Ссылка на родственные заявки
Настоящая заявка связана с предварительной заявкой на патент США №60/301891, поданной 29 июня 2001 г., на изобретение "Рекурсивный нелинейный метод с использованием обратной связи для оценки сил и моментов суставов на основе кинезиологических измерений" и с предварительной заявкой на патент США №60/353378, поданной 31 января 2002 г., на изобретение "Прямые решения проблем обратной динамики: метод линеаризации обратной связи", на основании которых испрашивается приоритет согласно положению 35 U.S.C. пар.119(a).
А. Область техники, к которой относится изобретение
Настоящее изобретение относится к анализу движений человека, в частности к анализу сил и моментов суставов с использованием нелинейной обратной связи при прямом моделировании динамики.
В. Описание известного уровня техники
При изучении движений человека для оценки сил и моментов суставов обычно используется анализ обратной (инверсной) динамики. При обычном анализе обратной динамики силы и моменты суставов вычисляются из наблюдений за сегментальным движением. Анализ обратной динамики обычно используется при решении проблем биомеханики, поскольку внутренние силы суставов человека невозможно измерить простым способом. Однако можно измерить сегментальные движения и вывести углы суставов из измеренного смещения, чтобы определить силы и моменты соответствующих суставов.
Одной из проблем использования обратной динамики при исследовании движений человека является возникновение погрешности, вызванной вычислением производных высшего порядка для определения сил и моментов суставов. Методы с использованием концепции обратной динамики в биомеханике хорошо работают, если входные сигналы не содержат шума, а динамическая модель безупречна. Однако экспериментальные наблюдения несовершенны и содержат шумы. Источниками шума являются как измерительное устройство, так и сам сустав. Методы обратной динамики для вычисления моментов суставов требуют вычисления производных высшего порядка на основании экспериментальных наблюдений. В частности, член углового ускорения является второй производной от угла сустава, а линейное ускорение является второй производной ускорения центра масс. Численное дифференцирование экспериментальных наблюдений увеличивает шум. Особое значение для решения проблемы вычисления скоростей и ускорений имеет наличие высокочастотного шума. Амплитуда каждой из гармоник возрастает с увеличением ее гармонического числа: скорости возрастают линейно, а ускорения возрастают пропорционально квадрату гармонического числа. Например, дифференцирование второго порядка сигнала с высокочастотным шумом ω может привести к получению сигнала с частотными компонентами ω2. В результате такого параболического усиления шума получаются ошибочные вычисления сил и моментов суставов.
Хотя существуют методы фильтрации шума, такая фильтрация сложна в реализации и требует много времени, поскольку требуется большой анализ для отделения истинного сигнала в биомеханических данных от шума. Например, для уменьшения высокочастотных ошибок обычно используется фильтрация нижних частот. Однако сложность фильтрации нижних частот состоит в выборе оптимальной частоты среза fc. Поскольку общего решения для выбора оптимальных параметров фильтрации не существует, результаты методов фильтрации часто ненадежны.
Для оценки сил и моментов суставов без ошибок, обусловленных выполнением обычного анализа обратной динамики, были предложены подходы на основе оптимизации. В отличие от обратной динамики методы на основе оптимизации не требуют численного дифференцирования. Однако применение решений на основе оптимизации ограничено, потому что эти методы требуют больших вычислительных затрат, не гарантируют сходимости и обычно очень сложны в реализации.
Другая проблема, связанная с использованием обратной динамики для анализа движений человека, заключается в том, что инверсный метод не позволяет прогнозировать характер новых движений. При обратной динамике силы и моменты вычисляются из наблюдаемых реакций. Прогнозирование новых движений требует вычисления реакции, ожидаемой в результате приложения сил и моментов. Анализ обратной динамики не дает возможности прогнозирования, так как вычисляются силы и моменты, а не реакция, ожидаемая в результате приложения этих сил и моментов.
Таким образом, существует потребность в эффективных с точки зрения вычислений системе и способе, которые: (1) способны оценивать силы и моменты суставов без погрешностей, обусловленных производными высшего порядка; (2) не требуют замкнутого анализа всего тела в замкнутом виде; и (3) позволяют прогнозировать характер движений человека.
Краткое изложение сущности изобретения
Один вариант осуществления настоящего изобретения позволяет оценить нагрузки на суставы человека. Нагрузка на сустав включает в себя силы и моменты, действующие на сустав. Модуль прямой динамики определяет кинематические данные путем численного интегрирования (или моделирования) динамических уравнений движения. Контроллер коррекции ошибок сводит к нулю ошибку слежения между кинематическими данными, полученными из прямого моделирования, и измеренными (или желательными) кинематическими данными. Контроллер коррекции ошибок генерирует модифицированное ускорение для ввода в модуль обратной динамики. В одном варианте модифицированное ускорение представляет собой значение, определенное без учета второй производной измеренных (или желательных) кинематических данных. Таким образом, оцененная нагрузка на суставы при ее вводе в модуль прямой динамики отслеживает измеренные (или желательные) кинематические данные без ошибок, связанных с вычислением производных высшего порядка "зашумленных" кинематических данных.
В другом варианте осуществления нагрузки на суставы оцениваются рекурсивно для плоскостной последовательно связанной системы. При рекурсивном методе процесс начинается на первом конце последовательной цепи сегментов, и нагрузки на суставы вычисляются по направлению ко второму концу последовательной цепи. Сегменты в этой цепи соединены между собой суставами, и силы и моменты реакций в суставе являются общими для двух соединенных между собой сегментов. Нагрузки на сустав, оцененные для первого сегмента, используются при оценке для следующего сегмента до тех пор, пока не будет достигнут интересующий сустав или суставы. Это значит, что результатом рекурсии является вычисление сил и моментов в точке соединения для следующего сегмента. Данный результат используется в качестве ввода (входных данных) для анализа следующего сегмента. Следовательно, рекурсивный метод не требует моделирования динамики всего тела. Хотя в каком-либо конкретном случае может потребоваться рекурсивное моделирование динамики всего тела, тем не менее, рекурсивный метод обеспечивает гибкость, которая позволяет уменьшить источники ошибки.
Рекурсивные варианты включают оценки открытой (незамкнутой) цепи и оценки закрытой (замкнутой) цепи. Система с незамкнутой цепью ограничивается средой на одном конце, а остальные терминальные сегменты свободны. В системе с замкнутой цепью более одного конца находится в контакте со средой. Сегменты системы связи нумеруются по порядку рекурсии, от сегмента 1 к сегменту n, который является последним рассматриваемым сегментом. Сегмент n не обязательно должен быть последним сегментом в системе из множества тел. Скорее, за сегмент n принимается сегмент, на котором желательно остановить рекурсивное вычисление, так как все интересующие силы и моменты уже найдены. Для инициации рекурсии необходимо иметь силу и момент, действующие на первый сегмент. Например, при анализе движений человека обычно измеряются силы противодействия основания (реакции опоры) под ногами, которые инициализируют рекурсивные уравнения. Использование сил реакции опоры повышает точность оценок нагрузки на суставы, находящиеся в непосредственной близости к основанию.
