Способ относится к судовождению и может быть также использован в картографии, геодезии и при проведении работ, связанных с построением карт при исследованиях различных геофизических процессов.
Известен способ представления судоводителю обобщенной информации для контроля и управления движением судна [1], заключающийся в том, что определяют курсы, скорости и пеленги встречных судов и дистанцию для каждого из встречных судов, по которым вычисляют реальные области чрезмерного сближения судов для индикации их на дисплее судоводителя, в котором для собственного и каждого из встречных судов определяют отношения скоростей, заданных безопасных и текущих дистанций до встречных целей, разность курсов и элементы движения судов, по которым определяют путем топологического анализа возможный вид и форму области чрезмерного сближения с каждым из встречных судов, а реальный вид и форму соответствующей области сближения определяют путем формирования информационных массивов координат точек границ области, инициируя ее на дисплее маркером соответствующего цвета в виде геометрической фигуры, ограниченной непрерывными плавными кривыми, причем число информационных массивов выбирают соответствующим возможному числу упомянутых кривых, при этом инициируют информацию о курсе и скорости встречного судна как вектор абсолютной скорости и формуляр цели, обеспечивая совпадение цвета, соответствие номера цели, дистанцию сближения и запас времени для принятия решения определяют с помощью сформированных электронного визира и подвижного круга дальности, а курс расхождения инициируют на дисплее в явном виде. Для реализации способа используют штатные РЛС кругового обзора, лаг и курсоуказатель.
Недостатком известного способа является то, что на экране дисплея индицируется вектор абсолютной скорости встречных целей (судов), т.е. задача расхождения с опасными целями решается относительно встречных судов, без учета навигационной обстановки по левому и правому бортам, и корме собственного судна. В то же время, задача безопасного расхождения складывается из расчета возможности безопасного обхода опасных целей путем маневрирования с учетом реальной навигационной и гидрометеорологической обстановки.
