Изобретение относится к области механики, в частности к устройствам систем регулирования частоты вращения вала рабочего органа (преимущественно к крановым механизмам и механизмам одноковшовых экскаторов).
Наиболее распространенным является привод, позволяющий получить различные по величине и по направлению частоты вращения вала рабочего органа, состоящий из приводного электрического двигателя, преобразующего электрическую энергию в механическую, ключевых элементов для подведения электрической энергии и ее перераспределения между электрическим двигателем и регулирующими элементами и преобразователя частоты вращения редуктора [1].
Но применительно к повторно-кратковременным режимам работы оборудования наиболее распространенный привод имеет существенные недостатки, заключающиеся в следующем: во первых, в больших затратах электрической энергии, проявляющихся в моменты включения электрического двигателя (ввиду увеличения пускового тока), и приводящие к перегреву его обмоток; во-вторых, во вредном влиянии большой инерционности ротора электрического двигателя, определяющей степень быстродействия привода, и дополнительных потерях электрической энергии на разгон и торможение электрического двигателя; в-третьих, для асинхронных электрических двигателей, наиболее часто применяемых в вышеуказанных устройствах, пусковой режим связан с неустойчивой работой электрического двигателя.
Известна дифференциальная передача металлорежущего станка, включающая червячную [основное движение] и планетарную, в которой от солнечного колеса передача получает дополнительное движение [2].
Основным недостатком известной дифференциальной передачи является необходимость изменения направлений вращении основного и дополнительного валов дифференциальной передали (как недостаток отмечено выше). Также мощность приводного электрического двигателя на дополнительном валу, зависящая от мощности электрического двигателя на основном валу и кинематических данных передачи, требует увеличения установленной мощности для оказания противодействия крутящему моменту на дополнительном валу передачи, т.к. основной вал кинематически связан с дополнительным.
Наиболее близким техническим решением, позволяющим в качестве основного применить нерегулируемый электрический двигатель, является привод [3], содержащий размещенные в корпусе две электромагнитные муфты, дифференциал, зубчатые передачи, входной и выходной валы, выполненную волновой передачу с роликовым генератором волн, ролики которой кинематически связаны с электромагнитными муфтами.
Наряду с достоинством привода, заключающимся в отсутствии необходимости включения электрического двигателя при каждом изменении направления вращения выходного зубчатого колеса, он имеет существенный недостаток, заключающийся в невозможности плавного регулирования частоты вращения вала рабочего органа от нуля до номинальной. Этот недостаток легко может быть устранен, если в [3] применить вместо электромагнитных муфт электромагнитные муфты скольжения. Но тогда привод будет обладать значительным динамическим моментом, связанным с большой инерционностью вращающихся частей электромагнитных муфт скольжения, а, значит, привод будет иметь малое быстродействие.
Приводы кранов механосборочных цехов должны обладать высокой точностью скорости движения при выполнении прецизионных стыковочных операций при сборке узлов конструкции. Задачей изобретения является разработка такого привода, в котором мощность системы управления стремилась бы к нулю - при этом условии функции управления валом рабочего органа при использовании радиоуправления [1] могли бы быть переданы слесарю-сборщику, находящемуся по условиям выполняемой работы в непосредственной близости от места выполнения стыковочных операций. Также при выполнении этой задачи в качестве управляющих элементов могут быть применены полупроводниковые элементы, способные на порядок увеличить точность изменения частоты вращения выходного вала рабочего органа.
Приводы крановых механизмов и механизмов одноковшовых экскаваторов должны отвечать таким требованиям, как:
1. обладать возможностью плавного изменения частоты вращения вала рабочего органа в широком диапазоне;
2. позволять производить изменение направления вращения вала рабочего органа без переключения основного электрического двигателя;
3. иметь сравнительно низкие затраты энергии, потребляемые регулирующим устройством;
4. обладать высоким быстродействием;
5. иметь малые габариты и вес (вместе с системой управления), а также:
6. более низкую стоимость по сравнению с существующими;
7. иметь более высокую надежность (за счет значительного уменьшения контактов аппаратуры управления).