В другом варианте система слежения согласно изобретению может быть применена для динамики с замкнутой формой. Уравнения системы с замкнутой формой для системы неограниченного жесткого тела описываются числом n дифференциальных уравнений. Подобно описанным вариантам с использованием рекурсии, здесь используется закон управления для линеаризации и разделения (развязывания) динамики системы.
Другие признаки изобретения, его сущность и различные преимущества будут более очевидны из прилагаемых чертежей и подробного описания.
Краткое описание чертежей
Прилагаемые чертежи, входящие в состав материалов настоящей заявки, иллюстрируют несколько вариантов воплощения изобретения и в совокупности с описанием служат для пояснения принципов настоящего изобретения.
Фиг.1 иллюстрирует, как можно использовать рекурсивное вычисление для отделения динамики нижней части тела от динамики верхней части тела,
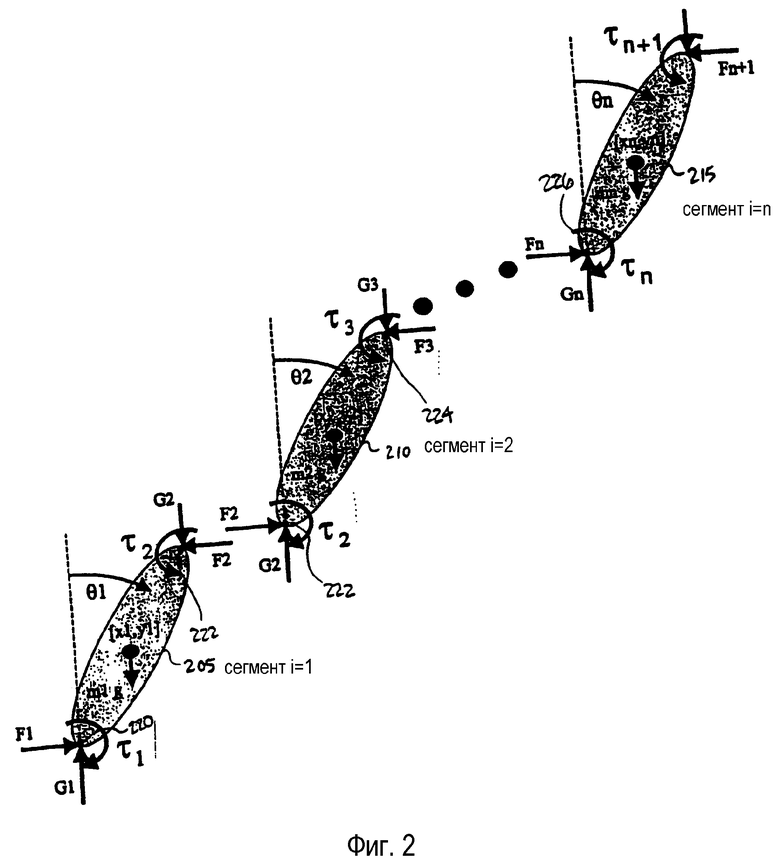
фиг.2 изображает схему сил свободного тела, действующих на сегменты в плоскостной последовательно связанной системе с незамкнутой цепью,
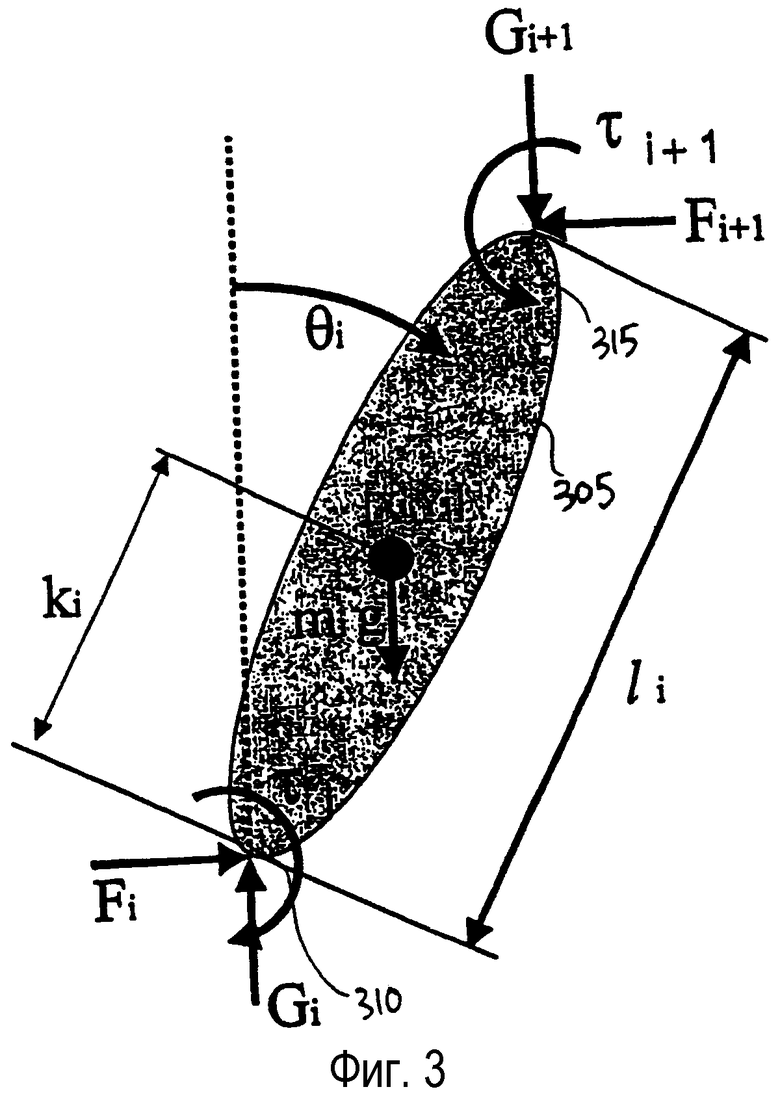
фиг.3 изображает схему свободного тела для одного сегмента в последовательно связанной системе,
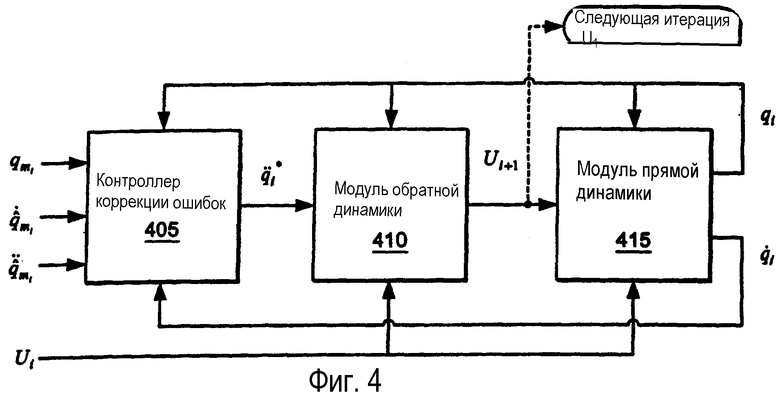
фиг.4 изображает структурную схему системы слежения для сегмента i связи,
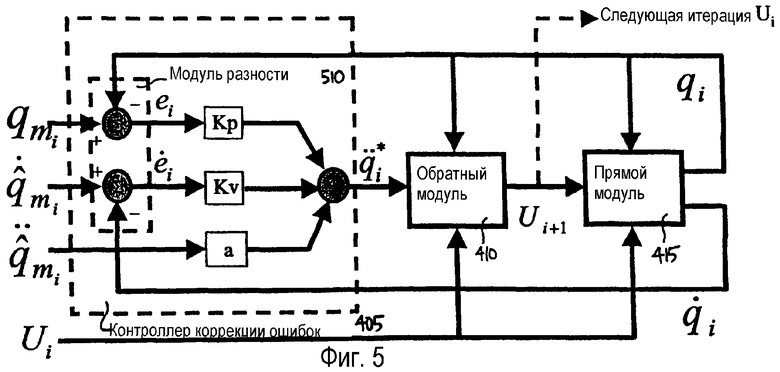
фиг.5 изображает структурную схему системы слежения для сегмента i связи, иллюстрирующую более детально контроллер коррекции ошибок,
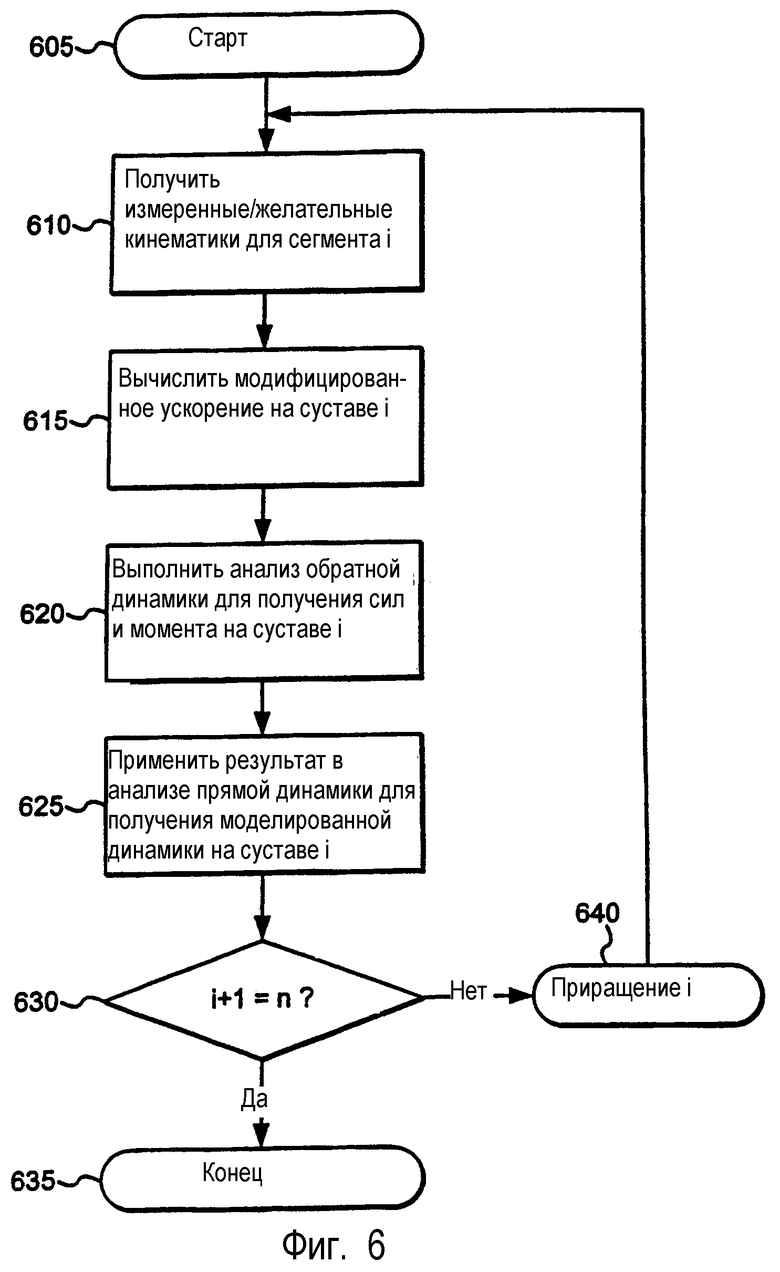
фиг.6 изображает алгоритм, иллюстрирующий процесс рекурсивного слежения,
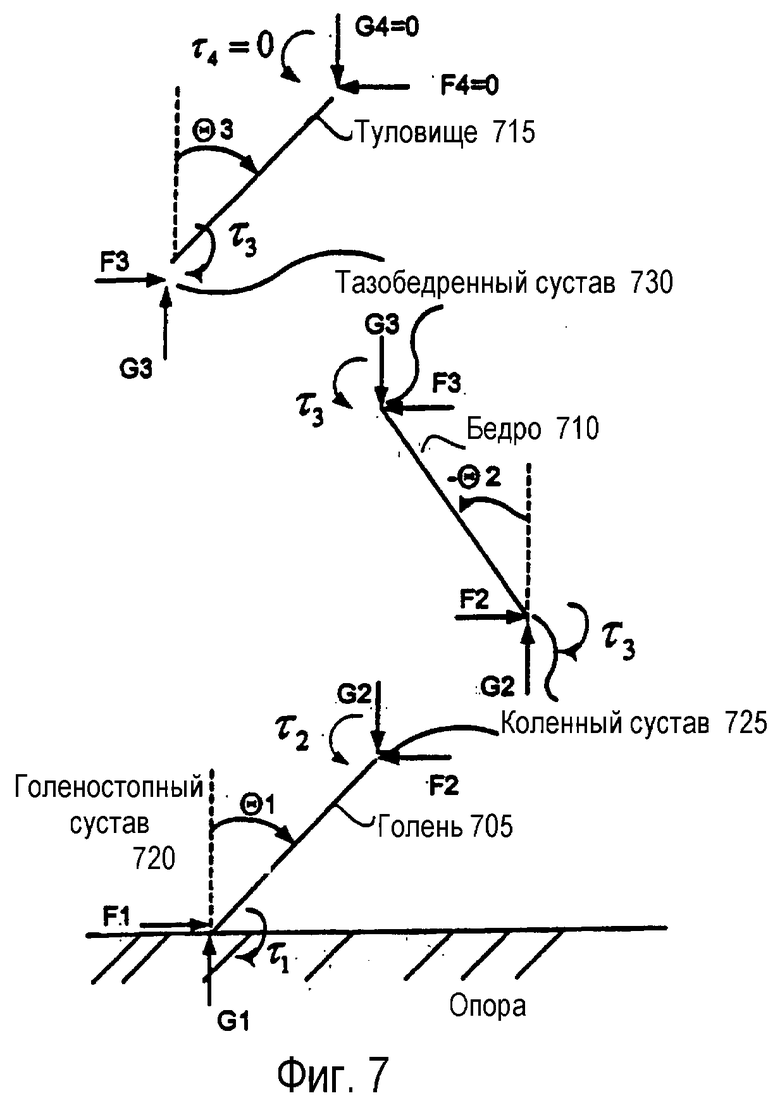
фиг.7 изображает схему свободного тела, иллюстрирующую двухмерную систему из трех сегментов,
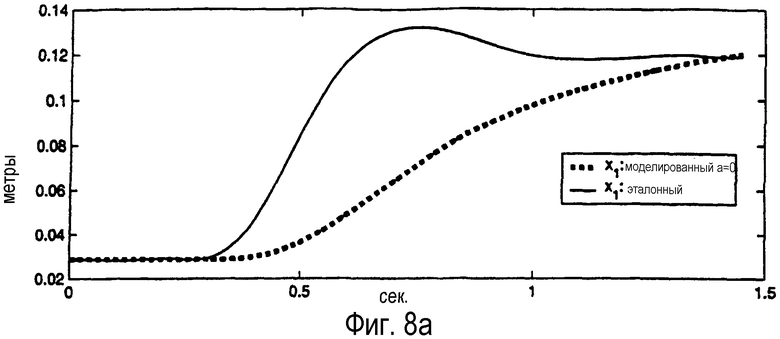
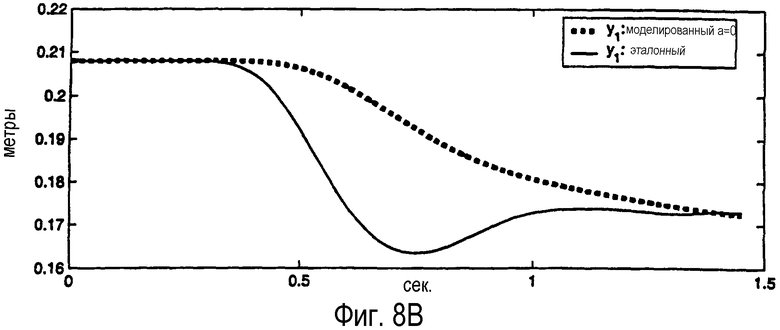
фиг.8А-8С изображают графики, иллюстрирующие точность слежения для смещения голеностопного сустава по фиг.7 с использованием малых коэффициентов обратной связи и без учета ускорений,
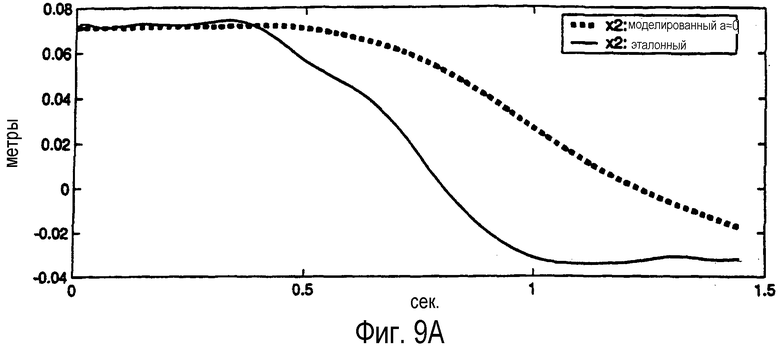
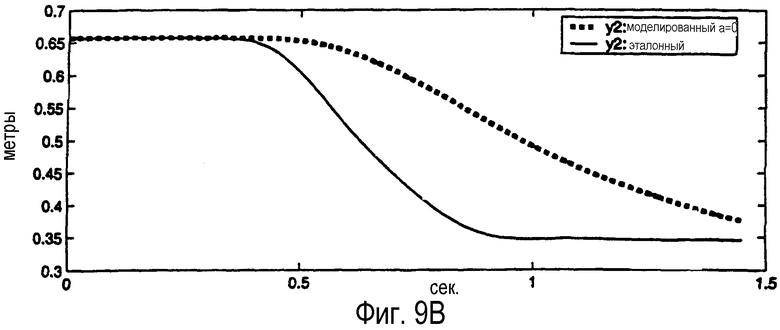
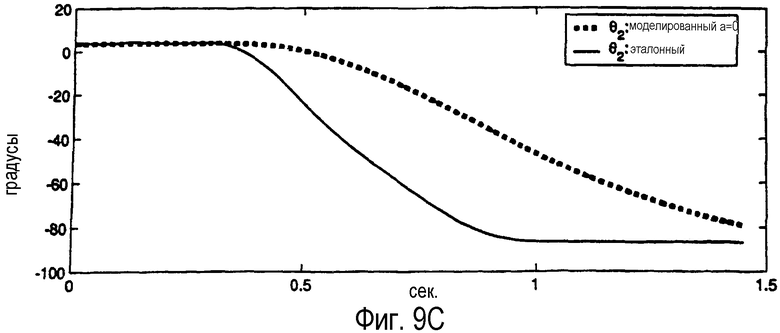
фиг.9А-9С изображают графики, иллюстрирующие точность слежения для смещения коленного сустава по фиг.7 с использованием малых коэффициентов обратной связи и без учета ускорений,
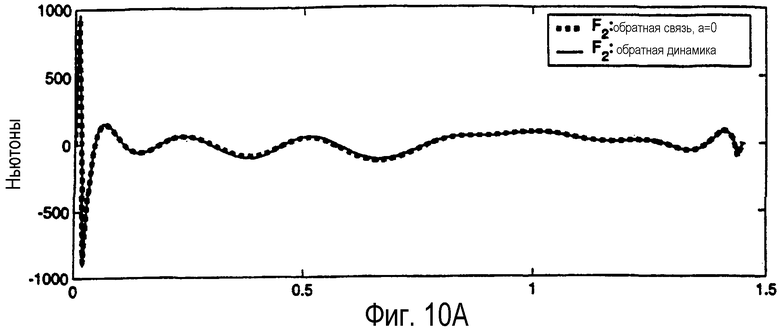
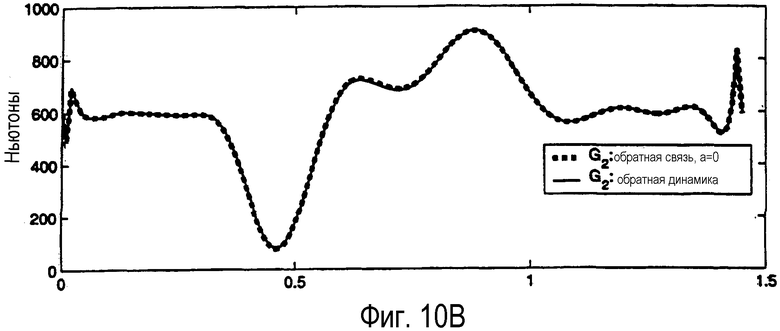
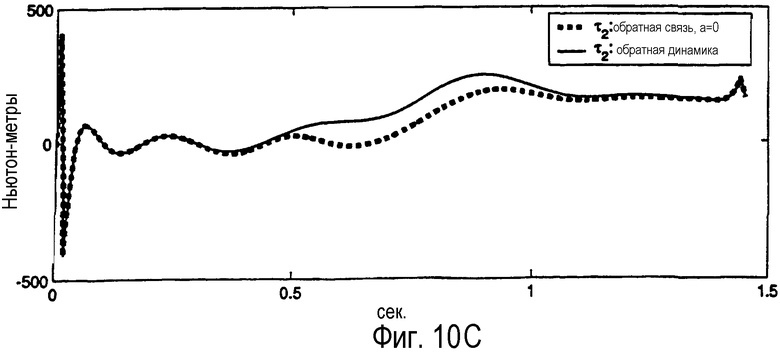
фиг.10А-10С изображают графики, иллюстрирующие точность слежения для сил и моментов коленного сустава по фиг.7 с использованием малых коэффициентов обратной связи и без учета ускорений,
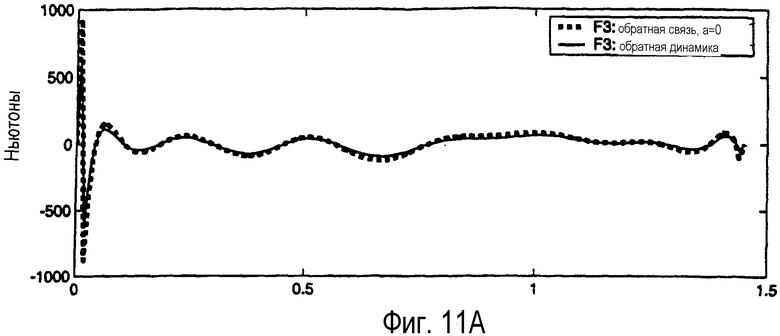
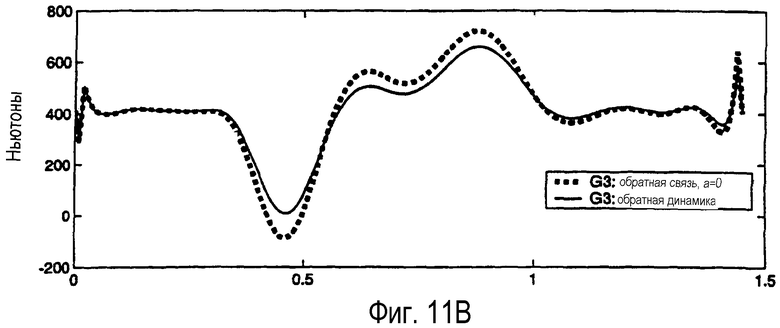
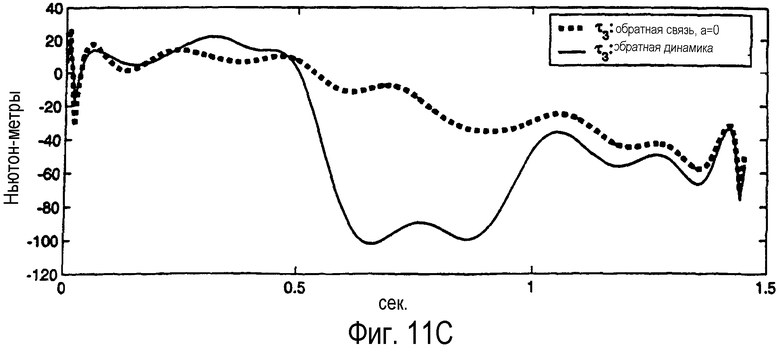
фиг.11А-11С изображают графики, иллюстрирующие точность слежения для сил и моментов тазобедренного сустава по фиг.7 с использованием малых коэффициентов обратной связи и без учета ускорений,
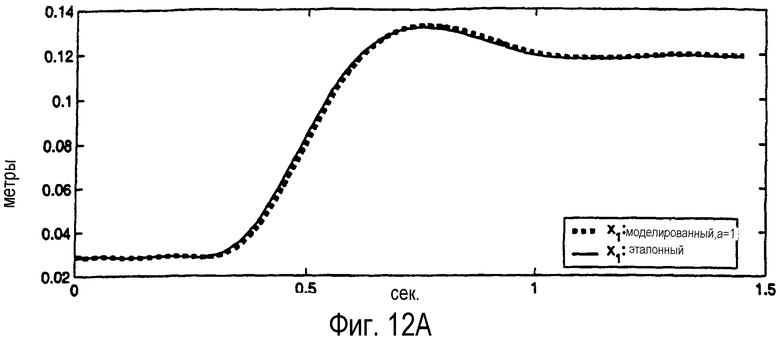
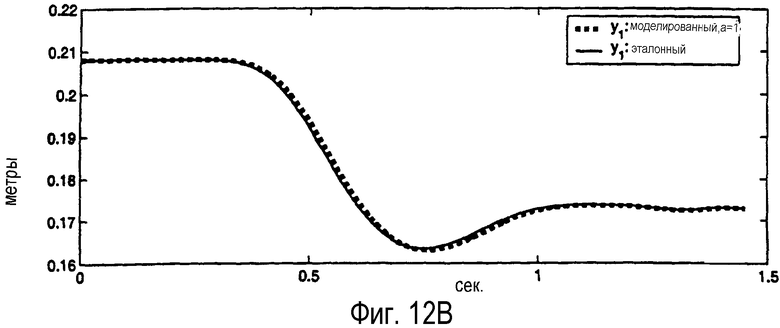
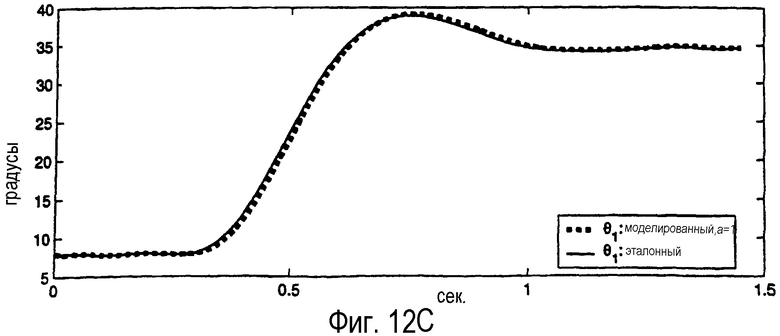
фиг.12А-12С изображают графики, иллюстрирующие точность слежения для смещения голеностопного сустава по фиг.7 с использованием малых коэффициентов обратной связи и с учетом ускорений,
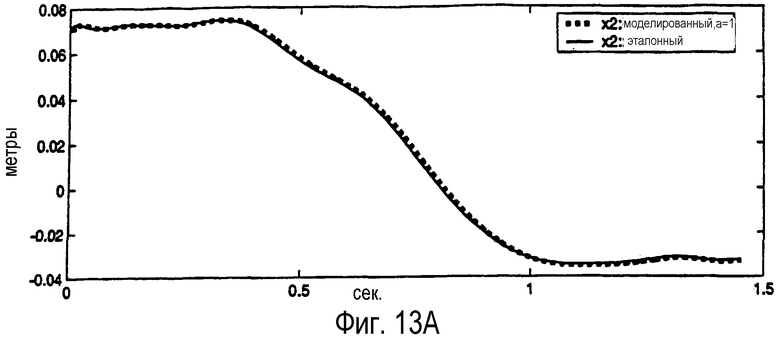
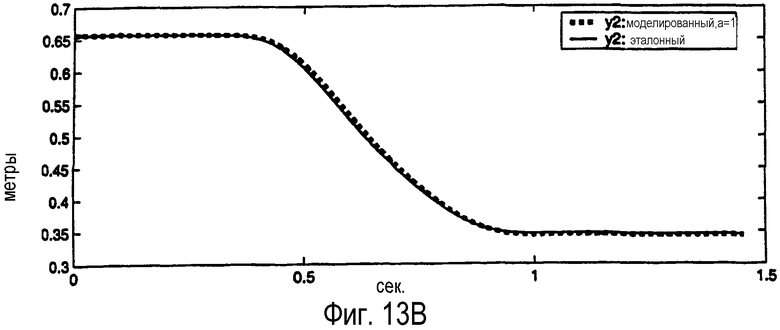
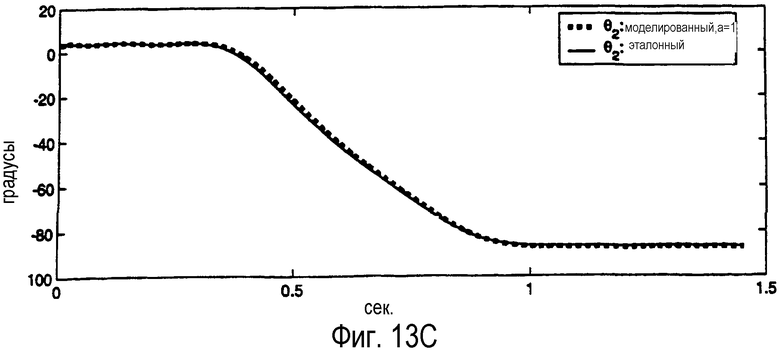
фиг.13А-13С изображают графики, иллюстрирующие точность слежения для смещения коленного сустава по фиг.7 с использованием малых коэффициентов обратной связи и с учетом ускорений,
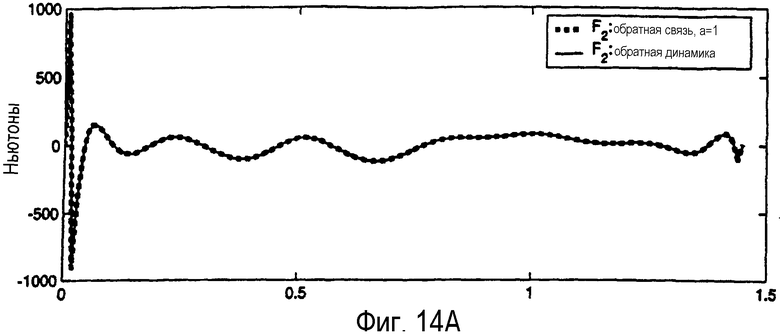
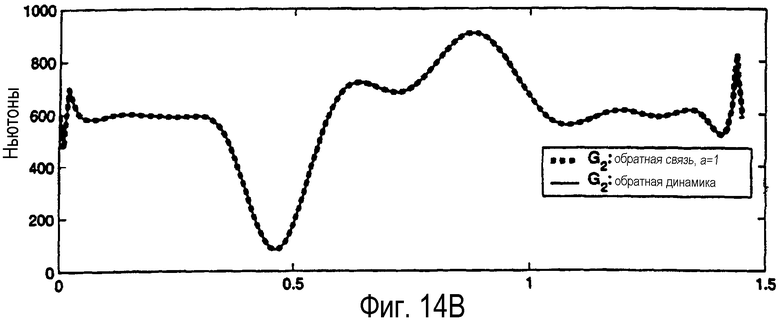
фиг.14А-14С изображают графики, иллюстрирующие точность слежения для сил и моментов коленного сустава по фиг.7 с использованием малых коэффициентов обратной связи и с учетом ускорений,
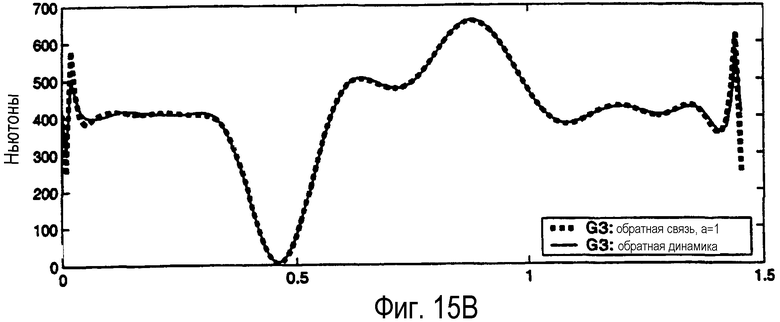
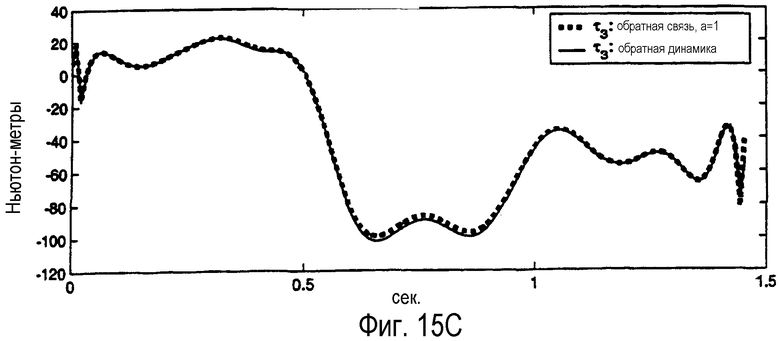
фиг.15А-15С изображают графики, иллюстрирующие точность слежения для сил и моментов тазобедренного сустава по фиг.7 с использованием малых коэффициентов обратной связи и с учетом ускорений,
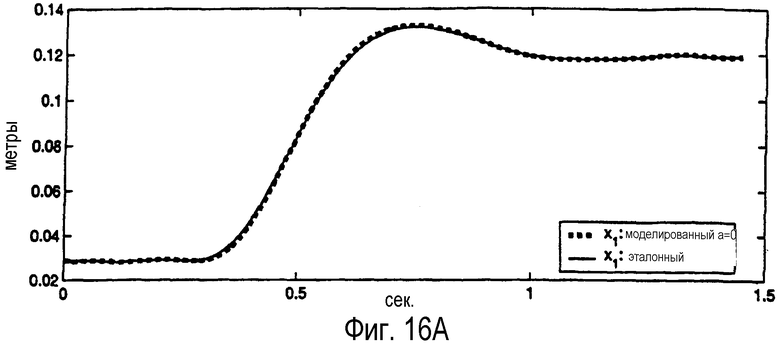
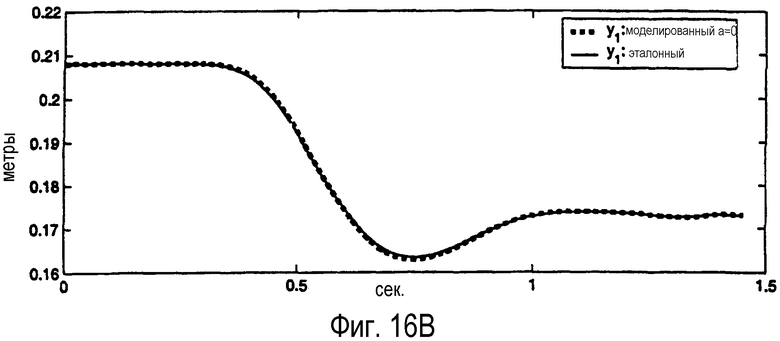
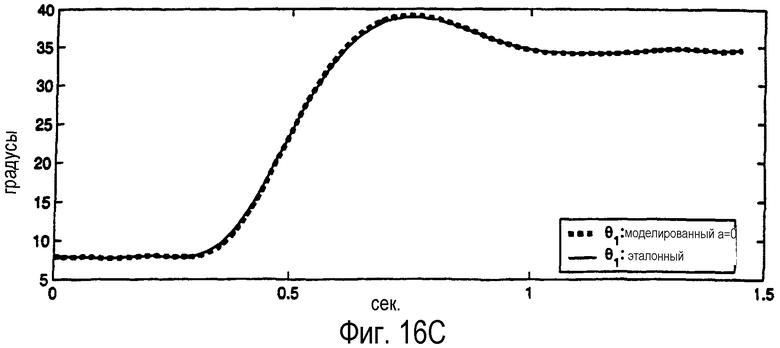
фиг.16А-16С изображают графики, иллюстрирующие точность слежения для смещения голеностопного сустава по фиг.7 с использованием больших коэффициентов обратной связи и без учета ускорений,
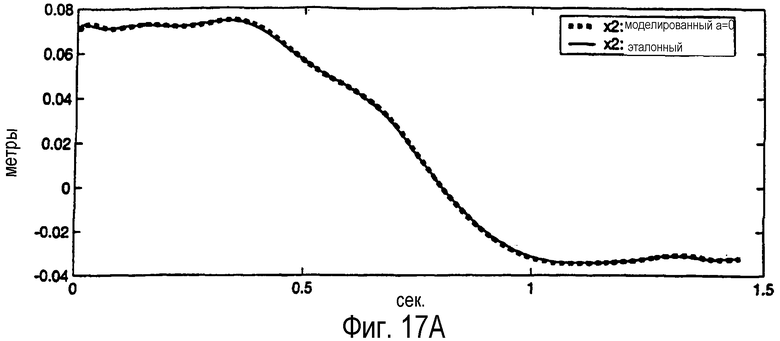
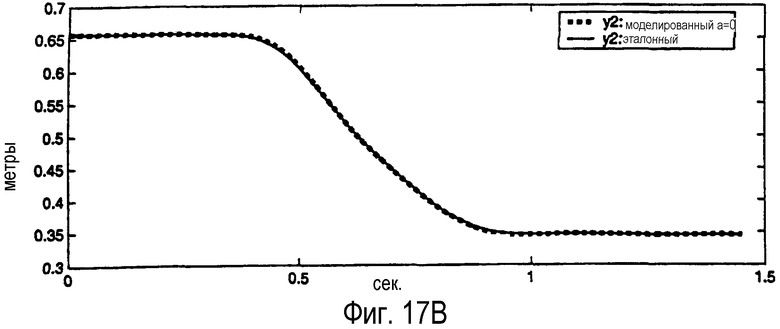
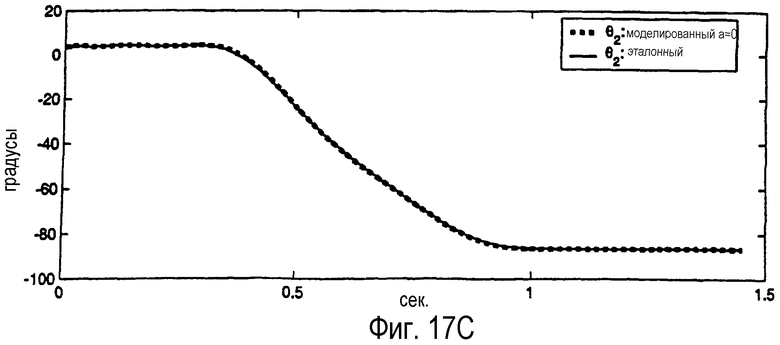
фиг.17А-17С изображают графики, иллюстрирующие точность слежения для смещения коленного сустава по фиг.7 с использованием больших коэффициентов обратной связи и без учета ускорений,
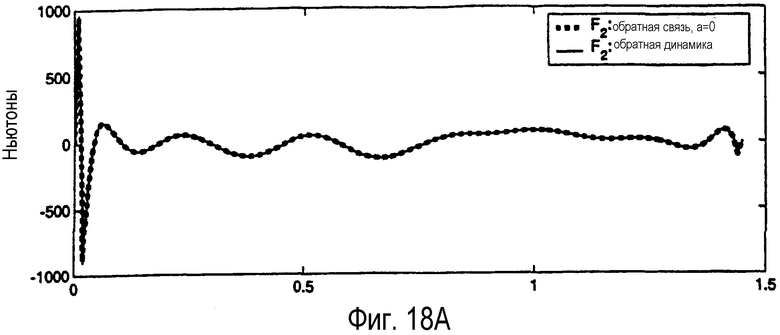
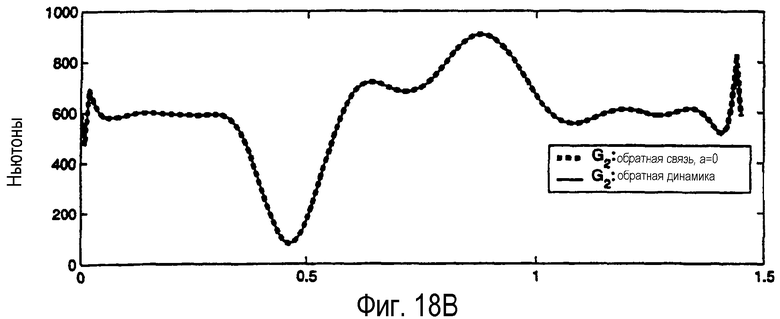
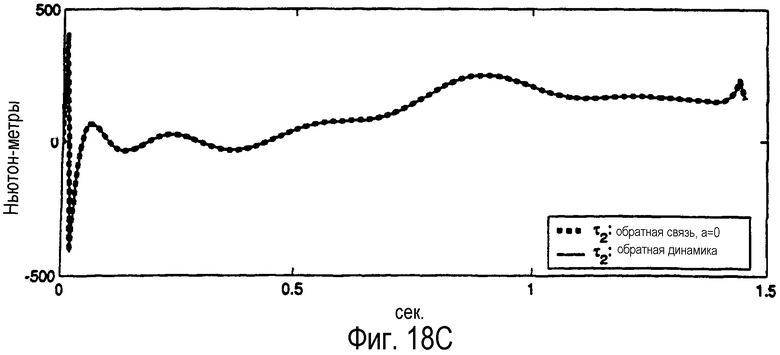
фиг.18А-18С изображают графики, иллюстрирующие точность слежения для сил и моментов коленного сустава по фиг.7 с использованием больших коэффициентов обратной связи и без учета ускорений,
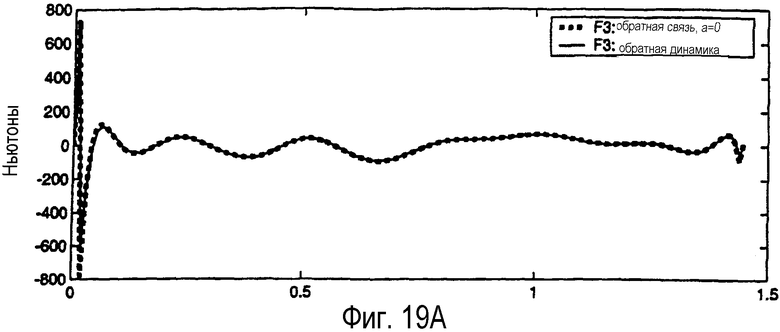
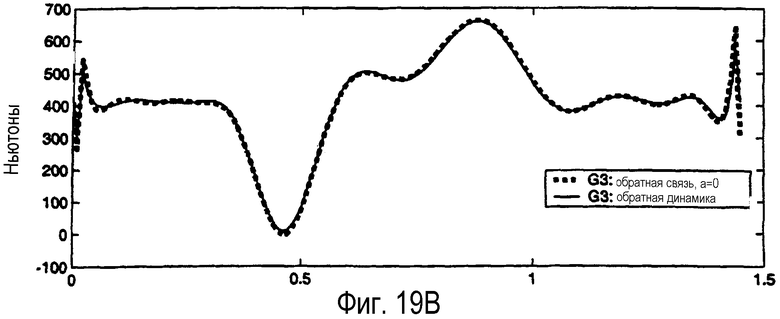
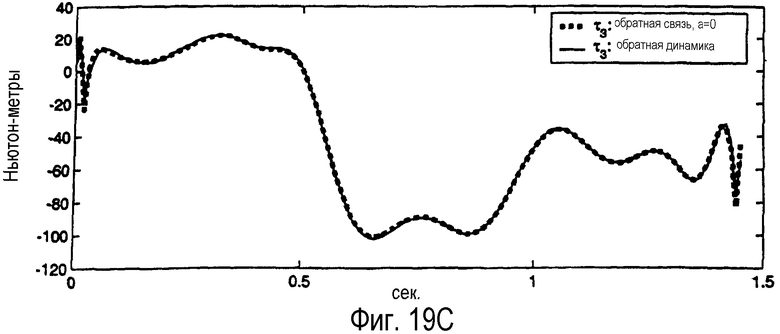
фиг.19А-19С изображают графики, иллюстрирующие точность слежения для сил и моментов тазобедренного сустава по фиг.7 с использованием больших коэффициентов обратной связи и без учета ускорений,
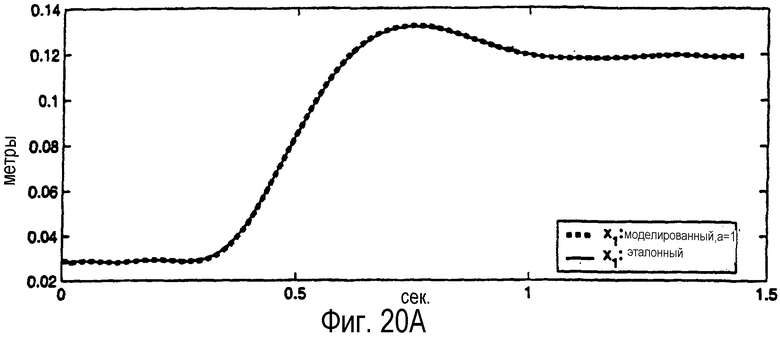
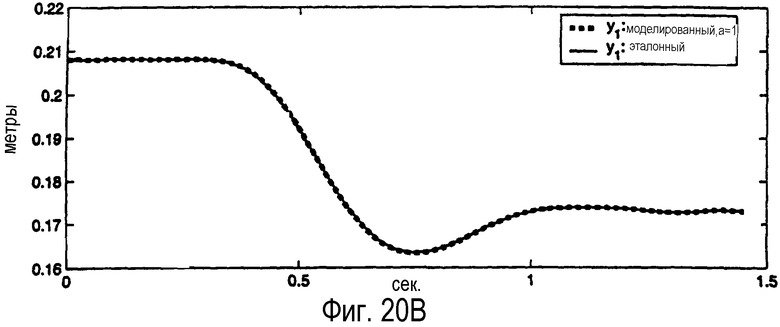
фиг.20А-20С изображают графики, иллюстрирующие точность слежения для смещения голеностопного сустава по фиг.7 с использованием больших коэффициентов обратной связи и с учетом ускорений,
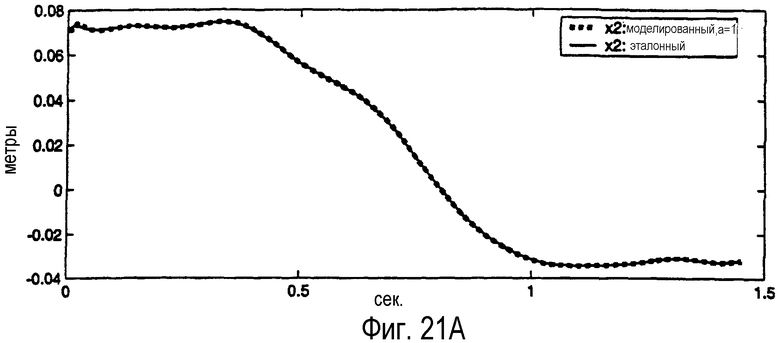
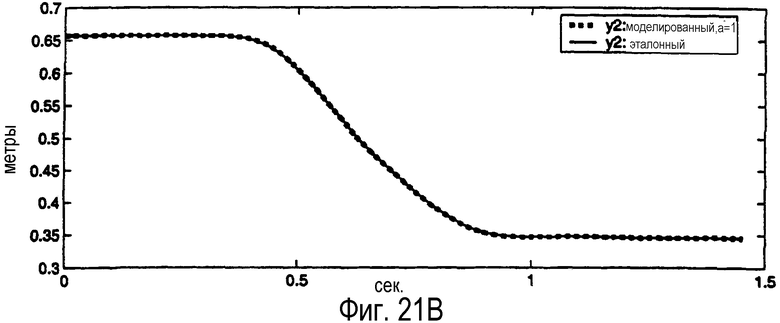
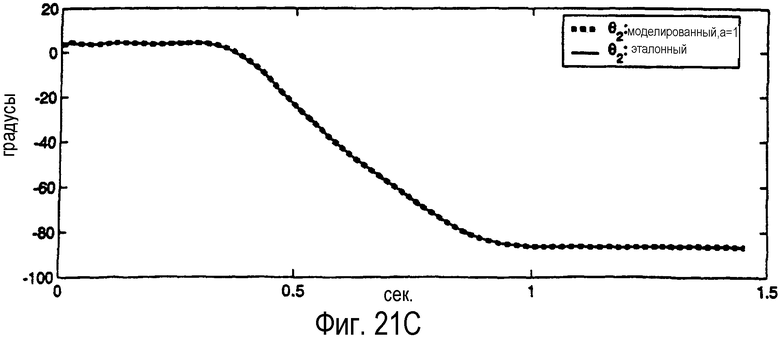
фиг.21А-21С изображают графики, иллюстрирующие точность слежения для смещения коленного сустава по фиг.7 с использованием больших коэффициентов обратной связи и с учетом ускорений,
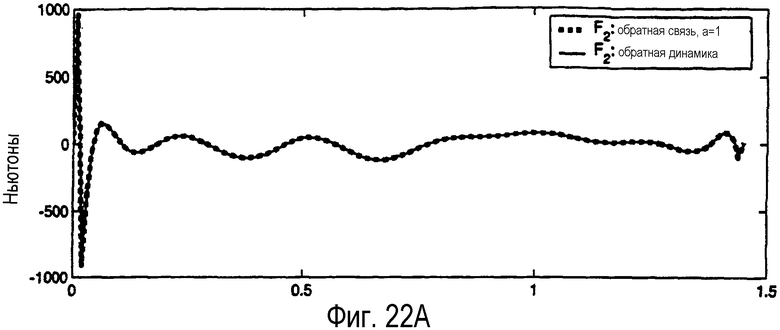
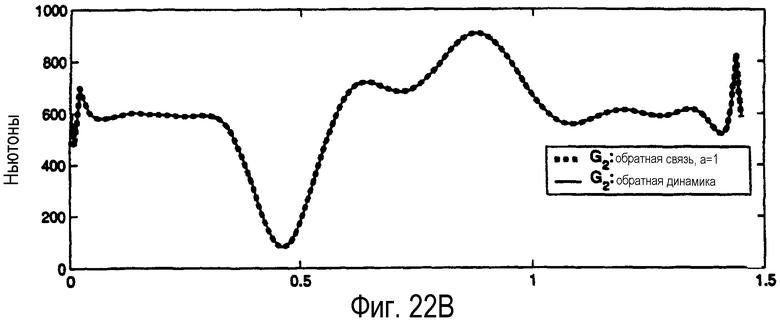
фиг.22А-22С изображают графики, иллюстрирующие точность слежения для сил и моментов коленного сустава по фиг.7 с использованием больших коэффициентов обратной связи и с учетом ускорений,
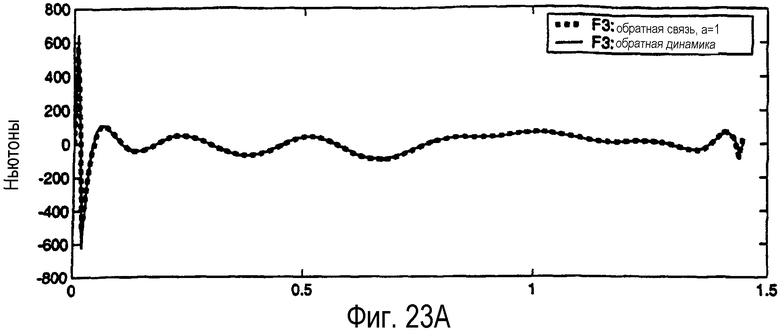
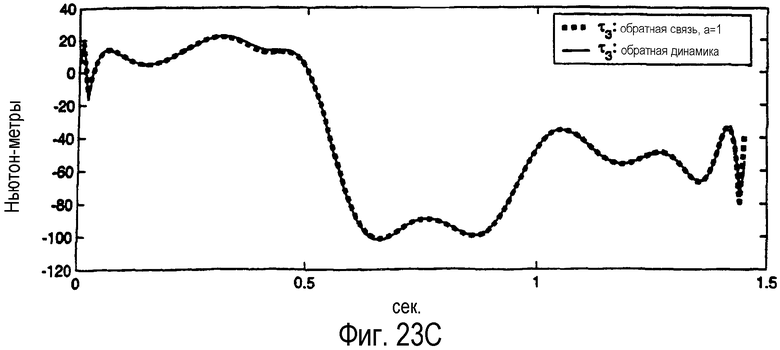
фиг.23А-23С изображают графики, иллюстрирующие точность слежения для сил и моментов тазобедренного сустава по фиг.7 с использованием больших коэффициентов обратной связи и с учетом ускорений,
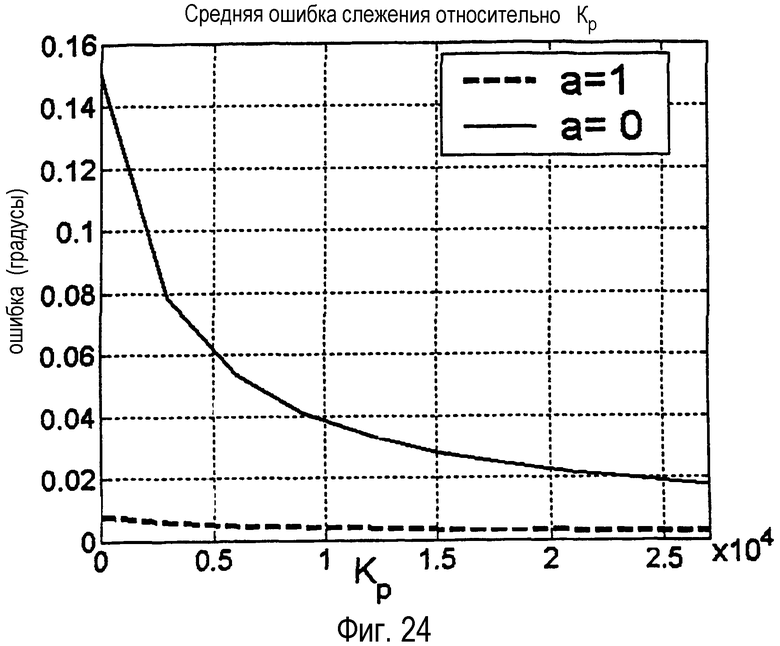
фиг.24 изображает график, иллюстрирующий погрешность для смещения голеностопного сустава на фиг.7.
Описание предпочтительных вариантов осуществления изобретения
Ниже описаны предпочтительные варианты осуществления настоящего изобретения со ссылками на прилагаемые чертежи, на которых одинаковыми ссылочными номерами обозначены идентичные или функционально подобные элементы. Кроме того, левая цифра каждого ссылочного номера на фигурах соответствует фигуре, на которой этот номер использовался впервые.