Кроме того, изображение на дисплее границ опасных областей в виде геометрической фигуры, ограниченной непрерывными плавными кривыми, на основе топологического анализа возможных опасных областей по рассчитанным соотношениям скоростей собственного и встречного судов, соотношениям безопасной и текущей дистанций, элементам движения цели и разности курсов с использованием маркера, особенно в районах интенсивного судоходства, потребует от судоводителя приложения невероятных усилий для решения данной задачи, а при изменении скорости и курса одновременно несколькими судами данная задача практически невыполнима.
Задачей предлагаемого технического решения является снижение рабочей нагрузки судоводителя, а также повышение достоверности отображения графической информации и эффективности восприятия этой информации.
Поставленная задача решается за счет того, что в способе представления судоводителю обобщенной информации для контроля и управления движением судна, заключающемся в том, что определяют курсы, скорости и пеленги встречных судов и дистанцию для каждого из встречных судов, при этом вычисляют реальные области чрезмерного сближения судов для индикации их на дисплее судоводителя, в котором для собственного и каждого из встречных судов определяют отношения скоростей, заданных безопасных и текущих дистанций до встречных целей, разность курсов и элементы движения судов, по которым определяют путем анализа возможный вид и форму области чрезмерного сближения с каждым из встречных судов, а реальный вид и форму соответствующей области сближения определяют путем формирования информационных массивов координат точек границ области, инициируя ее на дисплее соответствующим цветом в виде геометрической фигуры, ограниченной непрерывными линиями, причем число информационных массивов выбирают соответствующим возможному числу упомянутых линий, при этом инициируют информацию о курсе и скорости встречного судна как вектор абсолютной скорости и формуляр цели, обеспечивая совпадение цвета и соответствующего номера цели, дистанцию сближения и запас времени для принятия решения определяют с помощью сформированных электронного визира (маркера) и подвижного круга дальности, а курс расхождения инициируют на дисплее в явном