Область техники, к которой относится изобретение
Изобретение относится к области швейного машиностроения и может быть использовано для перемещения материала в вышивальных автоматах и полуавтоматах, а также в вышивальных приставках швейных машин.
Уровень техники
Основной целью создания новых устройств для перемещения материала является повышение производительности вышивальных машин при сохранении их мощности и качества вышивки. Указанная цель не может быть достигнута путем повышения скорости перемещения материала без усовершенствования конструкции известных устройств, так как при этом резко возрастают динамические нагрузки, возникающие при возвратно-поступательном движении вышивальной рамки в старт-стопном режиме работы, в результате чего увеличиваются силы инерции в элементах конструкции и уровень вибрации, что отрицательно влияет на точность позиционирования материала, а следовательно, и на качество вышивки.
Известно устройство для перемещения материала (Рекламная информация фирмы Toyota // Eurostitch Magazine. - 1999. - April. - №36. - р.2), содержащее расположенные взаимно перпендикулярно подвижную направляющую с рабочей кареткой и две параллельные неподвижные направляющие с транспортными каретками, вышивальную рамку, жестко связанную с рабочей кареткой и управляемые электроприводы кареток с механизмами перемещения и шаговыми электродвигателями. Подвижная направляющая установлена с возможностью перемещения вдоль неподвижных направляющих. Для этого концы подвижной направляющей жестко закреплены на противоположных транспортных каретках. Шаговый электродвигатель рабочей каретки жестко закреплен на подвижной направляющей. Шаговые электродвигатели кареток связаны с системой управления.
Описанная конструкция не позволяет уменьшить возникающие силы инерции и уровень вибрации, обусловленные большой массой подвижной части устройства, снижение которой в данном случае, при жесткой связи подвижных элементов, невозможно. Поэтому она характеризуется недостаточной точностью позиционирования материала, в результате чего, при мощности шаговых электродвигателей равной 100W, может быть достигнута производительность вышивальной машины не более 800 стежков в минуту.
Более того, эта конструкция имеет большой вес (8-12 kG), что связано с высоким уровнем вибрации, при котором возникает необходимость реализации дополнительных мер по повышению ее надежности.
Известны конструктивные решения, которые позволяют уменьшить силы инерции путем снижения подвижной массы за счет размещения шагового электродвигателя рабочей каретки вне подвижной части устройства.
При этом уменьшается и уровень вибрации, а следовательно, обеспечивается возможность снижения веса устройства не менее чем в 3 раза.
Еще одним преимуществом такого технического решения является то, что оно позволяет получить более сбалансированную конструкцию, а следовательно, исключить одну из неподвижных направляющих, то есть упростить устройство и дополнительно снизить его вес.
Более близким к заявляемому по технической сущности и достигаемому результату является устройство для перемещения материала, содержащее расположенные взаимно перпендикулярно подвижную направляющую с рабочей кареткой и две параллельные неподвижные направляющие с транспортными каретками, вышивальную рамку, жестко связанную с рабочей кареткой, и управляемые электроприводы кареток с механизмами перемещения и шаговыми электродвигателями (п. Японии №62-97959, кл. D 03 В 21/00, 1987).
Механизм перемещения рабочей каретки включает прикрепленный к ней гибкий элемент, охватывающий барабан и ролик, каждый из которых связан с соответствующей транспортной кареткой.
Подвижная направляющая, состоящая из двух параллельных прутков, установлена с возможностью перемещения вдоль неподвижных направляющих и относительно шагового электродвигателя рабочей каретки. С этой целью концы прутков попарно жестко закреплены на противоположных транспортных каретках, а барабан, расположенный между проушинами одной из транспортных кареток, установлен на ходовом валу шагового электродвигателя рабочей каретки с возможностью перемещения вдоль его продольной оси и связан с валом посредством шлицевого соединения. Указанный электродвигатель жестко закреплен на неподвижной части устройства.
