротор 2 окружен закрепленными на корпусе тремя парами ортогонально расположенных (по осям Z, X, Y) поддерживающих элементов - соответственно 3-4, 5-6 и 7-8. Каждый поддерживающий элемент, например 3 на фиг.2, выполнен в виде двухфазного статора вращения, содержащего четырехзубцовый магнитопровод 9 с основной обмоткой, составленной из двух соединенных последовательно половин 10а и 10б, и с управляющей обмоткой, составленной также из двух последовательно соединенных половин 11а и 11б. Если корпус гироскопа сделан из электропроводящего материала, то крепление на нем поддерживающих элементов выполнено через изолирующее кольцо 12, как показано на фиг.2 для поддерживающего элемента 3. В состав неконтактного гироскопа, осуществляющего подвес ротора в электрическом и (или) магнитном поле, входят традиционные электронный блок управления подвесом ротора (19 на фиг.6) и блок определения положения вектора кинетического момента ротора (20 на фиг.6). Магнитопровод 9 (фиг.2), изолированный от корпуса кольцом 12, может быть применен в качестве измерительного (определяющего смещение ротора) или силового (создающего центрирующую силу) емкостного электрода (образующего емкость относительно проводящей или диэлектрической поверхности ротора), а также может быть одновременно использован как измерительный и силовой электроды при построении традиционных пассивных и активных электростатических подвесов проводящих роторов. Магнитопровод 9 с основной обмоткой 10а и 10б образует также электромагнит, который может быть использован при построении электромагнитного подвеса ротора в качестве поддерживающего силового и (или) измерительного при определении смещения ротора. В предложенном универсальном неконтактном гироскопе возможно как одновременное использование электростатического и электромагнитного подвесов ротора (например, изготовленного из магнитодиэлектрика - феррита с проводящей пленкой на поверхности), так и смешанное использование поддерживающих элементов, например магнитопроводов-электродов, как измеряющих положение ротора, а электромагнитов с основными обмотками - как создающих силовое центрирующее магнитное поле.
В предложенном гироскопе наряду с традиционными сферическими роторами со сплющенным эллипсоидом инерции (один максимальный - совпадающий с осью вращения - момент инерции и множество минимальных моментов инерции, перпендикулярных оси вращения) предлагается использовать роторы с вытянутым эллипсоидом инерции (один момент инерции минимальный и множество максимальных моментов инерции, расположенных в плоскости, на которой расположена ось вращения ротора). Такая классификация роторов гироскопов приведена в книге: К. Магнус. Гироскоп. Теория и применение/ Пер. с немецкого. - М.: Мир, 1974. С.27-32. На фиг.3 массивный сферический ротор 13 выполнен с вытянутым эллипсоидом инерции благодаря тому, что в тело ротора помещен цилиндрический стержень 14 из материала с плотностью выше плотности материала ротора. Стержень 14 установлен ассиметрично (смещен по оси Y) для придания ему динамического дебаланса, необходимого для определения положения ВКМ по способу, описанному в прототипе. Заглушка 15 выполнена из материала ротора и фиксирует стержень 14 при сохранении сферической поверхности ротора.
На фиг.4 ротор с вытянутым эллипсоидом инерции выполнен полым из двух половин 16-17, которые соединены между собой цилиндрическим стержнем из материала ротора. Стержень состоит из двух частей: первая половина 18а - с резьбовым выступом, и вторая половина 18б - с резьбовой впадиной. Резьбовое соединение выполнено с образованием полости во второй половине стержня 18б для задания динамического дебаланса.