виде путем обработки информации, вырабатываемой судовыми РЛС кругового обзора, лагом и курсоуказателем, в котором определяют маневренные характеристики судов путем построения площадей занимаемых судами при маневрировании, при этом определяют траекторию движения центра тяжести, носовой и кормовой оконечностей, рассчитывают вектор сноса судна течением за время циркуляции tц:ST=VT·tц, где VT - скорость течения, рассчитывают углы дрейфа для самых неблагоприятных условий, определяют вектор сноса судна ветром SB для каждого судна, посредством электронного маркера строят безопасные зоны движения судов, при этом текущие координаты судов являются центрами окружностей с радиусами безопасных зон движения судов, длина которых соответствует длине занимаемой площади при маневрировании судна влево и вправо, расстояние от своего судна до опасной зоны определяют путем построения метрики Хаусдорфа посредством графопостроителя в соответствии с выражением:
R=min{||х-у||:у∈А},
где R - расстояние между собственным судном и множеством точек изолинии А, ограничивающей опасную зону движения встречного судна, при построении площадей, занимаемых своим и встречным судном при одновременном маневрировании, с построением опасных зон определяют меру близости между опасными зонами в соответствии с выражением: Н(А,В)=min{r>0:А⊂B+R и B⊂A+R}, где А и В - линии, ограничивающие опасные зоны своего и встречного судна соответственно, r - радиус опасной зоны.
Использование дополнительной информации от приемоиндикатора спутниковой навигационной системы с видеоплоттером позволяет графически отображать траекторию движения своего судна. В набор навигационных данных, отображаемых на экране, входят местоположение судна в значениях широты и долготы, скорость и курс судна. Контроль изменения расстояния между судами по изменению текущих координат, которые являются центром радиусов безопасных зон движения судов, равных ширине полосы безопасного движения судов, определяемой с учетом длины и ширины судна, угла сноса судна ветровым течением, угла дрейфа судна, времени и угла рыскания судна, скорости судна, и определение расстояния между безопасными зонами движения судов посредством построения метрики Хаусдорфа при представлении судоводителю обобщенной информации для контроля и управления судна исключает ручные операции и позволяет эффективно решать задачи, связанные с увеличением безопасности мореплавания.