Этим требованиям отвечают предлагаемые приводы. Основным электрическим двигателем является нерегулируемый, простой в изготовлении и надежный в эксплуатации, асинхронный электрический двигатель с короткозамкнутый ротором (или синхронный электрический двигатель), вал которого (по варианту 1) сцеплен с валом генератора волн двух волновых передач, гибким элементом в которых является цепь. Для получения противоположных направлений вращении валов волновых передач (для реверсивного привода) должно выполняться условие:

где Zц.1 и Zц.2 - количество роликов в цепях первой и второй волновых передач;
Zн - количество зубьев наружных колес волновых передач, сцепленных с роликами цепей;
2Z - разность роликов в цепях.
В центре каждой волновой передачи, входящей в состав дифференциальной, имеются зубчатые колеса, с которыми при помощи зубчатых роликов генераторов волн сцеплены цепи. Эти цепи другой группой зубчатых роликов генераторов волн сцеплены с наружными колесами волновых передач, которые имеют жесткое соединение с червячными колесами червячных передач, также входящих в состав дифференциальных. Червячные передачи (применительно к геометрическим размерам червяка) выполнены с условием: угол подъема средней винтовой линии червяка больше угла трения скольжения материалов червячной пары на величину:
где αк - угол трения, создаваемый шариками в шарикоподшипниках на валу червяка;
N - количество шарикоподшипников на залу червяка;
n - количество шариков в шарикоподшипнике;
fк - величина трения качения шариков по обоймам шарикоподшипников, мм;
dн и dв - наружный и внутренний диаметры мест контактов шариков и обойм шарикоподшипников, мм.
При этом условии возникает необходимость вращения дополнительных электрических двигателей только в одном направлении, а мощности электрических двигателей теоретически могут быть равны нулю. Тогда для получения противоположных направлений вращения вала рабочего органа между входными валами дифференциальных передач и валом рабочего органа в кинематическую цепь должен входить дифференциал.
Волновые, имеющие цепь в качестве гибкого элемента, передачи рекомендуется применять для приводов перемещения моста и тележки крана (вообще, для приводов с мощностью на выходном валу не более 20...30 кВт). Для механизма подъема наиболее целесообразно применение планетарных передач. Для того, чтобы в реверсивном приводе можно было использовать только одну планетарную передачу (по варианту 2) необходимо один вал дифференциала кинематически связать с входным валом привода через зубчатые колеса редуктора, а второй вал - с водилом планетарной передачи, входящей в дифференциальную. Первый входной вал (основной) планетарной передачи выполнен за одно целое с входным валом зубчатой передачи, а второй входной вал связан с червяком червячной пары, червячное колесо которой охватывает наружное колесо планетарной передачи. Передаточное отношение кинематической цепи с планетарной передачей должно быть в два раза меньше, чем передаточное, отношение зубчатой передачи (редуктора), что приведет к отсутствию вращения выходного вала привода при вращении червяка с частотой вращения, в два раза меньшей номинальной частоты вращения электрического двигателя, приводящего во вращение червяк. Изложенное выше устройство привода целесообразно применять при мощности основного электрического двигателя не более 75...100 кВт, т.к. затраты электроэнергии (затраты электроэнергии на преодоление трения) окупаются уменьшением стоимости составляющих электрического привода.
В настоящее время разработаны (возможно, только в стадии опытных разработок) пористые антифрикционные сплавы, способные при определенных условиях иметь довольно низкие значения угла трения. Но в этом случае (при условии: угол подъема средней винтовой линии червяка приблизительно равен углу трения, т.к. величина трения качения αк довольно мала) должно произойти резкое увеличение частоты вращения червяка при прочих равных условиях, таких, как передаточные отношения всех передач, входящих в привод. Также увеличивается нормальная составляющая силы, воздействующей на зубья червяка. Таким образом, при применении пористых антифрикционных сплавов целесообразно увеличить угол подъема средней винтовой линии червяка, а электрический двигатель на валу червяка использовать как генератор, работающий на электрическую нагрузку (например, аккумулятор или электрическую печь для обогрева кабины), изменением которой можно регулировать частоту вращения червяка, при этом установленная мощность электрического двигателя на валу червяка должна быть:
где Рч и Рк - мощности на валах червяка и колесе червячной передачи;
α - угол подъема средней винтовой линии червяка;
f - коэффициент трения скольжения материалов червячной пары.
