Изобретение относится к области двигателестроения, компрессоростроения, а именно к устройству преобразования вращательного движения в возвратно-поступательное (и наоборот).
Известны устройства преобразования вращательного движения в возвратно-поступательное, содержащие кривошипно-шатунный механизм; содержащие бесшатунный механизм Баландина (cм. С.С. Баландин. Бесшатунные двигатели внутреннего сгорания. - Машиностроение, 1972, с. 19, 20, рис.13); содержащие вращающийся в одном направлении диск с зубьями, которые находятся в поочередном зацеплении с зубчатыми рейками подвижной рамки (см. патент ФРГ 3529921, кл. F 02 B 75/32, 1987; см. "Механизмы" /Под ред. С.Н. Кожевникова.- Машиностроение 1976, с. 488, рис.7.120.; см. Публикация PCT/US 95/05708, WO/30846, 1995; см. патент RU 2151894 С1, кл. F 02 В 75/32, 27.06.2000).
Наиболее близким по технической сущности к предлагаемому техническому решению является устройство преобразования вращательного движения в возвратно-поступательное, содержащее: цилиндр с поршнями, оппозитно закрепленными на подвижной рамке, две зубчатые рейки, выполненные на внешних сторонах рамки, два ведущих вала с осями вращения, расположенными вне блока поршней и две шестерни с зубчатыми секторами, размещенные по одной на каждом валу с возможностью синхронного вращения в одном направлении и с возможностью периодического взаимодействия с соответствующими зубчатыми рейками (см. патент RU 2151894 С1, кл. F 02 В 75/32, 27.06.2000).
В указанном устройстве вращающиеся шестерни поочередно входят в зацепление с левой и правой зубчатыми рейками подвижной рамки, передавая через них окружное усилие и изменяя направление возвратно-поступательного движения подвижной рамки после переключения зацепления с одной секторной шестерни на другую.
Однако существует несколько причин, по которым данный механизм не может быть применен в двигателях и компрессорах:
во-первых, масса подвижной рамки по сравнению, например, с массой шатуна обычного двигателя внутреннего сгорания оказывается явно завышенной, что при прочих равных условиях снижает предел быстроходности устройства;
во-вторых, в рассматриваемой конструкции на площади контакта упорного выступа секторной шестерни с упорной выточкой на зубчатой рейке имеют место ударные нагрузки, связанные с разной линейной скоростью входящих в контакт элементов. Это значит, что в механизме на среднем радиусе контактной площади поверхности не реализован принцип согласования линейной окружной скорости ведущего вала с линейной скоростью подвижной рамки с поршнями.
В-третьих, в момент посадки упорной выточки подвижной рамки на упорный выступ первой секторной шестерни вторая оказывается уже вышедшей из зацепления, что вводит ошибку шага и создает момент неопределенности в кинематике движения, дополнительно усиливая ударные нагрузки от переменного характера работы газовых сил и сил трения.
Отмеченные недостатки не позволяют реализовать конструктивные и технологические преимущества данного типа устройств, обусловленные отсутствием коленчатого вала.
Задачей изобретения является: существенное уменьшение массы поступательно движущихся деталей и снижение инерционных нагрузок, возникающих при смене направления возвратно-поступательного движения.
Задача изобретения решается тем, что устройство снабжено шатуном и продольными упорами, причем зубчатые рейки и продольные упоры размещены на противоположных сторонах шатуна и по торцам продолжены в обе стороны дугами опорных цилиндрических поверхностей с сектором, примерно равным четверти окружности, с возможностью перекатывания по ним участков шестерен, свободных от зубцов, и с возможностью согласованного взаимодействия участка, свободного от зубцов, каждой шестерни с соответствующими дугами опорных цилиндрических поверхностей и поверхностями продольных упоров, причем каждая шестерня установлена на валу устройства с возможностью реализации частью ее поверхности, свободной от зубцов, функции перекатывающегося рычага между осью вращения вала и линией контакта шестерни с поверхностью опорных цилиндрических дуг соответствующей стороны шатуна, а центр радиуса шестерен смещен по отношению к оси вращения выходных валов на величину эксцентриситета.
