Изобретение относится к машиностроению и может быть использовано, например, для ручного управления перемещением рабочего инструмента сварочного робота при его программировании методом обучения.
Целью изобретения является расширение функциональных возможностей устройства и повышение производительности путем увеличения числа одновременно управляемых степеней подвижности робота.
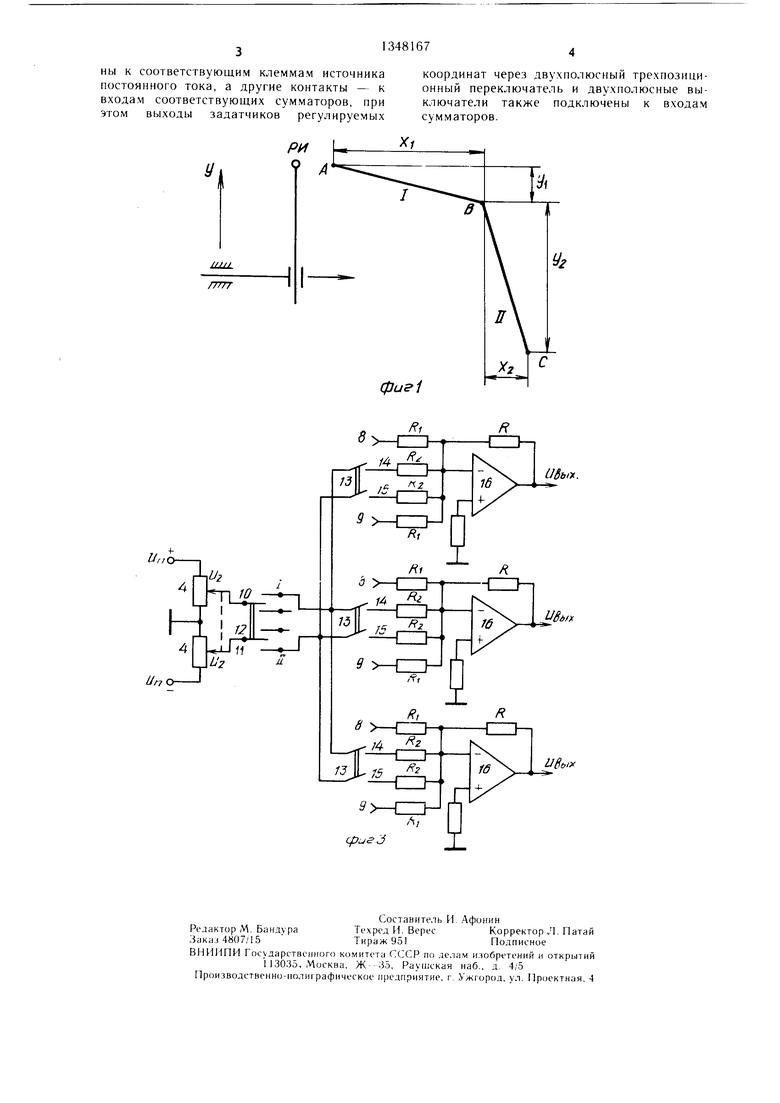
На фиг. 1 показана схема расположения линии соединения свариваемых изделий в позиции сварки; на фиг. 2 - конструкция предлагаемого устройства; на фиг. 3 - принципиальная схема устройства.
Задаюшее устройство для управления роботом-манипулятором содержит рукоятку 1, подвижную скобу 2, ось 3, два задатчика 4 регулируемых координат, трехстепенной механизм 5 включения движения, рычаг 6, однополюсные выключатели 7 с нормально разомкнутыми контактами, одни концы которых подключены к положительным или отрицательным полюсам источника питания, а другиесоответственно к выходным
шинам 8 и 9, выходные шины 10 и 11 за- датчиков 4, двухполюсный трехпозиционный переключатель 12 с нейтральным положением, вмонтированные в рукоятку 1 три двух- по. поспых выключателя 13, входные шины 14 и 15 сумматоров 16.