Способ иллюстрируется чертежами.
Фиг.1. Блок-схема аппаратуры для осуществления способа включает судовую РЛС 1, преобразователь 2, курсоуказатель 3, лаг 4, приемоиндикатор 5 спутниковой навигационной системы с видеоплоттером, процессор 6, графопостроитель 7, дисплей 8.
Фиг.2. График построения опасных областей. Аi - линия, ограничивающая опасную зону встречного судна, В - линия, ограничивающая опасную зону собственного судна, dн(В,А) и dн (А,В) - комбинации расстояний между опасными зонами, Н(А,В) - мера близости между опасными зонами.
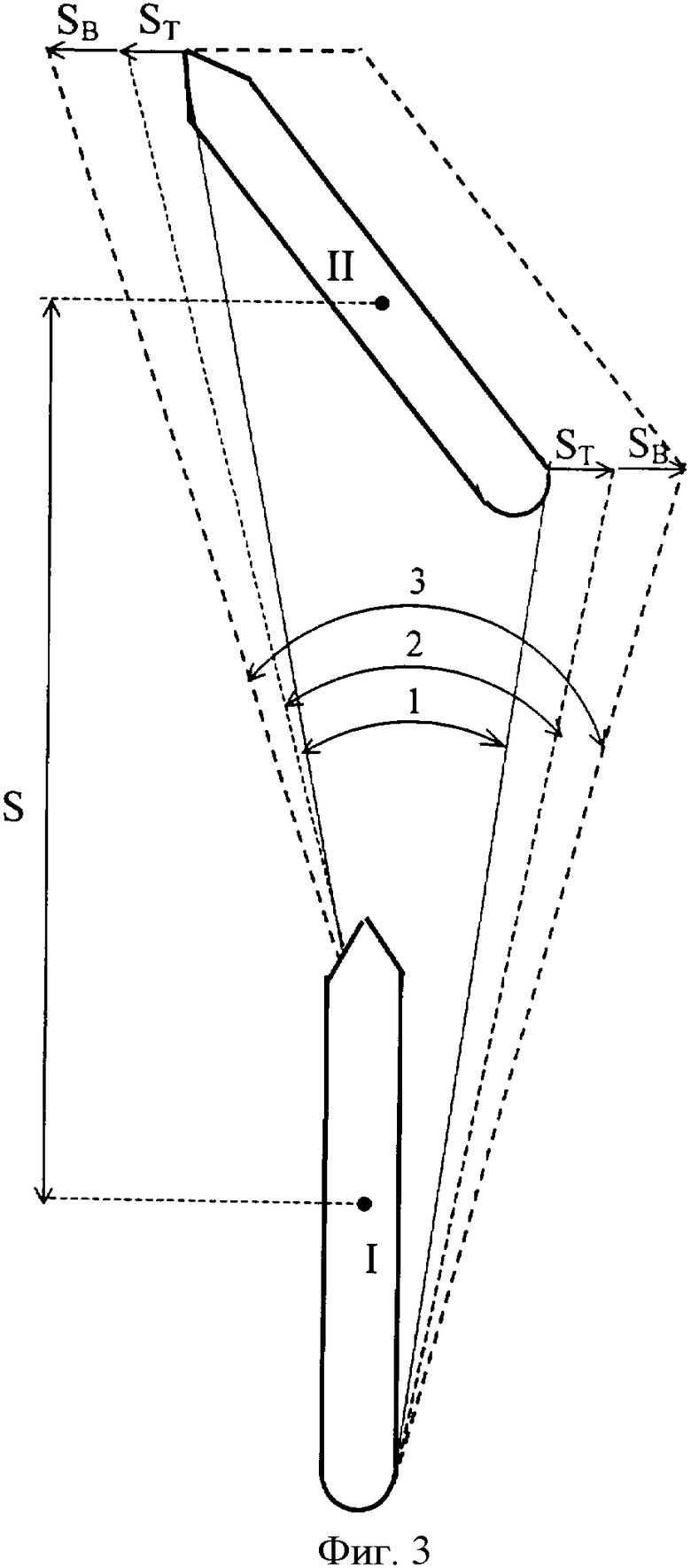
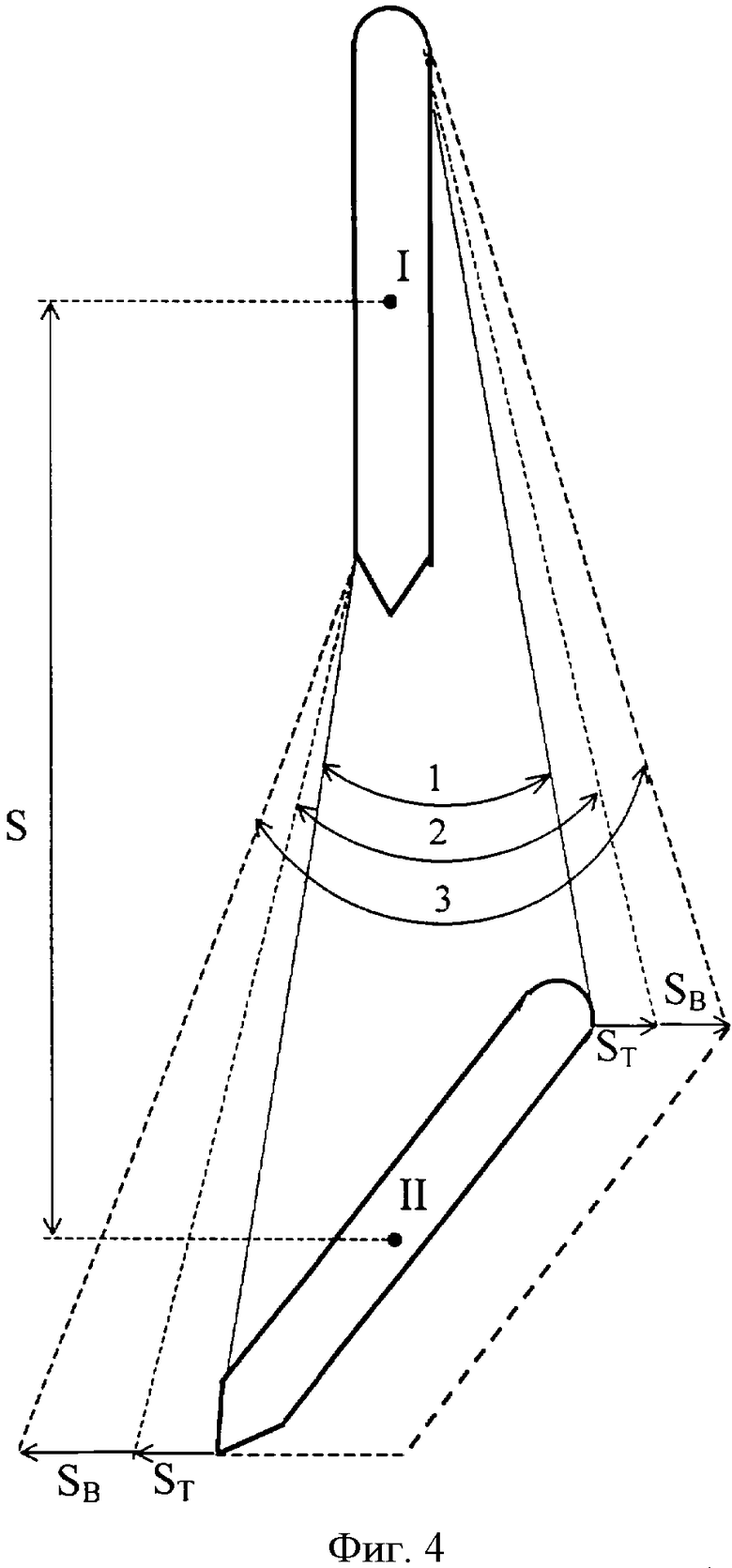
Фиг.3, 4. Построение площадей, занимаемых судном при повороте вправо и влево. S - величина перемещения центра вращения судна при повороте, Sт - вектор сноса судна течением за время циркуляции, Sв - вектор сноса судна ветром.
Способ осуществляется следующим образом. Информацию от судовой РЛС 1 о дистанции и пеленге преобразуют посредством преобразователя 2 в цифровую форму и вводят в процессор 6, в который также вводят данные о курсе с курсоуказателя 3, скорости с лага 4, текущих координатах с приемоиндикатора 5. Кроме того, в процессор 6 вводятся габаритные характеристики (длина и ширина) судов, находящихся в зоне радиолокационной дальности видимости, запрашиваемые по каналам связи. В процессоре 6 по полученным данным рассчитывается соотношение скоростей собственного и судов, находящихся в зоне радиолокационной дальности видимости, соотношение текущих дистанций, элементы движения целей и разности курсов. На видеоплоттере приемоиндикатора 5 отображаются траектории движения судов. По изменению текущих координат, скорости и курса судов, находящихся в зоне радиолокационной дальности видимости в процессоре 6 рассчитываются углы сноса судов ветровым течением α1, углы дрейфа α2, время t и углы рыскания β, скорости V, и с учетом длины Lc и ширины Вc судов рассчитывают ширину полос безопасного движения для каждого судна, в том числе и своего по формуле:
Вм=Lc·sin(α1+α2)Bc·cos(α1+α2)+tsinβ·V.
