Предлагаемые способ и комплексная навигационная система относятся к области авиационного приборостроения и могут быть использованы при разработке навигационного оборудования летательных аппаратов (ЛА).
В навигационных системах ЛА широко используется курсовоздушный метод счисления пути (Селезнев В.П. Навигационные устройства, М.: Машиностроение, 1974 г., гл.X).
Для обеспечения большей точности определения координат местоположения в режиме курсовоздушного счисления пути и при решении многих функциональных задач на борту ЛА необходимо иметь информацию о скорости и направлении ветра.
Теоретические и практические аспекты функционирования бортового оборудования, обеспечивающего определение и использование скорости ветра на борту ЛА, приведены в следующих работах:
1. Воробьев Л.М. Воздушная навигация, М.: Машиностроение, 1984.
2. Кирст М.А. Навигационная кибернетика полета. М.: Воениздат, 1971.
3. Помыкаев И.И., Селезнев В.П., Дмитроченко Л.А. Навигационные приборы и системы. М.: Машиностроение, 1983.
4. Ривкин С.С., Ивановский Р.И., Костров А.В. Статистическая оптимизация навигационных систем. Л.: Судостроение, 1976.
5. Рогожин В.О., Синеглазов В.М., Фiяшкiн М.К. Пiлотажно-навiгацiйнi комплекси повiтряних суден. К.: Книжкове видавництво НАУ, 2005 (на украинском языке).
6. Селезнев В.П. Навигационные устройства. М.: Машиностроение, 1974.
7. Справочник пилота и штурмана гражданской навигации. Под редакцией Васина И.Ф. М.: Транспорт, 1988.
Скорость и направление ветра обычно задаются с помощью задатчика по командам с земли либо определяются на борту ЛА каким-либо косвенным способом (см. [6], гл.X; [2], гл.VII; [5], гл.7; [7], гл.9). Измерение скорости и направления ветра непосредственно на борту ЛА более предпочтительно, т.к. позволяет постоянно уточнять их значения в районе нахождения ЛА.
В книге [6] на стр.276 описан способ измерения скорости ветра на борту ЛА, при котором скорость и направление ветра в полете получаются в результате сравнения координат ЛА XB, YB, полученных счислением пути относительно воздуха и координат фактического места ЛА, измеренных любым из известных методов ориентировки (визуальным, астрономическим, радиотехническим и др.) X, Y.
Составляющие скорости ветра в земной системе координат равны:
 ,
,
 ,
,
где t - время счисления пути.
Конкретным примером реализации этого способа в авиационной аппаратуре может служить комбинированная навигационная система, описанная в книге [2] на стр.131-135. В этой системе в качестве интегральных ошибок системы с помощью данных радиоизмерений определяются погрешности датчика воздушной скорости и датчика курса, включающие составляющие вектора скорости ветра:
что принципиально не мешает рассматривать эту систему как определяющую составляющие скорости ветра в земной географической системе координат
В книге [6] на стр.546-556, на примере курсовоздушно-доплеровской навигационной системы, описан способ измерения скорости ветра, при котором скорость и направление ветра в полете определяют в результате сравнения скорости ЛА относительно воздуха VB, измеренной аэрометрическим методом, с путевой скоростью ЛА W, измеренной радиотехническим доплеровским методом. В принципе, для определения скорости ветра может быть использован любой метод измерения путевой скорости W, например инерциальный или широко применяемый в настоящее время радиотехнический спутниковый.
Полагаем, что в обоих случаях описан один и тот же способ определения скорости ветра, основанный на измерении параметров движения ЛА относительно воздуха и сравнении их с аналогичными параметрами движения ЛА относительно поверхности земли.
Этот способ, как наиболее близкий к предлагаемому, выбран в качестве прототипа.