В целях безопасности работы мостовые краны оборудованы концевыми выключателями: переподъема, ограничения хода моста и тележки. Это вызывает усложнение конструкции крана и сложности при эксплуатации концевых выключателей, т.к. они располагаются в труднодоступных местах и требуют прокладки кабелей от шкафов управления до мест их установки. Кроме того, краны не имеют концевого выключателя, сигнализирующего "излишнее сматывание каната" с барабана. Само сматывание с барабана для каната не опасно, но при наматывании свободно висящего каната на барабан он может не лечь в пазы барабана, специально для этого предназначенные. Поэтому валы червяков должны быть оборудованы пружинами предельного усилия, позволяющими при повышении этого усилия червякам смещаться в продольном направлении и воздействовать на концевые выключатели, установленные в корпусе привода, где их контакты меньше подвержены вредному влиянию атмосферы. Для концевого выключателя "излишнего сматывания каната" необходимо применять механизм предельного ослабления пружины.
Анализ динамики вышеописанных приводов показывает, что передача момента валу рабочего органа производится от нерегулируемого (по частоте вращения) электрического двигателя, более надежного и дешевого, с мощностью, достаточной для развития необходимого момента, а регулирование частоты вращения выходного вала привода производится регулируемыми электрическими двигателями малой мощности. Таким образом, происходит распределение функций между входными валами дифференциальной передачи привода.
При изучении в вышеуказанной области техники других известных технических решений признаки (обеспечение распределения функций между валами дифференциальной передачи, применение одного генератора волн для двух волновых передач, сочетание зубчатой передачи и планетарной для получения реверсирования выходного вала, угол подъема средней винтовой линии червяка больше угла трения скольжения материалов червячной пары на величину угла трения, создаваемого шариками в шарикоподшипниках на валу червяка), ОТЛИЧАЮЩИЕ заявляемое изобретение от прототипа, не были выявлены, и поэтому они обеспечивают заявляемому техническому решению соответствие критерию изобретения "НОВИЗНА".
На чертежах представлены:
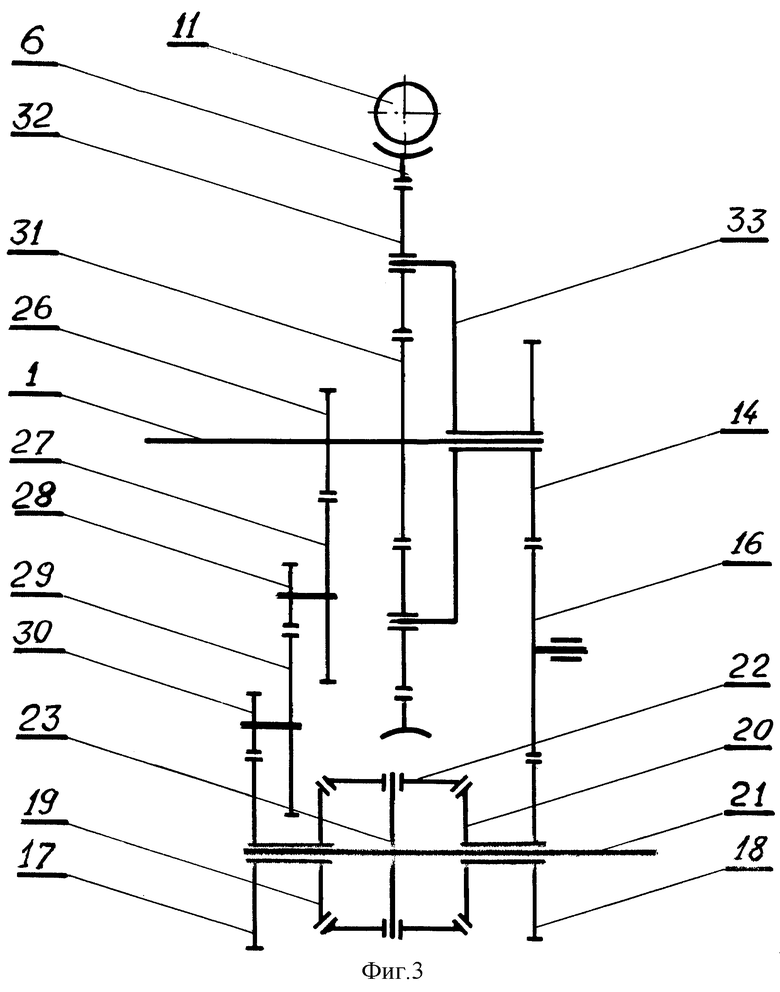
фиг.1 и 3 - кинематические схемы привода;
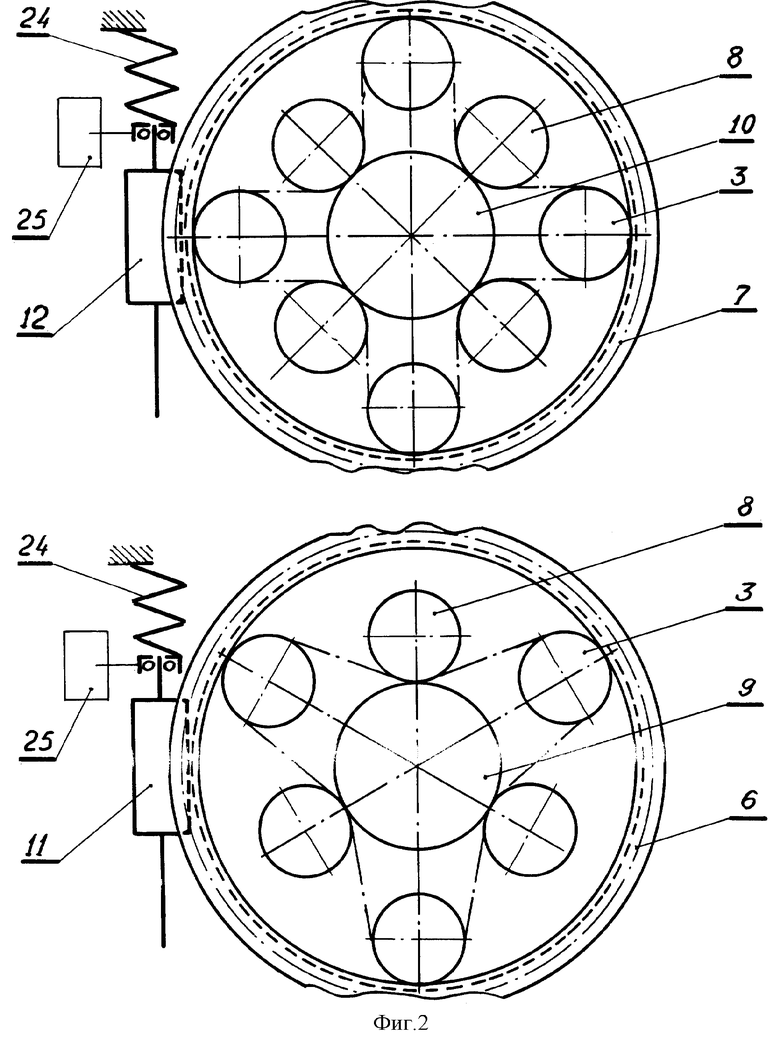
фиг.2 - кинематические схемы волновых передач.
