Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к способу оценки сил реакции опоры (пола), действующих на ноги двуногого шагающего движущегося тела, например человека или двуногого шагающего робота, и дополнительно относится к способу оценки моментов, действующих на суставы ног двуногого шагающего движущегося тела, благодаря использованию расчетных значений сил реакции опоры.
Предпосылки для создания настоящего изобретения
Например, при осуществлении оперативного управления устройства для содействия ходьбе, содействующего движениям ходьбы человека, или управления движениями движущегося двуногого шагающего робота, становится необходимым последовательное определение сил реакции опоры, действующих на ноги (в частности, сил, действующих на части ног, касающиеся грунта, от опоры (пола)) человека или двуногого шагающего робота. Благодаря определению сил реакции опоры становится возможным определение моментов или аналогичных воздействий, действующих на суставы ног двуногого шагающего движущегося тела, и на основе полученных моментов или аналогичных воздействий становится возможным определение требуемых сил устройства, необходимых для содействия ходьбе, или требуемых вращающих моментов для соответствующих суставов двуногого шагающего робота или аналогичного устройство.
Методика определения вышеупомянутых сил реакции опоры известна и описана, например, в публикации №2000-249570 нерассмотренной выложенной патентной заявки. В соответствии с этой методикой форма, имея в виду то, что форма волны временного изменения силы реакции опоры на каждую ногу периодически изменяется в течение постоянной ходьбы двуногого шагающего движущегося тела, сила реакции опоры на каждую ногу воспринимается как комплексная величина (линейная комбинация) множества тригонометрических функций, имеющих взаимно различные периоды, составляющие 1/n (n=1, 2,...) периода ходьбы. В этом случае в качестве весового коэффициента каждой тригонометрической функции при комбинировании множества тригонометрических функций использовали задаваемое значение, определяемое заранее для двуногого шагающего движущегося тела, или значение, получаемое благодаря ее регулировке в зависимости от географических и геометрических особенностей местности.
Однако, несмотря на то что вышеуказанная методология помогает в определении сил реакции опоры, действующих на ноги в отношении одного шага или множества шагов двуногого шагающего движущегося тела, если ходьба двуногого шагающего движущегося тела последовательно изменяется, то трудно точно определить силы реакции опоры. Кроме того, для увеличения точности определения сил реакции опоры необходимо установить вышеуказанные весовые коэффициенты тригонометрических функций на двуногое шагающее движущееся тело, или отрегулировать их в зависимости от географических и геометрических особенностей местности или аналогичных факторов. Таким образом, трудно определить силы реакции опоры с уменьшением влияния окружающей среды на движение двуногого шагающего движущегося тела или с различием в индивидуальности двуногого шагающего движущегося тела.
Например, в случае двуногого шагающего робота, известен один, в котором к лодыжкам или ступням соответствующих ног прикрепляют датчики силы, например шестиосные датчики силы, и силы реакции опоры получают благодаря выходным сигналам этих датчиков силы. Кроме того, известна также методология ходьбы двуногого шагающего движущегося тела на плите пуансона, помещенной на опору (пол), и определение сил реакции опоры с помощью выходных сигналов плиты пуансона.
Однако методология, в которой используют датчики силы, имеет недостаток, заключающийся в том, что при определении сил реакции опоры на ноги, в частности, человека, поскольку датчики силы должны быть прикреплены к лодыжкам или ступням человека, датчики силы становятся препятствующими для ходьбы в обычной среде существования. Кроме того, при использовании плиты пуансона силы реакции опоры могут быть только определены в среде, где расположена плита пуансона.
Настоящее изобретение было разработано ввиду недостатков предшествующего уровня техники, и его задачей было обеспечение способа оценки сил реакции опоры, который обеспечивает возможность точного определения сил реакции опоры в реальном масштабе времени с помощью относительно простой методики, и который пригоден для определения сил реакции опоры по отношению, в частности, к человеку как двуногому шагающему движущемуся телу.
Кроме того, задачей настоящего изобретения является обеспечение способа оценки моментов суставов двуногого шагающего движущегося тела, который обеспечивает возможность точного определения в реальном масштабе времени моментов, действующих на суставы, например коленные суставы ног, благодаря использованию расчетных значений сил реакции опоры.
Сущность настоящего изобретения
В начале будет дано объяснение основных принципов способа, соответствующего настоящему изобретению, оценки силы реакции опоры двуногого шагающего движущегося тела.
В качестве состояний движения ног двуногого шагающего движущегося тела, например, в качестве состояний движения ног при ходьбе, имеется состояние одного положения (касания), в котором, как иллюстрируется на фиг.1(а), только одна нога 2 (нога на передней стороне в направлении движения, иллюстрируемом на чертеже) обеих ног 2,2 двуногого шагающего движущегося тела 1 касается грунта, и состояние двух положений (касания), в которых обе ноги 2,2 касаются грунта, как показано на фиг.1(b).
В этом случае, прежде всего, в вышеуказанном состоянии одного положения, уравнение движения для центра тяжести (в частности, уравнение поступательного перемещения центра тяжести) двуногого шагающего движущегося тела в абсолютной системе координат, зафиксированной относительно грунта, на котором двуногое шагающее движущееся тело движется, дано выражением зависимости, в котором произведение ускорения центра тяжести и массы двуногого шагающего движущегося тела равно результирующей силе тяжести, действующей на центр тяжести (= масса двуногого шагающего движущегося тела × ускорение силы тяжести), и силе реакции опоры, действующей из опоры на касающуюся грунта часть ноги, касающейся грунта. В частности, как, например, показано на фиг.1(а), в абсолютной системе Cf координат, зафиксированной относительно опоры А, дано, что составляющими ускорения а центра G0 тяжести двуногого шагающего движущегося тела 1 в направлении оси Х (горизонтальное направление в направлении движения вперед двуного шагающего движущегося тела 1) и направлении оси Z (вертикальное направление) являются составляющие ах и az, соответственно, а составляющими силы F реакции опоры, действующей на ногу 2 (нога 2 на опорной стороне ноги), касающуюся грунта, в направлении оси Х и в направлении оси Z являются составляющие Fx и Fz, соответственно, а уравнение движения для центра G0 тяжести представляет собой следующее уравнение (1):

(в котором M - масса двуногого шагающего движущегося тела, a g - ускорение силы тяжести).
Заключенные в скобки части T(,) на обеих сторонах в уравнении (1) представляют двухкомпонентные векторы. В приведенном описании обозначение в виде T(,) представляет вектор.
Таким образом, если определяют ускорение а=T(ах, az) центра G0 тяжести двуногого шагающего движущегося тела 1, то расчетное значение силы F=(Fx, Fz) реакции опоры может быть получено с помощью следующего уравнения (2) при использовании ускорения а, величины массы М двуногого шагающего движущегося тела 1 и величины ускорения g силы тяжести.

В этом случае масса М, необходимая для получения расчетного значения силы F реакции опоры, может быть определена заранее посредством измерения или аналогичным образом. Кроме того, что касается положения центра G0 тяжести и ускорения а, то их можно определить последовательно в соответствии с известной методикой, в которой используют выходные сигналы датчиков, например датчиков для определения улов сгибания (углов поворота) соответствующих суставов двуногого шагающего движущегося тела 1, измерителя ускорения, гиродатчики и так далее, как будет подробно описано позднее.
Затем, уравнение движения для центра тяжести (в частности, уравнение перемещения центра тяжести) двуногого шагающего движущегося тела в вышеуказанном состоянии касания грунта обеими ногами дается выражением зависимости, в котором произведение ускорения центра тяжести и массы двуногого шагающего движущегося тела равно результирующей силе тяжести, действующей на центр тяжести (= масса двуногого шагающего движущегося тела × ускорение силы тяжести), и силам реакции опоры, действующим из опоры на соответствующие касающиеся грунта части обеих ног (две силы реакции опоры, соответствующие обеим ногам, соответственно). В частности, как показано на фиг.1(b), что, если координатными составляющими Х и Z силы Ft реакции опоры на ногу 2 на передней стороне в направлении движения вперед двуногого шагающего движущегося тела 1 являются Ffx и Ffz, а координатными составляющими Х и Z силы Fr реакции опоры на ногу 2 на задней стороне являются Frx и Frz, соответственно, то уравнение (2) движения центра G0 тяжести выражается следующим уравнением (3):

Значения ax, az, M и g в уравнении (3) описаны выше.
С другой стороны, в соответствии со знаниями авторов настоящей заявки, в состоянии двух положений силы Ff,Fr реакции опоры, действующие на ноги 2, 2 соответственно, могут, как представляется, действовать из конкретных частей 12f, 12r (например, лодыжек) в окрестности нижних концевых частей соответствующих ног 2,2 к центру G0 тяжести двуногого шагающего движущегося тела 1, как показано на фиг.1(b). После этого устанавливают выражение некоторой зависимости между положением конкретной части 12f, 12r ноги 2 относительно центра G0 тяжести и силой Ff, Fr реакции опоры, действующей на ногу 2, то есть выражение зависимости, представляющее зависимость, в которой направление сегмента, соединяющегося между центром G0 тяжести и конкретной частью 12f, 12r ноги 2 (направление радиус-вектора конкретной части 12f, 12r относительно центра G0 тяжести) аналогично направлению силы Ff, Fr реакции опоры, относящейся к ноге 2.
В частности, как следует из фиг.1(b), дано, что координатами положения центра G0 тяжести в вышеупомянутой абсолютной системе Cf координат являются координаты Xg, Zg, координатами положения конкретной части 12f ноги 2 передней стороны являются координаты Xf, Zf, а координатами положения конкретной части 12r ноги 2 задней стороны являются координаты Xr, Zr, при этом вышеупомянутые выражения зависимости принимают вид уравнений (4).

После этого из этих уравнений (4) и вышеупомянутого уравнения (3) получают следующие уравнения (5).
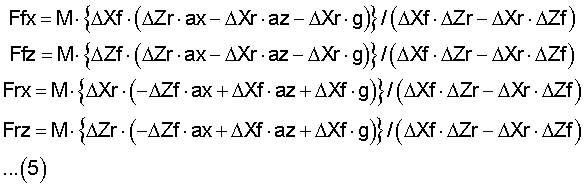
(в которых ΔZf=Xf-Xg, ΔZf=Zf-Zg, ΔXr=Xr-Xg, ΔZr=Zr-Zg)
Таким образом, если определяют ускорение а=T(ах, az) центра G0 тяжести двуногого шагающего движущегося тела 1 и определяют положения (они выражены ΔXf, ΔZf, ΔXr и ΔZr в уравнениях (5)) конкретных частей 12f, 12r, соответственно, ног 2,2 относительно центра G0 тяжести двуногого шагающего движущегося тела 1, то расчетные значения сил Ff=T(Ffx, Ffz), Fr=T(Frx, Frz) реакции опоры, действующие на соответствующие ноги 2,2, могут быть получены с помощью вышеупомянутых уравнений (5) при использовании значения массы M и значения ускорения силы тяжести g двуногого шагающего движущегося тела 1 и определенного ускорения и положения конкретных частей 12f, 12r.
В этом случае масса М, необходимая для получения расчетных значений сил Ff, Fr реакции опоры, может быть определена заранее посредством измерения или аналогичным образом. Что касается ускорения центра G0 тяжести, то положение центра G0 тяжести и положения конкретных частей 12f, 12r относительно центра G0 тяжести, хотя детали будут описаны позднее, можно определить последовательно с помощью известной методологии или аналогичным способом при использовании выходных сигналов датчиков, детектирующих углы сгибания (углы поворота) соответствующих суставов двуногого шагающего движущегося тела 1, измерителей ускорения, гиродатчиков и так далее.
Далее настоящее изобретение будет описано на основе того, что было объяснено выше. Для решения вышеупомянутых задач способ оценки силы реакции опоры для двуногого шагающего движущегося тела в соответствии с настоящим изобретением, то есть способ оценки силы реакции опоры, действующей на каждую ногу двуногого шагающего движущегося тела, предусматривает первый этап оценки того, является ли состояние движения ног указанного двуногого шагающего движущегося тела состоянием одного положения, в котором только одна из ног касается грунта, или состоянием двух положений, в котором обе ноги касаются грунта; второй этап, в течение которого последовательно определяют положения центра тяжести указанного двуногого шагающего движущегося тела и последовательно определяют ускорения указанного центра тяжести в абсолютной системе координат относительно грунта путем использования данных временного ряда положений указанного центра тяжести; и третий этап, в течение которого определяют положения конкретной части относительно указанного центра тяжести, по меньшей мере, в указанном состоянии двух положений, причем указанная конкретная часть предварительно определена в окрестности нижней концевой части каждой ноги. В таком случае способ оценки силы реакции опоры, соответствующий настоящему изобретению, отличается тем, что дополнительно предусматривает этап получения расчетных значений указанной силы реакции опоры, действующей на ногу, касающуюся грунта, последовательно, в состоянии одного положения указанного двуногого шагающего движущегося тела на основе уравнения движения для указанного центра тяжести, выражаемого с помощью массы и ускорения силы тяжести двуногого шагающего движущегося тела, ускорения указанного центра тяжести и указанной силы реакции опоры, действующей на ногу, касающуюся грунта; и этап получения расчетных значений указанных сил реакции опоры, соответственно действующих на обе ноги, последовательно, в состоянии двух положений указанного двуногого шагающего движущегося тела на основе уравнения движения для указанного центра тяжести, выраженного с помощью массы и ускорения силы тяжести двуногого шагающего движущегося тела, ускорения указанного центра тяжести и указанных сил реакций опоры, соответственно действующих на обе ноги, и выражения зависимости между положением указанной конкретной части каждой ноги относительно указанного центра тяжести и указанной силой реакции опоры, действующей на указанную ногу, причем указанную зависимость определяют на основе допущения, что указанная сила реакции опоры, действующая на каждую ногу, действует из указанной конкретной части указанной ноги к указанному центру тяжести.
В соответствии с настоящим изобретением, как описано выше, на вышеупомянутом первом этапе оценивают, является ли состояние движения ног двуногого шагающего движущегося тела состоянием одного положения или состоянием двух положений, и расчетные значения вышеупомянутых сил реакции опоры получают с помощью методик, зависящих от соответствующих опорных состояний. В частности, в состоянии одного положения двуногого шагающего движущегося тела расчетное значение вышеупомянутой силы реакции опоры, действующей на ногу, касающуюся грунта, получают из значений массы, ускорения силы тяжести и ускорения центра тяжести двуногого шагающего движущегося тела (смотри уравнение (2)) на основе вышеупомянутого уравнения движения центра тяжести двуногого шагающего движущегося тела (смотри уравнение (1)).
С другой стороны, в состоянии двух положений двуногого шагающего движущегося тела расчетные значения сил реакции опоры, действующих на обе ноги, соответственно, получают из массы, ускорения силы тяжести и ускорения центра тяжести двуногого шагающего движущегося тела, и положения конкретной части каждой ноги относительно центра тяжести (смотри уравнение (5)) на основе вышеупомянутого уравнения движения для центра тяжести двуногого шагающего движущегося тела (смотри уравнение (3)) и выражения зависимости (уравнение (4)) между положением конкретной части каждой ноги относительно вышеупомянутого центра тяжести и вышеупомянутой силой реакции опоры, действующей на ногу субъекта. Между прочим, в состоянии одного положения сила реакции опоры, действующая на свободную ногу (ногу, не касающуюся грунта), равна нулю.
В этом случае масса двуногого шагающего движущегося тела, необходимая для получения расчетного значения силы реакции опоры, может быть получена заранее путем измерения или аналогичным способом. Что касается положения центра тяжести и ускорения двуногого шагающего движущегося тела и положения конкретной части каждой ноги относительно центра тяжести, то представляется возможным определять их в реальном масштабе времени при использовании данных выходных сигналов датчиков, которые относительно малы по размеру и просты для крепления к двуногому шагающему движущемуся телу, например датчики (потенциометры или аналогичные приборы), детектирующие углы сгибания (углы поворота) соответствующих суставов двуногого шагающего движущегося тела, измерители ускорения, гиродатчики и так далее.
Таким образом, в соответствии со способом оценки силы реакции опоры, соответствующим настоящему изобретению, представляется возможным определять силы реакции опоры в реальном масштабе времени с помощью относительно простой методики без крепления датчиков силы к лодыжкам или ступням двуногого шагающего движущегося тела или использования плиты пуансона.
В способе оценки силы реакции опоры, соответствующем настоящему изобретению, как описано выше, предпочтительно, чтобы конкретной частью каждой ноги являлась лодыжка ноги. В соответствии с этим особенно увеличивается достоверность вышеупомянутого допущения в состоянии касания грунта обеими ногами. Таким образом, может быть увеличена точность не только расчетного значения силы реакции опоры в вышеупомянутом состоянии одного положения, но также расчетных значений сил реакции опоры в состоянии двух положений. То есть сила реакции опоры может быть точно оценена независимо от состояния движения ног.