На основании данных о маневренных характеристиках судов, запрашиваемых по каналам связи, на графопостроителе 7 строят площади, занимаемые судами при маневрировании (повороте). При этом определяют траекторию движения центра тяжести, носовой и кормовой оконечностей, рассчитывают вектор сноса судна течением за время циркуляции tц:Sт=Vт·tц, где VT - скорость течения, рассчитывают углы дрейфа для самых неблагоприятных условий, определяют вектор сноса судна ветром Sв. Образовавшаяся при этом фигура (фиг.3, 4) характеризует площадь, которую может занимать судно при повороте вправо (фиг.3) и влево (фиг.4). С графопостроителя 7 и видеоплоттера приемоиндикатора 5 информация поступает на дисплей 8, на который поступает также информация от РЛС 1.
Далее посредством электронного маркера строят безопасные зоны движения судов. При этом текущие координаты судов являются центрами радиусов, длина которых соответствует длине занимаемой площади при маневрировании судна влево и вправо. Расстояние от своего судна до опасной зоны определяют путем построения метрики Хаусдорфа (фиг.2) посредством графопостроителя 7 в соответствии с выражением:
R=min{||х-у||:у∈А},
где R - расстояние между собственным судном и множеством точек изолинии А, ограничивающей опасную зону движения встречного судна (фиг.2а). При построении площадей, занимаемых своим и встречным судном при одновременном маневрировании, с построением опасных зон определяют меру близости между опасными зонами в соответствии с выражением:
Н(А,В)=min{r>0:А⊂В+R и В⊂А+R},
где А и В - линии, ограничивающие опасные зоны своего и встречного судна соответственно, r - радиус опасной зоны (фиг.2в).
Ввиду того что радиус опасной зоны для каждого судна r=const, то по мере изменения координат центр радиуса и линия, ограничивающая опасную зону, будут перемещаться на дисплее 8 пропорционально относительно друг друга. При этом судоводитель будет наблюдать перемещение опасной зоны встречного судна относительно опасной зоны своего судна и у него будет достаточно времени для принятия правильного решения по обеспечению безопасного плавания в отличие от известного способа [1], при реализации которого он должен путем визуального топологического анализа проигрывать множество вариантов для определения возможного вида и формы области чрезмерного сближения с каждым из встречных судов. В предлагаемом способе области чрезмерного сближения анализируются автоматически путем определения меры близости между опасными зонами, которая легко поддается численной оценке посредством построения метрики Хаусдорфа. Критерием опасности чрезмерного сближения является соприкосновение на дисплее 8 линий, ограничивающих опасные зоны. При этом может подаваться звуковой сигнал. Реализация способа основана на использовании штатных РЛС кругового обзора, лага, курсоуказателя, приемоиндикатора типа GP - 1500 спутниковой навигационной системы GPS, снабженного встроенным плоттером типа LP - 1000 или GD - 1000, на передней панели которых имеется гнездо для вставки дискет типа RAM или ROM, на которых можно хранить электронные карты маршрута плавания, отображающие береговую черту и навигационные опасности (буи, банки, рифы, глубины и т.д.). При этом электронные карты могут быть совмещены с радиолокационной информацией, включая опасные зоны. Опасные зоны отображаются в разных цветах в зависимости от меры близости опасной зоны к собственному судну.