При этом, учитывая, что измерителям путевой скорости и фактического места ЛА, например радиотехническим системам (ДИСС - доплеровский измеритель скорости и сноса, СНС - спутниковая навигационная система, РСБН - радиотехническая система ближней навигации, РСДН - радиотехническая система дальней навигации) присущи случайные погрешности, имеющие высокочастотный характер, полагаем, что способ предполагает статистическую фильтрацию этих погрешностей.
Как уже говорилось выше, систему, описанную в книге [2] на стр.131-135, можно рассматривать как определяющую составляющие скорости ветра в земной географической системе координат:
где XE, YN - измеренные координаты фактического местоположения ЛА в географической системе координат, а координаты ХЕВ, YNB получают счислением горизонтальных составляющих вектора воздушной скорости VEB, VNB в географической системе координат относительно координат начального местоположения ЛА ХЕ0, YN0:
VEB=VXГsinΨ+VZГcosΨ+UE,
VNB=VXГcosΨ+VZГsinΨ+UN,
VXГ, VZГ - составляющие вектора воздушной скорости в горизонтальной самолетной системе координат:
VXГ=VИ(cosϑ+αАТsinϑcosγ+βCKsinϑsinγ),
VZГ=VИ(βCKcosγ-αATsinγ),
VИ - продольная составляющая вектора воздушной скорости, измеряемая датчиком воздушной скорости, αАТ, βCK - углы атаки и скольжения, измеряемые датчиками угла атаки и угла скольжения, Ψ, γ, υ - курс, крен, тангаж, измеряемые инерциальной курсовертикалью.
Конкретным примером реализации способа-прототипа в авиационной аппаратуре, с использованием данных о путевой скорости ЛА, может служить вышеупомянутая курсо-воздушно-доплеровская навигационная система, описанная в книге [6], на стр.546-556.
В системе, описанной в книге в книге [6], на стр.546-556, составляющие скорости ветра в географической системе координат определяются путем интегрирования результатов сравнения составляющих векторов путевой WE, WN и воздушной скорости VEB, VNB:
Измеренные по способу-прототипу составляющие скорости будут определены с большими погрешностями, т.к. они включают в себя составляющую, обусловленную погрешностью датчика воздушной скорости.
UE*=UE+ΔUEV,
UN=UN+ΔUNV,
где ΔUEV, ΔUNV - ошибки в определении по соответствующим осям составляющих скорости ветра, обусловленные погрешностью датчика воздушной скорости, UX, UY - действительные составляющие вектора скорости ветра.
Постоянные коэффициенты K1 и К2 обычно подбираются из условия минимума среднеквадратической ошибки по координатам и скорости.
Так как ошибки измерителей вектора воздушной скорости связаны с самолетной системой координат, а ветер с земной системой координат, то навигационные системы, использующие способ-прототип для измерения ветра, наиболее эффективно работают при полетах с неизменным курсом, когда положение самолетной системы координат относительно земной не меняется.
Если же ЛА совершает маневр по курсу, то входящие, в предварительно измеренный по способу-прототипу вектор скорости ветра, ошибки его измерения, обусловленные погрешностью датчика воздушной скорости, вносят дополнительные погрешности в счисляемые координаты, т.к. они разворачиваются вместе с самолетной системой координат, но продолжают учитываться в составляющих вектора скорости ветра, определенных при другом взаимоположении земной и самолетной систем координат.
Поскольку информация о скорости ветра используется при решении многих задач на борту ЛА, то точность данных о скорости ветра имеет существенное самостоятельное значение.
Целью предлагаемого изобретения является повышение точности измерения скорости ветра и расширение функциональных возможностей способа путем раздельного определения составляющих вектора скорости ветра и погрешности датчика воздушной скорости на участках маневра по курсу, при котором взаимное расположение осей земной системы координат и самолетной системы координат, в которой работает датчик воздушной скорости, меняются.