На фиг.1 представлена иллюстрация, изображающая, как рекурсивные вычисления используются для отделения динамики нижней части тела от динамики верхней части тела. Иллюстрация изображает верхнюю часть 105 тела и нижнюю часть 110 тела. Один сегмент верхней части 105 тела показан с грузом 140. Нижняя часть 110 тела содержит сегменты, имеющие голеностопный сустав 120, коленный сустав 125 и тазобедренный сустав 130. При рекурсивном методе для вычисления сил и моментов суставов верхнюю часть 105 тела можно моделировать отдельно от нижней части 110 тела. Начиная с сил 115 противодействия основания (реакции опоры), можно эффективно изолировать суставы 120, 125 и 130 нижней части 110 тела, а также связанные с ними параметры сегментов связи от верхней части 105 тела. Это значит, что внутренние силы и моменты, действующие на суставы 120, 125 и 130, можно оценивать без учета эффектов, обусловленных нагрузкой 140 и физическими параметрами верхней части 106 тела, такими как масса, центр массы, инерция и длина сегмента. Эти параметрические неопределенности верхней части 105 тела являются важными источниками погрешностей при оценке внутренних сил и моментов в теле человека, когда используются процедуры динамики всего тела в замкнутой форме. В отличие от решения в замкнутой форме для всего тела, в вариантах рекурсивного решения используются измерения сил 115 реакции опоры в качестве ограничений для рекурсивного вычисления моментов суставов, начиная от основания (опоры) и продвигаясь вверх, например, к коленному суставу 125 и тазобедренному суставу 130.
Использование рекурсивного метода для оценки сил и моментов суставов позволяет сфокусировать внимание на интересующих суставах без введения дополнительных источников погрешности. Кроме того, рекурсивный метод с измерением сил 115 реакции опоры в качестве входных данных обеспечивает, например, дополнительную модальность измерения. То есть объединение информации о кинематике и силе реакции дает дополнительную возможность повышения надежности полученных оценок внутренних сил. Человек может подвергаться воздействию непредсказуемых нагрузок или ограничений динамики в результате взаимодействия с другими объектами или другими людьми в окружающей среде. Такие обстоятельства могут изменить динамическое представление, необходимое для оценки внутренних сил и моментов в суставах. Некоторые применения для использования рекурсивного метода в этих обстоятельствах включают в себя биомеханические исследования задач подъема и разработку управления вспомогательными устройствами, которые помогают людям с ограниченными физическими возможностями в выполнении их повседневных задач. Специалистам понятно, что для обеспечения дополнительных модальностей восприятия, предназначенных для использования при оценке различных сил и моментов, могут служить датчики силы и давления, встроенные в обувь.
А. Рекурсивный метод для двухмерной системы с последовательной цепью
Варианты настоящего изобретения применимы к плоскостным системам, включающим рекурсивную незамкнутую цепь и рекурсивную замкнутую цепь. В системе с незамкнутой цепью максимум один конец системы, состоящей из множества тел, находится в контакте с окружающей средой. Другой конец или концы свободны или не ограничены. В системе с замкнутой цепью более одного конца контактирует с окружающей средой.
На фиг.2 показана схема сил свободного тела, действующих на сегменты в плоскостной последовательно связанной системе с незамкнутой цепью. Система включает в себя первый сегмент 205, второй сегмент 210 и n-ый сегмент 215. Сегменты 205, 210 и 215 связаны шарнирными соединениями (поворотными суставами). Каждый из сегментов 205, 210 и 215 проиллюстрирован в виде схемы свободного тела, на которой сегменты соединены первым суставом 220 (шарниром), вторым суставом 222 (шарниром), третьим суставом 224 (шарниром) и n-ым суставом 226 (шарниром). Первый сегмент 205 включает в себя первый сустав 220 и второй сустав 222. Второй сегмент 210 включает в себя второй сустав 222 и третий сустав 224. В частности, сегменты 205 и 210 соединены следующим образом: второй сустав 222 соединяет первый сегмент 205 со вторым сегментом 210. Таким образом, последовательная цепь из n сегментов образована за счет соединения n сегментов общим или перекрывающимся суставом.
Для каждого из суставов 220, 222, 224 и 226 показаны моменты вращения суставов, горизонтальные силы реакции и вертикальные силы реакции каждого сустава, которые обозначены как τI, Fi и Gi, соответственно. Например, для первого сустава 220 проиллюстрированы момент вращения τI, горизонтальная сила реакции Fi и вертикальная сила реакция Gi. Ниже описан пример рекурсивного вычисления со ссылкой на фиг.2. При рекурсивном вычислении система из множества тел концептуально делится на отдельные сегменты. Анализируется схема свободного тела каждого сегмента. Сегменты соединены между собой суставами (шарнирами), например вторым суставом 222. Силы реакции и моменты, например на втором суставе 222, являются общими для первого сегмента 205 и второго сегмента 210. Анализ начинается с первого сегмента 205, при этом вычисляются сила и момент в точке присоединения второго сегмента 210, т.е. на втором суставе 222 (шарнире). Вычисленные силы и момент на втором суставе 222 являются результатом рекурсии 1. Этот результат используется в качестве входных данных для анализа следующего сегмента, например второго сегмента 210. Рекурсивный анализ сегментов продолжается до тех пор, пока не будет достигнут n-ый сегмент 215. Этот n-ый сегмент 215 является представляющим интерес сегментом или сегментом, на котором желательно остановить рекурсивное вычисление. В варианте, где на первый сегмент 205 действуют силы 115 реакции опоры (фиг.1), силы и момент, действующие на второй сустав 222, вычисляются на основе сил и момента, действующих на первый сустав 220. Затем вычисляются силы и момент, действующие на третий сустав 224, на основе ранее вычисленных сил и момента, действующих на второй сустав 222. Эта рекурсивная процедура использования результата динамических вычислений в качестве входных данных для следующего вычисления повторяется до тех пор, пока не будут найдены силы и моменты для представляющего интерес сустава или суставов. Специалисту понятно, что n-ый сегмент 215 не обязательно является последним сегментом в системе из множества тел. Скорее, под n-ым сегментом подразумевается сегмент, на котором желательно остановить рекурсивное вычисление, потому что уже будут найдены интересующие силы и моменты. Следует также отметить, что силы 115 реакции опоры действуют в точке контакта, которая не обязательно находится на суставе. Дополнительные детали этих вычислений будут описаны ниже со ссылкой на фиг.3.
На фиг.3 показана схема свободного тела для одного сегмента в последовательно связанной системе. Сегмент 305 представляет собой i-ый сегмент плоскостной последовательно связанной системы, например системы, проиллюстрированной на фиг.2. Сегмент i тела включает сустав i (310) и сустав i+1 (315). Для изолированного сегмента i, где i =1...n, ускорение центра масс обозначено как ( ), угол сустава относительно вертикали - θi и угловое ускорение -
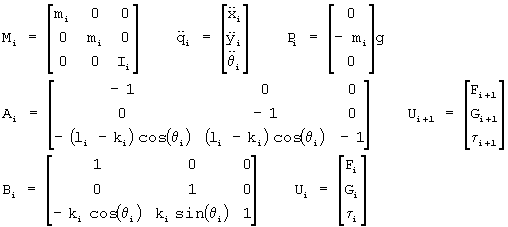
), угол сустава относительно вертикали - θi и угловое ускорение -  . Как показано на фиг.3, физические параметры для сегмента i тела включают в себя: массу mi, момент инерции Ii, длину Li сегмента и длину ki до центра масс. Также на фиг.3 для каждого сустава 310 и 315 показаны моменты вращения τi суставов, горизонтальные силы Fi реакции и вертикальные силы Gi реакции. Далее представлены уравнения Ньютона-Эйлера для вычисления сил и моментов на каждом из суставов 310 и 315 сегмента i тела в уравнениях 1, 2 и 3.
. Как показано на фиг.3, физические параметры для сегмента i тела включают в себя: массу mi, момент инерции Ii, длину Li сегмента и длину ki до центра масс. Также на фиг.3 для каждого сустава 310 и 315 показаны моменты вращения τi суставов, горизонтальные силы Fi реакции и вертикальные силы Gi реакции. Далее представлены уравнения Ньютона-Эйлера для вычисления сил и моментов на каждом из суставов 310 и 315 сегмента i тела в уравнениях 1, 2 и 3.