Величина перемещения подвижной направляющей относительно электродвигателя рабочей каретки выбрана больше длины рабочего поля устройства, например 250-300 mm. Для этого ходовой вал шагового электродвигателя рабочей каретки выполнен в виде шлицевого вала, длина которого выбрана не менее указанной величины.
Шаговые электродвигатели кареток связаны с системой управления.
Описанное конструктивное решение обеспечивает уменьшение сил инерции и уровня вибрации, которые зависят от величины массы подвижной части устройства.
Однако при этом существенно увеличивается длина ходового вала шагового электродвигателя рабочей каретки, а следовательно, снижается его жесткость в поперечном направлении. В результате появляется возможность прогиба вала под действием возникающих сил инерции, что отрицательно влияет на точность позиционирования материала, а следовательно, и на качество вышивки. Кроме того, такой вал имеет большой момент инерции, обусловленный его значительными размерами, что относительно вращательных движений эквивалентно увеличению подвижной массы устройства.
Описанное устройство не позволяет существенно уменьшить влияние сил инерции, так как длина указанного вала выбрана из условия беспрепятственного перемещения подвижной направляющей по всей длине рабочего поля. В итоге, при мощности шаговых электродвигателей, равной 100W, производительность вышивальной машины может быть увеличена не более чем до 1000 стежков в минуту.
Кроме того, шлицевой вал и барабан являются дорогостоящими прецизионными изделиями, которые под действием значительных динамических нагрузок подвержены интенсивному износу. Таким образом, это устройство при низкой износостойкости характеризуется высокой стоимостью.
Сущность изобретения
В основу изобретения поставлена задача усовершенствования устройства для перемещения материала с получением технического результата в виде уменьшения сил инерции в элементах его конструкции, а за счет этого увеличения точности позиционирования материала, что позволит увеличить скорость его перемещения, а следовательно, и производительность вышивальных машин без ухудшения качества вышивки.
Для решения поставленной задачи в известном устройстве для перемещения материала, которое включает расположенные взаимно перпендикулярно подвижную направляющую с рабочей кареткой и по меньшей мере одну неподвижную направляющую с транспортной кареткой, вышивальную рамку, жестко связанную с рабочей кареткой, а также управляемые электроприводы кареток с механизмами перемещения и электродвигателями, при этом подвижная направляющая установлена с возможностью перемещения вдоль неподвижной направляющей и относительно электродвигателя рабочей каретки, согласно изобретению электродвигатель рабочей каретки установлен с возможностью перемещения параллельно неподвижной направляющей и связан с управляемым электроприводом, а абсолютная величина перемещения подвижной направляющей относительно электродвигателя рабочей каретки выбрана больше заданной длины стежка.
Электродвигатель рабочей каретки может быть закреплен на дополнительной каретке, которая установлена на неподвижной направляющей либо дополнительной направляющей. Дополнительная направляющая должна быть установлена параллельно неподвижной направляющей.
Электродвигатель рабочей каретки может быть связан с управляемым электроприводом транспортной каретки с помощью амортизатора. Эта связь может быть реализована путем соединения дополнительной и транспортной кареток через амортизатор.
Во втором варианте реализации электродвигатель рабочей каретки может быть связан с дополнительным управляемым электроприводом.
Причинно-следственная связь между признаками изобретения и ожидаемым техническим результатом обусловлена особенностями работы вышивальных машин.
Процесс вышивки характеризуется сложным движением вышивальной рамки, которое представляет собой векторную сумму двух движений: резкого скачкообразного возвратно-поступательного движения при выполнении стежка и более медленного перемещения в соответствии с контуром рисунка или линией прокладки стежков.
В связи с этим динамические нагрузки, возникающие в процессе работы устройства, представляют собой сумму динамических нагрузок, обусловленных каждым из указанных видов движения. Уровень динамических нагрузок зависит от характера и абсолютного значения величины перемещения подвижной части устройства, ее массы и момента инерции вращающихся частей.
