Изобретение относится к машиностроению и может быть использовано для ручного управления перемещением рабочего инструмента в условиях высоких вибраций.
Известно задающее устройство манипулятора, содержащее основание, шарнирно установленную на нем рукоятку управления, выполненную в виде стержня, жестко связанного со сферой, на которой закреплены пальцы, каждый из пальцев размещен между двумя упругими пластинами, закрепленными одним концом на основании с возможностью взаимодействия со стержнем, сферой и пальцами соответственно, при этом на упругих пластинах установлены датчики положения (а.с. № 1576309, кл. В 25 J 13/02).
Работает устройство следующим образом. Оператор, манипулируя рукояткой управления осевыми, радиальными и круговыми перемещениями стержня, вызывает деформацию упругих пластин, вызывая срабатывание соответствующих датчиков.
Недостатком устройства является срабатывание датчиков от упирающихся в пальцы и стержень плоских пружин. Срабатывание датчиков в этом случае может происходить от незначительного отклонения рукоятки под воздействием вибраций.
Известно задающее устройство манипулятора, содержащее основание и установленную на нем с помощью упругой подвески рукоятку управления с закрепленными на ней пальцами, причем упругая подвеска выполнена в виде плоских пружин, закрепленных одним концом на основании с возможностью взаимодействия каждого из пальцев со свободными концами соответствующих ему плоских пружин, на которых установлены датчики деформации, при этом рукоятка с пальцами образуют пространственную крестовину, а каждый палец имеет возможность взаимодействия с дополнительно установленным механизмом возврата пальца в исходное положение (а.с. № 1662841, кл. В 25 J 13/00).
Работает устройство следующим образом.
Оператор манипулирует рукояткой управления, отклоняя или вращая ее. При этом пальцы деформируют в соответствующем направлении перемещения рукоятки плоские пружины до срабатывания датчиков. Упоры создают дополнительное противодействие усилиям оператора, что позволяет при незначительных отклонениях рукоятки управления имитировать значительные усилия.
Недостатком устройства является возможность самопроизвольного срабатывания датчиков, которые могут включаться от деформации плоских пружин под воздействием вибраций подвижных частей задающего устройства.
Наиболее близким решением по технической сущности, т.е. прототипом, является задающее устройство для управления манипулятором, содержащее связанную с основанием через шаровой шарнир штангу, рукоятку управления, установленную на штанге с возможностью перемещения вдоль ее оси, три пары рычагов, две пары из которых жестко связаны со штангой и расположены взаимно перпендикулярно, а третья пара жестко связана с рукояткой, а также три сумматора электрических сигналов, кроме того, устройство снабжено упругими пластинами, консольно закрепленными на каждом рычаге, тензодатчиками, расположенными на противоположных плоскостях каждой упругой пластины, тремя парами упоров, подпружиненными к основанию, и тремя парами упоров, установленных на основании с возможностью регулировочного перемещения (а.с. № 1579772, кл. В 25 J 13/02).
Задающее устройство работает следующим образом. Перемещением рукоятки на угол от 0 до 2° происходит задавливание подпружиненных упоров, и оператор начинает чувствовать направление движения рукоятки. Дальнейшее ее перемещение приводит к деформации упругих пластин, вследствие чего изменяют свое сопротивление тензодатчики, которые передают сигнал в систему управления, и начинается микроперемещение мунипулятора. Продолжение перемещения рукоятки приводит к взаимодействию противоположных упругих пластин с регулируемыми упорами. Деформация этих пластин вызывает сигнал с тензодатчиков, находящихся на этих пластинах, и поступление его в систему управления. Начинается ускоренное перемещение манипулятора.
Недостатком устройства является высокая чувствительность элементов: упругая пластина - тензодатчик, которые могут привести при подходе к упорам в условиях вибраций к самовыключению или самовыключению датчиков.
Кроме того, отсутствие регулировки подпружиненных упоров по положению приводит к невозможности выставки нейтрального положения рукоятки, т.к. необходимо исключить воздействие пары подпружиненных упоров через рычаг друг на друга.
Недостатком является также расположение подпружиненных упоров в осевом направлении на стержне выше шаровой опоры. В этом случае ухудшается балансировка рукоятки, и, соответственно, требуется увеличение усилия на подпружиненных упорах для обеспечения нейтрального положения, которое впоследствии придется постоянно преодолевать оператору. При этом снижается чувствительность рукоятки, управляемость ею.
Задачей предлагаемого изобретения является повышение надежности работы устройства.