Устройство работает следуюп1им образом.
При перемещении рабочего инструмента (РИ) робота из исходной точки .Л (фиг. 1) в заданную точку В линии соединения оне- ратор с помощью рукоятки 1 включает трехстепенной механизм 5 по координатам X и Y, в результате чего в зависимости от направления движения замыкаются соответствующие контакты однополюсных выключателей 7 и с выходных шин 8 и 9 на соответствующие входы сумматоров 16 поступают сигнал LJ|. Выходные сигналы, сформированные сумматорами 16, поступают в систему управления роботом, в результате чего рабочий инструмент робота будет двигаться по двум координатам. Величина сигнала па выходе сумматоров определяется выражением
U-.u, Ki- Ui,
гдеК -коэффициент усиления сумма тора.
Так как величина перемещения , то оператор при выводе рабочего инструмента в точку В периодически отключает движение по координате Y.
Для сокращения времени неремещения рабочего инструмента по координате X оператор устанавливает двухполюсный трехпозиционный переключатель 12 в положение 1 или 11 (в зависимости от требуемого направления движения рабочего инструмента) и с номощью большого пальца руки
нажимает на один из двухполюсных выключателей 13. В результате этого сигнал с задатчиков 4 по 10 или 11 поступает иа один из входов шин 14 или 15 соответствующего сумматора 16, на выходе которого получают суммарный сигнал, величина которого равна
U.b, Ui+Ka- U2,
р
где K)% - коэффициент усиления сумма тора.
Осуществляя поворот скобы 2 вокруг оси 3, с которой жестко связаны роторы задатчиков, можно получить изменение величины сигнала на выходе задатчика и соответственно на выходе сумматора. Этот сигнал поступает в систему управления положением руки робота, в результате чего изменяется, например, скорость перемещения рабочего инструмента по соответствующей координате. Величина сигнала задатчика выбирается
при этом в соответствии с индивидуальными особенностями оператора. При приближении рабочего инструмента к заданной точке оператор отключает сигнал с задатчиков 4 и с помощью сигналов трехсте
пенного механизма 5 включения осуществляет позиционирование рабочего инструмента в заданной точке линии соединения с требуемой точностью. Аналогичным образом может осуществляться управление скоростного перемещения рабочего инструмента по лю- бой из координат.Ч, Y, Z, например при перемещении рабочего инструмента из точки В в точку С, когда .
Формула изобретения
Задающее устройство для управления роботом-манипулятором, содержащее рукоятку с подвижной скобой, снабженной первым задатчиком регулируемой координаты, причем подвижная скоба выполнена с осью вращения, совпадающей с осью
новорота пальцев оператора в суставах между второй и третьей фалангами, отличающееся тем, что, с целью расширения функциональных возможностей и повышения производительности путем увеличения числа одновременно управляемых координат, в него дополнительно введены трехстепенной механизм включения, жестко связанный с рукояткой, по два однополюсных выключателя с нормально разомкнутыми контактами на каждую степень подвижности роботаманипулятора, установленные на рукоятке три двухполюсных выключателя, второй за- датчик регулируемой координаты, расположенный на одной оси с первым задатчиком, двухполюсный трехпозиционный не- реключатель с нейтральным положением и
три сумматора, причем трехстепенной механизм включения имеет возможность взаимодействия с однополюсными вык.тю- чателями, одни контакты которых подключе
ны к соответствующим клеммам источника постоянного тока, а другие контакты - к входам соответствующих сумматоров, при этом выходы задатчиков регулируемых
координат через двухполюсный трехпозици- онный переключатель и двухполюсные выключатели также подключены к входам сумматоров.
/7777
фuгi
и„
.