Кроме того, способ оценки силы реакции опоры, соответствующий настоящему изобретению, предусматривает этап измерения ускорения в направлении вверх-вниз нижней части тела, поддерживаемой на обеих ногах через посредство тазобедренного сустава каждой ноги, причем указанная нижняя часть тела расположена вблизи указанных тазобедренных суставов, в котором на указанном первом этапе состояние движения указанного двуногого шагающего движущегося тела оценивают так, что, если ускорение указанной нижней части тела в направлении вверх-вниз увеличивается до заданного порогового значения или более, то начинается указанное состояние двух положений, тогда как состояние одного положения заканчивается, и, если расчетное значение указанной силы реакции опоры, действующей на ногу, которая собирается сделать отрыв (от поверхности грунта), уменьшается до заданного порогового значения или менее в указанном состоянии двух положений, то указанное состояние двух положений заканчивается, тогда как указанное состояние одного положения начинается.
В частности, при переходе состояния движения ног из состояния одного положения в состояние двух положений во время движения (во время ходьбы) двуногого шагающего движущегося тела приземление свободной ноги вызывает ускорение нижней части тела в направлении вверх-вниз (ускорение вверх), чтобы временно стать чрезвычайно большим. Такое явление нормально не возникает в другом состоянии движения ног. С другой стороны, при переходе состояния движения ног из состояния двух положений в состояние одного положения, операция отрыва (от поверхности грунта) одной из ног побуждает силу реакции опоры, действующую на эту ногу, уменьшаться до нуля. Таким образом, благодаря оценке состояния движения ног, как описано выше, может быть получено правильное суждение о том, находятся ли они в состоянии одного положения или в состоянии двух положений. Как результат, способ вычисления расчетного значения силы реакции опоры, который отличает состояние одного положения от состояния двух положений, может включаться при адекватной синхронизации, чтобы в соответствии с этим увеличивать точность расчетного значения силы реакции опоры. Ускорение в направлении вверх-вниз нижней части тела, необходимое для оценки состояния движения ног, может быть просто определено из выходных сигналов измерителя ускорения, например, благодаря креплению измерителя ускорения к нижней части тела.
Если вышеупомянутое тело, например, подобное телу человека, имеет талию, связанную с обеими ногами через посредство тазобедренных суставов, и грудную клетку, расположенную на талии так, чтобы свободно отклоняться относительно талии, то предпочтительно, чтобы подлежащее измерению ускорение в направлении вверх-вниз нижней части тела было ускорением талии в направлении вверх-вниз.
Кроме того, в способе оценки силы реакции опоры, соответствующем настоящему изобретению, различные методики рассматриваются в качестве методики определения положения центра тяжести двуногого шагающего движущегося тела и ускорения центра тяжести на вышеупомянутом втором этапе, и представляется возможным использовать различные известные методы. Однако предпочтительно определять положение центра тяжести и ускорение центра тяжести в соответствии со следующим способом.
В частности, способ предусматривает этап соответствующего измерения угла отклонения тела, поддерживаемого на обеих ногах через посредство тазобедренного сустава каждой ноги, углов сгибания, соответственно, по меньшей мере, тазобедренного сустава и коленного сустава каждой ноги и ускорения заданной опорной точки указанного двуногого шагающего движущегося тела в указанной абсолютной системе координат, в котором на указанном втором этапе на основе угла отклонения указанного тела, углов сгибания, соответственно, указанных тазобедренных суставов и указанных коленных суставов, модели связи жестких тел, образованной путем выражения указанного двуногого шагающего движущегося тела как связного тела из множества жестких тел, предварительно определенных масс соответствующих частей соответствующих жестких тел двуногого шагающего движущегося тела, соответствующих соответствующим жестким телам указанной модели связи жестких тел, и положений предварительно определенных центров тяжести соответствующих частей жесткого тела в соответствующих частях соответствующих жестких тел, последовательно определяют положения центра тяжести указанного двуногого шагающего движущегося тела относительно указанной опорной точки, ускорения указанного центра тяжести относительно указанной опорной точки последовательно определяют на основе данных временного ряда положений указанного центра тяжести, а ускорение указанного центра тяжести в указанной абсолютной системе координат получают из ускорения указанного центра тяжести относительно указанной опорной точки и ускорения указанной опорной точки в указанной абсолютной системе координат.
В частности, если опорная точка установлена для двуногого шагающего движущегося тела произвольно, то положение центра тяжести двуногого шагающего движущегося тела относительно опорной точки почти определяется взаимной постуральной зависимостью в теле бедра каждой ноги от тазобедренного сустава до коленного сустава и голени на нижней стороне ниже коленного сустава. Путем измерения угла отклонения тела и углов сгибания, соответственно, тазобедренных суставов и коленных суставов из этих данных измерения может быть определена такая постуральная зависимость. Кроме того, хотя детали будут описаны позднее, если предполагается, что вышеупомянутая модель связи жестких тел предназначена для моделирования двуногого шагающего движущегося тела (например, модель, рассматривающаяся в качестве жестких тел части (включая тело) на верхней стороне тазобедренных суставов обеих ног двуногого шагающего движущегося тела и бедра и голени каждой ноги), то положение центра тяжести двуногого шагающего движущегося тела относительно вышеупомянутой опорной точки может быть определено на основе масс соответствующих частей соответствующих жестких тел двуногого шагающего движущегося тела, положений центров тяжести соответствующих частей жесткого тела (в частности, положений соответствующих частей соответствующих жестких тел в системе координат, зафиксированной в соответствующих частях соответствующих жестких тел) и вышеупомянутой постуральной зависимости. Кроме того, ускорение центра тяжести относительно опорной точки может быть получено как дифференцированная величина второго порядка положения центра тяжести, которую определяют из данных временного ряда положений центра тяжести. Таким образом, путем измерения ускорения опорной точки в вышеупомянутой абсолютной системе координат ускорение центра тяжести двуногого шагающего движущегося тела может быть получено как суммарное (комплексное) ускорение ускорения центра тяжести относительно опорной точки и ускорения опорной точки.
В этом случае углы отклонения тела, необходимые для получения ускорения двуногого шагающего движущегося тела, как описано выше, могут быть получены из выходных сигналов измерителей ускорения и гиродатчиков или измерителей отклонения или аналогичных приборов, прикрепленных к телу, а углы сгибания тазобедренного сустава и коленного сустава каждой ноги могут быть получены из выходных сигналов датчиков, например потенциометров, прикрепленных к частям соответствующих суставов. Кроме того, ускорение опорной точки в абсолютной системе координат может быть получено из выходных сигналов датчиков, например измерителей ускорения, прикрепленных к части, образующей одно целое с опорной точкой. Кроме того, массы соответствующих частей соответствующих жестких тел двуногого шагающего движущегося тела и положения центров тяжести соответствующих частей жесткого тела в соответствующих частях жестких тел могут быть получены заранее посредством измерения или аналогичным образом.
Таким образом, становится возможным простое определение в реальном масштабе времени положения и ускорения центра тяжести двуногого шагающего движущегося тела без монтажа относительно больших датчиков и так далее на двуногое шагающее движущее тело.
При определении положения и ускорения центра тяжести двуногого шагающего движущегося тела предпочтительно, чтобы опорная точка была установлена на теле. В соответствии с этим датчики, например измерители ускорения, предназначенные для измерения ускорения опорной точки в абсолютной системе координат, могут быть смонтированы на теле и, таким образом, датчики, прикрепленные к ногам, могут быть уменьшены, чтобы в соответствии с этим сделать возможным предотвращение ситуации, в которой датчики начинают мешать движениям ходьбы двуногого шагающего движущегося тела.
С другой стороны, если тело, подобное телу человека, имеет талию, связанную с обеими ногами через посредство тазобедренных суставов, и грудную клетку, расположенную на талии так, чтобы отклоняться относительно талии, то предпочтительно, чтобы угол отклонения тела, используемый для определения положения центра тяжести, содержал углы отклонения талии и грудной клетки, соответственно. В частности, в этом случае предпочтительно, чтобы вышеупомянутая модель связи жестких тел была моделью, выражающей (представляющей) голень, расположенную на нижней стороне коленного сустава каждой ноги двуногого шагающего движущегося тела, бедро между коленным суставом и тазобедренным суставом, талию и верхнюю часть тела, расположенную на верхней стороне талии и включающую в себя грудную клетку, в качестве жестких тел, соответственно.
В соответствии с этим, особенно в том случае, если двуногое шагающее тело является человеком, то положение его центра тяжести и его ускорение могут быть точно определены, чтобы в соответствии с этим увеличить точность расчетных значений сил реакции опоры.
При определении положения центра тяжести двуногого шагающего движущегося тела относительно опорной точки на основе углов отклонения тела и так далее, как описано выше, положение конкретной части каждой ноги относительно центра тяжести двуногого шагающего движущегося тела может быть определено путем определения положения конкретной части относительно опорной точки на вышеупомянутом третьем этапе. В этом случае параметры, необходимые для определения положения конкретной части относительно опорной точки, отличаются в зависимости от установленного положения опорной точки. Например, если конкретной частью является лодыжка каждой ноги, а опорная точка установлена на теле, то можно определить положение конкретной части каждой ноги относительно опорной точки на основе угла отклонения тела (угла отклонения талии, если тело имеет талию и грудную клетку, а опорная точка установлена на талии), углов сгибания тазобедренного сустава и коленного сустава каждой ноги, и размеров (длин) бедра и голени каждой ноги.
В таком случае способ оценки момента для двуногого шагающего движущегося тела, соответствующий настоящему изобретению, представляет собой способ оценки момента, действующего, по меньшей мере, на один сустав каждой ноги двуногого шагающего движущегося тела, путем использования расчетных значений силы реакции опоры на каждую ногу, последовательно полученных с помощью вышеупомянутого способа оценки силы реакции опоры. В таком случае способ оценки момента, соответствующий настоящему изобретению, отличается тем, что предусматривает этап соответствующего измерения угла отклонения тела, поддерживаемого на обеих ногах, через посредство тазобедренного сустава каждой ноги, углов сгибания, соответственно, по меньшей мере, тазобедренного сустава и коленного сустава каждой ноги, и ускорения заданной опорной точки указанного двуногого шагающего движущегося тела в указанной абсолютной системе координат; этап последовательного определения углов отклонения соответствующих частей соответствующих жестких тел двуногого шагающего движущегося тела, корреспондирующихся с жесткими телами указанной модели связи жестких тел, на основе угла отклонения указанного тела, углов сгибания, соответственно, указанного тазобедренного сустава и указанного коленного сустава каждой ноги, и модели связи жестких тел, образованной путем выражения указанной двуногого шагающего движущегося тела как связного тела из множества жестких тел; этап последовательного определения положений центров тяжести соответствующих частей соответствующих жестких тел относительно указанной опорной точки на основе углов отклонения указанных соответствующих частей соответствующих жестких тел, предварительно определенных масс соответствующих частей соответствующих жестких тел и положений предварительно определенных центров тяжести соответствующих частей жестких тел в соответствующих частях соответствующих жестких тел, и последовательного определения ускорений центров тяжести соответствующих частей соответствующих жестких тел относительно указанной опорной точки на основе данных временного ряда положений центров тяжести соответствующих частей соответствующих жестких тел; этап последовательного определения ускорений центров тяжести соответствующих частей соответствующих жестких тел в указанной абсолютной системе координат из ускорений центров тяжести соответствующих частей соответствующих жестких тел относительно указанной опорной точки, и ускорений указанной опорной точки в указанной абсолютной системе координат; этап последовательного определения угловых скоростей соответствующих частей соответствующих жестких тел на основе данных временного ряда углов отклонения соответствующих частей соответствующих жестких тел; этап последовательного определения расчетных положений точки приложения силы реакции опоры каждой ноги в указанном двуногом шагающем движущемся теле на основе, по меньшей мере, угла отклонения бедра указанной ноги или угла сгибания коленного сустава указанной ноги в качестве соответствующих частей жесткого тела указанного двуногого шагающего движущегося тела; и этап оценки момента, действующего, по меньшей мере, на один из суставов каждой ноги указанного двуногого шагающего движущегося тела на основе модели обратной динамики при использовании расчетных значений указанной силы реакции опоры, расчетного положения указанной точки приложения силы реакции опоры, ускорений центров тяжести соответствующих частей соответствующих жестких тел и угловых скоростей указанных соответствующих частей соответствующих жестких тел в указанной абсолютной системе координат, углов отклонения соответствующих частей соответствующих жестких тел, предварительно определенных масс и размеров соответствующих частей соответствующих жестких тел, положений предварительно определенных центров тяжести соответствующих частей жесткого тела в соответствующих частях соответствующих жестких тел, и предварительно определенных моментов инерции соответствующих частей соответствующих жестких тел.
Если, как описано выше, второй этап в вышеупомянутом способе оценки силы реакции опоры предусматривает соответствующее измерение угла отклонения тела, то углы сгибания, соответственно, тазобедренного сустава и коленного сустава каждой ноги и ускорение опорной точки двуногого шагающего движущегося тела в абсолютной системе координат необходимо вновь измерить для определения положения центра тяжести двуногого шагающего движущегося тела относительно опорной точки и так далее. Кроме того, модель связи жестких тел может быть аналогичной модели связи жестких тел, используемой для определения положения центра тяжести двуногого шагающего движущегося тела и так далее.
В способе оценки момента, соответствующем настоящему изобретению, как описано выше, посредством измерения угла отклонения тела и углов сгибания тазобедренных суставов и коленных суставов, соответственно, можно получить из данных измерения углы отклонения соответствующих частей соответствующих жестких тел (они представляют взаимную постуральную зависимость соответствующих частей соответствующих жестких тел), например тела, бедер, голеней и так далее, двуногого шагающего движущегося тела. В таком случае, на основе масс соответствующих частей соответствующих жестких тел, положений центров тяжести соответствующих частей жесткого тела в соответствующих частях соответствующих жестких тел (в частности, положений соответствующих частей жесткого тела в системе координат, зафиксированной относительно соответствующих частей жестких тел) и углов отклонения соответствующих частей соответствующих жестких тел представляется возможным определить положения центров тяжести соответствующих частей соответствующих жестких тел относительно опорной точки. Кроме того, ускорение центра тяжести каждой соответствующей части жесткого тела относительно опорной точки получают как дифференцированную величину второго порядка положения центра тяжести, которое получают из данных временного ряда положений центра тяжести, таким образом, посредством измерения ускорения опорной точки в абсолютной системе координат, может быть получено ускорение центра тяжести каждой соответствующей части жесткого тела двуногого шагающего движущегося тела в абсолютной системе координат как комплексное (суммарное) ускорение ускорения центра тяжести относительно опорной точки и ускорения опорной точки (ускорения в абсолютной системе координат).
Кроме того, угловую скорость каждой соответствующей части жесткого тела получают как дифференцированную величину второго порядка угла отклонения, которую определяют из данных временного ряда углов отклонения каждой соответствующей части жесткого тела.
В соответствии со знаниями авторов этой заявки положение точки приложения силы реакции опоры каждой ноги в двуногом шагающем движущемся теле, например положение точки приложения силы реакции опоры каждой ноги относительно лодыжки ноги, имеет тесную корреляцию с углом отклонения бедра каждой ноги как соответствующей части жесткого тела двуногого шагающего движущегося тела, и углом сгибания коленного сустава каждой ноги. Таким образом, представляется возможным получение расчетного положения точки приложения силы реакции опоры в двуногом шагающем движущемся теле на основе, по меньшей мере, угла отклонения бедра каждой ноги и угла сгибания его коленного сустава.
В таком случае, если ускорения центров тяжести соответствующих частей соответствующих жестких тел двуногого шагающего движущегося тела, угловые скорости соответствующих частей соответствующих жестких тел и расчетное положение точки приложения силы реакции опоры получены так, как это описано выше, то представляется возможным оценить моменты, действующие на коленный сустав и тазобедренный сустав каждой ноги на основе известной, так называемой, модели обратной динамики при использовании тех данных и так далее вместе с расчетными значениями сил реакции опоры, полученных с помощью вышеупомянутого способа оценки силы реакции опоры. Короче говоря, методика, основанная на этой модели обратной динамики, использует уравнение движения для движения переноса центра тяжести соответствующей части каждого жесткого тела двуногого шагающего движущегося тела и уравнение движения для движения поворота соответствующей части жесткого тела (например, движение поворота вокруг центра тяжести соответствующей части жесткого тела) и дает возможность получения моментов, действующих на соответствующие суставы двуногого шагающего движущегося тела, соответствующие соответствующим суставам (соединениям) модели связи жестких тел, надлежащим образом от сустава, ближнего к точке приложения силы реакции опоры. Хотя детали будут описаны позднее, допуская, что, например, каждая нога является связным телом, имеющим бедро и голень в качестве соответствующих частей жесткого тела, соответственно, сила (сила реакции сустава), действующая на коленный сустав ноги, может быть получена путем применения ускорения центра тяжести голени, расчетного значения силы реакции опоры, действующей на ноги, и значения массы голени в уравнении движения для движения переноса центра тяжести голени каждой ноги. Кроме того, момент коленного сустава ноги может быть оценен путем применения силы реакции опоры, действующей на коленный сустав ноги, угловой скорости голени ноги, расчетного положения точки приложения силы реакции опоры ноги, расчетного значения силы реакции на ноги, значений данных, относящихся к положению центра тяжести голени в голени и размеру (длине) голени, значения момента инерции голени, значения угла отклонения голени в уравнении движения для движения поворота голени.
