Предлагаемые способ и устройство относятся к области авиационного приборостроения и могут быть использованы при разработке навигационного оборудования летательных аппаратов (ЛА).
В навигационных системах ЛА широко используется курсо-воздушный метод счисления пути (Селезнев В.П. «Навигационные устройства», М., Машиностроение, 1974 г., гл.Х).
Для обеспечения большей точности определения координат местоположения в режиме курсо-воздушного счисления пути и при решении многих функциональных задач на борту ЛА необходимо иметь информацию о скорости и направлении ветра.
Теоретические и практические аспекты функционирования бортового оборудования, обеспечивающего определение и использование скорости ветра на борту ЛА, приведены в следующих работах:
1. Воробьев Л.М. Воздушная навигация, М.: Машиностроение, 1984.
2. Кирст М.А. "Навигационная кибернетика полета" Воениздат, М., 1971.
3. Помыкаев И.И., Селезнев В.П., Дмитроченко Л.А. "Навигационные приборы и системы", М.: Машиностроение, 1983.
4. Рогожин В.О., Синеглазов В.М., Фiляшкiн М.К. Пiлотажно-навiгацiйнi комплекси повiтряних суден, К.: Книжкове видавництво НАУ, 2005 (на украинском языке).
5. Селезнев В.П. "Навигационные устройства" Машиностроение, М., 1974.
6. Справочник пилота и штурмана гражданской навигации. Под редакцией Васина И.Ф., М.: Транспорт, 1988.
Скорость и направление ветра обычно задаются с помощью задатчика по командам с земли либо определяются на борту ЛА каким-либо косвенным способом (см. [5], гл. X; [2], гл. VII; [4], гл. 7; [6], гл. 9). Измерение скорости и направления ветра непосредственно на борту ЛА более предпочтительно, т.к. позволяет постоянно уточнять их значения в районе нахождения ЛА.
В книге [5] на стр.276 описан способ измерения скорости ветра на борту ЛА, при котором скорость и направление ветра в полете получаются в результате сравнения координат ЛА ХВ, YB, полученных счислением пути относительно воздуха и координат фактического места ЛА Х, Y, измеренных любым из известных методов ориентировки (визуальным, астрономическим, радиотехническим и др.).
Составляющие скорости ветра в земной системе координат равны:
где t - время счисления пути.
Конкретным примером реализации этого способа в авиационной аппаратуре может служить комбинированная навигационная система, описанная в книге [2] на стр.131-135. В этой системе в качестве интегральных ошибок системы с помощью данных радиоизмерений определяются погрешности датчика воздушной скорости и датчика курса, включающие составляющие вектора скорости ветра:
что принципиально не мешает рассматривать эту систему как определяющую составляющие скорости ветра в земной географической системе координат.
В книге [5] на стр.546-556, на примере курсо-воздушно-доплеровской навигационной системы, описан способ измерения скорости ветра, при котором скорость и направление ветра в полете определяют в результате сравнения скорости ЛА относительно воздуха VB, измеренной аэрометрическим методом, с путевой скорости ЛА W, измеренной радиотехническим доплеровским методом. В принципе, для определения скорости ветра может быть использован любой метод измерения путевой скорости W, например инерциальный или широко применяемый в настоящее время радиотехнический спутниковый.
Полагаем, что в обоих случаях описан один и тот же способ определения скорости ветра, основанный на измерении параметров движения ЛА относительно воздуха и сравнении их с аналогичными параметрами движения ЛА относительно поверхности земли.
Этот способ, как наиболее близкий к предлагаемому, выбран в качестве прототипа.
При этом, учитывая, что измерителям путевой скорости и фактического места ЛА, например радиотехническим системам (ДИСС - доплеровский измеритель скорости и сноса, СНС - спутниковая навигационная система, РСБН - радиотехническая система ближней навигации, РСДН - радиотехническая система дальней навигации) присуши случайные погрешности, имеющие высокочастотный характер, полагаем, что способ предполагает фильтрацию этих погрешностей.