Указанная цель достигается тем, что в способе измерения скорости ветра на борту ЛА, основанном на измерении угловой ориентации и скорости относительно воздуха, счисления пути пройденного относительно воздуха, измерения путевой скорости и/или координат местоположения любым из известных методов, например инерциальным, радиотехническим или визуальным, сравнения путевой скорости с скоростью относительно воздуха и/или сравнения текущих координат с координатами, полученными счислением, и интегрирования полученных разностных сигналов по скорости и/или координатам, дополнительно результат сравнения скоростей и/или координат перед интегрированием изменяют в функции текущего значения курса, а само определение скорости ветра осуществляют непосредственно в процессе маневрирования по курсу.
Составляющие вектора скорости ветра UE, UN, погрешность датчика воздушной скорости ΔV определяются следующим образом:
где ΔX и ΔY - разностные сигналы по координатам или скорости.
При использовании разностных сигналов по координатам:
ΔХ=ХEB-XE, ΔY=YNB-YN,
где ХЕ и YN координаты фактического местоположения ЛА, измеренные любым из известных способов, а ХЕВ и YNB получают интегрированием составляющих вектора воздушной скорости в земной системе координат:
VEB=VXГsinΨ+VZГcosΨ+UE,
VNB=VXГcosΨ+VZГsinΨ+UN,
VXГ, VZГ - составляющие вектора воздушной скорости в горизонтальной самолетной системе координат:
VXГ=(VИ-ΔV)(cosϑ+αАТsinϑcosγ+βCKsinϑsinγ),
VZГ=(VИ-ΔV)(βCKcosγ-αATsinγ),
VИ - продольная составляющая вектора воздушной скорости, измеряемая датчиком воздушной скорости, αАТ, βСК - углы атаки и скольжения, измеряемые датчиками угла атаки и угла скольжения, Ψ, γ, υ - параметры угловой ориентации ЛА: курс, крен, тангаж, измеряемые инерциальной курсовертикалью.
При использовании разностных сигналов по скорости:
ΔХ=VEB-WE, ΔY=VNB-WN,
где WE и WN составляющие вектора путевой скорости, измеренные любым из известных способов.
Поскольку, как указывалось выше, в измеренных координатах фактического местоположения и путевой скорости ЛА присутствуют случайные ошибки, а курс, крен, тангаж, скорость, угол атаки и угол скольжения изменяются вследствие произвольных маневров ЛА, то для определения закона регулирования коэффициентов усиления Kij целесообразно использовать один из известных методов статистического оптимального оценивания систем с переменными параметрами, например метод оптимальной фильтрации Калмана [4], который в настоящее время широко применяется для оценивания случайных параметров, в том числе погрешностей систем, в различных областях техники.
При этом коэффициенты усиления Kij будут являться элементами изменяющейся во времени матрицы усиления K(t), определяемой матричными уравнениями:
K(t)=P(t)H(t)R-1(t),

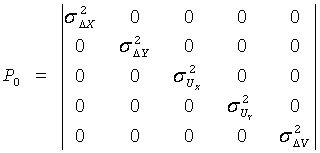
P(t0)=P0.