Кроме того, сила реакции сустава, действующая на тазобедренный сустав ноги, может быть получена путем применения ускорения центра тяжести бедра, силы реакции сустава, действующей на коленный сустав ноги, и значения массы бедра в уравнении движения переноса центра тяжести бедра. Кроме того, момент на тазобедренном суставе ноги, может быть оценен путем применения сил реакции сустава, соответственно действующих на коленный сустав и тазобедренный сустав ноги, угловой скорости бедра ноги, значений данных, относящихся к положению центра тяжести бедра в бедре и размеру (длине) бедра, и значения угла отклонения бедра в уравнении движения для движения поворота бедра.
В соответствии со способом оценки момента, соответствующим настоящему изобретению, как описано выше, путем оценки моментов, действующих на суставы ноги при использовании расчетных значений сил реакции опоры, полученных с помощью вышеупомянутого способа оценки силы реакции опоры, соответствующего настоящему изобретению, представляется возможным относительно просто оценить в реальном масштабе времени моменты, действующие на суставы ноги без крепления относительно больших датчиков и так далее к двуногому шагающему движущемуся телу.
Краткое описание чертежей
Фиг.1 - схематическое изображение, приведенное для объяснения основного принципа способа оценки силы реакции опоры, соответствующего настоящему изобретению.
Фиг.2 - схематическая иллюстрация человека как двуногого шагающего движущегося тела и состава приборов, прикрепленных к человеку, в одном варианте осуществления настоящего изобретения.
Фиг.3 - блок-схема, приведенная для объяснения функций арифметического процессора, предусматриваемого в приборах, иллюстрируемых на фиг.2.
Фиг.4 - схема, иллюстрирующая модель связи жестких тел, используемую в обработке данных арифметического процессора, иллюстрируемого на фиг.3.
Фиг.5 - диаграмма, иллюстрирующая корреляцию между составляющими направления движения вперед вектора точки приложения силы реакции опоры и углом отклонения бедра в течение нормальной ходьбы.
Фиг.6 - диаграмма, иллюстрирующая корреляцию между составляющими вертикального направления вектора точки приложения силы реакции опоры и углом отклонения бедра в течение нормальной ходьбы.
Фиг.7 - диаграмма, иллюстрирующая корреляцию между составляющими направления движения вперед вектора точки приложения силы реакции опоры и углом сгибания коленного сустава при сидении на стуле.
Фиг.8 - диаграмма, иллюстрирующая корреляцию между составляющими направления движения вперед вектора точки приложения силы реакции опоры и углом сгибания коленного сустава при вставании со стула.
Фиг.9 - диаграмма, иллюстрирующая корреляцию между составляющими направления движения вперед вектора точки приложения силы реакции опоры и углом отклонения бедра при восхождении по лестнице.
Фиг.10 - диаграмма, иллюстрирующая корреляцию между составляющими направления движения вперед вектора точки приложения силы реакции опоры и углом отклонения бедра при спуске вниз по лестнице.
Фиг.11 - схема для объяснения обработки данных в средстве арифметического процессора, иллюстрируемого на фиг.3, предназначенном для оценки момента сустава.
Фиг.12 - график, иллюстрирующий состояния временных изменений расчетных значений сил реакции опоры в течение нормальной ходьбы, которые получены с помощью варианта осуществления настоящего изобретения.
Фиг.13 - график, иллюстрирующий состояния временных изменений расчетных значений сил реакции опоры при восхождении по лестнице, которые получены с помощью варианта осуществления настоящего изобретения.
Фиг.14 - график, иллюстрирующий состояния временных изменений расчетных значений сил реакции опоры при вставании со стула, которые получены с помощью варианта осуществления настоящего изобретения.
Фиг.15 - график, иллюстрирующий состояния временных изменений расчетных значений моментов, действующих на коленный сустав и тазобедренный сустав, которые получены с помощью варианта осуществления настоящего изобретения.
Подробное описание предпочтительного варианта осуществления настоящего изобретения
Один вариант осуществления будет описан со ссылкой на вышеупомянутые фиг.1 и фиг.2-10.
Настоящий вариант осуществления является вариантом осуществления, в котором способ оценки силы реакции опоры и способ оценки момента, соответствующие настоящему изобретению, применяют для человека, являющегося примером двуногого шагающего движущегося тела.
На фиг.2 в качестве примера приведена иллюстрация человека 1, на которой в соответствии с ориентировочной классификацией его строения человек имеет пару ног 2, 2 (левую и правую ногу), туловище 5, содержащее талию 3 и грудную клетку 4, голову 6 и пару рук 7, 7 (левую и правую руку). Талия 3 связана с соответствующими ногами 2, 2 через посредство пары тазобедренных суставов 8, 8 (левого и правого), так что туловище 5 поддерживается на обеих ногах 2, 2. Кроме того, грудная клетка 4 туловища 5 расположена на верхней стороне талии 3 так, чтобы свободно отклоняться к передней стороне человека 1 относительно талии 3. И, наконец, руки 7, 7 проходят из обеих левой и правой боковых частей верхней части грудной клетки 4, а голова 6 поддерживается на верхней концевой части грудной клетки 4.
Каждая из ног 2, 2 имеет бедро 9, проходящее от тазобедренного сустава 8, и голень 11, проходящую от кончика бедра 9 через посредство коленного сустава 10, а ступня 13 связана с концевой частью голени 11 через посредство лодыжки (голеностопного сустава) 12.
В настоящем варианте осуществления настоящего изобретения для оценки силы реакции опоры, действующей на каждую ногу 2 человека 1, имеющего вышеописанное строение, и для дополнительной оценки моментов, действующих на коленный сустав 10 и тазобедренный сустав 8, человек 1 оснащен следующими приборами.
В частности, на грудную клетку 4 туловища 5 смонтирован гиродатчик 14 (называемый далее гиродатчиком 14 грудной клетки), который генерирует выходные сигналы, соответствующие угловой скорости отклонения грудной клетки 4, измеритель 15 ускорения (называемый ниже измерителем 15 ускорения грудной клетки в направлении вперед-назад), который генерирует выходные сигналы, соответствующие ускорению грудной клетки 4 в направлении вперед-назад, арифметический процессор 16, содержащий центральный процессор, оперативное запоминающее устройство, постоянное запоминающее устройство и так далее, и батарею 17, служащую в качестве источника питания для арифметического процессора 16 и так далее. В таком случае эти приборы: гиродатчик 14 грудной клетки, измеритель 15 ускорения грудной клетки в направлении вперед-назад, арифметический процессор 16 и батарея 17 - размещены, например, в приемном элементе 18, выполненном в виде ранца, который закреплен на грудной клетке 4 при использовании ремня или аналогичного крепления (не показано), и унитарно прикреплены к грудной клетке 4 через посредство приемного элемента 18.
Ускорение, представляемое посредством выходных сигналов измерителя 15 ускорения грудной клетки, более определенно является ускорением в направлении вперед-назад в направлении горизонтальной секции грудной клетки 4 (в направлении, перпендикулярном центральной оси грудной клетки 4). В состоянии, в котором человек 1 прямо (вертикально) стоит на плоской площадке, оно является ускорением в горизонтальном направлении (в направлении оси Х абсолютной системы координат, как иллюстрируется на фиг.2) вперед-назад, тогда как в состоянии, в котором талия 3 или грудная клетка 4 отклоняется из вертикального направления (направления оси Z абсолютной системы координат, как иллюстрируется на фиг.2), оно является ускорением в направлении, отклоненном относительно горизонтального направления, на угол отклонения грудной клетки 4 относительно вертикального направления.
Кроме того, гиродатчик 19 (называемый ниже гиродатчиком 19 талии), предназначенный для генерирования выходных сигналов, соответствующих угловой скорости отклонения талии 3, измеритель 20 ускорения (называемый измерителем 20 ускорения талии в направлении вперед-назад), предназначенный для генерирования выходных сигналов, соответствующих ускорению талии 3 в направлении вперед-назад, и измеритель 21 ускорения (называемый ниже измерителем 21 ускорения талии в направлении вверх-вниз), предназначенный для генерирования выходных сигналов, соответствующих ускорению талии в направлении вверх-вниз, унитарно смонтированы/закреплены на талии 3 туловища 5 через посредство крепежного средства, например ремня (не показано).
В этом случае измеритель 20 ускорения талии в направлении вперед-назад, более конкретно, является датчиком, аналогичным измерителю 15 ускорения грудной клетки в направлении вперед-назад, предназначенному для детектирования ускорения в направлении вперед-назад в направлении горизонтальной секции талии 3 (в направлении перпендикулярном центральной оси талии 3). Кроме того, измеритель 21 ускорения талии в направлении вверх-вниз более конкретно является датчиком, предназначенным для детектирования ускорения в направлении вверх-вниз в направлении центральной оси талии 3 (то есть перпендикулярно ускорению, детектируемому посредством измерителя 20 ускорения талии в направлении вперед-назад). Между прочим, измеритель 20 ускорения талии в направлении вперед-назад и измеритель 21 ускорения талии в направлении вверх-вниз могут быть унитарно образованы как двухосный измеритель ускорения.
Кроме того, на тазобедренном суставе 8 и коленном суставе 10 каждой ноги 2 смонтированы датчик 22 углов тазобедренного сустава и датчик 23 углов коленного сустава, которые генерируют выходные сигналы, соответствующие относительным углам Δθс и Δθd сгибания. Что касается датчиков 22 углов тазобедренного сустава, то хотя на фиг.2 показан только датчик 22 углов тазобедренного сустава, относящийся к тазобедренному суставу 8 ноги 2 на этой стороне (правая сторона человека 1 обращена вперед), на тазобедренном суставе 8 ноги 2 на другой стороне (левая сторона человека 1 обращена назад) смонтирован датчик 22 углов тазобедренного сустава, сносно с датчиком 22 углов тазобедренного сустава на этой стороне.
Эти датчики 22 и 23 углов образованы, например, потенциометрами и прикреплены к каждой ноге 2 через посредство, например, ленточного элемента (не показано). В этом случае угол Δθс сгибания, детектируемый посредством каждого датчика 22 углов тазобедренного сустава, более конкретно является углом поворота бедра 9 ноги 2 вокруг тазобедренного сустава 8 (вокруг центральной оси тазобедренного сустава в направлении влево-вправо человека 1) относительно талии 3, при использовании в качестве критерия состояния, в котором задана постуральная зависимость между талией 3 и бедром ноги 2 (например, постуральная зависимость, в которой центральная ось талии 3 и центральная ось бедра 9 становятся по существу параллельными, когда человек 1 находится в вертикальном положении). Аналогичным образом, угол Δθd сгибания, детектируемый посредством каждого датчика 23 углов коленного сустава, является углом поворота голени 11 вокруг коленного сустава 10 (вокруг центральной оси коленного сустава 10 в направлении влево-вправо человека 1) относительно бедра 9, при использовании в качестве критерия состояния, в котором задана постуральная зависимость между бедром 9 и голенью 11 ноги 2 (например, постуральная зависимость, в которой центральная ось бедра 9 и центральная ось голени 11 становятся по существу параллельными друг другу).
Между прочим, вышеупомянутые соответствующие датчики 14, 15 и 19-23 соединены с арифметическим процессором 16 через посредство сигнальных линий (не показано) для ввода выходных сигналов (датчиков) в арифметический процессор 16.
Как иллюстрируется на фиг.3, вышеупомянутый арифметический процессор 16 предусмотрен с функциональными средствами. В частности, арифметический процессор 16 предусмотрен со средством 24 для оценки движения ноги, предназначенным для оценки того, является ли состояние движения ног 2, 2 человека состоянием одного положения (состояние, иллюстрируемое на фиг.1(а)) или состоянием двух положений (состояние, иллюстрируемое на фиг.1(b)), при использовании данных детектирования измерителя 21 ускорения талии в направлении вверх-вниз и данных расчетного значения силы реакции опоры каждой ноги 2, получаемых с помощью описываемого позднее средства 36 для оценки силы реакции опоры. Кроме того, арифметический процессор 16 предусмотрен со средством 25 для измерения углов отклонения грудной клетки, предназначенным для измерения угла θa отклонения грудной клетки 4 в абсолютной системе Cf координат (а конкретно, угла θа отклонения относительно, например, вертикального направления; смотри фиг.2), при использовании данных детектирования измерителя 15 ускорения грудной клетки в направлении вперед-назад и гиродатчика 14 грудной клетки, и со средством 26 для измерения углов отклонения талии, предназначенным для измерения угла θb отклонения талии 3 в абсолютной системе Cf координат (а конкретно, угла θb отклонения относительно, например, вертикального направления; смотри фиг.2), при использовании данных детектирования измерителя 20 ускорения талии в направлении вперед-назад и гиродатчика 19 талии.
Между прочим, арифметический процессор 16 предусмотрен со средством 27 для измерения опорного ускорения, предназначенного для получения ускорения (ускорения перемещения) а0=T(а0х, a0z), в абсолютной системе Cf координат, начала О координат системы Ср координат тела (координаты xz, как показано на фиг.2), которое устанавливают на талии 3 в качестве опорной точки человека 1 в настоящем варианте осуществления настоящего изобретения, как иллюстрируется на фиг.2, при использовании данных детектирования измерителя 20 ускорения талии в направлении вперед-назад и измерителя 21 ускорения талии в направлении вверх-вниз и данных угла θb отклонения талии 3, измеряемого с помощью средства 26 для измерения угла отклонения талии. В этом случае система Ср координат тела более конкретно является системой координат (системой координат, направления трех осей которой являются аналогичными, что и направления вышеупомянутой абсолютной системы Cf координат), в которой начало О координат устанавливают, например, в средней точке линии, соединяющей соответствующие центры левого и правого тазобедренных суставов 8, 8 человека 1, направление оси z устанавливают в вертикальном направлении, а направление оси х устанавливают в горизонтальном направлении движущегося вперед человека 1.
Кроме того, арифметический процессор 16 предусмотрен со средством 28 для вычисления положения ноги, предназначенным для получения углов θс и θd отклонения относительно бедра 9 и голени 11 каждой ноги 2 в абсолютной системе Cf координат (в частности, углов θс и θd отклонения относительно, например, вертикального направления; смотри фиг.2), при использовании данных детектирования датчика 22 углов тазобедренного сустава и датчика 23 углов коленного сустава ноги 2 и данных угла θb отклонения талии 3, полученных с помощью вышеупомянутого средства 26 для измерения углов отклонения талии.
Кроме того, арифметический процессор 16 предусмотрен со средством 29 для вычисления положения центра тяжести соответствующей части, предназначенным для определения положений центров тяжести соответствующих частей соответствующего жесткого тела (в частности, положений центров тяжести в вышеупомянутой системе Ср координат тела) человека 1, соответствующих позднее описываемой модели связи жестких тел, при использовании данных угла θа отклонения грудной клетки 4, угла θb отклонения талии 3, угла θс отклонения бедра 9 и угла θd отклонения голени 11 каждой ноги 2, полученных с помощью вышеупомянутого средства 25 для измерения угла отклонения грудной клетки, средства 26 для измерения угла отклонения талии и средства 28 для вычисления положения ноги: со средством 30 для вычисления положения центра тяжести тела, предназначенного для получения положения центра тяжести всего человека 1 в вышеупомянутой системе Ср координат тела, при использовании данных положений центров тяжести соответствующих частей соответствующего жесткого тела: со средством 31 для вычисления положения лодыжки, предназначенным для получения - при использовании данных положения центра G0 тяжести всего человека 1 (смотри фиг.1; называемого ниже центром G0 тяжести тела) и данных о соответствующих углах θс и θd отклонения бедра 9 и голени 11 каждой ноги 2 с помощью вышеупомянутого средства 28 для вычисления положения ноги - положения лодыжки 12 каждой ноги 2 как конкретной части каждой ноги 2 в настоящем варианте осуществления относительно центра G0 тяжести тела (в частности, ΔX, ΔZ, ΔXr и ΔZr в вышеупомянутых уравнениях (5)); и со средством 32 для вычисления ускорения центра тяжести тела, предназначенным для определения ускорения а=T(ах, az) (смотри фиг.1) центра G0 тяжести в абсолютной системе Cf координат при использовании данных положения центра тяжести тела, полученных с помощью вышеупомянутого средства 30 для вычисления положения центра тяжести тела, и данных ускорения а0 начала О координат системы Ср координат тела, полученных с помощью средства 27 для измерения опорного ускорения.