Как уже говорилось выше, систему, описанную в книге [2] на стр.131-135, можно рассматривать как определяющую составляющие скорости ветра в земной географической системе координат:
где ХЕ, YN - измеренные координаты фактического местоположения ЛА в географической системе координат, а координаты ХЕВ, YNB получают счислением горизонтальных составляющих вектора воздушной скорости VEB, VNB в географической системе координат относительно координат начального местоположения ЛА ХЕ0, YNO:


VXГ, VZГ - составляющие вектора воздушной скорости в горизонтальной самолетной системе координат:
VXГ=VИ(cos

VZГ=γИ(βСКcosγ-αATsinγ),
VИ - продольная составляющая вектора воздушной скорости, измеряемая датчиком воздушной скорости, αАТ, βСК - углы атаки и скольжения, измеряемые датчиками угла атаки и угла скольжения, Ψ, γ, υ - курс, крен, тангаж, измеряемые датчиком курса и вертикали.
Конкретным примером реализации способа-прототипа в авиационной аппаратуре, с использованием данных о путевой скорости ЛА, может служить вышеупомянутая курсо-воздушно-доплеровская навигационная система, описанная в книге [5], на стр.546-556.
В системе, описанной в книге [5], составляющие скорости ветра в географической системе координат определяются путем интегрирования результатов сравнения составляющих векторов путевой WE, WN и воздушной скорости VEВ, VNB:
Постоянные коэффициенты K1 и К2, обычно подбираются из условия минимума среднеквадратической ошибки по координатам и скорости.
Измеренные по способу-прототипу составляющие скорости будут определены с погрешностью, т.к. они включают в себя составляющие, обусловленные погрешностью датчика воздушной скорости:
UE*=UE+ΔUEV,
UN*=UN+ΔUNV,
где ΔUEV, ΔUNV - ошибки в определении по соответствующим осям составляющих скорости ветра, обусловленные погрешностями датчика воздушной скорости, UX, UY - действительные составляющие вектора скорости ветра, UX*, UY* - измеренные составляющие вектора скорости ветра.
Поскольку информация о скорости ветра используется при решении многих задач на борту ЛА, то точность данных о скорости ветра имеет существенное значение.
Целью предлагаемого изобретения является повышение точности измерения скорости ветра путем обеспечения инвариантности предлагаемых способа и устройства к погрешности датчика воздушной скорости.
Если ограничиться учетом влияния на точность определения скорости ветра только постоянной составляющей погрешности датчика воздушной скорости ΔV, разностные сигналы по скорости на двух разных курсах Ψ1 и Ψ2 записываются следующим образом:
ΔVE1=VEB1-WE1=UE+ΔVsinΨ1,
ΔVN1=VNB1-WN1=UN+ΔVcosΨ1,
ΔVE2=VEB2-WE2=UE+ΔVsinΨ2,
ΔVN2=VNB2-WN2=UN+ΔVcosΨ2ю.
В результате использования при фильтрации постоянных коэффициентов K1 и K2 измеренные по способу-прототипу составляющие скорости ветра будут определены с ошибками, обусловленными погрешностью датчика воздушной скорости:
UE1*=UE+ΔV sinΨ1,
UN1*=UN+ΔV cosΨ1,
UE2*=UE+ΔV sinΨ2,
UN2*=UN+ΔV cosΨ2.
Решая попарно первое, третье и второе, четвертое уравнения, можно получить решение данной системы уравнений относительно фактических значений составляющих вектора скорости ветра, инвариантное к погрешности измерения воздушной скорости.