Вся масса подвижной части устройства выполняет резкое скачкообразное движение вдоль неподвижной направляющей, и только часть этой массы, а именно вышивальная рамка и ее каретка, - вдоль подвижной направляющей. Последняя часть указанного движения дальше не рассматривается потому, что динамические нагрузки, которые возникают при этом, - незначительные.
Скачкообразное перемещение зависит от положения иглы вышивальной машины, поэтому оно осуществляется в старт-стопном режиме, который характеризуется периодами остановки, когда иголка находится в ткани, и периодами поступательного движения с резким разгоном и торможением, когда иголка находится вне ткани, и возможностью изменения направления движения на следующем стежке. В этом случае величина перемещения подвижной направляющей определяется длиной стежка, которая, например, в вышивальных машинах ZSK равна 0,1-12,8 mm.
Составляющая движения вышивальной рамки в соответствии с контуром рисунка или линией прокладки стежков осуществляется в пределах рабочего поля устройства путем постепенного перемещения собственно вышивальной рамки вдоль подвижной направляющей с одновременным поступательным перемещением последней вдоль неподвижной направляющей. Эти перемещения не зависят от положения иглы вышивальной машины.
Уровень динамических нагрузок, а следовательно, и сил инерции, возникающих в подвижной части устройства при перемещении по контуру рисунка или линии прокладки стежков, приблизительно на два порядка ниже соответствующих физических величин, характерных для скачкообразного движения вышивальной рамки при выполнении стежков. Таким образом, силы инерции, связанные с движением по контуру рисунка или линии прокладки стежков, не оказывают существенного влияния на точность позиционирования материала.
Благодаря тому что электродвигатель рабочей каретки установлен с возможностью перемещения параллельно неподвижной направляющей, достигается возможность его совместного перемещения с подвижной направляющей, что позволяет уменьшить длину кинематической цепи соответствующего привода, а именно длину вала, который связывает элементы конструкции. В результате увеличивается жесткость упомянутого вала в поперечном направлении, уменьшается его момент инерции и, как следствие, уменьшаются деформация и вибрация, а следовательно, повышается точность позиционирования материала по сравнению с известными устройствами.
При этом, поскольку абсолютная величина перемещения подвижной направляющей относительно электродвигателя рабочей каретки выбрана больше заданной длины стежка, сохраняется возможность скачкообразного возвратно-поступательного перемещения указанной направляющей при выполнении стежков без вовлечения в этот процесс электродвигателя рабочей каретки. Таким образом, совместное перемещение указанных элементов конструкции осуществляется в пределах рабочего поля только при движении вышивальной рамки в соответствии с контуром рисунка или линией прокладки стежков, а следовательно, не приводит к значимому увеличению динамических нагрузок, способных существенно повлиять на точность позиционирования материала при увеличении подвижной массы устройства.
Закрепление электродвигателя рабочей каретки на дополнительной каретке, которая установлена на неподвижной направляющей при простоте конструктивного решения, обеспечивает строго параллельное перемещение подвижных элементов конструкции. При этом достигается возможность упрощения связи подвижной направляющей с валом указанного электродвигателя без увеличения динамических нагрузок. В предложенном конструктивном исполнении эта связь осуществляется посредством поводковой муфты, что позволяет значительно снизить стоимость устройства и повысить его износостойкость. В этом случае длина поводка поводковой муфты, например, при максимальной длине стежка 12,8 mm составляет приблизительно 15 mm, что практически на порядок меньше длины ходового вала электродвигателя рабочей каретки в известном устройстве.
Поскольку движение вышивальной рамки в соответствии с контуром рисунка или линией прокладки стежков, а следовательно, и перемещение электродвигателя рабочей каретки параллельно неподвижной направляющей не зависит от положения иглы вышивальной машины, то для перемещения электродвигателя рабочей каретки может быть использован дополнительный или уже существующий управляемый электропривод.