Полученный технический результат характеризуется следующими новыми существенными признаками:
- устройство снабжено шатуном и продольными упорами, причем зубчатые рейки и продольные упоры размещены на противоположных сторонах шатуна и по торцам продолжены в обе стороны дугами опорных цилиндрических поверхностей с сектором, примерно равным четверти окружности, с возможностью перекатывания по ним участков шестерен, свободных от зубцов, и с возможностью согласованного взаимодействия участка, свободного от зубцов, каждой шестерни с соответствующими дугами опорных цилиндрических поверхностей и поверхностями продольных упоров;
- каждая шестерня установлена на валу устройства с возможностью реализации частью ее поверхности, свободной от зубцов, функции перекатывающегося рычага между осью вращения вала и линией контакта шестерни с поверхностью опорных цилиндрических дуг соответствующей стороны шатуна;
- центр радиуса шестерен смещен по отношению к оси вращения выходных валов на величину эксцентриситета.
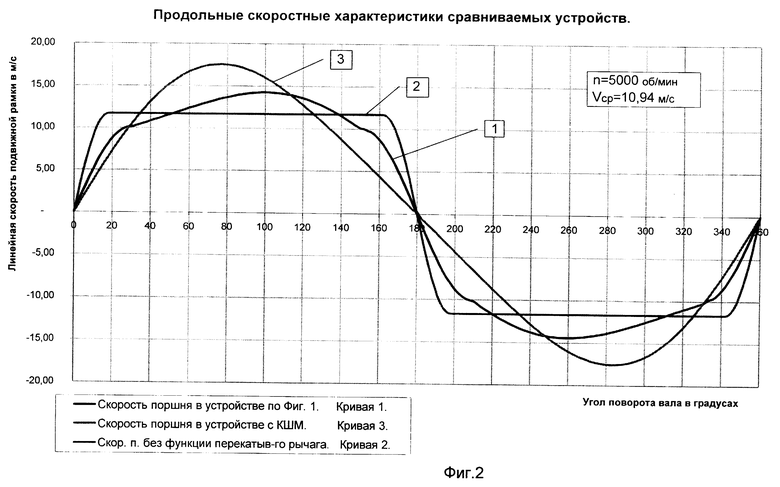
На фиг. 1 показана конструктивная схема заявленного устройства преобразования движения. На фиг.2 приведен сравнительный график продольных скоростных характеристик движения для трех устройств.
Устройство преобразования вращательного движения в возвратно-поступательное (фиг.1) включает в себя:
подвижный корпус 7, помещенный в неподвижный корпус 8 и имеющий в нем возможность продольного возвратно-поступательного движения. Шатун 1, соединенный с подвижным корпусом 7 (например, с поршнем) через проушину и палец 6 и имеющий относительно него возможность поперечного возвратно-поступательного перемещения (качания). Левый и правый ведущие валы с шестернями 2, находящимися в постоянном контакте с шатуном 1 и имеющими возможность синхронного вращения в одну сторону. Зубчатые рейки 4 равной длины и продольные упоры 3, размещенные на противоположных (левой и правой) сторонах шатуна 1 и продолженные в обе стороны от своих торцов опорными цилиндрическими дугами 5 с возможностью перекатывания по ним участков шестерен, свободных от зубцов, и с возможностью согласованного взаимодействия участка, свободного от зубцов, каждой шестерни с соответствующими дугами опорных цилиндрических поверхностей и поверхностями продольных упоров.
Для обеспечения возможности фиксации крайнего левого и крайнего правого положения шатуна 1 относительно шестерен 2 имеются продольные упоры 4, закрепленные на левой и правой сторонах шатуна, и секторы окружности шестерни 2, свободные от зубцов. При этом центры Ц2 шестерен 2 смещены относительно осей вращения Ц1 ведущих валов на величину эксцентриситета е, а переменный радиус Ri между центрами валов Ц1 и линией контакта шестерен с поверхностями опорных дуг образует возможность реализации функции перекатывающегося рычага для поверхностей шестерен 2, свободных от зубцов.
Устройство преобразования вращательного движения в возвратно-поступательное (фиг.1) работает следующим образом.