Специалистам понятно, что уравнение 1 является выражением для сложения сил, действующих на сегмент 305 тела в проекции на ось х, или горизонтальном направлении. Аналогично, уравнение 2 является выражением для сложения сил, действующих на сегмент тела 305 в проекции на ось у, или вертикальном направлении. В уравнении (2) g обозначает ускорение свободного падения. Уравнение 3 является выражением для сложения угловых ускорений, действующих на суставы 310 и 315.
1. Методика обратной динамики
При анализе обратной динамики силы и моменты, действующие на суставы, вычисляются из измеренных или желательных кинематических данных. Кинематические данные включают в себя координаты центра масс и данные угла сустава. В одном варианте осуществления настоящего изобретения рекурсивное решение для вычисления сил и моментов на каждом суставе можно получить из компактного представления (в форме матрицы) уравнений Ньютона-Эйлера в виде уравнения 4, показанного ниже. В уравнении (4) Ui=[Fi Gi τI]T - вектор (транспонированный), элементы которого соответствуют горизонтальной силе, вертикальной силе и моменту, соответственно, действующим на сустав i (310). Силы и момент на суставе i+1 (315) описаны как Ui+1. Другие детали рекурсивного решения для Ui и Ui+1 будут описаны ниже.

Вектор qi=[xi yθI]T представляет координаты центра масс и угол сустава для сустава i. Специалистам понятно, что член  в уравнении 4 представляет вторую производную вектора qi. Элементы уравнения 4 более подробно определены следующим образом:
в уравнении 4 представляет вторую производную вектора qi. Элементы уравнения 4 более подробно определены следующим образом:
2. Оценка с незамкнутой цепью
Как было описано выше, система с незамкнутой цепью имеет один конец, контактирующий с окружающей средой. Конец, контактирующий с окружающей средой, называется "ограниченный конец". В одном варианте настоящего изобретения ограниченным концом являются ноги человека, контактирующие с основанием или другой опорной поверхностью. В одном варианте кинематические данные дополняются измерениями сил 115 реакции опоры (обозначенных как U1) для повышения точности оценок силы инерции и момента. Сегменты пронумерованы в направлении вверх от основания, от 1 до n, где n - последний рассматриваемый сегмент. Таким образом, в методике обратной динамики Ньютона-Эйлера используются измерения сил и моментов под ногами. При U1, используемом в качестве граничного условия на сегменте 1, сила и момент на сегменте i, где i имеет значение от 1 до n (i:1→n), вычисляются последовательно с помощью уравнения 5, начиная с сегмента 1 и продвигаясь к сегменту n. При оценке с незамкнутой цепью, где n является последним сегментом в цепи, отсутствуют внешние силы, действующие на n, так что Un+1=0.