Указанная задача достигается тем, что в известном решении подпружиненное упоры и датчики установлены в регулируемых во оси упоров втулках с возможностью взаимодействия между собой в конце хода этих упоров, а на шаровом шарнире со стороны, противоположной рукоятке, закреплен кронштейн, на оси которого установлен третий рычаг с возможностью взаимодействия одним концом с рукояткой, перемещаемой вдоль своей оси, а другим - поочередно с каждой парой подпружиненных упоров.
Сопоставительный анализ с прототипом позволяет сделать вывод, что заявляемое устройство "Задающее устройство манипулятора" обеспечивает простую наладку положения подпружиненных упоров и тем самым обеспечивает поочередное воздействие этих упоров на рычаги, устанавливая рукоятку при прекращении воздействия на нее оператором в нейтральное положение даже при интенсивных вибрациях.
Расположение кронштейна на шаровом шарнире со стороны, противоположной рукоятке, на оси которого установлен третий рычаг с возможностью взаимодействия одним концом с рукояткой, перемещаемой вдоль своей оси, другим - поочередно с каждой парой упоров, позволяет улучшить балансировку задающего устройства и тем самым повысить ее чувствительность, а также обеспечить точность остановки в нейтральном положении.
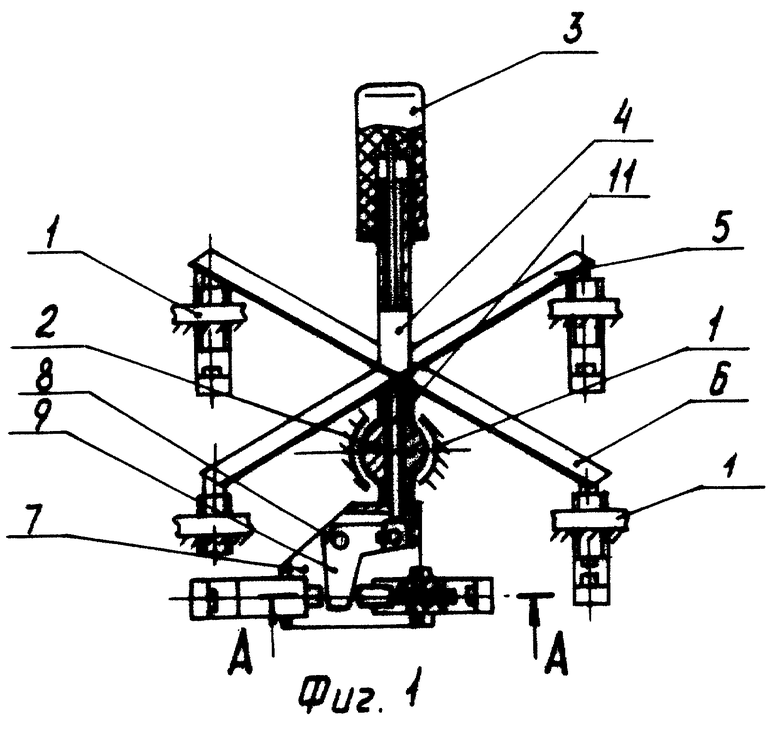
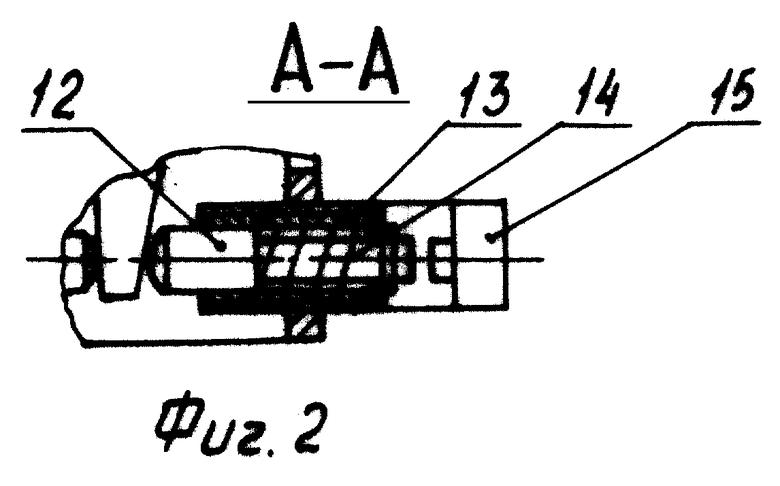
Следовательно, заявляемое техническое решение соответствует критерию "Новизна". Сравнение заявляемого решения не только с прототипом, но и с другими техническими решениями в данной области техники не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию "изобретательский уровень". Сущность технического решения подтверждается чертежами, на которых изображено: на фиг.1 - устройство, фронтальный вид; на фиг.2 - устройство, разрез А-А на фиг.1.