Таким образом, поставленная цель достигается тем, что в способе измерения скорости ветра на борту ЛА, основанном на измерении скорости ЛА относительно воздуха и счислении пути пройденного ЛА относительно воздуха, измерении путевой скорости и/или координат местоположения ЛА любым из известных методов, например инерциальным, радиотехническим или визуальным, сравнении путевой скорости со скоростью относительно воздуха и/или сравнении текущих координат с координатами полученными счислением, интегрировании полученных разностных сигналов по скорости и/или координатам, а также измерении курса, крена и тангажа ЛА, производят определение и запоминание скорости ветра в режиме прямолинейного, горизонтального равномерного полета, затем совершают маневр по курсу, переводят ЛА в режим прямолинейного, горизонтального равномерного полета на другом курсе и заново производят определение скорости ветра, после чего фактические значения составляющих скорости ветра UE и UN по осям географической системы координат определяют из выражений:
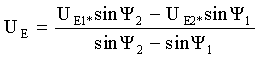
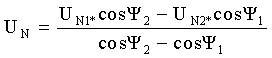
UE1*, UN1*, Ψ1 - соответственно значения составляющих скорости ветра по осям географической системы координат и курс ЛА, запомненные перед началом маневра ЛА по курсу, a UE2*, UN2*, Ψ2 - аналогичные параметры на другом курсе ЛА.
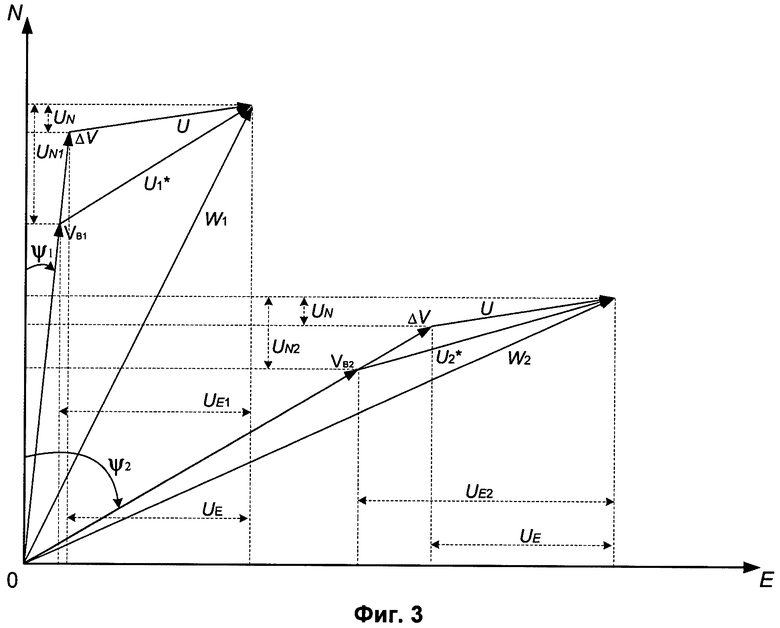
На фиг.3 изображен рисунок характеризующий взаимную ориентацию векторов скорости ветра и воздушной скорости ЛА при различном положении самолетной системы координат, в которой работает датчик воздушной скорости, и земной системы координат.
Составляющие вектора скорости ветра UE*, UN* определяются следующим образом:
где ΔX и ΔY - разностные сигналы по координатам, ΔVX и ΔVY - разностные сигналы по скорости, K1 и K2 - постоянные коэффициенты, подобранные из условия минимума среднеквадратической ошибки по координатам и скорости.
При использовании разностных сигналов по координатам:
ΔХ=ХEB-ХE, ΔY=YNB-YN,
где ХЕ и YN - координаты фактического местоположения ЛА, измеренные любым из известных способов, а ХЕB и YNB получают интегрированием составляющих вектора воздушной скорости в земной системе координат:


VXГ, VZГ - составляющие вектора воздушной скорости в горизонтальной самолетной системе координат:
VXГ=VИ(cos

VZГ=VИ(βСКcosγ-αATsinγ),
VИ - продольная составляющая вектора воздушной скорости, измеряемая датчиком воздушной скорости, αАТ, βCK - углы атаки и скольжения, измеряемые датчиком угла атаки и угла скольжения, Ψ, γ, υ - курс, крен, тангаж, измеряемые датчиком курса и вертикали.
При использовании разностных сигналов по скорости:
ΔVX=VEB-WE, ΔVY=VNB-WN,
где WE и WN - составляющие вектора путевой скорости, измеренные любым из известных способов.
Предлагаемый способ измерения скорости ветра на борту ЛА выгодно отличается от способа-прототипа тем, что измерение скорости ветра производится инвариантным образом относительно погрешности датчика воздушной скорости, что позволяет повысить точность определения составляющих скорости ветра.