Поскольку в биомеханической модели имеют место шум и погрешности в измерениях, граничное условие на свободном сегменте обычно нарушается. Иными словами, в варианте с (незамкнутой) цепью, где рекурсия идет от сегмента 1 к свободному сегменту (обозначенному как n), Un+1 не равно 0. Эта избыточная детерминированность разрешается путем добавления остаточных сил и моментов вращения к сегменту n. Преимущество рекурсивной формулировки с нумерацией сегментов от 1 до n состоит в том, что нет необходимости моделировать все тело. Оценка силы и момента заканчивается на сегменте n независимо от того, является ли он последним сегментом данной последовательной системы, или нет. Параметрические неопределенности для верхних конечностей и неопределенности в модели жесткого тела являются важными источниками ошибок в оценке внутренних сил и моментов. Однако этих неопределенностей верхних конечностей можно избежать, когда требуются моменты только суставов, ближайших к плоскости силы.
В другом варианте с незамкнутой цепью доступны только кинематические измерения. Сегменты нумеруются от 1 до n, где сегмент 1 имеет свободный конец, а не ограниченный конец. Так как сегмент 1 имеет свободный конец, U1=0 является граничным условием для рекурсии по направлению к сегменту n.
3. Оценка с замкнутой цепью
В другом варианте настоящего изобретения выполняется оценка с замкнутой цепью. Как было описано выше, система с замкнутой цепью имеет более одного конца, контактирующего с окружающей средой. В этом варианте осуществления для оценки внутренних сил и моментов необходимы измерения датчиков или другие исходные силы. Сегменты нумеруются последовательно, от сегмента 1 до сегмента n, который является последним представляющим интерес сегментом. Данные измерения для датчика или исходная сила на сегменте 1 обозначается как U1, где U1≠0, потому что конец сегмента 1 ограничен. При измерениях U1, доступных в качестве граничного условия на сегменте 1, сила и момент на сегменте i, где i имеет значение от 1 до n (i:1→n), вычисляются последовательно с помощью уравнения 5, начиная с сегмента 1 и продвигаясь к сегменту n.
В. Обратное решение с использованием нелинейной обратной связи
На фиг.4 представлена структурная схема системы слежения для сегмента i тела. Контроллер 405 коррекции ошибок, модуль 410 обратной динамики и модуль 415 прямой динамики соединены между собой и образуют систему слежения. Вводные данные для контроллера 405 коррекции ошибок включают в себя кинематические данные  ,
,  и
и  а также переменные qi и
а также переменные qi и  состояния. В одном варианте требуются измеренные или желательные кинематические данные () и оценки их скоростей (
состояния. В одном варианте требуются измеренные или желательные кинематические данные () и оценки их скоростей ( ). Оценки ускорения (
). Оценки ускорения ( ) можно использовать в применениях, не содержащих шума, однако они не являются необходимыми. Контроллер 405 коррекции ошибок выдает модифицированное ускорение
) можно использовать в применениях, не содержащих шума, однако они не являются необходимыми. Контроллер 405 коррекции ошибок выдает модифицированное ускорение  ° в качестве входных данных для модуля 410 обратной динамики. Модуль 410 обратной динамики имеет дополнительные входы Ui и qi. Вектор Ui представляет силы и момент на суставе i. Выходные данные модуля 410 обратной динамики представляют оценки Ui+1 силы и момента для сустава i+1. Входные данные в модуль 415 прямой динамики 415 включают в себя Ui, Ui+1 и qi. Кроме того, оцененные сила и момент Ui+1 сустава используется в качестве входных данных во время следующей итерации, где они обозначаются как Ui для приращенного i. В каждом случае итерации или рекурсии Ui является входными данными, а Ui+1 - результатом. Модуль 415 прямой динамики выдает переменные qi и
° в качестве входных данных для модуля 410 обратной динамики. Модуль 410 обратной динамики имеет дополнительные входы Ui и qi. Вектор Ui представляет силы и момент на суставе i. Выходные данные модуля 410 обратной динамики представляют оценки Ui+1 силы и момента для сустава i+1. Входные данные в модуль 415 прямой динамики 415 включают в себя Ui, Ui+1 и qi. Кроме того, оцененные сила и момент Ui+1 сустава используется в качестве входных данных во время следующей итерации, где они обозначаются как Ui для приращенного i. В каждом случае итерации или рекурсии Ui является входными данными, а Ui+1 - результатом. Модуль 415 прямой динамики выдает переменные qi и  состояния. Параметры для модуля прямой динамики (т.е. Ai, Mi, Bi и Pi) идентичны параметрам для обратной динамики.
состояния. Параметры для модуля прямой динамики (т.е. Ai, Mi, Bi и Pi) идентичны параметрам для обратной динамики.
В одном варианте осуществления изобретения силы и моменты суставов оцениваются с использованием модуля 410 обратной динамики. Уравнение 6 представляет закон управления обратной динамикой для рекурсивного вычисления данных нагрузки на сустав для Ui+1 с использованием модифицированного ускорения °. Модуль 415 прямой динамики вычисляет ускорения согласно уравнению 7 и затем осуществляет численное интегрирование ускорений для получения переменных qi и  состояния, связанных с суставом i. Контроллер 405 коррекции ошибок использует обратную связь по переменным qi и состояния для формирования модифицированного ускорения
состояния, связанных с суставом i. Контроллер 405 коррекции ошибок использует обратную связь по переменным qi и состояния для формирования модифицированного ускорения  В одном варианте осуществления изобретения модифицированное ускорение
В одном варианте осуществления изобретения модифицированное ускорение  является значением, вычисленным без учета второй производной измеренных или желательных данных кинематики. Контроллер 405 коррекции ошибок формирует член модифицированного ускорения
является значением, вычисленным без учета второй производной измеренных или желательных данных кинематики. Контроллер 405 коррекции ошибок формирует член модифицированного ускорения  таким образом, что модуль 410 обратной динамики вычисляет набор входных данных или управляющих данных, обозначенных как Ui+1, которые при вводе в модуль 415 прямой динамики последовательно воспроизводят или отслеживают измеренные или желательные данные кинематики.
таким образом, что модуль 410 обратной динамики вычисляет набор входных данных или управляющих данных, обозначенных как Ui+1, которые при вводе в модуль 415 прямой динамики последовательно воспроизводят или отслеживают измеренные или желательные данные кинематики.

