Предлагаемое изобретение относится к области судовождения, в частности к системам автоматического управления движением морскими судами.
Известно устройство (А. С. СССР 460535), обеспечивающее автоматическое удержание судна на заданном курсе. Стабилизация курса осуществляется по данным гирокомпаса, который является основным источником информации о направлении движения судна. Сигнал текущего курса и его производная поступают на вход суммирующего усилителя, где формируется пропорционально-дифференциальный (ПД) закон управления рулевым приводом.
Рассматриваемый авторулевой обладает следующими недостатками:
- перегружает рулевой привод при появлении на море волнения,
-сигнал курса, снимаемый с гирокомпаса, имеет запаздывание, что снижает запас устойчивости замкнутой системы "судно - авторулевой", т.к. сигнал производной формируется путем дифференцирования сигнала курса, вырабатываемого гирокомпасом,
- появление ошибки при движении судна по заданному курсу и траектории при боковом ветре и волнении.
Известно устройство управления движением судна (А.С. СССР 979204, кл. B 63 H 25/04), принятое нами в качестве прототипа, содержащее датчик и задатчик направления движения, датчик угла перекладки руля, датчик угловой скорости судна, выходы которых подключены через суммирующий усилитель к рулевому приводу. Недостатки рассмотренного выше аналога присущи также и прототипу, кроме снижения запаса устойчивости.
Задача, решаемая настоящим изобретением, - создание аппаратуры для автоматического управления движением судна с использованием информации от приемоиндикатора спутниковой навигационной системы (СНС) и блока оценки, что позволило:
- повысить точность удержания судна при движении по заданной траектории как при спокойном море, так и при сильном волнении на море и повысить надежность и безотказность устройства.
Поставленная задача достигается тем, что в устройство, содержащее датчик отклонения руля, датчик угловой скорости, задатчик путевого угла, рулевой привод и суммирующий усилитель, дополнительно введены: приемоиндикатор, множитель, сумматор и блок оценки состояния судна, содержащий: три интегратора, три сумматора, соединенные между собой в соответствии с чертежом.
Существенной новизной предлагаемого изобретения является формирование закона управления движением судна не по углу курса, а по путевому углу (ПУ), что достигается использованием приемоиндикатора СНС:
- введением сигнала бокового сноса судна (У),
- использованием в законе управления сигналов оценки угловой скорости судна (ω), оценки приращения путевого угла (ПУ) и оценки бокового сноса судна (У).
Функциональная схема предлагаемого изобретения приведена на чертеже.
Устройство управления движением судна состоит из датчика отклонения руля 1, датчика угловой скорости 2, задатчика путевого угла 3, суммирующего усилителя 4, рулевого привода 5, приемоиндикатора СНС 6, блока оценки состояния 7, множителя 8, четырех сумматоров 9-12, трех интеграторов 13-15 и объект управления - судно 16.
В качестве датчика отклонения руля 1 задатчика путевого угла 3, может быть использован любой аналоговый (цифровой) преобразователь угла поворота в электрический сигнал с точностью не хуже 1-3 %. В аналоговом варианте реализации аппаратуры в качестве усилителя 4 можно использовать интегральную микросхему типа 140-УД-6.
Датчик угловой скорости 2 - серийно выпускаемый датчик типа ДУС-5. Приемоиндикатор 6 спутниковой навигационной системы (СНС) типа "Волонтер". Множитель 8 - интегральная микросхема с точностью решения 3-5 %. Сумматоры 9-12 реализуются на микросхемах типа 140-УД-6. Интеграторы 13-15 - на микросхемах типа 140-УД-8.
Возможен также вариант реализации предложенной аппаратуры на элементах цифровой техники.
Устройство работает следующим образом.
Требуемое направление движения судна задается задатчиком 3. Если это направление не совпадает с текущим направлением движения судна, то на выходе суммирующего усилителя 4 появится сигнал, приводящий к отклонению пера руля судна рулевым приводом 5, при этом начнется поворот судна к заданному направлению движения. При достижении судном заданного направления движения перо руля вернется в нулевое положение.