Более простым является вариант с использованием существующего управляемого электропривода. Он может быть реализован, например, путем соединения дополнительной и транспортной кареток через амортизатор, благодаря которому обеспечивается демпфирование влияния резкого скачкообразного возвратно-поступательного перемещения подвижной направляющей на характер перемещения электродвигателя рабочей каретки. Поскольку абсолютная величина перемещения указанной направляющей выбрана больше заданной длины стежка, обеспечивается ее перемещение на заданную длину стежка в обе стороны от исходного положения без вовлечения в процесс упомянутого электродвигателя.
Несмотря на относительную сложность, более предпочтительным является другой вариант реализации устройства с дополнительным управляемым электроприводом, который позволяет четко отслеживать в соответствии с контуром рисунка или линией прокладки стежков изменение положения подвижной направляющей при перемещении ее в любом направлении, сохраняя минимально возможное расстояние между подвижными элементами конструкции, которое должно быть больше заданной длины стежка. Поскольку абсолютная величина перемещения подвижной направляющей относительно электродвигателя рабочей каретки выбрана больше заданной длины стежка, обеспечивается ее минимально возможная подвижность, необходимая для скачкообразного перемещения на заданную длину стежка без вовлечения в этот процесс электродвигателя рабочей каретки.
В результате оба варианта реализации устройства позволяют уменьшить силы инерции, возникающие в элементах его конструкции, и таким образом повысить точность позиционирования материала, что обеспечивает возможность увеличить производительность вышивальной машины при мощности шаговых электродвигателей, равной 100 W до 1200 стежков в минуту без ухудшения качества вышивки.
Преимуществом первого из описанных вариантов реализации является простота конструктивного исполнения, что существенно при использовании устройства в качестве вышивальной приставки к швейным машинам.
Преимуществом другого варианта реализации является минимальный уровень динамических нагрузок, обусловленных увеличением подвижной массы устройства за счет введения подвижного электродвигателя рабочей каретки. Это достигается благодаря использованию дополнительного управляемого электропривода, который обеспечивает независимое перемещение электродвигателя рабочей каретки, что позволяет полностью исключить влияние характера перемещения подвижной направляющей на характер перемещения указанного электродвигателя. За счет этого может быть реализовано равномерное перемещение упомянутого электродвигателя в соответствии с контуром рисунка или линией прокладки стежков и, таким образом, минимизированы возникающие при этом динамические нагрузки.
Дополнительным преимуществом этого варианта реализации является возможность смены заданной длины стежка во время работы устройства без переналадки его механической части с помощью системы управления.
Перечень фигур
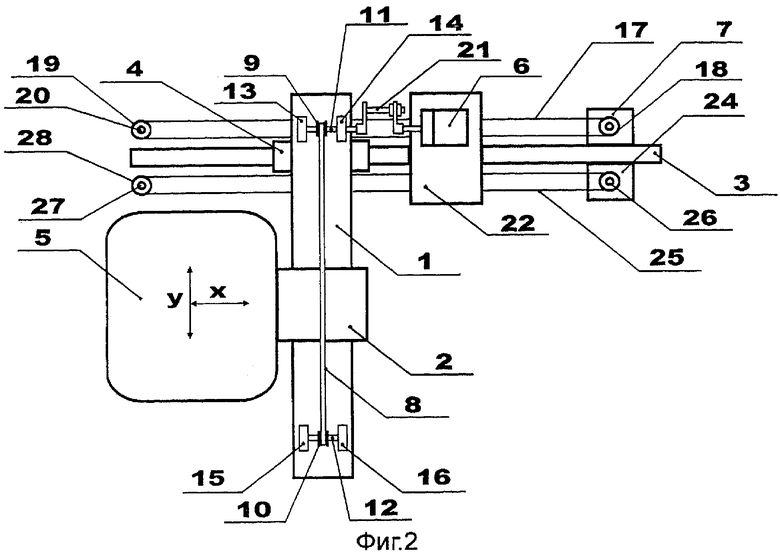
На фиг.1 представлена функциональная схема одного варианта реализации устройства, а на фиг.2 - другого варианта реализации этого же устройства.