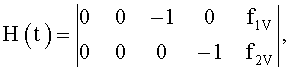
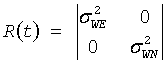
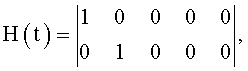
При использовании разностных сигналов по координатам матрицы H(t) и R(t) имеют вид:

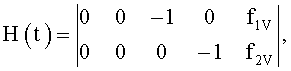
При использовании разностных сигналов по скорости матрицы H(t) и R(t) имеют вид:
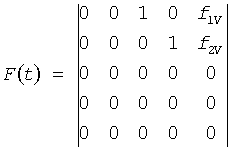
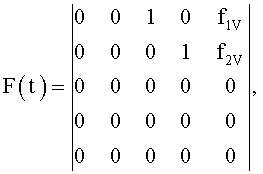
Матрица F(t) и начальное значение матрицы P(t) для обоих вариантов разностных сигналов имеют вид:
 ,
, 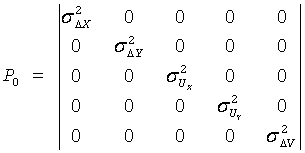 ,
,
где  ,
,  ,
,  ,
,  ,
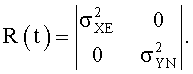
,  - дисперсии случайных погрешностей системы по координатам, составляющим скорости ветра, воздушной скорости
- дисперсии случайных погрешностей системы по координатам, составляющим скорости ветра, воздушной скорости 
 - дисперсии случайных погрешностей измерителя координат фактического местоположения ЛА,
- дисперсии случайных погрешностей измерителя координат фактического местоположения ЛА, 
 - дисперсии случайных погрешностей измерителя путевой скорости ЛА, а коэффициенты матрицы F(t) равны:
- дисперсии случайных погрешностей измерителя путевой скорости ЛА, а коэффициенты матрицы F(t) равны:
f1V=sinΨ,
f2V=cosΨ.
Зависимость коэффициентов усиления Kij от текущих значений курса ЛА позволяет на участках маневра по курсу по отдельности определить составляющие скорости ветра и погрешность датчика воздушной скорости.
Предлагаемый способ измерения скорости ветра на борту ЛА выгодно отличается от способа-прототипа тем, что измерение скорости ветра производится оптимальным образом при маневрах ЛА по курсу с одновременным автоматическим определением погрешности датчика воздушной скорости, что позволяет повысить точность определения составляющих скорости ветра.
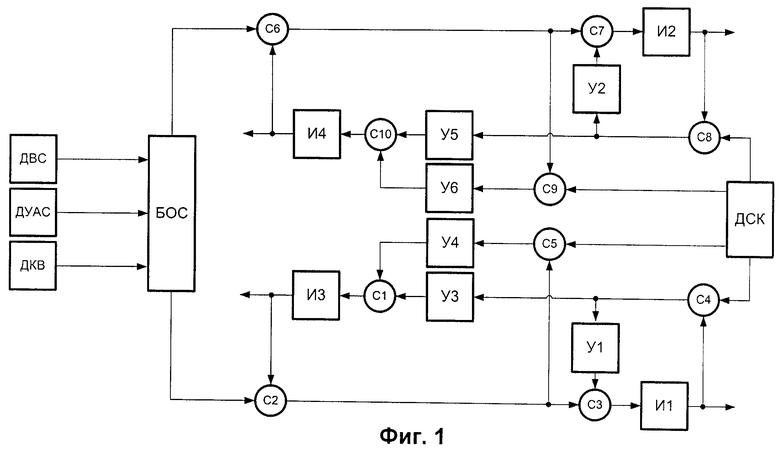
Реализация способа-прототипа в виде устройства, с учетом только существенных для предлагаемого изобретения признаков, может быть представлена в виде функциональной блок-схемы, изображенной на фиг.1.
Устройство-прототип включает в себя:
- датчик воздушной скорости (ДВС) - 1;
- датчик углов атаки и скольжения (ДУАС) - 2;
- датчик курса и вертикали (ДКВ) - 3;
- датчик путевой скорости и координат местоположения (ДСК) - 4;
- блок определения составляющих вектора относительной скорости (БОС) - 5;
- четыре интегратора (И1, И2, И3, И4) - соответственно 6, 7, 8, 9;
- шесть усилителей (У1, У2, У3, У4, У5, У6) - соответственно 10, 11, 12, 13, 14, 15;
- десять сумматоров C1, C2, C3, C4, C5, C6, C7, C8, C9, C10 - соответственно 16, 17, 18, 19, 20, 21, 22, 23, 24, 25.
Недостатки устройства-прототипа аналогичны недостаткам способа-прототипа, приведенным выше.
Цель изобретения в виде комплексной навигационной системы (КНС) аналогична цели изобретения в виде способа, приведенной выше.