Модуль 414 прямой динамики выполняет моделирование для нахождения переменных qi и состояния на основании вычисленных сил и момента. В частности, модуль 415 прямой динамики осуществляет численное интегрирование уравнения 7 для нахождения векторов положения и скорости, которые соответствуют поступившим данным Ui+1 нагрузки на сустав. В одном варианте численное интегрирование выполняют с помощью функции интегрирования, предусмотренной в программном продукте MATLAB компании MathWorks, Inc., Natick, Massachusetts. Специалистам понятно, что это интегрирование можно выполнять многими методами, например методами Рунге-Кутта. Переменные qi и состояния вводятся в контроллер 405 коррекции ошибки, который вычисляет модифицированное ускорение ° для текущего шага времени. Начиная с исходных условий qi (0) и продолжая до конечной точки, контроллер 405 коррекции ошибок сводит к нулю ошибку слежения между моделированными и измеренными (или желательными) кинематическими данными.

Специалистам понятно, что описанные уравнения, выражения, модули или функции можно реализовать в универсальном компьютере, специализированном компьютере или аппаратными средствами. В одном варианте изобретения существенные признаки изобретения реализуются универсальным компьютером, которые программируется специальным программным продуктом. Это программный продукт предпочтительно распространяется на машиночитаемом носителе, который включает в себя программные команды. Машиночитаемым носителем может быть, например, том считываемой памяти. Данные тома считываемой памяти можно получать через вычислительную сеть общего пользования, персональную вычислительную сеть или Интернет. Понятно, что программные команды могут быть реализованы в любой соответствующей форме, например, как исходный код, объектный код или код сценариев.
На фиг.5 представлена структурная схема системы слежения для сегмента i, иллюстрирующая дополнительные детали контроллера коррекции ошибок. В проиллюстрированном варианте осуществления контроллер 405 коррекции ошибок содержит модули, которые реализуют уравнение 8, где параметр Kpi представляет позиционный коэффициент обратной связи, а параметр Kvi - коэффициент обратной связи по скорости. Модуль 510 разности предназначен для формирования значения ei ошибки (определенного в уравнении 12) и значения  ошибки производной из кинематических данных, полученных в результате моделирования и измеренных (или желательных) кинематических данных. В контроллере 405 коррекции ошибок значение ei ошибки умножается на позиционный коэффициент Kpi обратной связи, а значение
ошибки производной из кинематических данных, полученных в результате моделирования и измеренных (или желательных) кинематических данных. В контроллере 405 коррекции ошибок значение ei ошибки умножается на позиционный коэффициент Kpi обратной связи, а значение  ошибки производной умножается на коэффициент Kvi обратной связи по скорости для формирования модифицированного ускорения °. Параметры Kpi и Kvi определяются в уравнениях 9 и 10 как постоянные диагональные матрицы, которые управляют уравнениями 1, 2 и 3.
ошибки производной умножается на коэффициент Kvi обратной связи по скорости для формирования модифицированного ускорения °. Параметры Kpi и Kvi определяются в уравнениях 9 и 10 как постоянные диагональные матрицы, которые управляют уравнениями 1, 2 и 3.