Половины корпуса гироскопа 1а и 1б (фиг.1) обработаны внутри с помощью эталонного шара-притира по сферической поверхности, показанной на фиг.5, образующей общий электрод-ограничитель, который образует по отношению к ротору емкость для подвода высокочастотного напряжения питания электродов (магнитопроводов) и ограничивает смещение ротора, предотвращая его касание электродов с высоковольтными управляющими напряжениями электростатического подвеса. (Номинальный зазор «ротор - общий электрод» выполнен меньше номинального рабочего зазора «ротор-электроды»),
В состав гироскопа входят (как в прототипе) электронный блок 19 (фиг.6) управления подвесом ротора (в электрическом, магнитном или одновременно в обоих полях) и блок 20 определения положения вектора кинетического момента (ВКМ) ротора по сигналам биения вращающегося несбалансированного ротора. Блок 20 вырабатывает направляющие косинусы ВКМ Н (фиг.8) в виде сигналов постоянного напряжения (с нулевой частотой несущей) в виде:

k1 - передаточный коэффициент.
Эти сигналы с помощью соответствующих усилительно-преобразовательных блоков 21, 22, и 23 переводятся на несущую с частотой питающего напряжения основных обмоток статоров вращения и сдвигом по фазе на π/2 (например, для обмоток 10-3 и 10-4 поддерживающих элементов 3, 4) при использовании устройств умножения (модуляторов) и усилителей. Выходы блоков 21, 22, 23 подключены к соответствующим управляющим обмоткам статоров вращения (например, по оси Z к последовательно соединенным обмоткам 11-3 и 11-4 поддерживающих элементов 3 и 4).
Вариант построения неконтактного подвеса с одновременным использованием электродов и электромагнитов представлен на фиг.7. Источник высокочастотного напряжения 24 подключен к общему электроду-ограничителю. Магнитопроводы поддерживающих элементов (например, 9 для элемента 3) использованы как измерительные емкости и подключены к соответствующим устройствам определения положения (смещения) ротора 2: устройство определения положения ротора 27 - по оси Z, устройство 28 - по оси Х и устройство 29 - по оси Y. Источник низкочастотного опорного напряжения 25 и источник инвертированного низкочастотного опорного напряжения 26 подключены к основным обмоткам статоров вращения диаметрально противоположно расположенных поддерживающих элементов (например, к обмоткам 10-3 и 10-4 элементов 3 и 4). К общим точкам соединения этих обмоток подключены выходы ПИД-регуляторов: 30 - по оси Z, 31 - по оси Х и 32 - по оси Y. Входы ПИД-регуляторов соединены с выходами соответствующих устройств определения положения ротора 27-29.
К выходу источника 26 подключено также фазосдвигающее устройство 33, выход d которого связан с усилительно-преобразовательными элементами 21-23 блок-схемы (фиг.6).
Взаимодействие узлов предложенного гироскопа происходит следующим образом. При смещении ротора 2 (фиг.1, фиг.7), например, по оси Z, емкость «магнитопровод 9 - ротор» поддерживающего элемента 3 уменьшается, а емкость «магнитопровод-ротор» поддерживающего элемента 4 - увеличивается. Разница токов через емкости от высокочастотного источника напряжения 24 определяется устройством 27 определения положения ротора по оси Z (например, в виде дифференциального трансформатора), преобразуется на несущую частоту источника 25 и подается на ПИД-регулятор 30, который усиливает входной сигнал и вырабатывает напряжение, пропорциональное скорости смещения ротора (для придания ротору динамической устойчивости). Выходное напряжение ПИД-регулятора 30 суммируется на обмотке 10-3 с напряжением источника 25 (электромагнит элемента 3) и вычитается из инвертированного напряжения источника 26 на обмотке 10-4 (противоположный электромагнит элемента 4). В результате со стороны элемента 3 возникает сила, удерживающая ротор в центральном положении. Аналогично работают силовые электромагниты поддерживающих элементов 5 и 6 по оси X и элементов 7 и 8 по оси Y.
Работа поддерживающих элементов как статоров вращения основана на том, что при подаче напряжений одинаковой частоты и сдвинутых по отношению друг к другу по фазе на π/2 на ортогональные основную и управляющую обмотки возникает вращающий момент Mi:

где Uо - напряжение на основной обмотке (например, для оси Z - на обмотках 10-3 и 10-4 поддерживающих элементов 3 и 4),
Uу - напряжение на управляющей обмотке (например, для оси Z - на обмотках 11-3 и 11-4 поддерживающих элементов 3 и 4),
k2 - передаточный коэффициент.