Поставленная цель для КНС, реализующей способ определения скорости ветра на борту ЛА, достигается тем, что в КНС, включающую датчик воздушной скорости, сумматор, датчик путевой скорости и координат местоположения, соединенный четырьмя выходами соответственно с входами четвертого, восьмого, пятого и девятого сумматоров, датчики углов атаки и скольжения, курса и вертикали, выходами соединенные с входами блока определения составляющих вектора относительной скорости, два выхода которого соответственно через последовательно соединенные второй сумматор, третий сумматор, первый интегратор и последовательно соединенные шестой сумматор, седьмой сумматор, второй интегратор поданы на вторые входы четвертого и восьмого сумматоров, причем вторые входы второго, шестого, пятого и девятого сумматоров соединены соответственно с выходами третьего интегратора, четвертого интегратора, второго и шестого сумматоров, введен блок формирования корректирующих сигналов, пятью входами подключенный соответственно к выходам датчика курса и вертикали, четвертого, пятого, восьмого и девятого сумматоров, а пятью выходами соединенный с входами третьего сумматора, седьмого сумматора, третьего интегратора, четвертого интегратора и вновь введенного пятого интегратора, выход которого подан на вход первого сумматора, второй вход которого соединен с выходом датчика воздушной скорости, а выход подан на третий вход блока определения составляющих вектора относительной скорости
Предлагаемая КНС представлена на фиг.2 в виде функциональной блок-схемы и включает в себя:
- датчик воздушной скорости - ДВС;
- датчик углов атаки и скольжения - ДУАС;
- датчик курса и вертикали - ДКВ;
- датчик путевой скорости и координат местоположения - ДСК;
- блок определения составляющих вектора относительной скорости - БОС;
- пять интеграторов - И1, И2, И3, И4, И5;
- девять сумматоров - C1, С2, С3, С4, С5, С6, С7, С8, С9;
- блок формирования корректирующих сигналов - БКС.
Предлагаемая КНС работает следующим образом.
ДВС измеряет продольную составляющую вектора скорости ЛА относительно воздуха - истинную воздушную скорость VИ. В настоящее время для измерения истинной воздушной скорости наибольшее распространение нашли системы, основанные на аэрометрическом методе.
ДУАС измеряет углы ориентации ЛА относительно вектора воздушной скорости: угол атаки αАТ и угол скольжения βСК. В настоящее время для измерения углов атаки и скольжения наибольшее распространение нашли системы, основанные на аэрометрическом методе.
ДВС и ДУАС совместно реализуют функцию измерения вектора воздушной скорости ЛА.
ДСК измеряет скорость ЛА относительно земной поверхности - путевую скорость W и координаты фактического местоположения ХЕ и YN. В настоящее время для измерения составляющих вектора путевой скорости и координат фактического местоположения наибольшее распространение нашли инерциальные, радиотехнические и обзорно-сравнительные (визуальные, по полям рельефа) методы. В частности, для одновременного измерения путевой скорости и координат местоположения, на борту современных ЛА очень широко применяются спутниковые навигационные системы (СНС).
ДКВ измеряет параметры угловой ориентации ЛА относительно земной поверхности - курс Ψ, крен γ и тангаж υ. В настоящее время для измерения углов ориентации ЛА наиболее распространены системы, основанные на инерциальном методе. В качестве такого датчика может быть использована инерциальная навигационная система, инерциальная курсовертикаль, совокупность специализированных датчиков курса и вертикали.
В сумматоре C1 осуществляется учет погрешности ДВС ΔV, оценка которой произведена на интеграторе И5:
V=VИ-ΔV.
В БОС определяются составляющие вектора воздушной скорости ЛА в земной системе координат:
VE=V[cosϑ+αATsinϑcosγ+βCKsinϑsinγ)sinΨ+(βCKcosγ-αATsinγ)cosΨ],
VN=V[cosϑ+αATsinϑcosγ+βCKsinϑsinγ)cosΨ+(βCKcosγ-αATsinγ)sinΨ].