Для изучения эффекта включения ускорений (a=1) и исключения ускорений (a=0) во время моделирования добавлен параметр a. Специалистам понятно, что когда параметр a устанавливается равным нулю, вторая производная кинематических данных, член оценки ускорения  , не учитывается в уравнении 8. Следовательно, в любом случае в системе слежения используется только модифицированное ускорение
, не учитывается в уравнении 8. Следовательно, в любом случае в системе слежения используется только модифицированное ускорение  °. Преимущество неиспользования второй производной кинематических данных с наличием шума состоит в повышенной точности оценки силы и момента.
°. Преимущество неиспользования второй производной кинематических данных с наличием шума состоит в повышенной точности оценки силы и момента.
На фиг.6 представлен алгоритм, иллюстрирующий рекурсивный процесс слежения. Первоначальное значение i равно 1 для последовательно связанной системы с интересующим сегментом n. Как было описано выше, n является последним интересующим сегментом, т.е. точкой остановки рекурсии. Процесс начинается с этапа 605. Измеренные или желательные кинематические данные для сегмента i получают на этапе 610. Как описывалось выше, сегмент i имеет суставы (шарниры), обозначенные как i и i+1. Затем на этапе 615 вычисляется модифицированное ускорение ° на суставе i с использованием варианта структуры обратной связи, описанного выше. Анализ обратной динамики выполняется на этапе 620 для получения и сил и момента на суставе i+1. В случае рекурсии, где i=1, сила реакции/момент на суставе 1 вводятся на этапе 620 как U1. В других случаях рекурсии, где i≠1 и i+1<n, информация о нагрузке на сустав для сустава i+1 (представленная как конкатенированный вектор Ui+1) подается в качестве входных данных U1 для следующего сегмента в другом случае рекурсии. Ui+1 вводится на этапе 625 в анализ прямой динамики для получения моделированных кинематических данных на суставе i. На этапе 630 определяется, требуется ли дополнительная рекурсия. Если i+1 равно n, то управление передается на этап 635, на котором рекурсия заканчивается, в противном случае значение i увеличивается на 1 на этапе 640 и управление возвращается на этап 605, на котором другой случай рекурсии выполняет процесс слежения для следующего сегмента тела.
С. Прямое прогнозирование новых движений
В одном варианте осуществления настоящего изобретения моделирование динамического уравнения движения, обеспечиваемое модулем прямой динамики, можно использовать для прогнозирования новых движений. Моделированные кинематические данные представляют данные сегментального положения и скорости из оцененной нагрузки на сустав (включая силы и моменты). Таким образом, модуль прямой динамики можно выполнить с возможностью моделирования новых движений сегментов тела в ответ на приложенные силы и моменты.
Можно изменять различные параметры в прямой модели и наблюдать воздействие на моделированную реакцию. Например, изменение таких параметров сегмента, как масса, инерция, длина и центр массы в модуле 415 прямой динамики влияет на кинематическую реакцию. Этот тип возможности прогнозирования позволяет изучать чувствительность модуля 415 прямой динамики к физическим параметрам.
D. Динамика ошибок
Проблема оценки момента вращения и силы суставов описана в одном варианте изобретения как система слежения, использующая закон управления с нелинейной обратной связью согласно уравнению 6. Для демонстрации осуществления слежения целесообразно рассмотреть динамику ошибок с замкнутым циклом. На фиг.5 результат Ui+1 модуля обратной динамики представляет закон управления по уравнению 6. Если этот закон управления ввести в модуль прямой динамики (путем подстановки в уравнение 4), получается соотношение для замкнутого цикла согласно уравнению 11. Уравнение 12 определяет ei как ошибку между измеренными кинематическими данными qmi и моделированной переменной qi состояния, которая получена в результате интегрирования в модуле 415 прямой динамики. Ниже описана динамика ошибок для нескольких сценариев.


С учетом ускорений: a=1
В идеальной ситуации с точными измерениями и нулевой ошибкой в численном дифференцировании динамики ошибок в замкнутом цикле определены дифференциальным уравнением 13.

Динамику ошибок переменной qi состояния можно контролировать независимо посредством присвоения собственного значения. Пусть λ1 и λ2 обозначают собственные значения уравнения 13. Уравнение 14 обеспечивает критически убывающее решение, т.е. без синусоидальных осцилляций, с действительными и равными собственными значениями. Это решение дает самый быстрый и точный ответ.

В уравнении 15 приведено соотношение между Kp и Kv для достижения критически убывающего ответа.