Привод (фиг.1) состоит из входного вала 1, связанного с генератором волн 2, приводящим в движение группы роликов 3 генератора волн, сцепленных при помощи роликов цепей 4 и 5 с наружными зубчатыми колесами 6 и 7 волновых передач. Другие группы роликов 8 генератора волн сцеплены с внутренними колесами 9 и 10 волновых передач. Наружные зубчатые колеса, охваченные червячными колесами, сцеплены с червяками 11 и 12. На одних валах с колесами 9 и 10 находятся также зубчатые колеса 13 и 14, сцепленные через промежуточные колеса 15 и 16 (эти колеса могут отсутствовать) с колесами 17 и 18. На одном валу с зубчатым колесом 17 находится зубчатое колесо 19 дифференциала, а на одном валу с колесом 18 находится колесо 20. Выходной вал 21 при помощи колес 22, свободно вращающихся на оси 23, сцеплен с колесами 19 и 20 дифференциала. Червяки 11 и 12 установлены с возможностью перемещения в осевом направлении и удерживаются противодействующими пружинами 24 с усилием, момент которого уравновешивает статический момент сопротивления на валу червячного колеса. Корпус упорных подшипников на валах червяков связан с концевыми выключателями 25 (фиг.2).
Привод (фиг.3) состоит из входящих в первую кинематическую схему вала 1, наружного колеса, выполненного за одно целое с червячным колесом 6, червяка 11, зубчатых колес 14, 16, 17, 18 и дифференциала 19, 20, 22, 23 и выходного вала 21. Также в состав привода входят: зубчатые колеса 26, 27, 28, 29 и 30, образующие редуктор, зубчатое колесо 31, сцепленное с зубчатыми колесами 32, свободно установленными на осях водила 33 ПЛАНЕТАРНОЙ ПЕРЕДАЧИ.
Привод (фиг.) работает следующим образом. Вал 1 приводится во вращение от нерегулируемого электрического двигателя с моментом, необходимым для преодоления статического момента сопротивления на валу 21. Валы червяков 11 и 12 приводятся во вращение от регулируемых электрических двигателей малой мощности, т.к. направление их вращения совпадает с направлением статического момента сопротивления на их валах.
При включении нерегулируемого электрического двигателя (основного) начинает вращаться вал 1, приводя во вращение ролики генератора волн 3, сцепленных с наружными колесами 6, и 7, и 8, сцепленные с внутренними колесами 9 и 10 цепной волновой передачи. Т.к. количество роликов цепи 4 меньше количества зубьев колеса 6, а количество роликов цепи 5 на такую же величину больше количества зубьев зубчатого колеса 7, то зубчатые колеса 9 и 10 будут вращаться в разные стороны с одинаковой частотой вращения, т.к. колеса 6 и 7, как и колеса 9 и 10, имеют одинаковое количество зубьев. Посредством зубчатых колес 13, 15 и 17 и колес 14, 16 и 18 колеса 19 и 20 будут вращаться также с одинаковыми частотами вращения, но в разные стороны, и ось 23, на которой установлены колеса 22, будет неподвижна. При приведении во вращение червяков 11 и 12 в разные стороны, но с одинаковой частотой вращения ось 23 будет также неподвижна. Изменяя частоту вращении валов червяков 11 и 12 (увеличивая у одного и уменьшая у другого) приводится во вращение выходной вал привода 21, направление вращения которого зависит от направления изменения частоты вращения червяков. Так как одновременно в работе принимают участие обе волновые передачи, то частота вращения приводного электрического двигателя может быть увеличена в два-три раза (вес такого электрического двигателя меньше, и стоимость его ниже по сравнению с электрическим двигателем на более низкую частоту вращения).