Рассмотрим, как формируется закон управления рулевым приводом. Сигнал, пропорциональный текущему направлению движения судна, вырабатывается приемоиндикатором (ПИ) 6 и поступает на первый вход четвертого сумматора 12, на второй вход которого поступает сигнала с задатчика 3. На выходе сумматора 12 формируется сигнал отклонения судна от заданного направления движения (ПУ-ПУ зад. ), который используется для корректировки оценки отклонения путевого угла, которая вырабатывается на выходе второго интегратора 14  Этот сигнал поступает на первый вход второго сумматора 10, а на второй вход которого - сигнал с выхода четвертого сумматора 12. На выходе сумматора 10 формируется сигнал невязки
Этот сигнал поступает на первый вход второго сумматора 10, а на второй вход которого - сигнал с выхода четвертого сумматора 12. На выходе сумматора 10 формируется сигнал невязки  для коррекции выхода второго интегратора 14. Сигнал угловой скорости (ω) с датчика 2 поступает на вход блока оценивания 7 для формировании на третьем сумматоре 11 сигнала невязки для коррекции оценки угловой скорости, вырабатываемой на выходе первого интегратора 13
для коррекции выхода второго интегратора 14. Сигнал угловой скорости (ω) с датчика 2 поступает на вход блока оценивания 7 для формировании на третьем сумматоре 11 сигнала невязки для коррекции оценки угловой скорости, вырабатываемой на выходе первого интегратора 13  Для коррекции оценки бокового отклонения на сумматоре 9 формируется невязка
Для коррекции оценки бокового отклонения на сумматоре 9 формируется невязка  путем алгебраического суммирования сигналов (У) - с приемо-индикатора 6 и
путем алгебраического суммирования сигналов (У) - с приемо-индикатора 6 и  с выхода третьего интегратора 15.
с выхода третьего интегратора 15.
Для формирования перечисленных выше оценок на вход блока 7 поступает сигнал произведения угла отклонения руля на скорость хода судна с множителя 8. На первый - четвертый входы суммирующего усилителя 4 поступают:
- сигнал отклонения руля сдатчика 1,
- три выхода с блока оценивания 7.
Таким образом на выходе усилителя 4 формируется сигнал, пропорциональный скорости перекладки руля, который и поступает на вход рулевого привода 5: , (1)
, (1)
где:  отклонение оценки путевого угла,
отклонение оценки путевого угла,
δ - угол перекладки руля, - оценка угловой скорости судна,
- оценка угловой скорости судна, оценка бокового отклонения,
оценка бокового отклонения,
K1...4 - коэффициенты регулирования.
Реализация закона (1) позволяет автоматизировать процесс управления движением судна по заданному направлению, причем сигнал оценки угловой скорости судна не содержит высокочастотных возмущений от морского волнения, в нем также отсутствует запаздывание, возникающее при дифференцировании сигнала угла курса, вырабатываемого гирокомпасом.
В предложенном устройстве управления движением судна стабилизация и управление кораблем осуществляется в соответствии (1) по более сложному закону, чем в прототипе:
- добавлен член 
- введены оценки 
Это создает более точное движение по заданной траектории (обеспечивается астатизм к внешним боковым возмущениям) и существенно снижает загрузку рулевого привода при волнении на море.
Формирование оценок.
Оценки бокового сноса, отклонения путевого угла и скорости изменения углового направления движения судна вырабатываются на трех интеграторах 15, 14, 13 и трех сумматорах 9, 10, 11 в блоке оценивания 7.
На вход первого интегратора 13 поступает три сигнала: , (2)
, (2)
где K1, K2 - коэффициенты, определяемые гидродинамикой судна,
KЗ - коэффициент фильтра Калмана.
δ - угол перекладки руля,
V - скорость хода судна.
 оценка угловой скорости,
оценка угловой скорости, невязка оценки угловой скорости.
невязка оценки угловой скорости.
На вход второго интегратора 14 поступает сигнал оценки угловой скорости судна и сигнал невязки оценки отклонения путевого угла от измеренного значения: , (3)
, (3)
где K4 - коэффициент фильтра Калмана, невязка оценки отклонения путевого угла.
невязка оценки отклонения путевого угла.
Оценка бокового отклонения судна вырабатывается на выходе третьего интегратора 15, на вход которого поступают сигналы: ), (4)
), (4)
где K5 - коэффициент фильтра Калмана, невязка оценки бокового отклонения,
невязка оценки бокового отклонения,
K = V1.