Кроме того, арифметический процессор 16 предусмотрен со средством 33 для вычисления ускорения соответствующей части ноги, предназначенным для определения ускорений (ускорений перемещения) центров тяжести бедра 9 и голени 11 каждой ноги 2 в абсолютной системе Cf координат, при использовании данных положений центров тяжести соответствующих частей соответствующего жесткого тела человека 1 (в частности, положений центров тяжести соответствующих частей жесткого тела, относящихся к каждой ноге 2), полученных с помощью вышеупомянутого средства 29 для вычисления положения центра тяжести соответствующей части, и данных ускорения а0 начала О координат системы Ср координат тела, полученных с помощью вышеупомянутого средства 27 для измерения опорного ускорения: со средством 34 для вычисления угловой скорости соответствующей части ноги, предназначенным для определения угловых скоростей бедра 9 и голени 11 каждой ноги 2 в абсолютной системе Cf координат, при использовании данных об соответствующих углах θс и θd отклонения бедра 9 и голени 11 ноги 2, полученных с помощью вышеупомянутого средства 28 для вычисления положения ноги; и со средством 35 для оценки точки приложения силы реакции, предназначенным для оценки положения точки приложения силы реакции опоры каждой ноги 2, касающейся грунта, при использовании данных угла θс отклонения бедра 9, полученного с помощью вышеупомянутого средства 28 для вычисления положения ноги, и угла θd сгибания коленного сустава 10, измеряемого с помощью вышеупомянутого датчика 23 углов коленного сустава.
Кроме того, арифметический процессор 16 предусмотрен со средством 36 для оценки силы реакции опоры, предназначенным для оценки значения силы реакции опоры, действующей на каждую ногу 2, при использовании данных ускорения а центра тяжести тела, полученных с помощью вышеупомянутого средства 32 для вычисления ускорения центра тяжести тела, данных положения лодыжки 12 каждой ноги 2 относительно центра тяжести тела, полученных с помощью вышеупомянутого средства 31 для вычисления положения лодыжки, и данных о результате суждения о состоянии движения ног 2, 2, полученных с помощью вышеупомянутого средства 24 для оценки движения ноги; и со средством 37 для оценки момента сустава, предназначенным для оценки моментов, действующих на коленный сустав 10 и тазобедренный сустав 8, соответственно, каждой ноги 2, при использовании данных об этих расчетных значениях силы реакции опоры, данных ускорений центров тяжести бедра 9 и голени 11 каждой ноги 2, полученных с помощью вышеупомянутого средства 33 для вычисления ускорения соответствующей части ноги, данных угловых скоростей бедра 9 и голени 11 каждой ноги 2, полученных с помощью вышеуказанного средства 34 для вычисления угловой скорости соответствующей части ноги, данных расчетного положения точки приложения силы реакции опоры, полученных с помощью вышеупомянутого средства 35 для оценки точки приложения силы реакции опоры, и данных об углах θс и θd отклонения бедра 9 и голени 11, соответственно, каждой ноги 2, полученных с помощью вышеупомянутого средства 28 для вычисления положения ног.
Теперь, работа этого варианта осуществления будет описана вместе с более подробным содержимым обработки данных соответствующих средств вышеупомянутого арифметического процессора 16.
В настоящем варианте осуществления настоящего изобретения, если человек 1 включает переключатель источника питания (не показано) арифметического процессора 16 в состоянии, в котором обе ноги 2, 2 касаются опоры (пола), например, при движении ног 2, 2, например, при ходьбе, то обработка данных посредством арифметического процессора 16 выполняется в последовательности на заданное время цикла, как будет описано ниже, чтобы в соответствии с этим последовательно получать расчетные значения сил реакции опоры и так далее, действующих на каждую ногу 2.
В частности, арифметический процессор 16 сначала выполняет обработку данных вышеупомянутого средства 24 для оценки движения ноги. При обработке данных средства 24 для оценки движения ноги данные детектирования ускорения талии 3 в направлении вверх, получаемые с помощью вышеупомянутого измерителя 21 ускорения талии в направлении вверх-вниз, сравнивают с заданным пороговым значением, определенным заранее на вышеупомянутое время цикла. В таком случае, если детектируемое значение ускорения превышает пороговое значение, то считают, что начинается состояние двух положений, как иллюстрируется на вышеупомянутом чертеже фиг.1(b), тогда как состояние одного положения, как показано на фиг.1(а), заканчивается. В частности, при переходе из состояния одного положения в состояние двух положений в течение ходьбы человека 1, касание ноги 2 стороны свободной ноги пола (опоры) побуждает талию 3 вблизи тазобедренных суставов 8 генерировать по существу вверх относительно большое ускорение (ускорение, которое не может генерироваться в нормальном состоянии одного положения). Таким образом, путем сравнения данных детектирования ускорения талии 3 в направлении вверх, получаемых с помощью измерителя 21 ускорения талии в направлении вверх-вниз, с заданным пороговым значением, как описано выше, вышеупомянутое средство 24 для оценки движения ноги определяет начало состояния двух положений и конец состояния одного положения.
Кроме того, при обработке средства 24 для оценки движения ноги расчетных значений сил Ft и Fr реакции опоры (смотри фиг.1(b)), действующих на обе ноги 2, 2, соответственно, которые получают в состоянии двух положений с помощью средства 35 для оценки точки приложения силы реакции опоры, как будет описано позднее, расчетное значение силы Fr=T(Frx, Frz) реакции опоры (в частности, абсолютное значение =√(Frx2+Frz2) силы Fr реакции опоры, полученной во время предшествующего цикла арифметического процессора 16), действующей на ногу 2 на задней стороне относительно направления движения вперед человека, сравнивают с заданным пороговым значением (положительное значение приблизительно "0"), определенным заранее. В таком случае, если абсолютная величина расчетного значения силы Fr реакции опоры опускается до порогового значения или ниже, то полагают, что состояние двух положений заканчивается, и начинается состояние одного положения. В настоящем варианте осуществления исходное состояние состояния движения ног 2, 2 является состоянием двух положений, и средство 24 для оценки движения ноги считает, что состояние движения ног 2, 2 является состоянием двух положений до тех пор, пока расчетное значение силы реакции опоры, действующей на каждую из ног 2, 2, не понизится до вышеупомянутого порогового значения или менее.
Параллельно с обработкой данных средства 24 для оценки движения ноги, как описано выше, арифметический процессор 16 выполняет обработку данных с помощью вышеупомянутых средства 25 для измерения углов отклонения грудной клетки и средства 26 для измерения углов отклонения талии. В этом случае при обработке данных средства 25 для измерения углов отклонения грудной клетки угол θа отклонения грудной клетки 4 в абсолютной системе Cf координат получают последовательно на время предшествующего цикла в соответствии с известной методикой при использовании обработки данных так называемого фильтра Кальмана на основе данных детектирования ускорения грудной клетки 4 в направлении вперед-назад и угловой скорости грудной клетки 4, которые вводят из измерителя 15 ускорения грудной клетки вперед-назад и гиродатчика 14 грудной клетки, соответственно. Аналогичным образом, при обработке данных средства 25 для измерения угла отклонения талии, угол θb отклонения талии 3 в абсолютной системе Cf координат получают последовательно при использовании обработки данных фильтра Кальмана на основе данных детектирования ускорения талии 3 в направлении вперед-назад и угловой скорости талии 3, которые вводят из измерителя 20 ускорения талии в направлении вперед-назад и гиродатчика 19 талии, соответственно. В этом случае, в настоящем варианте осуществления настоящего изобретения углы θа и θb отклонения грудной клетки 4 и талии 3, соответственно, в абсолютной системе Cf координат являются углами отклонения относительно, например, вертикального направления (направления силы тяжести).
Также представляется возможным получать углы отклонения грудной клетки 4 и талии 3, например, путем интегрирования данных детектирования угловых скоростей посредством гиродатчиков 14 и 19. Однако так же, как в настоящем варианте осуществления, углы θa и θb отклонения грудной клетки 4 и талии 3 могут быть точно измерены при использовании обработки данных фильтра Кальмана.
В таком случае арифметический процессор 16 выполняет обработку данных вышеупомянутого средства 28 для вычисления положения ноги и обработку данных вышеупомянутого средства 27 для измерения опорного ускорения.
При обработке данных с помощью вышеупомянутого средства 28 для вычисления положения ноги углы θс и θd отклонения (углы отклонения относительно вертикального направления; смотри фиг.2) бедра 9 и голени 11 каждой ноги 2 в абсолютной системе Cf координат получают на вышеупомянутое время цикла следующим образом. В частности, угол θс отклонения бедра 9 каждой ноги 2 вычисляют из значения текущего времени данных детектирования угла Δθc сгибания тазобедренного сустава 8 посредством вышеупомянутого датчика 22 углов тазобедренного сустава, прикрепленного к ноге 2, и значения текущего времени угла θb отклонения талии 3, полученного с помощью вышеупомянутого средства 25 для измерения углов отклонения талии, при использовании следующего уравнения (6).

В этом случае угол θb отклонения талии 3 принимает отрицательное значение, если талия 3 отклонена относительно вертикального направления так, что верхняя концевая часть талии 3 выступает перед человеком 1 по сравнению с ее нижней концевой частью, а угол Δθс сгибания тазобедренного сустава 8 принимает положительное значение, если бедро 9 отклонено относительно центральной оси талии 3 так, что нижняя концевая часть бедра 9 выступает вперед человека 1.
Кроме того, угол θd отклонения голени 11 каждой ноги 2 вычисляют из значения текущего времени угла θс отклонения бедра, полученного вышеописанным образом, и значения текущего времени данных детектирования угла Δθd сгибания коленного сустава 10, полученного посредством вышеупомянутого датчика 23 углов коленного сустава, прикрепленного к ноге 2, при использовании следующего уравнения(7).

В этом случае угол сгибания коленного сустава 10 принимает положительное значение, если голень 11 отклоняется относительно центральной оси бедра 9 к задней стороне бедра 9.
Кроме того, при обработке данных вышеупомянутого средства 27 для измерения опорного ускорения ускорение а0=T(а0х, a0z) начала О координат вышеупомянутой системы Ср координат тела в абсолютной системе Cf координат получают следующим образом. В частности, если дано, что значение текущего времени данных детектирования ускорения талии 3 в направлении вперед-назад посредством вышеупомянутого измерителя 20 ускорения талии в направлении вперед-назад равно ар, а значение текущего времени данных детектирования ускорения талии 3 в направлении вверх-вниз посредством вышеупомянутого измерителя 21 ускорения талии в направлении вверх-вниз равно aq, то ускорение а0=T(а0х, a0z) в абсолютной системе Cf координат получают из тех данных детектирования ар и aq и значения текущего времени угла θb отклонения талии 3, полученного с помощью вышеупомянутого средства 25 для измерения угла отклонения талии, при использовании следующего уравнения (8).

В таком случае арифметический процессор 16 выполняет обработку данных вышеупомянутого средства 29 для вычисления положения центра тяжести соответствующей части и определяет положения (положения относительно начала координат системы Ср координат тела) центров тяжести соответствующих частей соответствующих жестких тел человека 1 в вышеупомянутой системе Ср координат тела при использовании модели связи жестких тел, описываемой ниже.
Как показано на фиг.4, модель R связи жестких тел, используемая в настоящем варианте осуществления настоящего изобретения, является моделью, которая выражает (представляет) человека 1 посредством связывания вместе жестких тел R1, R1, соответствующих бедрам 9 соответствующих обеих ног, жестких тел R2, R2, соответствующих голеням 11, 11, жесткого тела R3, соответствующего талии 3, и жесткого тела R4, соответствующей части 38 (называемой ниже верхней частью 38 тела) в комбинации вышеупомянутых грудной клетки 4, тел 7, 7 рук и головы 6. В этом случае часть взаимосвязи между каждым жестким телом R1 и жестким телом R3 и часть взаимосвязи между жестким телом R1 и жестким телом R2 соответствуют тазобедренному суставу 8 и коленному суставу 10, соответственно. Кроме того, часть взаимосвязи между жестким телом R3 и жестким телом R4 является частью 39 центра шарнира качания для грудной клетки 4 относительно талии 3.
В настоящем варианте осуществления положения центров G1, G2, G3 и G4 тяжести соответствующих жестких тел (бедра 9 и голени 11 каждой ноги 2, талии 3 и верхней части 38 тела) человека 1, соответствующие жестким телам R1-R4 такой модели R связи жестких тел в соответствующих частях соответствующих жестких тел, записывают заранее и хранят в памяти (не показано) арифметического процессора 16.
В этом случае положения центров G1, G2, G3 и G4 тяжести соответствующих частей соответствующих жестких тел, записываемые/хранимые в арифметическом процессоре 16, являются положениями в системе координат, которая зафиксирована относительно соответствующей части каждого жесткого тела. В этом случае в качестве данных, представляющих каждое из положений центров G1, G2, G3 и G4 тяжести соответствующих частей соответствующих жестких тел, используют, например, расстояние в направлении центральной оси соответствующей части жесткого тела от центральной точки сустава на одной концевой части такой соответствующей части жесткого тела. В частности, например, как показано на фиг.4, положение центра G1 тяжести каждого бедра 9 дается как положение с расстоянием t1 в направлении центральной оси бедра 9 от центра тазобедренного сустава 8 бедра 9, положение центра G2 тяжести каждой голени 11 дается как положение с расстоянием t2 в направлении центральной оси голени 11 от центра коленного сустава 10 голени 11, а значения этих расстояний t1 и t2 получают заранее и записывают/хранят в арифметическом процессоре 16. Это также относится к положениям центров G3, G4 тяжести других соответствующих частей жестких тел.
Строго говоря, на положение центра G4 тяжести верхней части 38 тела оказывает влияние движения рук 7, 7, входящих в состав верхней части 38 тела. Однако ввиду того, что руки 7, 7 в процессе ходьбы, в общем, занимают симметричное взаимное расположение относительно центральной оси грудной клетки 4, положение центра G4 тяжести верхней части 38 тела сильно не изменяется и по существу соответствует, например, положению центра G4 тяжести верхней части 38 тела в состоянии прямого (вертикального) положения.
Кроме того, в настоящем варианте осуществления помимо данных, представляющих положения центров G1, G2, G3 и G4 тяжести соответствующих частей жестких тел (бедро 9 и голень 11 каждой ноги 2, талия 3 и верхняя часть 38 тела), в арифметическом процессоре 16 заранее определяются и записываются/хранятся данные масс соответствующих частей соответствующих жестких тел и данные о размерах соответствующих частей соответствующих жестких тел (например, данные о длинах соответствующих частей соответствующих жестких тел).
Масса голени 11 является массой, включающей в себя стопу 13 ((прим. пер.) массу стопы). Кроме того, данные, ранее записанные/хранимые в арифметическом процессоре 16, как описано выше, могут быть получены посредством фактического измерения или аналогичным образом или могут быть получены расчетным путем из высоты и массы человека 1 на основе статистических данных нормального человека. В общем, положения центров G1, G2, G3 и G4 тяжести, массы и размеры вышеупомянутых соответствующих частей соответствующих жестких тел имеют корреляцию с высотой или массой человека, и на основе этой корреляции можно относительно точно оценить положения центров G1, G2, G3 и G4 тяжести, массы и размеры вышеупомянутых соответствующих частей соответствующих жестких тел из данных о высоте и массе человека.
Вышеуказанное средство 29 для вычисления положения центра тяжести соответствующей части определяет положения центров G1, G2, G3 и G4 тяжести соответствующих частей соответствующих жестких тел в системе Ср координат тела (координаты x, z на фиг.4), имеющей начало О координат, зафиксированное на талии 3, из ранее записанных/хранимых в арифметическом процессоре 16, как описано выше, значений текущего времени угла θа отклонения грудной клетки 4 (= углу отклонения верхней части 38 тела) и угла θb отклонения талии 3, полученных с помощью вышеупомянутого средства 25 для измерения угла отклонения грудной клетки и средства 26 для измерения угла отклонения талии, соответственно, и значений текущего времени углов θс и θd отклонения бедра 9 и голени 11, соответственно, каждой ноги 2, полученных с помощью вышеупомянутого средства 28 для вычисления положения ноги.