Источники информации
1. Патент RU №2077450.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2005 |
|
RU2281529C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272739C1 |
| Способ информационного обеспечения судоводителя о надводной обстановке | 2023 |
|
RU2833310C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2077450C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2005 |
|
RU2279039C1 |

Изобретение относится к судовождению и может быть использовано в картографии, геодезии и при проведении работ, связанных с построением карт при исследованиях различных геофизических процессов. Техническим результатом является повышение достоверности отображаемой графической информации, что позволяет эффективно решать задачи, связанные с увеличением безопасности мореплавания. Результат достигается тем, что представляемая судоводителю обобщенная информация для контроля и управления движением судна формируется и отображается на дисплее с электронным маркером в явном виде путем обработки информации, вырабатываемой судовыми РЛС кругового обзора на основе определения курса, скорости и пеленга встречных судов, маневренных характеристик как своего, так и встречных судов, определяемых с учетом множества судовых и геофизических параметров на текущий момент времени. 4 ил.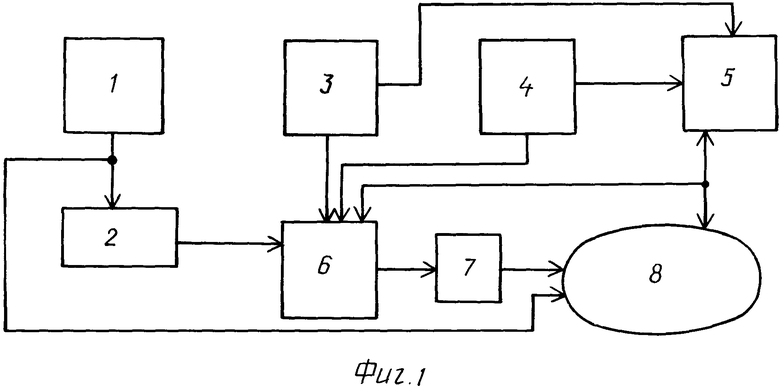
Способ представления судоводителю обобщенной информации для контроля и управления движением судна, заключающийся в том, что определяют курсы, скорости и пеленги встречных судов и дистанцию для каждого из встречных судов, при этом вычисляют реальные области чрезмерного сближения судов для индикации их на дисплее судоводителя, в котором для собственного и каждого из встречных судов определяют отношения скоростей, заданных безопасных и текущих дистанций до встречных целей, разность курсов и элементы движения судов, по которым определяют путем анализа возможный вид и форму области чрезмерного сближения с каждым из встречных судов, а реальный вид и форму соответствующей области сближения определяют путем формирования информационных массивов координат точек границ области, инициируя ее на дисплее соответствующим цветом в виде геометрической фигуры, ограниченной непрерывными линиями, причем число информационных массивов выбирают соответствующим возможному числу упомянутых линий, при этом инициируют информацию о курсе и скорости встречного судна как вектор абсолютной скорости и формуляр цели, обеспечивая совпадение цвета и соответствующего номера цели, дистанцию сближения и запас времени для принятия решения определяют с помощью сформированных электронного визира (маркера) и подвижного круга дальности, а курс расхождения инициируют на дисплее в явном виде путем обработки информации, вырабатываемой судовыми РЛС кругового обзора, лагом и курсоуказателем, отличающийся тем, что определяют маневренные характеристики судов путем построения площадей, занимаемых судами при маневрировании, при этом определяют траекторию движения центра тяжести, носовой и кормовой оконечностей, рассчитывают вектор сноса судна течением за время циркуляции tц:ST=VT·tц, где VT - скорость течения, рассчитывают углы дрейфа для самых неблагоприятных условий, определяют вектор сноса судна ветром SB для каждого судна, посредством электронного маркера строят безопасные зоны движения судов, при этом текущие координаты судов являются центрами окружностей с радиусами безопасных зон движения судов, длина которых соответствует длине занимаемой площади при маневрировании судна влево и вправо, расстояние от своего судна до опасной зоны определяют путем построения метрики Хаусдорфа посредством графопостроителя в соответствии с выражением:
R=min{||х-у||:у∈А}, где R - расстояние между собственным судном и множеством точек изолинии А, ограничивающую опасную зону движения встречного судна, при построении площадей, занимаемых своим и встречным судном при одновременном маневрировании с построением опасных зон определяют меру близости между опасными зонами в соответствии с выражением: Н(А,В)=min {r>0:А⊂В+R и В⊂А+R}, где А и В - линии, ограничивающие опасные зоны своего и встречного судна, соответственно, r - радиус опасной зоны.
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2077450C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2005 |
|
RU2281529C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| JP 2000182199 А, 30.06.2000 | |||
| 0 |
|
SU154018A1 | |
| СПОСОБ КОНТРОЛЯ ДИАМЕТРА ОТВЕРСТИЯ ПРИ ШЛИФОВАНИИ | 2022 |
|
RU2802691C1 |