Устройство содержит корпус 1 (основание), установленный в нем с возможностью поворота шаровой шарнир 2, рукоятку 3, установленную на штанге 4 и перемещаемую вдоль своей оси, рычаги 5 и 6, жестко укрепленные на штанге 4, жестко связанный с шаровым шарниром 2 кронштейн 7, установленный на его горизонтальной оси рычаг 9, шарнирно связанный через ось 10 с тягой рукоятки 11, шесть подпружиненных упоров 12, находящихся во втулках 13, пружины 14 и датчики 15.
Устройство работает следующим образом.
Оператор, манипулируя рукояткой 3, отклоняет ее в направлении перемещения инструмента. В зависимости от направления рычаги 5 или 6 нажимают на соответствующие упоры 12 и стоящие за ними датчики 15. Перемещением рукоятки 3 вверх-вниз и штанги 4 производится поворот рычага 9 и включение датчиков через упоры 12 на кронштейне 7. Таким образом задается сигнал на вертикальное перемещение. Возврат рукоятки в нейтральное положение происходит при помощи подпружиненных упоров 12, положение которых настраивается вращением втулок 13. При этом подпружиненные упоры, нажимающие на соответствующий рычаг, должны настраиваться с зазором, исключая тем самым воздействие упоров 12 на рычаги по всем трем координатам в нейтральном положении. Поэтому обеспечивается четкая фиксация нейтрального положения рукоятки за счет начального усилия пружин 14 и настраиваемых зазоров между упорами 12 и рычагами 5, 6, 9, на которые воздействуют эти упоры.
Таким образом, благодаря тому, что подпружиненные упоры и датчики установлены в регулируемых по оси упоров втулках, а на оси кронштейна, закрепленного на шаровом шарнире со стороны, противоположной рукоятке, установлен третий рычаг с возможностью взаимодействия одним концом с рукояткой, а другим - поочередно с каждой парой подпружиненных упоров, обеспечивается точная фиксация нейтрального положения рукоятки и надежное включение ее по координатам в условиях высоких вибраций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство для управления манипулятором | 1988 |
|
SU1579772A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Устройство для преддоильной обработки вымени и доения животных | 1986 |
|
SU1349735A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАВОДКОЙ | 1997 |
|
RU2117900C1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Установка для многодуговой автоматической сварки | 1988 |
|
SU1722757A1 |
Изобретение относится к машиностроению и может быть использовано для ручного управления перемещением рабочего инструмента в условиях высоких вибраций. Задающее устройство содержит связанную с основанием через шаровой шарнир штангу, рукоятку, установленную на штанге с возможностью перемещения вдоль своей оси, три рычага, два из которых связаны со штангой и расположены перпендикулярно, три пары упоров, подпружиненных к основанию, три пары датчиков, установленных с возможностью отслеживания перемещения рычагов по всем трем координатам. Подпружиненные упоры и датчики установлены в регулируемых по оси упоров втулках с возможностью взаимодействия между собой в конце хода этих упоров. На шаровом шарнире со стороны, противоположной рукоятке, закреплен кронштейн, на оси которого установлен третий рычаг с возможностью взаимодействия одним концом с рукояткой, а другим - поочередно с каждой парой подпружиненных упоров. Изобретение позволит повысить надежность работы устройства. 2 ил.
Задающее устройство манипулятора, содержащее связанную с основанием через шаровой шарнир штангу, рукоятку, установленную на штанге с возможностью перемещения вдоль своей оси, три рычага, два из которых жестко связаны со штангой и расположены взаимно перпендикулярно, три пары упоров, подпружиненных к основанию, три пары датчиков, установленных с возможностью отслеживания перемещения рычагов по всем трем координатам, отличающееся тем, что подпружиненные упоры и датчики установлены в регулируемых по оси упоров втулках с возможностью взаимодействия между собой в конце хода этих упоров, а на шаровом шарнире со стороны, противоположной рукоятке, закреплен кронштейн, на оси которого установлен третий рычаг с возможностью взаимодействия одним концом с рукояткой, а другим - поочередно с каждой парой подпружиненных упоров.
| Задающее устройство для управления манипулятором | 1988 |
|
SU1579772A1 |
| Задающее устройство для управления роботом-манипулятором | 1986 |
|
SU1348167A1 |
| Задающее устройство для дистанционного управления роботом-манипулятором | 1988 |
|
SU1516344A1 |
| US 4348634, 07.09.1982. | |||