В этом случае, поскольку углы θa-θd отклонения соответствующих частей соответствующих жестких тел (бедра 9 и голени 11 каждой ноги 2, талии 3 и верхней части 38 тела) получают так, как это описано выше, то положения и позы соответствующих частей соответствующих жестких тел в системе Ср координат тела могут быть определены из данных углов θа-θd отклонения и данных о размерах соответствующих частей соответствующих жестких тел. Таким образом, определяют положения центров G1, G2, G3 и G4 соответствующих частей соответствующих жестких тел в системе Ср координат тела.
В частности, например, со ссылкой на фиг.4, относительно ноги 2, расположенной на левой стороне фиг.4, поскольку угол отклонения бедра 9 в системе Ср координат тела (угол отклонения относительно направления оси z) равен θс (в этом случае θс<0, как показано на фиг.4), то координаты положения центра G1 тяжести бедра 9 с системе Ср координат тела становятся (t1·sinθc, -t1·cosθc). С другой стороны, поскольку угол отклонения голени 11 в системе Ср координат тела равен θd (θd<0, как показано на фиг.4) и дано, что длина бедра 9 равна Lc, то координаты положения центра G2 тяжести голени 11 в системе Ср координат тела становятся (Lc·sinθc+t2·sinθd, -Lc·cosθc-t2·cosθd). Центры тяжести бедра 9 и голени 11 другой ноги 2, талии 3 и верхней части 38 тела могут быть определены так же, как это описано выше.
После определения положений центров G1, G2, G3 и G4 тяжести соответствующих частей соответствующих жестких тел в системе Ср координат тела с помощью средства 29 для вычисления положения центра тяжести соответствующей части, как описано выше, арифметический процессор 16 выполняет обработку данных вышеупомянутого средства 30 для вычисления положения центра тяжести тела и определяет положение (Xg, zg) центра G0 тяжести тела человека в системе Ср координат тела при использовании данных положений центров G1, G2, G3 и G4 тяжести соответствующих частей соответствующих тел и данных масс соответствующих частей соответствующих жестких тел.
В этом случае дано, что положение центра G3 тяжести талии 3 в системе Ср координат тела и ее масса составляют (х3, z3) и m3, соответственно, положение центра G4 тяжести верхней части 38 тела в системе Ср координат тела и ее масса составляют (х4, z4) и m4, соответственно, положение центра G1 тяжести бедра 9 ноги 2 на левой стороне человека 1, обращенной вперед, в системе Ср координат тела и его масса составляют (х1L, z1L) и m1L, соответственно, положение центра G2 тяжести голени 11 той же ноги в системе Ср координат тела и ее масса составляют (x2L, z2L) и m2L, соответственно, положение центра G1 тяжести бедра 9 ноги 2 на правой стороне в системе Ср координат тела и его масса составляют (x1R, z1R) и m1R, соответственно, положение центра G2 тяжести голени 11 той же ноги в системе Ср координат тела и ее масса составляют (x2R, z2R) и m2R, соответственно, а масса человека 1 равна M (= m1L+m2L+m1R+m2R+m3+m4), причем положение (Xg, zg) центра G0 тяжести человека в системе Ср координат тела определяют с помощью следующих уравнений (9).

После выполнения обработки данных средства 30 для вычисления положения центра тяжести тела, как описано выше, арифметический процессор 16 дополнительно выполняет обработку данных вышеупомянутого средства 32 вычисления ускорения центра тяжести тела и обработку данных вышеупомянутого средства 31 для вычисления положения лодыжки.
В этом случае, при обработке данных средства 32 для вычисления ускорения центра тяжести тела, вначале при использовании данных временного ряда положений (Xg, zg) центра G0 тяжести тела в системе Ср координат тела, полученных с помощью средства 30 для вычисления положения центра тяжести тела на время предшествующего цикла, определяют дифференцированное значение второго порядка положения (Xg, zg) центра G0 тяжести тела в системе Ср координат тела, то есть ускорение T(d2xg/dt2, d2zg/dt2) центра G0 тяжести тела относительно начала О координат системы Ср координат тела. В таком случае, посредством определения векторной суммы ускорения T(d2xg/dt2, d2zg/dt2) и ускорения а0=T(а0х, a0z), определенного с помощью вышеупомянутого средства 27 для измерения опорного ускорения, начала О координат системы Ср координат тела в абсолютной системе Cf координат определяют ускорение а=T(ах, az) центра G0 тяжести тела в абсолютной системе Cf координат.
Кроме того, при обработке данных вышеупомянутого средства 31 для вычисления положения лодыжки, в начале из значений текущего времени данных углов θс и θd отклонения бедра 9 и голени 11, соответственно, каждой ноги 2, полученных с помощью вышеупомянутого средства 28 для вычислении положения ноги, значений текущего времени данных угла θb отклонения талии, полученных с помощью вышеупомянутого средства 26 для измерения угла отклонения талии, и данных о размерах (длинах) бедра 9 и лодыжки 11, определяют положение лодыжки 12 каждой ноги 2 в вышеупомянутой системе Ср координат тела путем обработки данных, подобной обработке данных вышеупомянутого средства 29 для вычисления положения центра тяжести соответствующей части. В частности, со ссылкой на фиг.4 относительно ноги 2, расположенной на левой стороне фиг.4, дано, что длина голени 11 (длина от центра коленного сустава 10 до лодыжки 12) составляет Ld, координатами (х12, z12) положения лодыжки 12 в системе Ср координат тела становятся (Lc·sinθc+Ld·sinθd, -Lc·cosθc-Ld·cosθd) (где θс<0 и θd<0), как показано на фиг.4. Это также применимо к другой ноге 2.
В таком случае значения текущего времени данных положения (х12, z12) лодыжки 12 в системе Ср координат тела и положении (Xg, zg) центра G0 тяжести в системе Ср координат тела, полученных с помощью вышеупомянутого средства 30 для вычисления положения центра тяжести тела, определяют радиус-вектор T(x12-xg, z12-zg) лодыжки 12 каждой ноги 2 относительно центра G0 тяжести тела, то есть ΔXf, ΔZf, ΔXr и ΔZr в вышеупомянутых уравнениях (5).
В таком случае арифметический процессор 16 выполняет обработку данных вышеупомянутого средства 36 для оценки силы реакции опоры следующим образом. В частности, в этой обработке данных, если состояние движения ног 2, 2, определенное с помощью вышеупомянутого средства 24 для оценки движения ноги, во время текущего цикла является состоянием одного положения, то получают расчетное значение силы F=T(Fx, Fz) реакции опоры, действующей на ногу 2, касающуюся грунта, из значений массы M и ускорения g силы тяжести человека 1 (они хранятся в арифметическом процессоре 16) и значения текущего времени ускорения а=T(ах, az) центра G0 тяжести тела в абсолютной системе Cf координат, полученного с помощью вышеупомянутого средства 32 для вычисления ускорения центра тяжести тела, при использовании вышеупомянутого уравнения (2). В этом случае сила реакции опоры, действующая на ногу 2, не касающуюся грунта (свободную ногу 2), составляет T(0, 0).
С другой стороны, если состояние движения ног 2, 2, определенное с помощью вышеупомянутого средства 24 для оценки движения ноги, во время текущего цикла является состоянием двух положений, то получают расчетные значения сил Ff=T(Ffx, Ffz) и Ff=T(Frx, Frz), соответственно, реакции опоры, действующих на ноги 2, из значений массы M и ускорения g силы тяжести человека 1, значения текущего времени ускорения а=T(ах, az) центра G0 тяжести тела в абсолютной системе Cf координат, полученного с помощью вышеупомянутого средства 32 для вычисления ускорения центра тяжести тела, и данных значений текущего времени положения лодыжки 12 каждой ноги 2 относительно центра G0 тяжести тела (значений текущего времени данных о ΔXf, ΔZf, ΔXr и ΔZr в вышеупомянутых уравнениях (5)), полученных с помощью вышеупомянутого средства 31 для вычисления положения лодыжки, при использовании вышеупомянутого уравнения (5).
С другой стороны, параллельно обработке данных средства 30 для вычисления положения центра тяжести тела, средства 32 для вычисления ускорения центра тяжести тела, средства 31 для вычисления положения лодыжки и средства 36 для оценки силы реакции опоры, как описано выше, арифметический процессор 16 выполняет обработку данных вышеупомянутых средства 33 для вычисления ускорения соответствующей части ноги, средства 34 для вычисления угловой скорости соответствующей части ноги и средства 35 для оценки точки приложения силы реакции опоры.
В этом случае, при обработке данных вышеупомянутого средства 33 для вычисления ускорения соответствующей части ноги, в начале аналогично тому, как в вышеупомянутом средстве 32 для вычисления ускорения центра тяжести тела, использующем данные временного ряда положений центров G1 и G2 тяжести бедра 9 и голени 11, соответственно, являющихся соответствующими частями каждой ноги 2 в системе Ср координат тела, которые получают с помощью вышеупомянутого средства 29 для вычисления положения центра тяжести соответствующей части на время предшествующего цикла, получают дифференцированные значения второго порядка положений центров G1 и G2 тяжести бедра 9 и голени 11, соответственно, в системе Ср координат тела, то есть ускорения (ускорения относительно начала О координат системы Ср координат тела) соответствующих центров G1 и G2 тяжести бедра 9 и голени 11 в системе Ср координат тела. В таком случае, благодаря получению векторной суммы этих соответствующих ускорений и ускорения а0=T(а0х, a0z) талии 3 в абсолютной системе Cf координат с помощью вышеупомянутого средства 27 для измерения опорного ускорения, определяют ускорения (более конкретно, координатные составляющие ускорений в абсолютной системе Cf координат) бедра 9 и голени 11, соответственно, в абсолютной системе Cf координат.
Кроме того, при обработке данных вышеупомянутого средства 34 для вычисления угловой скорости соответствующей части ноги, использующего данные временного ряда углов θс и θd отклонения бедра 9 и голени 11, соответственно, каждой ноги 2, получаемые с помощью вышеупомянутого средства 28 для вычисления положения ноги на время предшествующего цикла, получают дифференцированные значения второго порядка углов θс и θd отклонения бедра 9 и голени 11, соответственно, то есть угловых скоростей бедра 9 и голени 11, соответственно.
Кроме того, при обработке данных средства 35 для оценки точки приложения силы реакции опоры по отношению к ноге 2, касающейся грунта, определяют вектор (радиус-вектор точки приложения силы реакции опоры относительно лодыжки 12; называемый ниже вектором точки приложения силы реакции опоры) от лодыжки 12 ноги 2 к точке приложения силы реакции опоры ступни 13 ноги 2 (точка, в которой считают сконцентрированной общую силу реакции опоры, действующую на касающуюся грунта часть ступни 13), получают как данные, представляющие положение точки приложения силы реакции опоры, например, из значения текущего времени угла θс отклонения бедра, полученного с помощью вышеупомянутого средства 28 для вычисления положения ноги, на основе заданной корреляции, как показано на фиг.5 и фиг.6.
В частности, в соответствии со знаниями авторов этой заявки, угол θс отклонения бедра 9 или угла Δθd сгибания коленного сустава 10 ноги 2, касающейся грунта, имеет относительно большую корреляцию с точкой приложения силы реакции опоры. Вышеупомянутый вектор точки приложения силы реакции опоры, в частности, составляющие вектора точки приложения силы реакции опоры в направлении движения вперед (направление оси X) человека 1, и составляющие вектора точки приложения силы реакции опоры в вертикальном направлении (вектор оси Z), соответственно, изменяются в зависимости, например, от угла θс отклонения бедра 9, как показано на фиг.5 и фиг.6. В этом случае отрицательный угол θс отклонения бедра 9 является углом, если бедро 9 отклонено относительно центральной оси талии 3 так, что нога 2 проходит к тыльной стороне человека 1 (например, нога 2 на правой стороне человека 1, обращенного вперед на фиг.2), тогда как положительный угол θс является углом, если бедро 9 отклонено относительно центральной оси талии 3 так, что нога 2 находится на передней стороне человека 1 (например, нога 2 на левой стороне человека 1, обращенного вперед на фиг.2).
Таким образом, в настоящем варианте осуществления приближенные выражения, использующие угол θс отклонения бедра 9 в качестве параметра, который представляет корреляции, иллюстрируемые на фиг.5 и фиг.6, получают и заранее записывают и хранят в арифметическом процессоре 16. В таком случае, при обработке данных вышеупомянутого средства 35 для оценки точки приложения силы реакции опоры, значение текущего времени угла θс отклонения бедра, полученное с помощью вышеупомянутого средства 28 для вычисления положения ноги, подставляют в вышеупомянутые приближенные выражения, чтобы в соответствии с этим получить вышеупомянутый вектор точки приложения силы реакции опоры (в частности, составляющие вектора точки приложения силы реакции опоры в направлении оси Х и в направлении оси Z).
В этом случае в корреляциях, иллюстрируемых на фиг.5 и фиг.6, в котором угол θс отклонения бедра имеет минимальное значение, даже при одинаковом угле θс отклонения бедра, значение вектора точки приложения силы реакции опоры отличается между стадией уменьшения угла θс отклонения и стадией его увеличения. Таким образом, в настоящем варианте осуществления при получении вышеупомянутого приближенного выражения переход вышеупомянутой корреляции от приземления пятки ступни 13 на пол (на опору) для съема кончиков пальцев ноги с опоры классифицируется в первой фазе (фаза а1 на фиг.5; фаза b1 на фиг.6), в которой угол θс отклонения бедра 9 является положительным, второй фазе (фаза а2 на фиг.5; фаза b2 на фиг.6), в которой угол θс отклонения бедра 9 является отрицательным, и скорость изменения угла θс отклонения, то есть угловая скорость отклонения бедра 9, является отрицательной, и в третьей фазе (фаза а3 на фиг.5; фаза b3 на фиг.6), в которой угол θс отклонения бедра является отрицательным, а угловая скорость отклонения бедра 9 является положительной, и эти фазы аппроксимируются аналогичной функцией или другими функциями относительно составляющих направления оси Х и составляющих направления оси Z вектора точки приложения силы реакции опоры, соответственно. Приближенное выражение фазы в комбинации первой и второй фаз а1 и а2 в корреляции фиг.5, если дано, что составляющие направления оси Х вектора точки приложения силы реакции опоры являются рх, выражаются, например, полиномиальной функцией шестого порядка в виде
px=x1·θc6+x2·θc5+x3·θc4+x4·θc3+x5·θc2+x6·θc+x7
(где x1-x7 являются постоянными величинами).
Кроме того, приближенное выражение третьей фазы а3 в корреляции фиг.5 выражается, например, полиномиальной функцией четвертого порядка в виде
px=x8·θc4+x9·θc3+x10·θc2+x11·θc+x12
(где x8-x12 являются постоянными величинами).
Кроме того, приближенное выражение фазы в комбинации первой и второй фаз b1 и b2 в корреляции фиг.6, если дано, что составляющие направления оси Z вектора точки приложения силы реакции опоры являются pz, выражаются, например, полиномиальной функцией шестого порядка в виде
pz=z1·θc6+z2·θc5+z3·θc4+z4·θc3+z5·θc2+z6·θc+z7
(где z1-z7 являются постоянными величинами).
Кроме того, приближенное выражение третьей фазы b3 в корреляции фиг.6 выражается, например, полиномиальной функцией третьего порядка в виде
pz=z8·θc3+z9·θc2+z10·θc+z11 (где z8-z11 являются постоянными величинами).
В таком случае при определении вектора точки приложения силы реакции опоры определяют, является ли угол θс отклонения бедра 9 положительным или отрицательным, и дополнительно определяют, является ли угловая скорость отклонения бедра, вычисленная посредством дифференцирования первого порядка данных временного ряда углов θс отклонения бедра 9, положительной или отрицательной. Кроме того, из определенного положительного или отрицательного угла θс и определенной положительной или отрицательной угловой скорости отклонения определяют, которая из фаз проявляется в настоящее время, и путем подставления значения текущего времени угла θс отклонения бедра 9 в приближенное выражение оцениваемой фазы вычисляют вектор точки приложения силы реакции опоры. В соответствии с этим могут быть дискриминационно вычислены величина вектора точки приложения силы реакции опоры на стадии уменьшения угла θс отклонения бедра 9 и величина вектора точки приложения силы реакции опоры на стадии его увеличения.
В настоящем варианте осуществления корреляцию между углом θс отклонения бедра 9 ноги и вектором точки приложения силы реакции опоры аппроксимируют посредством полиномов, чтобы в соответствии с этим получить вектор точки приложения силы реакции опоры. Однако также представляется возможным записывать/хранить корреляции, иллюстрируемые на фиг.5 и фиг.6, в виде таблицы данных, и при использовании таблицы данных получать вектор точки приложения силы реакции опоры из угла θс отклонения бедра 9.