В сумматорах C2 и C6 осуществляется учет составляющих скорости ветра UE, UN, оценка которых произведена на интеграторах И3 и И4:
VEB=VE+UE,
VNB=VN+UN.
Счислении координат ХЕВ и YNB осуществляют интегрированием составляющих вектора воздушной скорости и корректирующих сигналов δК1, δК2 из БКС на интеграторах И1 и И2:
где ХЕ0 и YN0 - начальные значения координат ХЕ и YN.
Составляющие вектора скорости ветра UE, UN и погрешность датчика воздушной скорости ΔV определяют на интеграторах И3, И4 и И5 на основе корректирующих сигналов δK3, δК4, δК5 из БКС следующим образом:

Корректирующие сигналы δK1, δK2, δK3, δK4, δK5 в БКС формируются следующим образом:
δK1=K11ΔX+K12ΔY,
δK2=К21ΔХ+K22ΔY,
δK3=K31ΔX+K32ΔY,
δK4=K41ΔX+K42ΔY,
δK5=K51ΔX+K52ΔY,
где ΔX и ΔY - разностные сигналы по координатам или скорости.
При использовании разностных сигналов по координатам сигналы ΔX и ΔY формируются на сумматорах C3 и C4:
ΔХ=ХЕВ-XE,
ΔY=YNB-YN,
где ХЕ и YN координаты фактического местоположения ЛА, измеренные ДСК.
При использовании разностных сигналов по скорости сигналы ΔХ и ΔY формируются на сумматорах C5 и C9:
ΔХ=VEB-WE,
ΔY=VNB-WN,
где WE и WN составляющие вектора путевой скорости, измеренные ДСК.
Коэффициенты усиления Kij формируются в БКС и являются элементами изменяющейся во времени матрицы усиления K(t), определяемой матричными уравнениями:
K(t)=P(t)H(t)R-1(t),

P(t0)=P0.
При использовании разностных сигналов по координатам матрицы H(t) и R(t) имеют вид:
При использовании разностных сигналов по скорости матрицы H(t) и R(t) имеют вид:

Матрица F(t) и начальное значение матрицы P(t) для обоих вариантов разностных сигналов имеют вид:
где , , , , - дисперсии случайных погрешностей системы по координатам, составляющим скорости ветра, воздушной скорости  - дисперсии случайных погрешностей измерителя координат фактического местоположения ЛА,
- дисперсии случайных погрешностей измерителя координат фактического местоположения ЛА,  - дисперсии случайных погрешностей измерителя путевой скорости ЛА, а коэффициенты матрицы F(t) равны:
- дисперсии случайных погрешностей измерителя путевой скорости ЛА, а коэффициенты матрицы F(t) равны:
f1V=sinΨ,
f2V=cosΨ.
Формирование в БКС коэффициентов усиления Kij в зависимости от текущих значений курса ЛА позволяет на участках маневра по курсу по отдельности оценить на интеграторах И3 и И4 составляющие скорости ветра UE, UN, а на интеграторе И5 - погрешность датчика воздушной скорости ΔV.
Предлагаемая КНС выгодно отличается от устройства-прототипа тем, что измерение скорости ветра производится оптимальным образом при маневрах ЛА по курсу с одновременным автоматическим определением погрешности датчика воздушной скорости, что позволяет повысить точность определения составляющих скорости ветра, определения вектора воздушной скорости и счисления координат местоположения ЛА.