(Необходимо отметить, что регулирование величины вращающего момента статоров предложенного гироскопа может осуществляться также при изменении фазового сдвига между одинаковыми по величине напряжениями на основной и управляющей обмотках).
При подаче максимального управляющего напряжения Uу производят разгон ротора (например, относительно оси Z) до частоты вращения выше резонансной частоты электромагнитного подвеса ротора, после чего динамически несбалансированный ротор создает сигналы биения с частотой вращения, которые, как описано в прототипе, преобразуются блоками 19 и 20 (фиг.6) в напряжения, пропорциональные направляющим косинусам a, b, c (2) ВКМ ротора. Затем подают управляющие напряжения на все статоры вращения. При этом моменты вращения, прикладываемые к ротору относительно ортогональных осей Z, X, Y, будут равны (фиг.8):

В этом случае, как показано на фиг.8, суммарный вектор вращающего ротор момента М будет всегда совпадать по направлению с вектором кинетического момента Н при поворотах корпуса предложенного гироскопа на любые углы относительно осей Z, X, Y, т.е. предложенный неконтактный гироскоп обладает свойствами свободного гироскопа даже при ограниченном времени выбега ротора, например, из-за торможения об остатки газа в вакуумном кожухе. Отметим, что определение положения ВКМ ротора может производиться другими простыми способами, например, при использовании роторов с интегрально сферической поверхностью (Артюхов Е.А., Гусинский В.З. Роторы гироскопов с интегрально сферической поверхностью// Механика твердого тела (МТТ), 1995, №1), когда определение положения ВКМ производится по биениям ротора с асферизованной формой поверхности (заявка РФ №94005696 на изобретение «Ротор неконтактного гироскопа», заявка РФ №94007371 на изобретение «Асферизованный ротор неконтактного гироскопа»). В этом случае положение ВКМ определяется в неограниченном диапазоне углов поворота корпуса гироскопа и во всем диапазоне скоростей вращения ротора.
В предложенном гироскопе наряду с широко известными сферическими роторами со сплюснутым эллипсоидом инерции рекомендуется использовать описанные выше (фиг.3 и фиг.4) роторы с вытянутым эллипсоидом инерции. В этом случае отпадает необходимость в точной статической балансировке ротора, так как вращение ротора происходит относительно оси одного из минимальных моментов инерции с величиной несколько больше величины остальных минимальных моментов инерции из-за, например, погрешности изготовления ротора.
Предложенный универсальный гироскоп может использоваться в режиме датчика угловой скорости (ДУС), когда вращающие статоры поддерживающих элементов 3 и 4 по оси Z (фиг.1) создают момент, обеспечивающий заданную скорость вращения ротора, а вращающие статоры элементов 5-6 и 7-8 используются как датчики момента по осям X и Y для приведения ВКМ ротора к оси Z. По величине управляющих напряжений этих датчиков судят о составляющих угловой скорости поворота корпуса гироскопа относительно осей X и Y.
Предложенный универсальный гироскоп может использоваться также как трехкомпонентный акселерометр для определения линейных ускорений по осям Z, X, Y. Величины этих ускорений пропорциональны выходным напряжениям соответствующих устройств определения положения ротора 27, 28 и 29 (фиг.7).