Кроме того, положение точки приложения силы реакции опоры имеет также корреляцию с углом сгибания коленного сустава 10 ноги 2, касающейся грунта. Таким образом, положение точки приложения силы реакции опоры может быть определено из угла Δθd сгибания коленного сустава 10, измеряемого посредством датчика 23 углов коленного сустава, вместо угла θс отклонения бедра 9. В альтернативном варианте осуществления, используя как угол θс отклонения бедра 9, так и угол Δθd сгибания коленного сустава 10, может быть оценено положение точки приложения силы реакции опоры с помощью карты или аналогичным образом.
Кроме того, если человек 1 сидит на стуле или встает со стула из сидячего положения, то корреляция, иллюстрируемая на фиг.7 (при сидении на стуле) или на фиг.8 (при вставании со стула), устанавливается между положением точки приложения силы реакции опоры и углом Δθd сгибания коленного сустава 10, а при восхождении или спуске по лестнице, фиг.9 (при восхождении по лестнице) или фиг.10 (при опускании по лестнице), устанавливается корреляция между положением точки приложения силы реакции опоры и углом θс отклонения бедра 9. Таким образом, при сидении на стуле или вставании со стула может быть оценено положение точки приложения силы реакции опоры из угла Δθd сгибания коленного сустава 10 на основе корреляции, иллюстрируемой на фиг.7 или фиг.8, тогда как при восхождении по лестнице или опускании по лестнице положение точки приложения силы реакции опоры может быть оценено из угла θс отклонения бедра 9 на основе корреляции, иллюстрируемой на фиг.9 или фиг.10.
В таком случае, после оценки положения точки приложения силы реакции, как описано выше, арифметический процессор 16 выполняет обработку данных вышеупомянутого средства 37 для оценки момента сустава и получает моменты, действующие на коленный сустав 10 и тазобедренный сустав 8 каждой ноги 2. Эту обработку данных осуществляют на основе так называемой модели обратной динамики при использовании значений текущего времени данных, соответственно полученных с помощью вышеупомянутых средства 36 для оценки силы реакции опоры, средства 33 для вычисления ускорения соответствующей части, средства 34 для вычисления угловой скорости соответствующей части ноги, средства 35 для оценки точки приложения силы реакции опоры и средства 28 для вычисления положения ноги. Эта модель обратной динамики использует уравнение движения для движения переноса каждой соответствующей части жесткого тела человека 1 и уравнение движения для движения его поворота для того, чтобы получить моменты, действующие на суставы надлежащим образом от сустава ближе к точке приложения силы реакции опоры. В настоящем варианте осуществления моменты, действующие на коленный сустав 10 и тазобедренный сустав 8 каждой ноги 2, получают надлежащим образом.
Более конкретно, как следует из фиг.11, в начале, что касается голени 11 каждой ноги 2, то сила (сила реакции сустава), действующая на лодыжку 12 на кончике голени 11, сила (сила реакции сустава), действующая на часть коленного сустава 10 голени 11, и ускорение переноса центра G2 тяжести голени 11, соответственно, даются как T(F1x, F1z), T(F2x, F2z) и T(a1x, a1z) в соответствии с системой обозначения составляющих в абсолютной системе Cf координат, а масса голени 11 дается как m2. В этом случае, уравнением движения переноса центра G2 тяжести голени 11 становится следующее уравнение (10).
T(m2·а2x, m2·a2z)=T(F1x-F2x, F1z-F2z-m2·g).
Следовательно,

В этом случае ускорение T(а2х, a2z) центра G2 тяжести голени 11 получают с помощью средства 33 для вычисления ускорения соответствующей части ноги. Кроме того, сила T(F1x, F1z) реакции сустава, действующая на лодыжку 12 на кончике голени 11, приблизительно равна расчетному значению силы реакции опоры, полученной с помощью вышеупомянутого средства 36 для оценки силы реакции опоры для ноги 2, имеющей голень 11. Более конкретно, в состоянии одного положения, если нога 2 находится на грунте, то сила T(F1x, F1z) реакции сустава является силой T(Fx, Fz) реакцией опоры, полученной посредством вышеупомянутого уравнения (2), и, если нога 2 является свободной ногой, то T(F1x, F1z)=T(0, 0). С другой стороны, в состоянии двух положений, если нога 2 является ногой на задней стороне человека 1, обращенной вперед в направлении движения вперед, то сила T(F1x, F1z) реакции сустава является силой T(Fx, Fz) реакции опоры вышеупомянутых уравнений (5), и если нога 2 является ногой передней стороны, то она является силой T(Ffx, Ffz) реакции опоры вышеупомянутых уравнений (5).
Таким образом, силу T(F2x, F2z) реакции сустава, действующую на коленном суставе 10 каждой ноги 2, определяют из данных ускорения T(а2x, a2z) центра G2 тяжести голени 11, получаемых с помощью средства 33 для вычисления ускорения соответствующей части ноги, данных о силе T(F1x, F1z) реакции опоры, получаемых с помощью средства 36 для оценки силы реакции опоры, данных массы mz голени, получаемых заранее, и значения ускорения g силы тяжести, при использовании вышеупомянутого уравнения (10).
Кроме того, как следует из фиг.11, дано, что момент, действующий на лодыжку 12 у кончика голени 11, равен M1, момент, действующий на часть коленного сустава 10 голени 11, равен М2, момент инерции вокруг центра G2 тяжести голени 11 равен IG2, а угловая скорость вокруг центра G2 тяжести голени равна α2. Кроме того, дано, что в соответствии с вышеупомянутой фиг.4 расстояние между центром G2 тяжести голени 11 и центром коленного сустава 10 составляет t2, а расстояние между центром G2 тяжести голени 11 и лодыжкой 12 составляет t2' (=Ld-t2), а уравнение движения для движения поворота вокруг центра G2 тяжести голени становится следующим уравнением (11).
IG2·α2=M1-M2+F1x·t2'·cosθd-F1z·t2'·sinθd+F2x·t2·cosθd-F2z·t2·sinθd.
Следовательно,

В этом случае M1 в уравнении (11) является моментом, получаемым как векторное произведение вектора точки приложения силы реакции опоры, получаемого с помощью вышеупомянутого средства 35 для оценки точки приложения силы реакции опоры по отношению к ноге 2, имеющей голень 11, относящегося к уравнению (11), и вектора силы реакции опоры, получаемого с помощью вышеупомянутого средства 36 для оценки силы реакции опоры по отношению к ноге 2. α2 является угловой скоростью голени 11, определяемой с помощью вышеупомянутого средства 34 для вычисления угловой скорости соответствующей части ноги. θd является углом отклонения голени 11, определяемым с помощью вышеупомянутого средства 28 для вычисления положения ноги. T(F1x, F1z) является, как описано выше, расчетным значением силы реакции опоры, получаемым с помощью вышеупомянутого средства 36 для оценки силы реакции опоры. Кроме того, T(F2x, F2z) получают с помощью вышеупомянутого уравнения (10). Момент IG2 инерции определяют заранее и хранят в арифметическом процессоре 16 вместе с данными массы m2 и размере голени 11 и так далее.
Таким образом, момент M2, действующий на коленный сустав 10, получают из данных расчетного значения силы реакции опоры, полученных с помощью средства 36 для оценки силы реакции опоры, данных вектора точки приложения силы реакции опоры, полученных с помощью средства 35 для оценки точки приложения силы реакции опоры, данных угловой скорости α2 голени 11, определенной с помощью средства 34 для вычисления угловой скорости соответствующей части ноги, данных угла θd отклонения голени 11, определенной с помощью средства 28 для вычисления положения ноги, данных силы T(F2x, F2z) реакции сустава, полученных с помощью вышеупомянутого уравнения (10), и данных момента IG2 инерции, размере Ld и положении t2 центра G2 тяжести голени 11, полученных заранее, используя вышеупомянутое уравнение (11).
После получения момента M2, действующего на часть коленного сустава 10 голени 11, как описано выше, средство 37 для оценки момента сустава в соответствии с обработкой данных, подобной обработке данных вычисления момента коленного сустава, вычисляет момент, действующий на часть тазобедренного сустава 8 бедра 9. Основная идея этой обработки данных аналогична методике получения момента M2 коленного сустава 10, и, таким образом, отпадает необходимость в ее подробной иллюстрации и объяснении. Ниже приведены основные ее принципы.
В частности, в начале получают силу T(F3х, F3z) реакции сустава, действующую на часть тазобедренного сустава 8 бедра 9, используя следующее уравнение (12) (уравнение аналогичного вида, что и вышеупомянутое уравнение (10)), основанное на уравнении движения для движения переноса центра G1 тяжести (смотри фиг.4) бедра 9.

В этом случае сила T(F2x, F2z) является силой реакции коленного сустава 10, полученной прежде с помощью вышеупомянутого уравнения (10). Ускорение T(a1x, a1z) является ускорением (ускорением переноса) центра G1 тяжести бедра 9 в абсолютной системе Cf координат, которое получают с помощью вышеупомянутого средства 33 для вычисления ускорения соответствующей части ноги. Кроме того, масса m1 является массой бедра 9, полученной заранее, а g является ускорением силы тяжести.
В таком случае получают момент M3, действующий на часть тазобедренного сустава бедра 9, используя следующее уравнение (13), основанное на уравнении движения для движения поворота вокруг центра G1 тяжести бедра 9.

В этом случае M2 является моментом коленного сустава 10, полученным с помощью вышеупомянутого уравнения (11), сила T(F2x, F2z) является силой реакции коленного сустава 10, полученной с помощью вышеупомянутого уравнения (10), сила T(F3x, F3z) является силой реакции тазобедренного сустава 8, полученной с помощью вышеупомянутого уравнения (12), IG2 является моментом инерции вокруг центра G1 тяжести бедра 9, полученным заранее, угловая скорость α1 является угловой скоростью бедра 9, полученной с помощью вышеупомянутого средства 34 для вычисления угловой скорости соответствующей части ноги, а θс является углом отклонения бедра 9, полученным с помощью вышеупомянутого средства 28 для вычисления положения ноги. Кроме того, расстояние t1 является расстоянием от центра тазобедренного сустава 8 до центра G1 тяжести бедра 9 (смотри фиг.4), а расстояние t1' является расстоянием от центра коленного сустава 10 до центра G1 тяжести бедра 9 (Lc-t1 на фиг.4), которые определяют на основе положения центра G1 тяжести и размера (длины) бедра 9, полученных заранее.
Обработку данных, описанную выше, последовательно выполняют на время цикла вышеупомянутого арифметического процессора 16, так что сила реакции опоры, действующая на каждую ногу 2, и моменты, действующие на коленный сустав 10 и тазобедренный сустав 9 каждой ноги 2, последовательно оценивают в реальном масштабе времени.
Хотя в этой заявке и не приведено подробного описания, но полученные расчетные значения моментов, действующих на коленных суставах 10 и тазобедренных суставах 8, используют для управления, например, устройства, способствующего ходьбе человека 1 (устройство содержит электрические двигатели или аналогичные исполнительные механизмы, которые могут прикладывать вспомогательные крутящие моменты к коленным суставам 10 и тазобедренным суставам 8).
Состояния временных изменений расчетных значений сил реакции опоры (в частности, абсолютных величин расчетных значений сил реакции опоры), полученных посредством вышеупомянутой обработки данных арифметического процессора 16, показаны на фиг.12-14 сплошными линиями. Кроме того, состояния временных изменений расчетных значений моментов на коленном суставе 10 и тазобедренном суставе 8, полученных посредством обработки данных арифметического процессора 16, показаны на фиг.15 сплошными линиями. В этом случае, на фиг.12 и фиг.15 приведены иллюстрации, в которых человек 1 идет по плоской площадке по существу с постоянной скоростью, на фиг.13 приведена иллюстрация, в которой человек 1 идет вверх по лестнице, а на фиг.14 приведена иллюстрация, в которой человек 1 встает из состояния сидения на стуле. На фиг.12-14 штрихпунктирными линиями также иллюстрируются сравнительные примеры (соответствующие истинным значениям сил реакции опоры), полученные посредством фактического измерения сил реакции опоры при использовании измерителя силы или аналогичного измерительного прибора. Кроме того, на фиг.15 штрихпунктирными линиями также иллюстрируются сравнительные примеры (соответствующие истинным значениям моментов на коленном суставе 10 и тазобедренном суставе 8), полученные посредством фактического измерения моментов на коленном суставе 10 и тазобедренном суставе 8 при использовании измерителя крутящего момента или аналогичного измерительного прибора.
Из фиг.12-14 становится очевидным, что в соответствии с настоящим изобретением точные расчетные значения сил реакции опоры получены независимо от типа движения окружающей среды ног 2. Кроме того, в настоящем варианте осуществления, как показано на фиг.15, моменты на коленном суставе 10 и тазобедренном суставе 8 могут быть также оценены с относительно высокой точностью при использовании расчетных значений сил реакции опоры.
Как описано выше, в соответствии с этим вариантом осуществления представляется возможным просто оценить в реальном масштабе времени силу реакции опоры, действующую на тазобедренный сустав 8 и коленный сустав 10 каждой ноги 2, при использовании относительно небольших и легких датчиков, например датчиков 22 и 23, прикрепленных к тазобедренным суставам 8 и коленным суставам 10, соответственно, и гиродатчиков 14 и 19 и измерителей 15, 20 и 21, прикрепленных к туловищу 5, без крепления таких датчиков к ногам 2, так как это препятствует ходьбе человека или создает нагрузки для движения ног 2. Кроме того, такая оценка может быть выполнена с относительно высокой точностью независимо от типа движения или окружающей среды движения ног 2, то есть идет ли человек по плоской площадке, поднимается ли по лестнице и так далее.
В варианте осуществления, который был описан выше, описание было дано для случая, взятого в качестве примера, в котором настоящее изобретение применяется для человека 1. Однако настоящее изобретение применимо также к двуногому шагающему роботу, взятому в качестве двуногого шагающего движущегося тела. Здесь, в случае двуногого шагающего робота, он может иметь конструкцию, в которой талия и грудная клетка выполнены как одно целое. В этом случае представляется возможным прикрепить гиродатчик и измеритель ускорения в направлении вперед-назад к талии или грудной клетке и оценивать силы реакции опоры и моменты на суставах ног аналогичным образом, как это делается в настоящем варианте осуществления изобретения. Кроме того, в случае двуногого шагающего робота также представляется возможным определять углы сгибания тазобедренных суставов и коленных суставов на основе управляющих величин контроллера для исполнительных механизмов этих суставов.
В вышеупомянутом варианте осуществления данные детектирования измерителя 21 ускорения талии в направлении вверх-вниз используют для оценки состояния движения ног 2. Однако вместо таких данных детектирования можно использовать, например, составляющие ускорения а0 талии 3 в вертикальном направлении (в направлении оси Z) в абсолютной системе Cf координат, которые получают с помощью вышеупомянутого средства 27 для измерения опорного ускорения.