Привод (фиг.3) работает следующим образом. От входного вала 1 через зубчатые колеса 26, 27, 28, 29, 30 и 17 вращение получает колесо 19 дифференциала. Колесо 20 дифференциала получает вращение через планетарную передачу 6, 31, 32 и 33 и зубчатые колеса 14, 16, 18. Колеса дифференциала 19 и 20 вращаются в противоположных направлениях. Так как передаточное отношение кинематической цепи 31, 32, 33, 34, 16 и 18 в два раза меньше, то колеса 17 и 18 будут вращаться с одинаковыми частотами вращения при вращении червячного колеса 6, а значит, и червяка 11 с частотой вращения, равной половине номинальной частоты вращения (nн) червяка 11. Регулирование частоты вращения вала 21 производится изменением частоты вращения червяка 11, причем если частота вращения червяка уменьшается от nн/2 до нуля (где nн - номинальная частота вращения электрического двигателя), то выходной вал 21 вращается в одном направлении, а если увеличивается от nн/2 до nн, то выходной вал вращается в противоположном направлении.
При использовании электрического двигателя в качестве генератора привод (фиг.1) работает следующим образом. При включении основного нерегулируемого по частоте вращения электрического двигателя и при наличии статического момента на выходном валу привода червяки приводятся во вращение, т.к. угол подъема средней винтовой линии червяков значительно больше угла трения материалов червячной пары. Для регулирования частоты вращения выходного вала привода электрические двигатели, приводящие во вращение червяки, поочередно переводят в режим генераторов (в зависимости от необходимого направления вращения выходного вала привода).
Волновые передачи (с использованием цепей в качестве гибкого элемента) могут быть заменены на планетарные при использовании одного входного вала для обеих дифференциальных передач. Для этого между зубчатыми колесами 14 и 16 в кинематическую цепь поместить еще одно зубчатое колесо.
Источники информации
1. А.Г.Меклер. Электрооборудование поточно-транспортных машин. М.: Машгиз, 1959 г., с 308...316, 358...361.
2. Н.Ф.Руденко. Планетарные передачи. М.: Машгиз, 1947 г., с 90.
3. Авт. св. 1569466, приор. 15.09.87 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗУБЧАТАЯ ПЕРЕДАЧА С ПЕРЕМЕННОЙ СКОРОСТЬЮ | 2003 |
|
RU2247271C2 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Механизм подачи очистного комбайна | 1990 |
|
SU1765391A1 |
| ДИФФЕРЕНЦИАЛЬНАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА В.П.ДЕМИНА | 1989 |
|
RU2010138C1 |
| Ткацкий станок | 1989 |
|
SU1622449A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| Двухпоточная бесступенчатая коробка передач | 1981 |