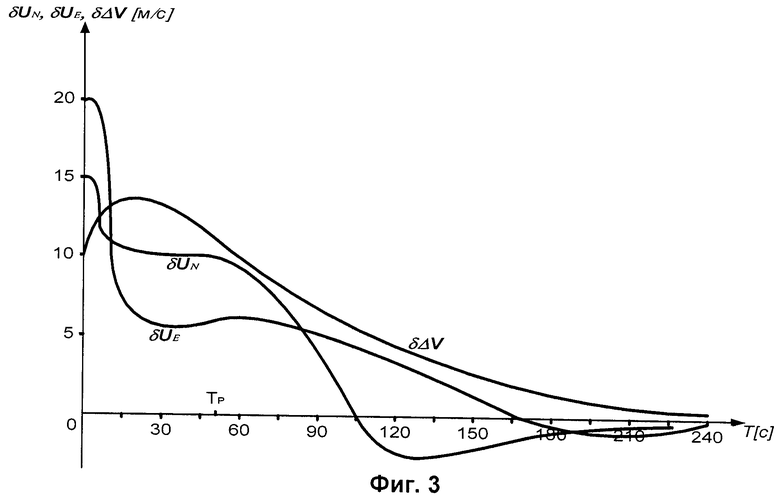
На фиг.3 представлены результаты моделирования работы предлагаемых способа и КНС-графики переходных процессов оценивания составляющих вектора скорости ветра UE, UN и погрешности ДВС ΔV на участке разворота по курсу, полученные при моделировании на ЭВМ.
При этом предполагалось, что в качестве измерителя скорости и фактического местоположения используется спутниковая навигационная система и были сделаны следующие предположения:
- составляющие скорости ветра UX, UY являются случайными процессами с корреляционными функциями вида RUxUx=RUyUy=σ2e-β|τ|, где σ2 меняется в зависимости от высоты полета и времени года в пределах 10÷25 м/сек, а коэффициент затухания корреляционной функции ветра β=10-3÷10-4 сек-1;
- погрешность ДВС для определенной высоты и скорости полета является суммой постоянной величины ΔV0 и случайной функции времени типа "белого" шума ΔVC:
ΔV=ΔV0+ΔVC;
- ошибка измерения составляющих вектора путевой скорости W датчиком путевой скорости представляют собой флуктуационные помехи типа белого шума, интенсивность которого

где σVx=σVy=0.2÷0.3 м/сек.
Графики переходных процессов построены для моделируемого полета со скоростью V=250 м/с, с разворотом с угловой скоростью  через 50 сек после начала коррекции и значениями составляющих скорости ветра UE=20 м/сек, UN=15 м/сек и погрешности ДВС ΔV=10 м/сек.
через 50 сек после начала коррекции и значениями составляющих скорости ветра UE=20 м/сек, UN=15 м/сек и погрешности ДВС ΔV=10 м/сек.
Из приведенных графиков следует, что можно ожидать выделение составляющих скорости ветра и ошибки ДВС с заданными точностями U=ΔV=2 м/сек через 90-120 сек после начала разворота.
Использование предлагаемых способа и устройства в авиационной аппаратуре позволит увеличить точность решения навигационных и других задач и, следовательно, увеличить эффективность использования ЛА.