Предложенный гироскоп предполагается выполнять малогабаритным (фиг.9) с диаметром ротора менее 10 мм при использовании, например, в подземной навигации, в частности при определении траекторий буровых скважин. При этом малый размер ротора (особенно при полой конструкции) обусловливает высокую перегрузочную способность гироскопа (до 100g), необходимую при работе в забойном инклинометре.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2015 |
|
RU2579156C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ГИРОСКОП | 2015 |
|
RU2589939C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| СОВМЕЩЕННЫЙ ДАТЧИК МОМЕНТА И СМЕЩЕНИЯ ТЕЛА | 1998 |
|
RU2209393C2 |
| НЕКОНТАКТНЫЙ ПОДВЕС РОТОРА | 2013 |
|
RU2545310C2 |
| БЕСПОДШИПНИКОВАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2014 |
|
RU2562448C1 |
| ТРЕХОСНЫЙ ГИРОМОТОР | 2004 |
|
RU2275601C1 |
| БЕСПОДШИПНИКОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2017 |
|
RU2652792C1 |


Изобретение относится к области точного приборостроения и может быть использовано в различных устройствах ориентации подвижных объектов, в частности при производстве надежных малогабаритных гироскопов-акселерометров для приборов подземной навигации - инклинометров. Гироскоп содержит сферический ротор в корпусе с тремя парами ортогонально расположенных поддерживающих элементов, электронный блок управления подвесом ротора и блок определения положения вектора кинетического момента ротора. Каждый поддерживающий элемент выполнен в виде двухфазного статора вращения с основной и управляющей обмотками на зубцовом магнитопроводе. Магнитопроводы изолированы от корпуса и применены в качестве измерительных и (или) поддерживающих емкостных электродов, а магнитопроводы с основными обмотками использованы как поддерживающие и (или) измерительные электромагниты. Динамически несбалансированный ротор выполнен с вытянутым эллипсоидом инерции. Выходы блока определения положения вектора кинетического момента ротора (по сигналам биения несбалансированного ротора) соединены через усилительно-преобразовательные устройства с управляющими обмотками статоров вращения, что позволило придать предложенному гироскопу свойства свободного гироскопа при ограниченном времени выбега ротора, обусловленном, например, трением ротора об остатки газа в вакуумированном кожухе. Предложенный универсальный гироскоп может использоваться также в режиме датчика угловой скорости (ДУС) и как трехкомпонентный акселерометр. Гироскоп отличается простотой конструкции, его предполагается выполнять малогабаритным, с диаметром ротора менее 10 мм, для использования, например, в подземной навигации, в частности при определении траекторий буровых скважин. При этом малый размер ротора (особенно при полой конструкции) обусловливает высокую перегрузочную способность гироскопа (до 100g), необходимую при работе в забойном инклинометре. 5 з.п. ф-лы, 9 ил.
1. Универсальный неконтактный гироскоп, содержащий сферический ротор в корпусе с тремя парами ортогонально расположенных поддерживающих элементов, электронный блок управления подвесом ротора и блок определения положения вектора кинетического момента ротора, отличающийся тем, что каждый поддерживающий элемент выполнен в виде двухфазного статора вращения с основной и управляющей обмотками на зубцовом магнитопроводе.
2. Универсальный неконтактный гироскоп по п.1, отличающийся тем, что магнитопроводы изолированы от корпуса и применены в качестве измерительных и (или) поддерживающих емкостных электродов.
3. Универсальный неконтактный гироскоп по п.1, отличающийся тем, что магнитопроводы с основными обмотками использованы как поддерживающие и (или) измерительные электромагниты.
4. Универсальный неконтактный гироскоп по п.1, отличающийся тем, что ротор выполнен с вытянутым эллипсоидом инерции благодаря помещению в тело массивного ротора цилиндрического стержня из материала с плотностью выше плотности материала ротора.
5. Универсальный неконтактный гироскоп по п.1, отличающийся тем, что ротор выполнен полым с вытянутым эллипсоидом инерции из двух половин, соединенных между собой цилиндрическим стержнем из материала ротора.
6. Универсальный неконтактный гироскоп по п.1, отличающийся тем, что выходы блока определения положения вектора кинетического момента ротора соединены через усилительно-преобразовательные устройства с управляющими обмотками статоров вращения.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| МАГНИТОСФЕРИЧЕСКИЙ ГИРОСКОП | 1997 |
|
RU2126135C1 |
| УСТРОЙСТВО ПОДВЕСА ФЕРРОМАГНИТНОГО СФЕРИЧЕСКОГО РОТОРА | 1996 |
|
RU2156441C2 |
| RU 2064163 C1 20.07.1996 | |||
| US 3498144 A1 03.03.1970 | |||
| US 20030019309 A1 30.01.2003 | |||