Сведения подтверждающие возможность осуществления изобретения
Устройство для перемещения материала содержит (см. фиг.1, 2) расположенные взаимно перпендикулярно подвижную направляющую 1 с рабочей кареткой 2 и неподвижную направляющую 3 с транспортной кареткой 4, вышивальную рамку 5, жестко связанную с рабочей кареткой 2, и управляемые электроприводы кареток 2, 4 с механизмами перемещения и электродвигателями 6, 7.
Механизм перемещения рабочей каретки 2 включает прикрепленный к ней гибкий элемент, например зубчатый ремень 8, охватывающий шкивы 9, 10, которые расположены на ведущем и ведомом валах 11, 12 соответственно. Ведущий вал 11 установлен на опорных стойках 13, 14, а ведомый вал 12 - на опорных стойках 15, 16. Опорные стойки 13, 14 и 15, 16 попарно закреплены на противоположных концах подвижной направляющей 1, имеющей, например, форму рейки.
Механизм перемещения транспортной каретки 4 включает прикрепленный к ней гибкий элемент, например зубчатый ремень 17, охватывающий шкивы 18, 19. Шкив 18 расположен на валу электродвигателя 7 транспортной каретки 4, а шкив 19 - на подвижной стойке 20.
Подвижная направляющая 1 установлена с возможностью перемещения вдоль неподвижной направляющей 3 и относительно электродвигателя 6 рабочей каретки 2. Для этого, например, один конец подвижной направляющей 1 жестко закреплен на транспортной каретке 4, а ведущий вал 11 связан с валом указанного электродвигателя 6 посредством поводковой муфты 21.
Электродвигатель 6 рабочей каретки 2 установлен с возможностью перемещения параллельно неподвижной направляющей 3. С этой целью он закреплен, например, на дополнительной каретке 22, которая установлена на неподвижной направляющей 3.
Кроме того, упомянутый электродвигатель 6 связан с управляемым электроприводом, а величина относительного перемещения подвижной направляющей 1 относительно электродвигателя 6 выбрана больше заданной длины стежка, например максимальной длины стежка, равной 12,8 mm. При этом длина поводка поводковой муфты равна 15 mm.
В одном из приведенных вариантов реализации электродвигатель 6 рабочей каретки 2 связан с управляемым электроприводом транспортной каретки 4 (см. фиг.1). Эта связь выполнена, например, в виде соединения дополнительной каретки 22 с транспортной кареткой 4 через амортизатор, например пружину 23.
В другом из предложенных вариантов реализации электродвигатель 6 рабочей каретки 2 связан с дополнительным управляемым электроприводом (см. фиг.2), который содержит дополнительный электродвигатель 24 и механизм перемещения упомянутого электродвигателя 6.
Указанный механизм перемещения включает гибкий элемент, например зубчатый ремень 25, охватывающий шкивы 26 и 27, причем шкив 26 расположен на валу дополнительного электродвигателя 24, а шкив 27 - на неподвижной стойке 28. Связь электродвигателя 6 рабочей каретки 2 с дополнительным управляемым электроприводом выполнена в виде соединения дополнительной каретки 22 с зубчатым ремнем 25.
Электродвигатели 6, 7 и 24 связаны с системой управления (на фиг.1, 2 не показано).
Предлагаемое изобретение иллюстрируется следующими примерами его работы.
По сигналу системы управления одновременно включаются электродвигатели 6, 7.
От электродвигателя 6 вышивальная рамка 5 получает перемещение по оси У (см. фиг.1, 2). Движение от вала указанного электродвигателя 6 через поводковую муфту 21 передается ведущему валу 11 и далее шкиву 9, а затем через зубчатый ремень 8 рабочей каретке 2, перемещая ее по оси Y вдоль подвижной направляющей 1. Совместно с рабочей кареткой 2 перемещается вышивальная рамка 5. Величина этого перемещения Δlувр равна заданному значению перемещения по оси Y в соответствии с контуром рисунка или линией прокладки стежков Δy, то есть Δlувр=Δy.