В одном варианте правильное время слежения и вычисления можно обеспечить с помощью собственных значений, имеющих значение 100. Ниже будут описаны со ссылками на фиг.8-23 результаты моделирования как с большими, так и с малыми коэффициентами обратной связи.
2. Без учета ускорений: а=0
Предположим, что ускорения, оцениваемые по измеренным кинематическим данным, не учитываются, т.е. а=0. Динамика ошибок при замкнутом цикле выражается неоднородным дифференциальным уравнением 16.

Хотя решение уравнения 16 содержит вынуждающий член, допуская, что член ускорения  ограничен, ошибка сводится к нулю за счет присвоения собственным значениям в уравнении 16 отрицательной и вещественной части. Как и ранее, в случае с учетом ускорений, можно соответственно предусмотреть коэффициенты обратной связи для критически убывающего ответа с использованием отношения, данного в уравнении 15.
ограничен, ошибка сводится к нулю за счет присвоения собственным значениям в уравнении 16 отрицательной и вещественной части. Как и ранее, в случае с учетом ускорений, можно соответственно предусмотреть коэффициенты обратной связи для критически убывающего ответа с использованием отношения, данного в уравнении 15.
3. Введение ошибки оценки производной
В приведенных выше формулировках уравнений для ошибок предполагается, что член производной  и член ускорения
и член ускорения  можно точно вычислить путем дифференцирования кинематических данных. Действительно, ошибки численного дифференцирования содержащих шум кинематических измерений нельзя проигнорировать и они учитываются в следующих формулах.
можно точно вычислить путем дифференцирования кинематических данных. Действительно, ошибки численного дифференцирования содержащих шум кинематических измерений нельзя проигнорировать и они учитываются в следующих формулах.
Пусть ευ и εη представляют ограниченную ошибку в вычислениях скорости и ускорения. Оценки  и
и  выражены в уравнении 17:
выражены в уравнении 17:
Динамика с замкнутым циклом, включающая ошибку оценки производной, дана в уравнении 18.

Подставив уравнение 17 в уравнение 18, получаем следующее уравнение 19.

Динамика ошибок для а=0 и а=1 дана в уравнениях 20 и 21.

Е. Динамика системы с замкнутой формой
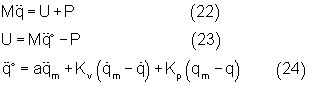
В следующем варианте осуществления систему отслеживания можно применить для динамики с замкнутой формой. Уравнения системы с замкнутой формой для системы неограниченного жесткого тела описаны числом n дифференциальных уравнений в матричной форме уравнения 22. В уравнении 22 М соответствует матрице массы, а Р соответствует вкладам, обусловленным членами силы Кориолиса, центробежной силы и силы тяжести, соответственно. Входные значения U соответствуют чистым моментам вращения сустава. Подобно описанным рекурсивным вариантам, закон управления по уравнению 23 используется для линеаризации и разделения динамики системы. Член ° уравнения 23 определен в уравнении 24, в котором Kp и Kv являются диагональными матрицами n×n, имеющими критически убывающий отклик.
F. Моделирование плоскостной системы с открытой цепью
На фиг.7 представлена схема свободного тела, иллюстрирующая двухмерную систему с открытой цепью, содержащую три сегмента. Эти три сегмента включают в себя голень 705, бедро 710 и туловище 715 человека. Предполагается, что сустав 710 шарнирно сочленен с основанием. Коленный сустав 725 соединяет голень 705 и бедро 710. Тазобедренный сустав 730 соединяет бедро 710 и туловище 715. Моделирование демонстрирует осуществление одного варианта системы слежения для оценки сил и моментов суставов. Выбранные параметры системы типичны для среднего мужчины ростом 1,7 м и весом 74 кг. Рассматриваемое моделируемое движение представляет собой движение приседания в голеностопном, коленном и тазобедренном суставах 720, 725 и 730. Целью является использование U1 в качестве ограничения для инициализации рекурсии и для итерационного вычисления U2=[F2G2τ2] и U3=[F3G3τ3]. Требуемый вектор моментов и сил суставов обозначен как U=[u1u2u3]T. Для выработки эталонных траекторий используется зарегистрированное движение среднего мужчины, осуществляющего приседание. Специалистам понятно, как можно зафиксировать и зарегистрировать движение с использованием обычных методов. Уравнения Ньютона-Эйлера для движения каждого изолированного сегмента тела описаны в следующих уравнениях 25-33.
1. Сегмент 1: Голень 705
2. Сегмент 2: Бедро 710
3. Сегмент 3: Туловище 715
Моделирование предназначено для сравнения работы системы отслеживания с традиционным подходом обратной динамики. Входные данные включают в себя кинематические данные для движения, а также силы реакции опоры. В описанном моделировании работа системы отслеживания анализируется для двух случаев: с учетом оценок ускорения (а=1 на фиг.5) и без учета оценок ускорения (а=0 на фиг.5). Для обеспечения согласованности предполагается, что измерения реакции опоры идеальные и получены аналитически. Аналитически вычисленный вектор U1=[F1G1τ2] реакции опоры получают с помощью уравнений рекурсии, начиная от туловища 715 и продвигаясь по направлению к опоре, как было описано выше. При использовании U1 в качестве ограничения, рекурсивно оцениваются U2 и U3. Моделирование выполняется для двух различных наборов матриц коэффициентов обратной связи, которые дают критически убывающий отклик. Результаты моделирования показаны на фиг.8-23.
В моделировании, показанном на фиг.8-15, использованы небольшие значения коэффициентов обратной связи по уравнению 34. Для простоты иллюстрации эталонные данные смещения сустава сглажены. Как было описано выше, включение оценок ускорения часто является нежелательным, потому что анализ обратной динамики требует вычисления производных высшего порядка, что приводит к ошибочным результатам. Каждая пунктирная кривая на фиг.8-11 соответствует точности моделированного слежения, в котором не учитываются желательные ускорения (а=0). На обоих графиках на фиг.8 и 9 и на графиках силы и момента на фиг.10 и 11, без учета ускорений, моделированный результат с использованием малых коэффициентов обратной связи дает неудовлетворительные характеристики слежения. Как показано на фиг.12-15, при включении желательных ускорений (а=1) получаются исключительно хорошие характеристики слежения и оценки моментов суставов.
В отличие от фиг.8-11, модели на фиг.16-19 дают отличные характеристики слежения. В этих моделях коэффициенты обратной связи увеличены для улучшения результатов в случае, когда желательные ускорения не учитываются (а=0). Уравнения 35 и 36 дают параметры коэффициентов обратной связи. На обоих графиках смещения на фиг.16 и 17 и графиках силы и момента на фиг.18 и 19 пунктирные линии, представляющие точность моделированного слежения без учета оценок ускорения (а=0), практически не отличаются от эталонных данных. Как видно на чертежах, варианты оценки нелинейной обратной связи сил и моментов суставов эффективны и при этом не требуют, например, производных высшего порядка из содержащих шум измеренных данных.
На фиг.24 представлен график, иллюстрирующий ошибку слежения для смещения голеностопного сустава на фиг.7. Пунктирная линия на фигуре соответствует абсолютному значению средней ошибки слежения, когда учитываются желательные ускорения (а=1). Сплошная линия соответствует абсолютному значению средней ошибки слежения, когда оценки ускорения не учитываются (а=0). Для каждого из нескольких значений Kp была вычислена средняя ошибка слежения (в течение моделирования) между желательным и моделированным углом. Для каждой точки данных было вычислено абсолютное значение средней ошибки для построения графика. В проиллюстрированном случае, когда оценки ускорения (а=0) не учитываются, средняя ошибка слежения для смещения голеностопного сустава 720 сходит к нулю с увеличением значений Kp. Средние ошибки слежения для других углов и состояний не показаны специально, так как специалисту понятно, что при этом получаются аналогичные результаты.
Настоящее изобретения может быть реализовано во многих различных формах, и оно не должно рассматриваться как ограниченное описанными вариантами. Эти варианты представлены исключительно для тщательного и полного раскрытия изобретение, чтобы специалисты смогли получить полное представление о нем. Например, специалисту понятно, что описанные системы и способы слежения можно распространить на трехмерные системы. Кроме того, в модуль 415 прямой динамики (фиг.4) можно ввести, например, обычные методы распределения мышечного усилия. Результат модуля распределения мышечного усилия можно затем использовать для инициирования прямого моделирования. Альтернативно, модуль распределения мышечного усилия может использовать результат модуля 410 обратной динамики (фиг.4) и не использоваться при прямом моделировании.
Кроме того, предложенные устройство и способы не ограничены жесткими телами. Специалистам понятно, что принципы настоящего изобретения можно применить и к другим системам, которые можно охарактеризовать уравнением 22. Варианты оценки с использованием обратной связи отслеживают данные из систем, управляемых дифференциалом второго порядка набора данных.
Несмотря на описанные предпочтительные варианты оценки с использованием обратной связи сил и моментов суставов (которые являются иллюстративными и не ограничительными), следует отметить, что специалисты смогут предложить модификации и изменения на основании представленного раскрытия. Следовательно, в описанные конкретные варианты можно внести изменения, которые подпадают под объем притязаний изобретения, охарактеризованных в прилагаемой формуле изобретения и эквивалентах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО СЛЕДЯЩЕГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ АВТОМОБИЛЯ | 1999 |
|
RU2161814C1 |
| СИСТЕМА ПЕРЕДАЧИ, ТЕРМИНАЛЬНЫЙ БЛОК, КОДИРУЮЩЕЕ УСТРОЙСТВО, ДЕКОДИРУЮЩЕЕ УСТРОЙСТВО И АДАПТИВНЫЙ ФИЛЬТР | 1994 |
|
RU2138030C1 |
| СЛЕЖЕНИЕ ЗА ВЗГЛЯДОМ НА ОСНОВЕ АДАПТИВНОГО ГОМОГРАФИЧЕСКОГО СОПОСТАВЛЕНИЯ | 2015 |
|
RU2685020C2 |
| ВЫДЕЛЕНИЕ РЕСУРСОВ ДЛЯ МАШИННОГО ОБУЧЕНИЯ | 2013 |
|
RU2648573C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2272705C2 |
| ЭХОПОДАВЛЕНИЕ, СОДЕРЖАЩЕЕ МОДЕЛИРОВАНИЕ КОМПОНЕНТОВ ПОЗДНЕЙ РЕВЕРБЕРАЦИИ | 2011 |
|
RU2569006C2 |
| СПОСОБ УПРАВЛЕНИЯ ЗЕНИТНОЙ УПРАВЛЯЕМОЙ РАКЕТОЙ СРЕДНЕЙ ДАЛЬНОСТИ С АКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ ПРИ НАВЕДЕНИИ НА ГРУППОВУЮ СОСРЕДОТОЧЕННУЮ ЦЕЛЬ | 2012 |
|
RU2570115C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ | 2012 |
|
RU2518685C1 |
| ОПТИМАЛЬНЫЙ ДЕКОДЕР ПРОГРАММИРУЕМЫХ ВЫХОДНЫХ ДАННЫХ ДЛЯ РЕШЕТЧАТЫХ КОДОВ С КОНЕЧНОЙ ПОСЛЕДОВАТЕЛЬНОСТЬЮ БИТОВ | 1997 |
|
RU2179367C2 |
| МАР ДЕКОДЕР ЛОКАЛЬНОГО СТИРАНИЯ | 2004 |
|
RU2339161C2 |






Изобретение относится к анализу движений человека, в частности к анализу сил и моментов суставов. Способы определения нагрузки на сустав используют нелинейную обратную связь при прямом моделировании динамики. Модуль прямой динамики определяет моделированные кинематические данные. Контроллер коррекции ошибок сводит к нулю ошибку слежения между моделированными кинематическими данными и измеренными кинематическими данными. Он вырабатывает модифицированное ускорение для ввода в модуль обратной динамики. Приведено выполнение устройства и машиночитаемый носитель, позволяющие осуществлять определение оцененной нагрузки на сустав. Изобретение обеспечивает повышений точности получаемых данных. 4 н. и 32 з.п. ф-лы, 24 ил.
Приоритет по пунктам:
| Burdea G | |||
| et all/ Virtual reality technology | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| СПОСОБ ОТСЛЕЖИВАНИЯ И ОТОБРАЖЕНИЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ПОЛЬЗОВАТЕЛЯ В ПРОСТРАНСТВЕ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1996 |
|
RU2107328C1 |
| US 4786847 A, 22.11.1988. | |||