Шш
ивыУ
cpueJ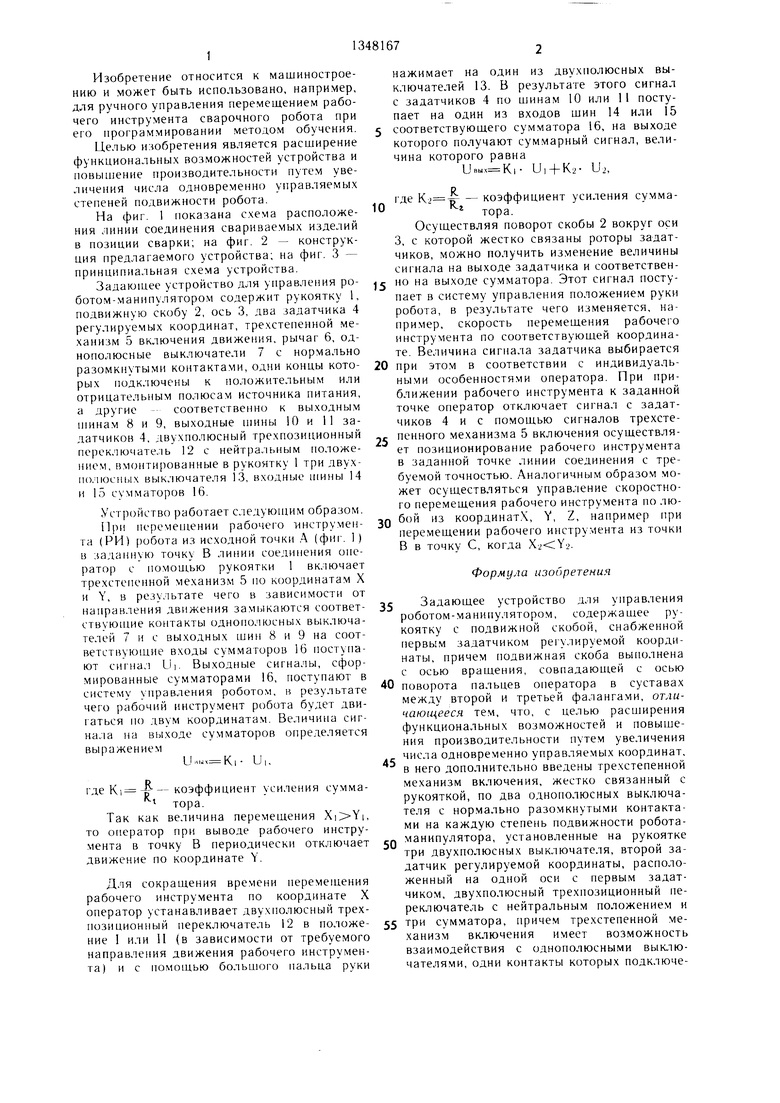
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство для дистанционного управления роботом-манипулятором | 1988 |
|
SU1516344A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Устройство для управления движением сочлененных транспортных тележек | 1991 |
|
SU1823824A3 |
| Устройство для записи программы контурного управления промышленным роботом | 1978 |
|
SU930255A1 |
| Стенд-тренажер для оценки качества задания программы перемещений манипулятора | 1987 |
|
SU1511111A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ХИРУРГИЧЕСКИМ РОБОТОМ | 2021 |
|
RU2775876C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| МЕХАНИЗИРОВАННЫЕ ХИРУРГИЧЕСКИЕ ИНСТРУМЕНТЫ С МЕХАНИЗМАМИ БЛОКИРОВКИ СИСТЕМЫ ЗАПУСКА | 2014 |
|
RU2675082C2 |
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2653808C2 |
Изобретение относится к .машиностроению и может быть использовано для ручного управления перемещением рабочего инструмента робота при его программировании методо.