|
SU1229483A1 |
| Газотурбинная судовая энергоустановка | 1990 |
|
SU1815368A1 |
| Товарный регулятор ткацкого станка | 1989 |
|
SU1654389A1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
Изобретение относится к машиностроению, в частности к устройствам систем регулирования частоты вращения вала рабочего органа. Привод содержит корпус, нерегулируемый электрический двигатель, регулируемые электрические двигатели, входной 1 и выходной 21 валы, зубчатые передачи, дифференциальные передачи, образованные двумя волновыми передачами с общим генератором волн 3 и червячными передачами, и дифференциал. Валы червяков 11 и 12 червячных передач приводятся во вращение от регулируемых электрических двигателей. Наружные зубчатые колеса 6 и 7 волновых передач сцеплены с червяками 11 и 12. Внутренние зубчатые колеса 9 и 10 волновых передач кинематически связаны с колесами 19 и 20 дифференциала, который связан с выходным валом 21 привода. Две волновые передачи выполнены цепными и связаны условиями: Zц1+Zц2=2Zн; 2ц1+Z=Zц2-Z, где Zц1, Zц2 - количество роликов в цепях первой и второй волновых передач; Zн - количество зубьев наружных колес волновых передач, сцепленных с роликами цепей; 2Z - разность роликов в цепях. Технический результат - возможность изменения направления вращения и частоты вращения вала рабочего органа в широком диапазоне, повышение быстродействия и надежности. 2 н. и 3 з.п. ф-лы, 3 ил.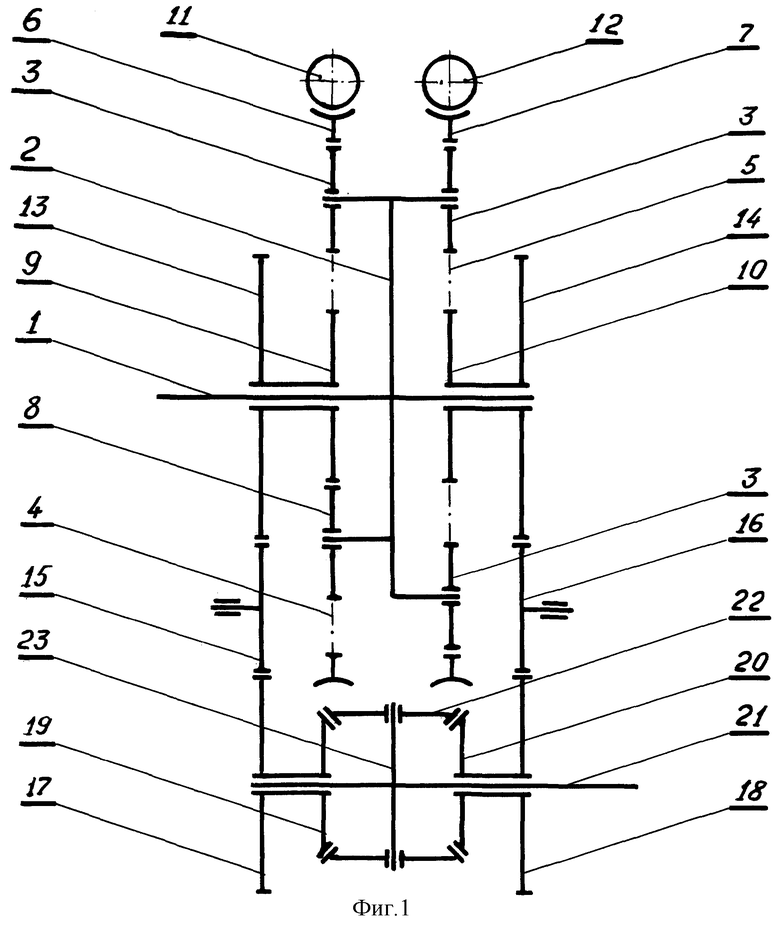

где Zц1, Zц2 - количество роликов в цепях первой и второй волновых передач;
Zн - количество зубьев наружных колес волновых передач, сцепленных с роликами цепей;
2Z - разность роликов в цепях.
αк=arctg [Nnfk(2/dН+2/dВ)], где
αк - угол трения, создаваемый шариками в шарикоподшипниках на валу червяка;
N - количество шарикоподшипников на валу червяка;
n - количество шариков в шарикоподшипнике;
fk - величина трения качения шариков по обоймам шарикоподшипника, мм;
dН, dВ - наружный и внутренний диаметры мест контактов шариков и обойм шарикоподшипников, мм.
Рч=Рк(tgα-fcos2α),
где
Рч и Pк - мощности на валах червяка и колеса червячной передачи;
α - угол подъема средней винтовой линии червяка;
f - коэффициент трения скольжения материалов червячной пары.
| RU 95104554 A1, 27.11.1996 | |||
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1996 |
|
RU2076255C1 |
| Механический усилитель мощности | 1990 |
|
SU1772495A1 |
| Механизм подачи очистного комбайна | 1990 |
|
SU1765391A1 |
| ЗУБЧАТЫЙ ВАРИАТОР | 1997 |
|
RU2136988C1 |
| СПОСОБ ДИАГНОСТИКИ ФОРМЫ ТЯЖЕСТИ ИНФЕКЦИОННОГО МОНОНУКЛЕОЗА | 2017 |
|
RU2638801C1 |
| СТИРАЛЬНАЯ МАШИНА | 2016 |
|
RU2714950C2 |