От электродвигателя 7 вышивальная рамка 5 получает перемещение по оси Х (см. фиг.1, 2). Движение от вала упомянутого электродвигателя 7 передается шкиву 18, затем через зубчатый ремень 17 транспортной каретке 4, а следовательно, и подвижной направляющей 1, перемещая их по оси Х вдоль неподвижной направляющей 3. Совместно с подвижной направляющей 1 перемещается установленная на ней рабочая каретка 2 с вышивальной рамкой 5. Величина этого перемещения равна сумме заданной длины стежка lct и заданного значения перемещения по оси Х в соответствии с контуром рисунка или линией прокладки стежков Δх, то есть
Δlx вр=Δlx пн=lст+Δх,
где Δlx вр - величина перемещения вышивальной рамки по оси Х;
Δlx пн - величина перемещения подвижной направляющей по оси X.
Одновременно перемещение по оси Х получает электродвигатель 6.
В первом из описанных вариантов конструктивного исполнения (см. фиг.1) электродвигатель 6 получает перемещение от электродвигателя 7 транспортной каретки 4. Движение от транспортной каретки 4 одновременно передается подвижной направляющей 1 и через пружину 23 дополнительной каретке 22, а следовательно, и электродвигателю 6, одновременно перемещая их вдоль неподвижной направляющей 3 относительно исходного положения. Пружина 23 демпфирует скорость перемещения указанного электродвигателя 6 по сравнению со скоростью перемещения подвижной направляющей 1. В результате происходит перемещение подвижной направляющей 1 относительно электродвигателя 6.
При любом направлении перемещения относительно исходного положения абсолютная величина перемещения электродвигателя 6 Δlx дв. Меньше величины перемещения подвижной направляющей 1 Δlx пн приблизительно на заданную длину стежка lст, а следовательно, приблизительно равна заданному значению перемещения по оси Х в соответствии с контуром рисунка или линией прокладки стежков Δх, то есть
Δlx дв=Δlx пн-lст≈Δх.
В другом из описанных вариантов исполнения (см. фиг.2) электродвигатель 6 получает перемещение от дополнительного электродвигателя 24, который также включается по сигналу системы управления одновременно с электродвигателями 6, 7. Движение от вала дополнительного электродвигателя 24 передается шкиву 26, затем через зубчатый ремень 25 дополнительной каретке 22, а следовательно, и упомянутому электродвигателю 6, перемещая его вдоль неподвижной направляющей 3 одновременно с подвижной направляющей 1. Величина этого перемещения Δlx дв задается системой управления и равна заданному значению перемещения по оси Х в соответствии с контуром рисунка или линией прокладки стежков, то есть Δlx дв=Δх.
Таким образом, в обоих вариантах реализации обеспечивается относительное перемещение по оси Х подвижной направляющей 1, а следовательно, и вышивальной рамки 5 на любую заданную длину стежка. При этом перемещение электродвигателя 6 по оси Х осуществляется только в соответствии с контуром рисунка или линией прокладки стежков, а следовательно, возникающие при этом динамические нагрузки не оказывают существенного влияния на точность позиционирования материала.