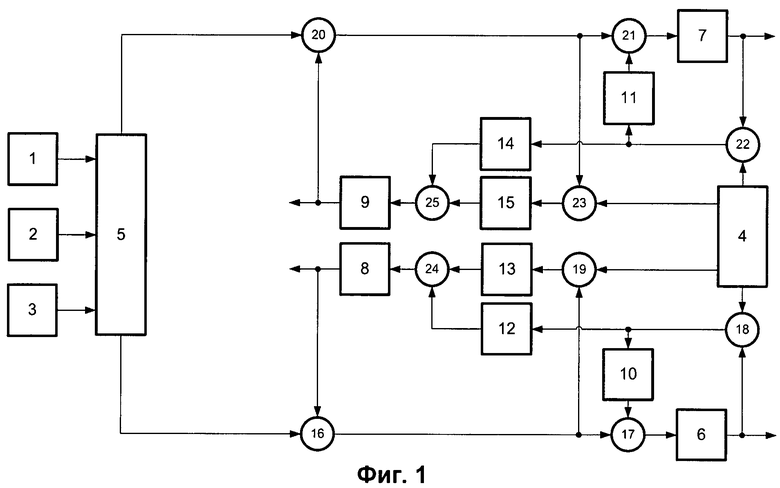
Реализация способа-прототипа в виде устройства, с учетом только существенных для предполагаемого изобретения признаков, может быть представлена в виде функциональной блок-схемы, изображенной на фиг.1.
Устройство-прототип включает в себя:
- датчик воздушной скорости (ДВС) - 1;
- датчик углов атаки и скольжения (ДУАС) - 2;
- датчик курса и вертикали (ДКВ) - 3;
- датчик путевой скорости и координат местоположения (ДСК) - 4;
- блок определения составляющих вектора относительной скорости (БОС) - 5;
- четыре интегратора (И1, И2, И3, И4) - соответственно 6, 7, 8, 9;
- шесть усилителей (У1, У2, У3, У4, У5, У6) - соответственно 10, 11, 12, 13, 14, 15;
- десять сумматоров (C1, С2, С3, С4, С5, С6, С7, С8, С9, С10) - соответственно 6, 17, 18, 19, 20, 21, 22, 23, 24, 25.
Недостатки устройства-прототипа аналогичны недостаткам способа-прототипа, приведенным выше.
Цель изобретения в виде устройства аналогична цели изобретения в виде способа, приведенной выше.
Поставленная цель для устройства, реализующего способ определения скорости ветра на борту ЛА, достигается тем, что в устройство, включающее датчик путевой скорости и координат местоположения, соединенный четырьмя выходами соответственно с первыми входами четвертого, восьмого, третьего и седьмого сумматоров, датчики воздушной скорости, углов атаки и скольжения, курса и вертикали, выходами соединенные с входами блока определения составляющих вектора относительной скорости, два выхода которого соответственно через последовательно соединенные первый сумматор, второй сумматор, первый интегратор, третий сумматор, третий усилитель, девятый сумматор, третий интегратор и последовательно соединенные пятый сумматор, шестой сумматор, второй интегратор, седьмой сумматор, пятый усилитель, десятый сумматор, четвертый интегратор поданы на вторые входы первого и пятого сумматоров, причем вторые входы девятого и десятого сумматоров соответственно через четвертый и шестой усилители соединены с выходами четвертого и восьмого сумматоров, вторые входы которых соединены соответственно с выходами первого и пятого сумматоров, причем выходы третьего и седьмого сумматоров соответственно через первый и второй усилители поданы также на вторые входы второго и шестого сумматоров, введен блок памяти и анализа траектории, четырьмя входами подключенный соответственно к выходам датчика воздушной скорости, датчика курса и вертикали, третьего и четвертого интеграторов, а шестью выходами соединенный с входами вновь введенного блока определения фактического ветра.