Реализация предлагаемого способа и устройств не подразумевает изменение или дополнение аппаратуры, устанавливаемой на борту ЛА, предполагает использование только известных устройств и систем из состава бортового оборудования ЛА и поэтому изобретение может быть реализовано на существующей технической базе практически на любых типах ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2486527C2 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА НАВИГАЦИИ | 2003 |
|
RU2229686C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2178145C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
Использование: в составе комплексов пилотажно-навигационного оборудования летательных аппаратов (ЛА). Способ определения скорости ветра на борту летательного аппарата (ЛА), основанный на измерении скорости ЛА относительно воздуха и счислении пути пройденного ЛА относительно воздуха, измерения путевой скорости и/или текущих координат ЛА любыми другими методами, сравнения путевой скорости с скоростью относительно воздуха и/или текущих координат ЛА с координатами, полученными счислением, и интегрировании полученных разностных сигналов по скорости и/или координатам, в котором результат сравнения скоростей и/или координат перед интегрированием изменяют в функции текущих значений курса и скорости ЛА, а само определение скорости ветра осуществляют непосредственно в процессе маневрирования ЛА по курсу. Устройство, реализующее способ определения скорости ветра, включающее взаимосвязанные датчики воздушной скорости, углов атаки и скольжения, курса и вертикали, путевой скорости и координат местоположения, блок определения составляющих вектора относительной скорости, четыре интегратора, девять сумматоров, в которое дополнительно введены блок формирования корректирующих сигналов и пятый интегратор. Техническим результатом является повышение точности определения скорости ветра на борту ЛА. 2 н.п. ф-лы, 3 ил.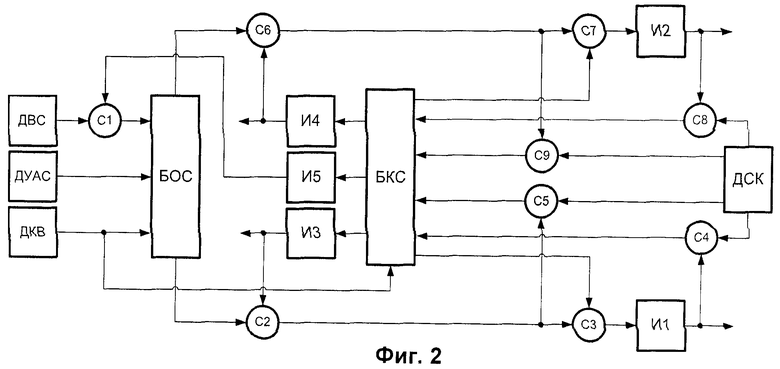
1. Способ определения скорости ветра на борту летательного аппарата, основанный на измерении угловой ориентации и скорости относительно воздуха, счислении пути, пройденного относительно воздуха, измерении путевой скорости и/или координат местоположения любым из известных методов, например инерциальным, радиотехническим или визуальным, сравнении путевой скорости со скоростью относительно воздуха и/или сравнении текущих координат с координатами, полученными счислением, и интегрировании полученных разностных сигналов по скорости и/или координатам, отличающийся тем, что результат сравнения скоростей и/или координат перед интегрированием изменяют в функции текущего значения курса, а само определение скорости ветра осуществляют непосредственно в процессе маневрирования по курсу.
2. Комплексная навигационная система для реализации способа определения скорости ветра на борту летательного аппарата по п.1, включающая датчик воздушной скорости, сумматор, датчик путевой скорости и координат местоположения, соединенный четырьмя выходами соответственно с входами четвертого, восьмого, пятого и девятого сумматоров, датчики углов атаки и скольжения, курса и вертикали, выходами соединенные с входами блока определения составляющих вектора относительной скорости, два выхода которого соответственно через последовательно соединенные второй сумматор, третий сумматор, первый интегратор и последовательно соединенные шестой сумматор, седьмой сумматор, второй интегратор поданы на вторые входы четвертого и восьмого сумматоров, причем вторые входы второго, шестого, пятого и девятого сумматоров соединены соответственно с выходами третьего интегратора, четвертого интегратора, второго и шестого сумматоров, отличающаяся тем, что введен блок формирования корректирующих сигналов, пятью входами подключенный соответственно к выходам датчика курса и вертикали, четвертого, пятого, восьмого и девятого сумматоров, а пятью выходами соединенный с входами третьего сумматора, седьмого сумматора, третьего интегратора, четвертого интегратора и вновь введенного пятого интегратора, выход которого подан на вход первого сумматора, второй вход которого соединен с выходом датчика воздушной скорости, а выход подан на третий вход блока определения составляющих вектора относительной скорости.
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2371733C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2192015C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ВИХРЕВОЙ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2324953C2 |
| Глушитель шума | 1981 |
|
SU992764A1 |
| US 20100305781 A1, 02.12.2010. | |||