Промышленная применимость
Как описано выше, настоящее изобретение является пригодным при осуществлении содействия ходьбе или регулирования ходьбы двуногого шагающего движущегося тела, например человека или робота, при этом могут быть определены силы реакции опоры и моменты суставов, действующие на ноги движущегося тела.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ РЕАКЦИЙ ОПОРЫ И СПОСОБ ОЦЕНКИ МОМЕНТОВ СУСТАВОВ ДВУНОГОГО ШАГАЮЩЕГО ТЕЛА | 2002 |
|
RU2296668C2 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| СИСТЕМА СООБЩЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2002 |
|
RU2271176C2 |
| ВЗРЫВОЗАЩИЩЕННЫЙ ШАГАЮЩИЙ РОБОТ | 2023 |
|
RU2832153C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| ШАГАЮЩИЙ РОБОТ | 2001 |
|
RU2251480C2 |
| Способ оценки функционального состояния сочленений конечностей | 1979 |
|
SU933075A1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ КОЛЕННЫМ СУСТАВОМ | 2020 |
|
RU2814943C2 |
| СПОСОБ БИОМЕХАНИЧЕСКОЙ И ЭЛЕКТРОМИОГРАФИЧЕСКОЙ ОЦЕНКИ ТЯЖЕЛОАТЛЕТИЧЕСКИХ УПРАЖНЕНИЙ | 2020 |
|
RU2756567C1 |
| СПОСОБ ОЦЕНКИ ВЛИЯНИЯ ВПИТЫВАЮЩЕГО ИЗДЕЛИЯ НА ПОХОДКУ | 2021 |
|
RU2817318C1 |
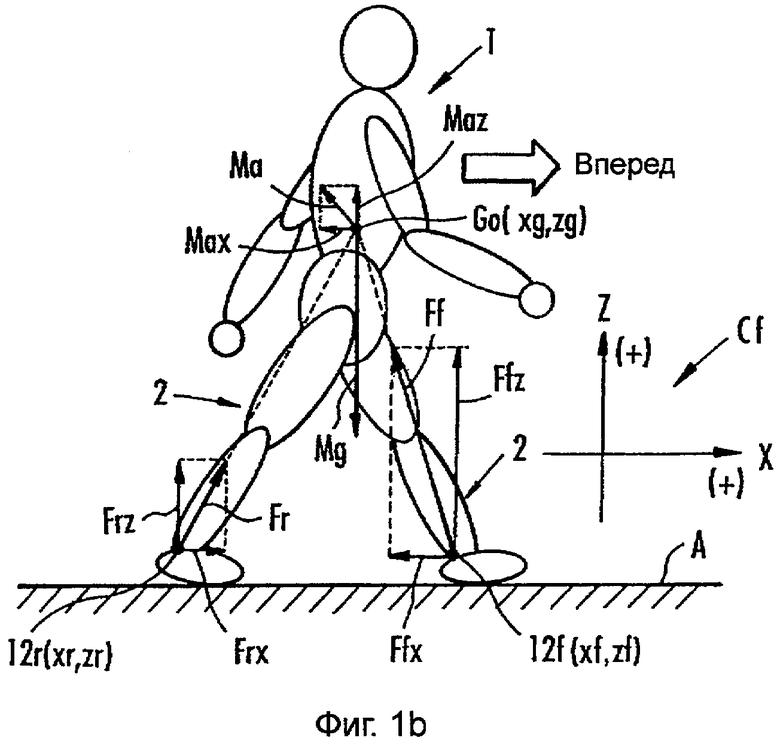
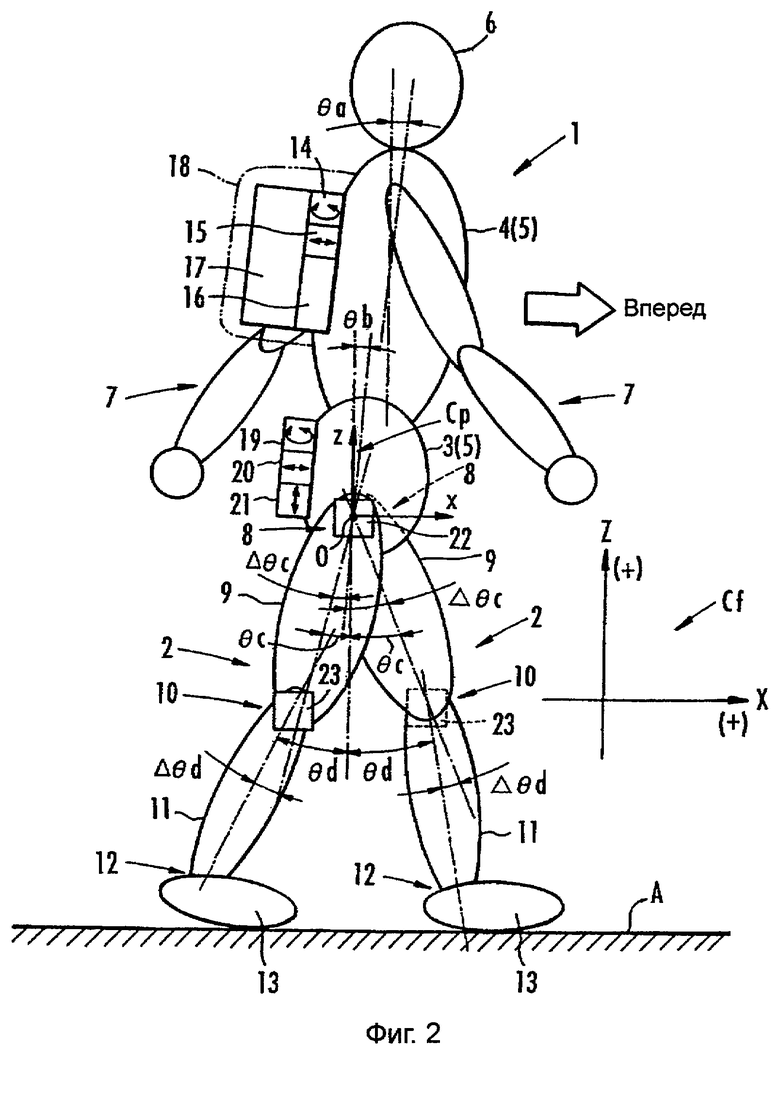
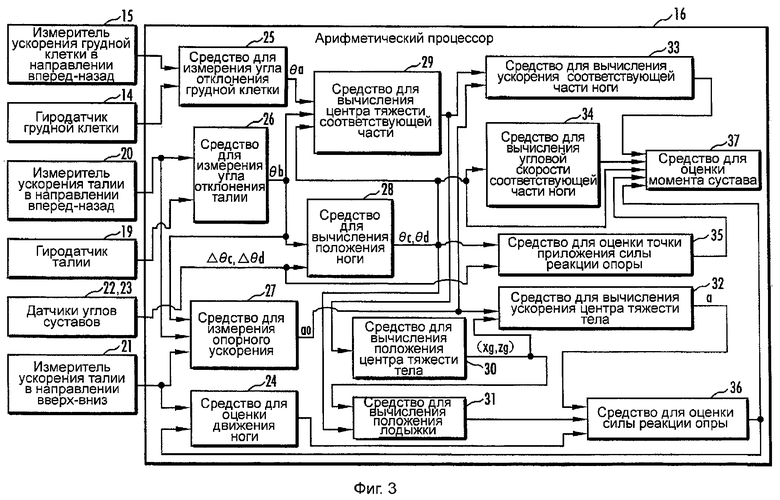
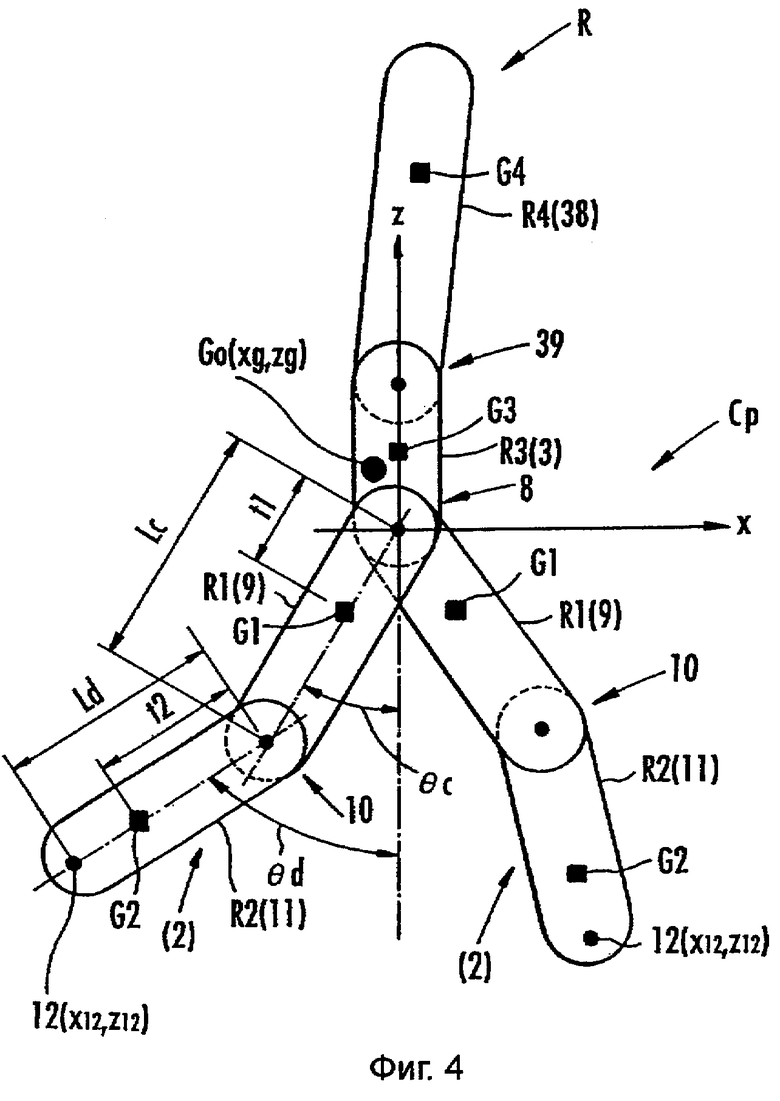
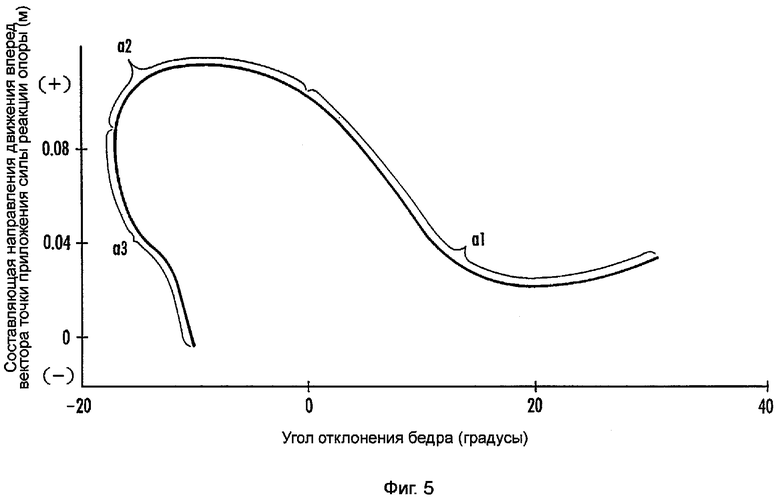
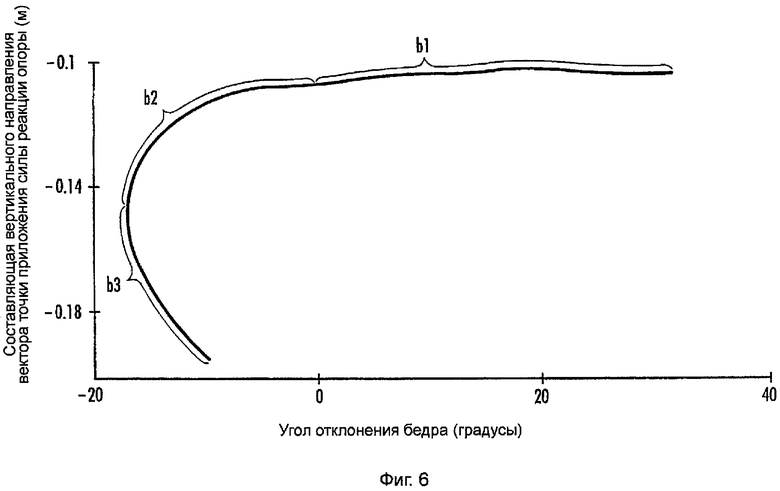
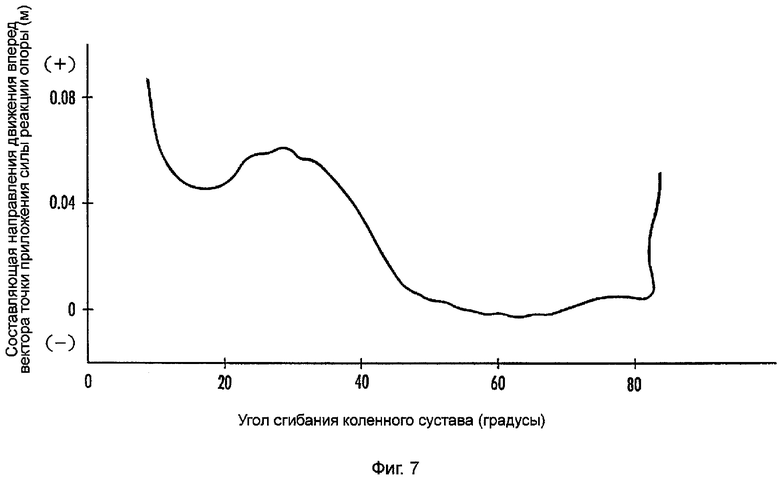
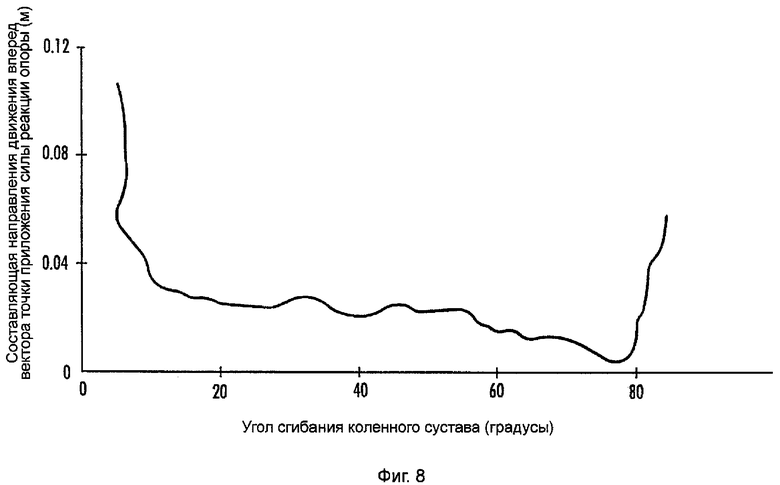
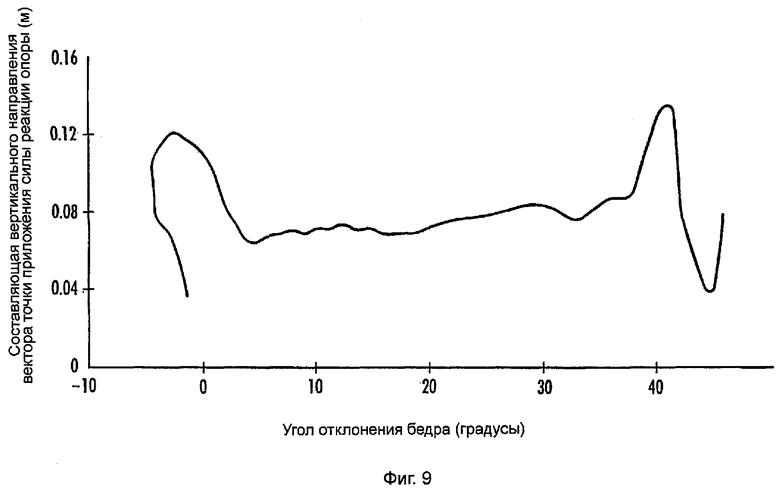
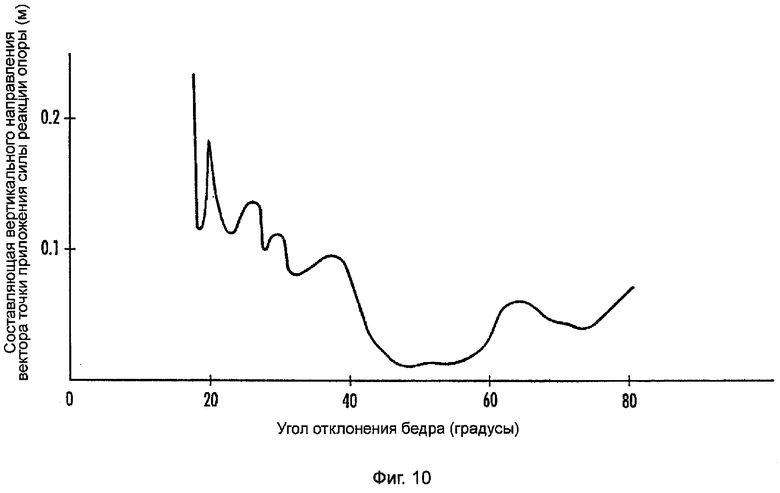
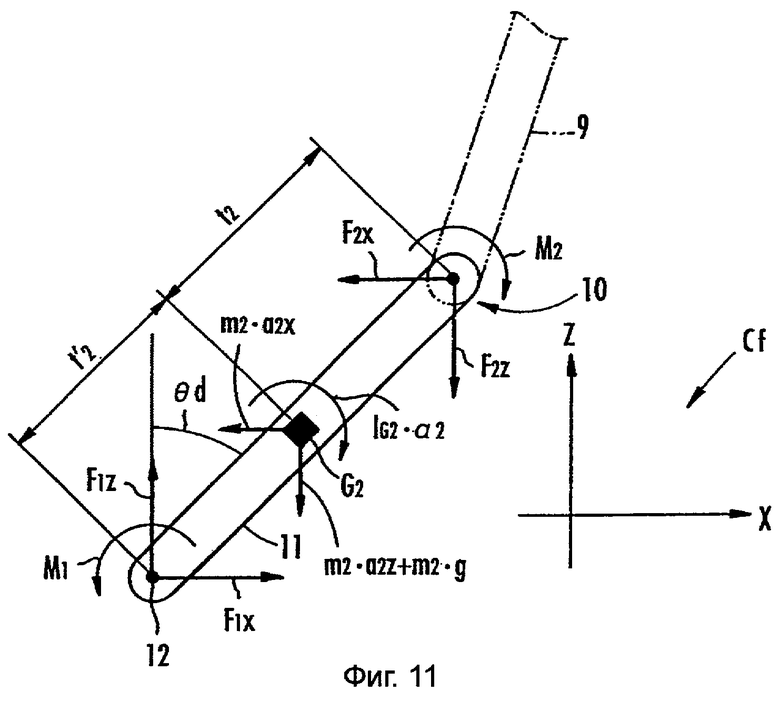
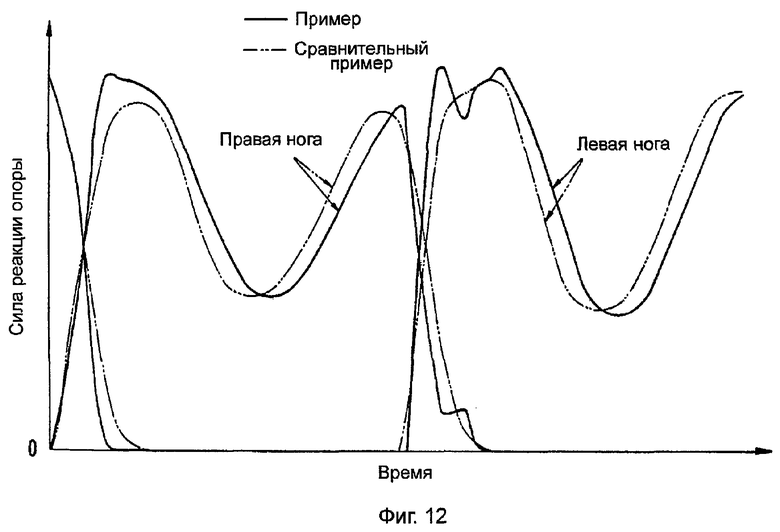
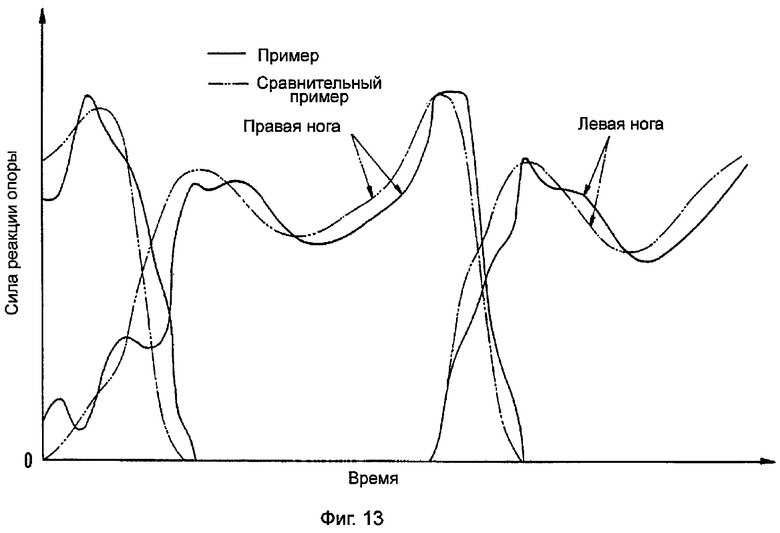
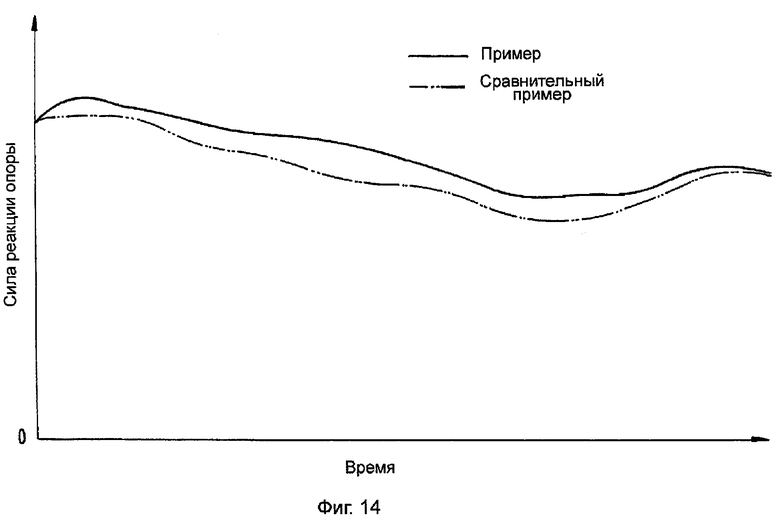
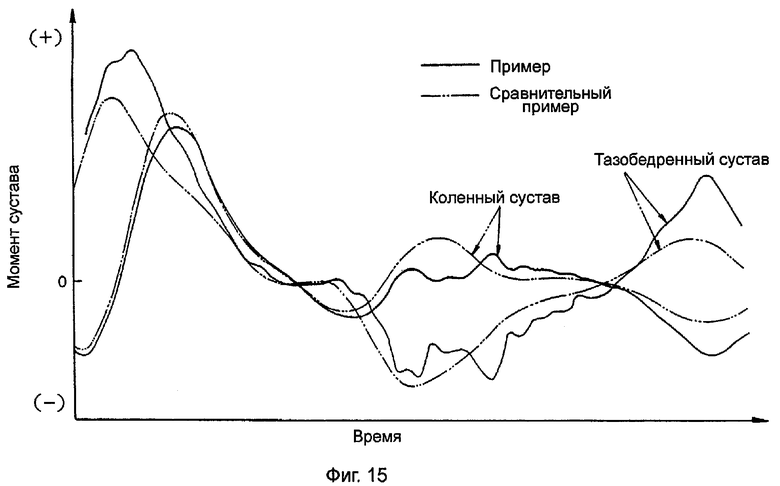
Изобретение относится к измерительной технике и может быть использовано для измерения сил реакций опоры, действующих на ноги шагающих движущихся тел, и оценке сил, действующих на суставы ног этих движущихся тел. Способ заключается в оценке реакции опоры в зависимости от числа ног тела, касающихся опоры. Расчетные значения вышеупомянутых сил реакции опоры получают с помощью методик, зависящих от соответствующих опорных состояний. Например, для состояния одноопорного положения двуногого шагающего движущегося тела расчетное значение силы реакции опоры получают из значения массы, ускорения силы тяжести и ускорения центра тяжести двуногого шагающего движущегося тела. Для состояния двухопорного положения двуногого шагающего движущегося тела расчетные значение силы реакции опоры получают из значения массы, ускорения силы тяжести и ускорения центра тяжести двуногого шагающего движущегося тела и положения конкретной части каждой ноги относительно центра тяжести. Способ оценки моментов суставов двуногого шагающего тела реализуется при использовании модели обратной динамики и учете расчетных значений сил реакции опоры. Технический результат заключается в определении сил реакции опоры, действующих на ноги двуногого шагающего движущегося тела, и моментов, действующих на суставы ног, в реальном масштабе времени. 3 н. и 6 з.п. ф-лы, 15 ил.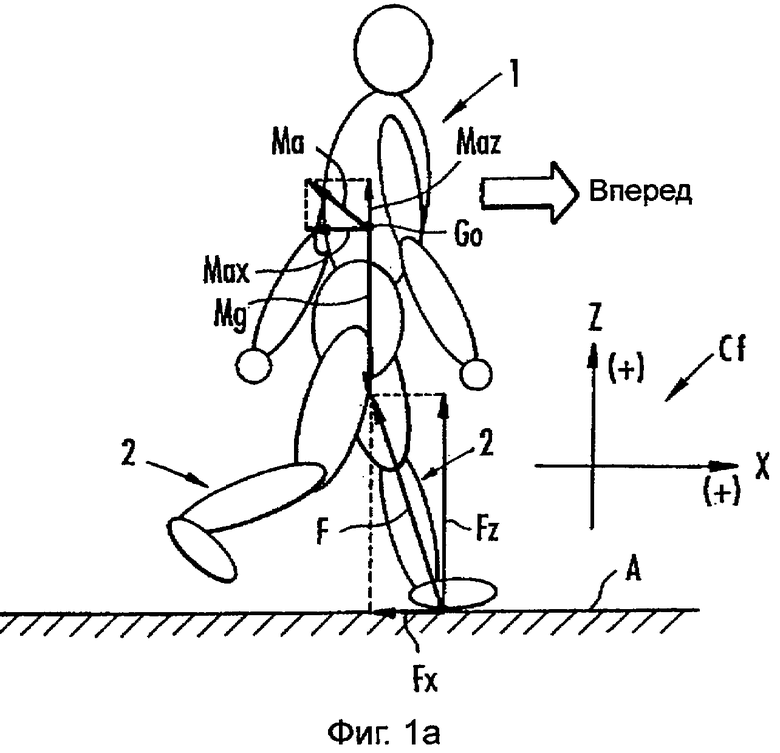
первый этап оценки того, является ли состояние движения ног указанного двуногого шагающего движущегося тела состоянием одного положения, в котором только одна из ног касается грунта, или состоянием двух положений, в котором обе ноги касаются грунта;
второй этап последовательного определения положений центра тяжести указанного двуногого шагающего движущегося тела и последовательного определения ускорений указанного центра тяжести в абсолютной системе координат, зафиксированной относительно грунта, путем использования данных временного ряда положений указанного центра тяжести;
третий этап последовательного определения положений конкретной части относительно указанного центра тяжести, по меньшей мере, в указанном состоянии двух положений, причем указанная конкретная часть предварительно определена в окрестности нижней концевой части каждой ноги;
этап получения расчетных значений указанной силы реакции опоры, действующей на ногу, касающуюся грунта, последовательно, в состоянии одного положения указанного двуногого шагающего движущегося тела на основе уравнения движения для указанного центра тяжести, выражаемого с помощью массы и ускорения силы тяжести двуногого шагающего движущегося тела, ускорения указанного центра тяжести и указанной силы реакции опоры, действующей на ногу, касающуюся грунта;
этап получения расчетных значений указанных сил реакции опоры, действующих на обе ноги, последовательно, в состоянии двух положений указанного двуногого шагающего движущегося тела на основе уравнения движения для указанного центра тяжести, выраженного с помощью массы и ускорения силы тяжести двуногого шагающего движущегося тела, ускорения указанного центра тяжести и указанных сил реакций опоры, действующих на обе ноги, и выражения зависимости между положением указанной конкретной части каждой ноги относительно указанного центра тяжести и указанной силы реакции опоры, действующей на указанную ногу, причем указанное выражение зависимости определяют на основе допущения, что указанная сила реакции опоры, действующая на каждую ногу, действует из указанной конкретной части указанной ноги к указанному центру тяжести.
этап соответствующего измерения угла отклонения тела, поддерживаемого на обеих ногах посредством тазобедренного сустава каждой ноги, углов сгибания, по меньшей мере, тазобедренного сустава и коленного сустава каждой ноги и ускорения заданной опорной точки указанного двуногого шагающего движущегося тела в указанной абсолютной системе координат;
этап последовательного определения углов отклонения соответствующих частей соответствующего жесткого тела двуногого шагающего движущегося тела, соответствующих соответствующим жестким телам указанной модели связи жестких тел, на основе угла отклонения указанного тела, углов сгибания соответственно указанного тазобедренного сустава и указанного коленного сустава каждой ноги и модели связи жестких тел, образованной путем представления указанного двуногого шагающего движущегося тела как связного тела из множества жестких тел;