Предлагаемое устройство представлено на фиг.2 в виде функциональной блок-схемы и включает в себя:
- датчик воздушной скорости (ДВС) - 1;
- датчик углов атаки и скольжения (ДУАС) - 2;
- датчик курса и вертикали (ДКВ) - 3;
- датчик путевой скорости и координат местоположения (ДСК) - 4;
- блок определения составляющих вектора относительной скорости (БОС) - 5;
четыре интегратора (И1, И2, И3, И4) - соответственно 6, 7, 8, 9;
- шесть усилителей (У1, У2, У3, У4, У5, У6) - соответственно 10, 11, 12, 13, 14, 15;
- десять сумматоров (C1, С2, С3, С4, С5, С6, С7, С8, С9, С10) - соответственно 16, 17, 18, 19, 20, 21, 22, 23, 24, 25,
- блок памяти и анализа траектории (БАТ) - 26;
- блок определения фактического ветра (БФВ) - 27.
Предлагаемое устройство работает следующим образом.
ДВС измеряет продольную составляющую вектора скорости ЛА относительно воздуха - истинную воздушную скорость VИ. В настоящее время для измерения истинной воздушной скорости наибольшее распространение нашли системы, основанные на аэрометрическом методе.
ДУАС измеряет углы ориентации ЛА относительно вектора воздушной скорости - соответственно угол атаки αАТ угол скольжения βСК. В настоящее время для измерения углов атаки и скольжения наибольшее распространение нашли системы, основанные на аэрометрическом методе.
ДВС и ДУАС совместно реализуют функцию измерения вектора воздушной скорости ЛА.
ДСК измеряет скорость ЛА относительно земной поверхности - путевую скорость W и координаты фактического местоположения ХЕ и YN. В настоящее время для измерения составляющих вектора путевой скорости и координат фактического местоположения наибольшее распространение нашли инерциальные, радиотехнические и обзорно-сравнительные (визуальные, по полям рельефа) методы. В частности, для одновременного измерения путевой скорости и координат местоположения, на борту современных ЛА очень широко применяются спутниковые навигационные системы (СНС).
ДКВ измеряет углы ориентации ЛА относительно земной поверхности - курс Ψ, крен γ и тангаж υ. В настоящее время для измерения углов ориентации ЛА наиболее распространены системы, основанные на инерциальном методе. В качестве такого датчика может быть использована инерциальная навигационная система, инерциальная курсовертикаль, совокупность специализированных датчиков курса и вертикали.
В БОС определяются составляющие вектора воздушной скорости ЛА в земной системе координат:
VE=VИ[(cosϑ+αАТsinϑcosγ+βCKsinϑsinγ)sinΨ+(βCKcosγ-αATsinγ)cosΨ],
VN=VИ[(cosϑ+αАТsinϑcosγ+βCKsinϑsinγ)sinΨ-(βCKcosγ-αATsinγ)sinΨ].
В сумматорах C1 и C5 осуществляется учет составляющих скорости ветра UE*, UN*, оценка которых произведена на интеграторах И3 и И4:
VEB=VE+UE*,
VNB=VN+UN*.
Оценка составляющих скорости ветра UE*, UN* на интеграторах И3 и И4 осуществляется в соответствии со следующими зависимостями:
где K1 - постоянный коэффициент усилителей У3 и У5, К2 - постоянный коэффициент усилителей У4 и У6, ΔХ=ХЕВ-ХЕ - разностный сигнал по координате с сумматора С3, ΔY=YNB-YN - разностный сигнал по координате с сумматора С7, ΔVX=VEB-WE - разностный сигнал по скорости с сумматора С4, ΔVY=VNB-WN - разностный сигнал по скорости с сумматора С8, XE И YN - координаты фактического местоположения ЛА, измеренные ДСК, WE и WN - составляющие вектора путевой скорости, измеренные ДСК, ХЕВ и YNB - координаты ЛА, полученные интегрированием в интеграторах И1 и И2 сигналов с сумматоров С2 и С6, в которых суммируются сигналы VEB и VNB с сумматоров С1 и С5 и корректирующие сигналы по координатам с усилителей У1 и У2:
где K3- постоянный коэффициент усилителей У1 и У2.