м обучения. Цель изобретения - расширение функциональных воз2. можностей устройства и повышение производительности при программировании робота. Устройство содержит рукоятку 1 с подвижной скобой 2, задатчики 4 регулируемых координат, по два однополюсных выключателя 7 с нормально разомкнутыми контактами на каждую степень подвижности робота-манипулятора. Введение в устройство трехстепенного ме.ханизма 5 включения, жестко соединенного с рукояткой 1 и взаимодействующего с выключателями 7, а также трех двухполюсных выключателей 13 и тре.х сумматоров, на входы которых поступает напряжение от соответствующих контактов выключателей 7 и через трехполюсный переключатель и выключатели 13 - от задат- чиков 4, позволяет увеличить число одновременно управляемых степеней подвижности робота. 3 ил. (Л со 00 О5 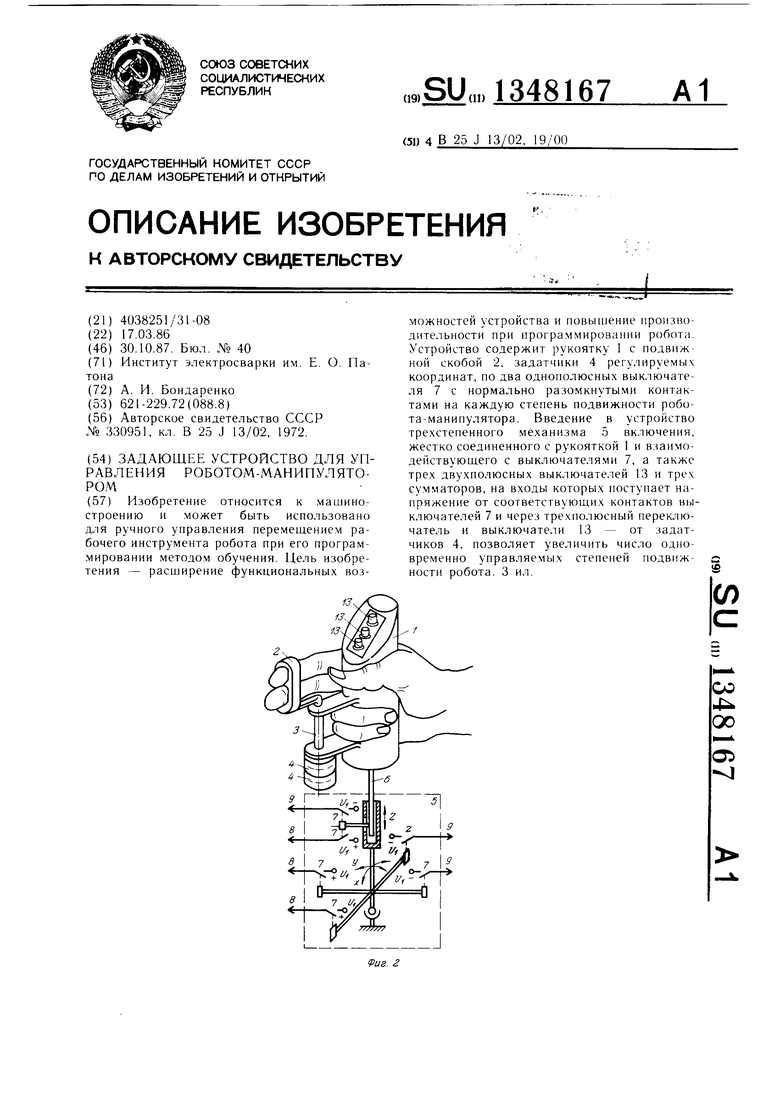
Составитель И. Афонин
Редактор М. БандураТехред И. ВересКорректор Л. Патай
Заказ 4807/15Тираж 951Подписное
ВННИПИ Гоеударетвенного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж--35, Раушская иаб., Д- 4;5 Производствепно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
| СХВАТ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРАЗС-^ООгОЗ;-;/'.;'; <M•>&.^-^'Sf'.;'^;;•S -Г-ЧГ''^.^: •'"'Л'Ч? •, Г: 2':Й:г^!?^-г^ЛН:ги;';и;:и>&' | 0 |
|
SU330951A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