Проведенное моделирование закона управления (1) с использованием оценок, выработанных в блоке 7, подтвердило получение высокого качества управления и стабилизации судна на заданной траектории движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2211172C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВОЗМУЩЕНИЙ | 2012 |
|
RU2492105C1 |
Изобретение относится к области судостроения и предназначено для реализации управления движением морского судна. Устройство содержит датчик отклонения руля, датчик угловой скорости, задатчик путевого угла, суммирующий усилитель и рулевой привод. Дополнительно введены приемоиндикатор спутниковой навигационной системы, блок оценки состояния, состоящий из трех сумматоров и трех интеграторов, множитель и четвертый сумматор. Для формирования закона управления рулевым приводом используются оценки фазового состояния судна. Устройство обеспечивает повышенную точность удержания судна при движении по заданной траектории как при спокойном море, так и при сильном волнении на море, а также повышенную эксплуатационную надежность. 1 ил.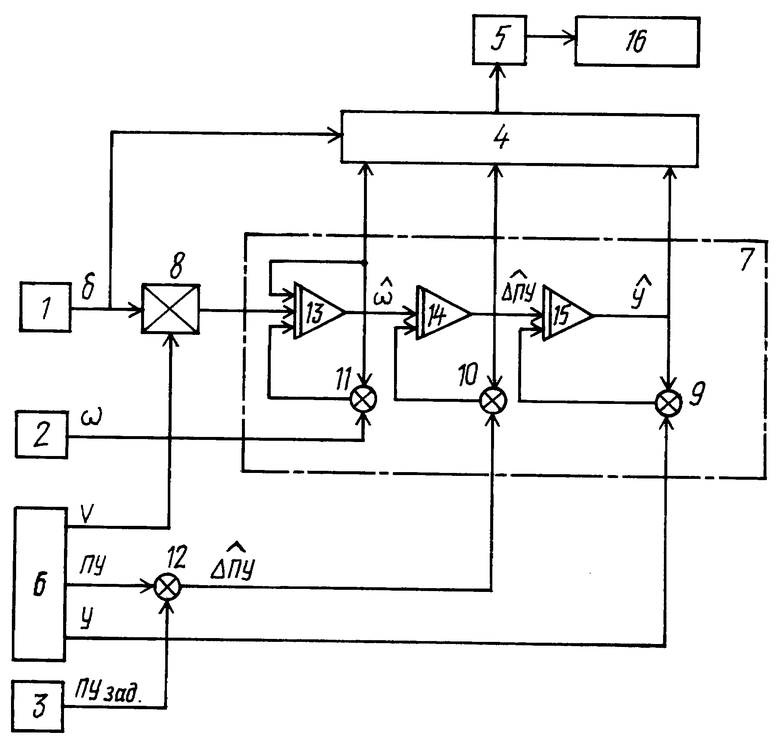
Устройство управления движением судна, содержащее датчик отклонения руля, датчик угловой скорости, задатчик путевого угла, суммирующий усилитель и рулевой привод, к первому входу суммирующего усилителя подключен выход датчика отклонения руля, а выход суммирующего усилителя соединен с рулевым приводом, отличающееся тем, что дополнительно содержит приемоиндикатор, блок оценки состояния, состоящий из трех сумматоров и трех интеграторов, множитель и четвертый сумматор, датчик отклонения руля через множитель и последовательно соединенные первый и второй интеграторы соединен с первым входом третьего интегратора, выход которого подключен к второму входу суммирующего усилителя и через первый сумматор соединен с вторым входом третьего интегратора, выход второго интегратора подключен к третьему входу суммирующего усилителя и через второй сумматор соединен с вторым входом второго интегратора, выход первого интегратора подключен к четвертому входу суммирующего усилителя и через третий сумматор соединен с вторым входом первого интегратора, выход которого соединен с третьим входом этого же интегратора, вторые входы первого, второго и третьего сумматоров соединены соответственно с первым выходом приемоиндикатора, выходом четвертого сумматора и выходом датчика угловой скорости, входы четвертого сумматора подключены соответственно к выходу задатчика путевого угла и к второму выходу приемоиндикатора, третий выход которого соединен с вторым входом множителя.
| Устройство управления движением судна | 1981 |
|
SU979204A1 |
| Предохранительный элемент устройства для скрепления стопы строительных изделий, имеющих форму рамы | 1989 |
|
SU1654143A1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