Вновь введенный блок памяти и анализа траектории БАТ, в процессе естественного полета ЛА, осуществляет поиск участков прямолинейного горизонтального полета с разными курсами и отстоящих во времени друг от друга на допустимую временную величину. Логика работы этого блока, например, может быть следующая.
1. В процессе естественного полета ЛА находится участок прямолинейного горизонтального полета с любым курсом и длительностью по времени ТПП, гарантирующей окончание переходных процессов по оценке составляющих скорости ветра на интеграторах И3 и И4. При нахождении такого участка полета в БАТ запоминаются значения курса Ψ1 из ДКВ и оценки составляющих ветра UE1*, UN1* из И3 и И4.
2. После нахождения участка прямолинейного горизонтального полета с курсом Ψ1, в течении времени ТПВИ, гарантирующего малость пространственно-временной изменчивости скорости ветра, в процессе дальнейшего полета ЛА находится другой участок прямолинейного горизонтального полета с курсом, отличным от Ψ1 и длительностью по времени, гарантирующей окончание переходных процессов по оценке составляющих скорости ветра. При нахождении такого участка полета в БАТ запоминаются значения курса Ψ2 из ДКВ оценки составляющих ветра UE2*, UN2* из И3 и И4.
После нахождения двух участков прямолинейного горизонтального полета с разными курсами из БАТ в блок определения фактического ветра БФВ передаются параметры Ψ1 и Ψ2 и оценки составляющих скорости ветра на этих участках UE1*, UN1*, UE2*, UN2*.
В БФВ составляющие скорости фактического ветра в земной географической системе координат определяются в соответствии со следующими зависимостями:
Выходы БФВ являются выходами устройства по составляющим скорости ветра в земной географической системе координат.
Использование предлагаемых способа и устройства в авиационной аппаратуре позволит увеличить точность решения навигационных и других задач и, следовательно, увеличить эффективность использования ЛА.
Реализация предлагаемых способа и устройства не подразумевает изменение или дополнение аппаратуры, устанавливаемой на борту ЛА, предполагает использование только известных сигналов бортового оборудования ЛА и поэтому изобретение может быть реализовано на существующей технической базе практически на любых типах ЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ СИСТЕМА НАВИГАЦИИ СРЕДНЕЙ ТОЧНОСТИ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2539140C1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ВОЗДУШНОЙ И ЗЕМНОЙ СКОРОСТЕЙ, УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2238521C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА ЗЕМНОЙ СКОРОСТИ И УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2231757C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
Изобретение относится к области авиационного приборостроения и может быть использовано при разработке навигационного оборудования летательных аппаратов. Сущность: измеряют скорость летательного аппарата (ЛА) относительно воздуха. Счисляют путь пройденного ЛА относительно воздуха. Измеряют путевую скорость и/или координаты местоположения ЛА любым из известных методов, например инерциальным, радиотехническим или визуальным. Сравнивают путевую скорость со скоростью относительно воздуха и/или сравнивают текущие координаты с координатами, полученными счислением. Интегрируют полученные разностные сигналы по скорости и/или координатам. Измеряют курс крена и тангажа ЛА. При этом ЛА переводят в режим прямолинейного горизонтального равномерного полета. Определяют и запоминают скорость ветра. Затем совершают маневр по курсу, переводят ЛА в режим прямолинейного горизонтального равномерного полета на другом курсе. Заново определяют скорость ветра. После этого определяют