этап последовательного определения положений центров тяжести соответствующих частей соответствующего жесткого тела относительно указанной опорной точки на основе углов отклонения указанных соответствующих частей соответствующего жесткого тела, предварительно определенных масс соответствующих частей соответствующего жесткого тела и положений предварительно определенных центров тяжести соответствующих частей жесткого тела, в соответствующих частях соответствующего жесткого тела и последовательного определения ускорений центров тяжести соответствующих частей соответствующего жесткого тела относительно указанной опорной точки на основе данных временного ряда положений центров тяжести соответствующих частей соответствующего жесткого тела:
этап последовательного определения ускорений центров тяжести соответствующих частей соответствующего жесткого тела в указанной абсолютной системе координат из ускорений центров тяжести соответствующих частей соответствующего жесткого тела относительно указанной опорной точки и ускорений указанной опорной точки в указанной абсолютной системе координат;
этап последовательного определения угловых скоростей соответствующих частей соответствующего жесткого тела на основе данных временного ряда углов отклонения соответствующих частей соответствующего жесткого тела;
этап последовательного определения расчетных положений точки приложения силы реакции опоры каждой ноги в указанном двуногом шагающем движущемся теле на основе, по меньшей мере, угла отклонения бедра указанной ноги и угла сгибания коленного сустава указанной ноги в качестве соответствующих частей жесткого тела указанного двуногого шагающего движущегося тела и
этап оценки момента, действующего, по меньшей мере, на один из суставов каждой ноги указанного двуногого шагающего движущегося тела на основе модели обратной динамики при использовании расчетных значений указанной силы реакции опоры, расчетного положения указанной точки приложения силы реакции опоры, ускорений центров тяжести соответствующих частей соответствующего жесткого тела и угловых скоростей указанных соответствующих частей соответствующего жесткого тела в указанной абсолютной системе координат, углов отклонения соответствующих частей соответствующего жесткого тела, предварительно определенных масс и размеров соответствующих частей соответствующего жесткого тела, положений предварительно определенных центров тяжести соответствующих частей жесткого тела в соответствующих частях соответствующего жесткого тела, и предварительно определенных моментов инерции соответствующих частей соответствующего жесткого тела.
этап последовательного определения углов отклонения в указанной абсолютной системе координат соответствующих частей соответствующего жесткого тела двуногого шагающего движущегося тела, соответствующих жестким телам указанной модели связи жестких тел, на основе угла отклонения указанного тела, углов сгибания соответственно указанного тазобедренного сустава и указанного коленного сустава каждой ноги и указанной модели связи жестких тел;
этап последовательного определения положений центров тяжести соответствующих частей соответствующего жесткого тела относительно указанной опорной точки на основе углов отклонения указанных соответствующих частей соответствующего жесткого тела, предварительно определенных масс соответствующих частей соответствующего жесткого тела и положений центров тяжести соответствующих частей жесткого тела в соответствующих частях соответствующего жесткого тела и последовательного определения ускорений центров тяжести соответствующих частей соответствующего жесткого тела относительно указанной опорной точки на основе данных временного ряда положений центров тяжести соответствующих частей соответствующего жесткого тела;
этап последовательного определения ускорений центров тяжести соответствующих частей соответствующего жесткого тела в указанной абсолютной системе координат из ускорений центров тяжести соответствующих частей соответствующего жесткого тела относительно указанной опорной точки и ускорений указанной опорной точки в указанной абсолютной системе координат;
этап последовательного определения угловых скоростей соответствующих частей соответствующего жесткого тела на основе данных временного ряда углов отклонения соответствующих частей соответствующего жесткого тела;
этап последовательного определения расчетных положений точки приложения силы реакции опоры каждой ноги в указанном двуногом шагающем движущемся теле на основе, по меньшей мере, угла отклонения бедра указанной ноги и угла сгибания коленного сустава указанной ноги в качестве соответствующих частей жесткого тела указанного двуногого шагающего движущегося тела и
этап оценки момента, действующего, по меньшей мере, на один из суставов каждой ноги указанного двуногого шагающего движущегося тела на основе модели обратной динамики при использовании расчетного значения указанной силы реакции опоры, расчетного положения указанной точки приложения силы реакции опоры, ускорений центров тяжести соответствующих частей соответствующего жесткого тела и угловых скоростей указанных соответствующих частей соответствующего жесткого тела в указанной абсолютной системе координат, углов отклонения соответствующих частей соответствующего жесткого тела, предварительно определенных масс и размеров соответствующих частей соответствующего жесткого тела, положений предварительно определенных центров тяжести соответствующих частей жесткого тела в соответствующих частях соответствующего жесткого тела и предварительно определенных моментов инерции соответствующих частей соответствующего жесткого тела.
| US 5404086 А, 04.04.1995 | |||
| Установка для определения гидродинамических характеристик модели плавсредства | 1983 |
|
SU1120203A1 |
| Протез бедра | 1985 |
|
SU1319846A1 |