Минимизация этих нагрузок обеспечивается во втором варианте реализации устройства с помощью системы управления, которая в данном случае полностью исключает действие сил инерции от электродвигателя 6 и дополнительной каретки 22 на подвижную направляющую 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ МАТЕРИАЛА | 1992 |
|
RU2064985C1 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ МНОГОЗВЕННЫХ МЕХАНИЗМОВ | 2008 |
|
RU2402470C2 |
| Чертежный прибор | 1989 |
|
SU1733273A1 |
| Устройство для электроэрозионной прошивки отверстий | 1986 |
|
SU1731489A1 |
| Устройство для перемещения пялец на вышивальной машине | 1980 |
|
SU918358A1 |
| СПОСОБ ВЫПОЛНЕНИЯ СТЕЖКОВ БОЛЬШОЙ ДЛИНЫ НА ВЫШИВАЛЬНОЙ МАШИНЕ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 1997 |
|
RU2129175C1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ ТОКАРНО-ФРЕЗЕРНЫЙ СТАНОК | 1996 |
|
RU2109625C1 |
| Промышленный 3D-принтер для высокотемпературной печати | 2021 |
|
RU2770997C1 |
| ДВУХКООРДИНАТНЫЙ РЕГИСТРИРУЮЩИЙ ПРИБОР | 1966 |
|
SU214116A1 |
Изобретение относится к области швейного машиностроения и может быть использовано для перемещения материала в вышивальных автоматах и полуавтоматах, а также в вышивальных приставках швейных машин. Устройство для перемещения материала содержит размещенные взаимно перпендикулярно подвижную направляющую с рабочей кареткой и по меньшей мере одну неподвижную направляющую с транспортной кареткой, вышивальную рамку, жестко связанную с рабочей кареткой, и управляемые электроприводы кареток с механизмами перемещения и электродвигателями. Подвижная направляющая установлена с возможностью перемещения вдоль неподвижной направляющей и относительно электродвигателя рабочей каретки, а электродвигатель установлен с возможностью перемещения параллельно неподвижной направляющей. В предпочтительном варианте реализации он связан с дополнительным управляемым электроприводом. При этом абсолютная величина перемещения подвижной направляющей относительно электродвигателя рабочей каретки выбрана больше заданной длины стежка. Технический результат изобретения - уменьшение сил инерции в элементах конструкции устройства и за счет этого повышение точности позиционирования материала, что позволяет повысить скорость его перемещения, а следовательно, и производительность вышивальных машин без ухудшения качества вышивки. 3 з.п. ф-лы, 2 ил.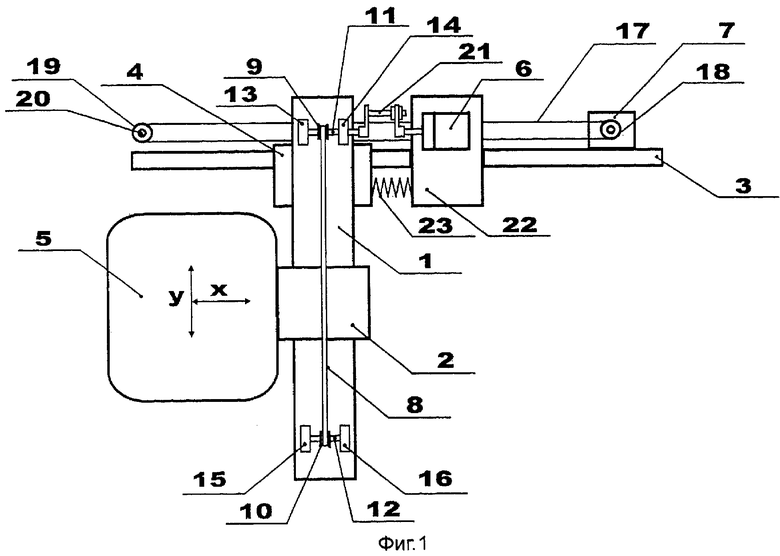
| JP 62097959 A, 07.05.1987 | |||
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ МАТЕРИАЛА | 1992 |
|
RU2064985C1 |
| Устройство для перемещения пялец на вышивальной машине | 1980 |
|
SU918358A1 |
| Устройство для перемещения материалаНА ВышиВАльНОй МАшиНЕ | 1979 |
|
SU848500A1 |
| DE 4132859 А1, 30.04.1992 | |||
| US 4280420 А, 28.07.1981. | |||