фактические значения составляющих скорости ветра по осям географической системы координат. Устройство, реализующее способ определения скорости ветра, включает взаимосвязанные датчики воздушной скорости, углов атаки и скольжения, курса и вертикали, путевой скорости и координат местоположения, а также блок определения составляющих вектора относительной скорости, четыре интегратора, шесть усилителей, десять сумматоров, блок памяти и анализа траектории, блок определения фактического ветра. Технический результат: повышение точности определения скорости ветра на борту ЛА. 3 ил.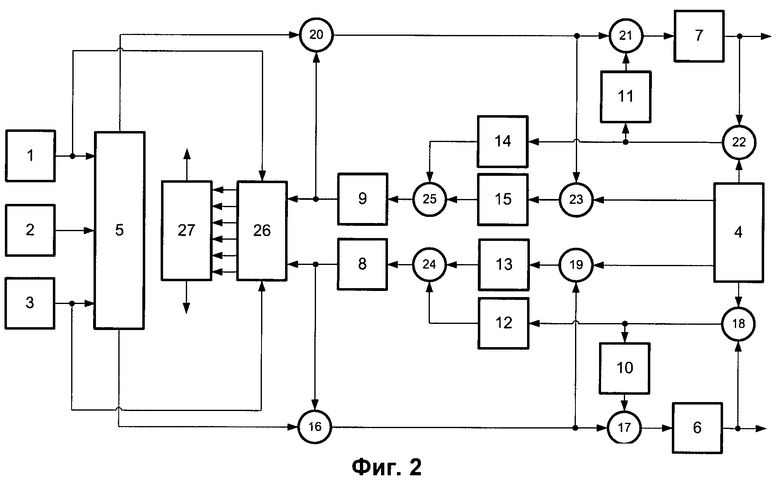
1. Способ определения скорости ветра на борту летательного аппарата (ЛА), основанный на измерении скорости ЛА относительно воздуха и счислении пути пройденного ЛА относительно воздуха, измерении путевой скорости и/или координат местоположения ЛА любым из известных методов, например инерциальным, радиотехническим или визуальным, сравнении путевой скорости со скоростью относительно воздуха и/или сравнении текущих координат с координатами, полученными счислением, интегрировании полученных разностных сигналов по скорости и/или координатам, а также измерении курса, крена и тангажа ЛА, отличающийся тем, что ЛА переводят в режим прямолинейного, горизонтального равномерного полета и производят определение и запоминание скорости ветра, затем совершают маневр по курсу, переводят ЛА в режим прямолинейного горизонтального равномерного полета на другом курсе и заново производят определение скорости ветра, после чего фактические значения составляющих скорости ветра UE и UN по осям географической системы координат определяют из выражений:
где UE1*, UN1*, Ψ1 - соответственно значения составляющих скорости ветра и курс ЛА, запомненные перед началом маневра ЛА по курсу, a UE2*, UN2*, Ψ2 - аналогичные параметры на другом курсе ЛА.
2. Устройство, реализующее способ определения скорости ветра на борту ЛА по п.1, включающее датчик путевой скорости и координат местоположения, соединенный четырьмя выходами соответственно с входами четвертого, восьмого, третьего и седьмого сумматоров, датчики воздушной скорости, углов атаки и скольжения, курса и вертикали, выходами соединенные с входами блока определения составляющих вектора относительной скорости, два выхода которого соответственно через последовательно соединенные первый сумматор, второй сумматор, первый интегратор, третий сумматор, третий усилитель, девятый сумматор, третий интегратор и последовательно соединенные пятый сумматор, шестой сумматор, второй интегратор, седьмой сумматор, пятый усилитель, десятый сумматор, четвертый интегратор поданы на вторые входы первого и пятого сумматоров, причем вторые входы девятого и десятого сумматоров соответственно через четвертый и шестой усилители соединены с выходами четвертого и восьмого сумматоров, вторые входы которых соединены соответственно с выходами первого и пятого сумматоров, причем выходы третьего и седьмого сумматоров соответственно через первый и второй усилители поданы также на вторые входы второго и шестого сумматоров, отличающееся тем, что введен блок памяти и анализа траектории, четырьмя входами подключенный соответственно к выходам датчика воздушной скорости, датчика курса и вертикали, третьего и четвертого интеграторов, а шестью выходами соединенный с входами вновь введенного блока определения фактического ветра.
| СЕЛЕЗНЕВ В.П | |||
| Навигационные устройства - М.: Машиностроение, 1974, с.546-556 | |||
| Измеритель параметров воздушного потока на летательных аппаратах | 1989 |
|
SU1679391A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ В ЛЕТНЫХ ИСПЫТАНИЯХ ЛЕТАТЕЛЬНОГО АППАРАТА НА БОЛЬШИХ УГЛАХ АТАКИ | 2009 |
|
RU2396569C1 |