Исходное положение шатуна 1 - положение в ВМТ (положение по фиг.1). Для выбранного момента времени обе шестерни 2, установленные на ведущих валах строго симметрично, находятся в контакте с шатуном 1 по линиям на опорных дугах 5. В зоне торцевых зубьев зубчатых реек 4 шестерни 2 имеют некоторое перекрытие и рабочие зазоры. С началом синхронного вращения ведущих валов от положения ВМТ (например, по часовой стрелке) поверхности шестерен 2, свободные от зубцов и имеющие возможность реализации функции перекатывающегося рычага, перекатываются по поверхностям нижних опорных дуг 5 шатуна 1, обеспечивая смещение шатуна 1 влево и начало его продольного движения. При этом зубчатый участок левой шестерни 2 входят в зацепление с левой зубчатой рейкой шатуна 1, а участок поверхности правой шестерни 2, свободный от зубцов, выходит на опорную поверхность правого продольного упора 4. Одновременно происходит интенсивный рост скорости V шатуна 1 в направлении оси Y-Y. Однако введение в конструкцию эксцентриситета е между центом Ц2 радиуса шестерен 2 и центром выходных валов Ц1, а также введение возможности реализации функции перекатывающегося рычага, создает меньшие градиенты роста поступательной скорости V шатуна 1, чем градиенты роста поступательных скоростей V в устройстве без эксцентриситета и без возможности реализации функции перекатывающегося рычага (cм. в сравнении кривые 1 и 2 на фиг.3), т.к. окружные скорости на линии контакта шестерен 2 с поверхностями опорных дуг шатуна 1 изменяются по углу поворота вала пропорционально изменению радиуса Ri, проведенного от центров ведущих валов к линиям контакта. В результате снижаются значения начальных пиковых ускорений. Следовательно, уменьшаются и инерционные нагрузки на детали, определяемые фактором снижения ускорений.
Одновременно за счет компоновочных преимуществ описанной схемы уменьшается потребная длина шатуна и резко (более чем в два раза) снижается его масса. Это обеспечивает дополнительную возможность уменьшения инерционных нагрузок, определяемых фактором снижения массы.
Далее левая шестерня 2 перекатывается своими зубьями по зубчатой рейке 4 левой стороны, а участок поверхности, свободный от зубцов, правой шестерни 2 скользит во встречном движении по поверхности продольного упора 3 правой стороны шатуна 1. В этой части движения продольная скорость V шатуна 1 продолжает плавно нарастать до максимума и затем снижается до значения, имевшего место в начале участка (см. кривую 1, фиг.3; диапазон угла поворота участка 30-150o).
В процессе дальнейшего движения шестерен 2 их участки, свободные от зубцов, накатываются (по мере синхронного поворота) на соответствующие поверхности верхних опорных дуг шатуна 1. Накатывание участков шестерен 2, свободных от зубцов, на поверхности верхних опорных дуг шатуна 1 и переход шестерен 2 в положение НМТ (зеркально к положению на фиг.1) сопровождается интенсивным снижением продольной скорости V шатуна 1 до V=0 (См. кривую 1, точка 180o, фиг.3) с выходом зубьев левой шестерни 2 из зацепления с левой зубчатой рейкой и сходом правой шестерни 2 с поверхности правого продольного упора 3 правой стороны шатуна 1. Однако градиенты снижения скорости V и на этом участке ввиду наличия эксцентриситета е и возможности реализации функции перекатывающегося рычага остаются значительно ниже, чем в устройстве без нее (см. кривую 1 и 2, фиг.3). Соответственно снижены и инерционные нагрузки торможения шатуна 1 и подвижного корпуса 7 в направлении оси Y-Y.
Процесс дальнейшего перекатывания шестерен 2 по шатуну 1, а именно их перекатывание с переходом зубчатого участка правой шестерни 2 в зацепление с правой зубчатой рейкой и выходом участка левой шестерни 2, свободного от зубцов, на поверхность левого продольного упора, а затем их накатывание на поверхности нижних опорных дуг и все происходящие при этом процессы аналогичны описанным.
Кинематика и динамика работы устройства имеет несколько важных особенностей, выгодно отличающих его от механизмов других типов:
- момент поочередного переключения нагрузки между левой и правой шестернями 2, выраженный в смене линий контакта между ними, осуществляется в устройстве плавно, практически при нулевой поступательной скорости шатуна 1 и при равных поперечных линейных скоростях в зонах действия сил сцепления левой и правой шестерен 2 с дугами 5 шатуна, т.е. исключена возможность механических ударов при условии соблюдения точности изготовления;
- выбор больших отношений S/D, применяемых в двигателестроении, не ограничен диаметром цилиндра, т.к. стержень профиля шатуна находится вблизи осевой линии цилиндра и совершает относительно нее рабочие колебания небольшой амплитуды, а компенсирующий рост габаритов механизма с ростом выбираемых S/D происходит в основном за счет линейного размера шатуна 1 и диаметра шестерен 2, помещенных ниже плоскости среза цилиндра, что не вызывает ограничений на его диаметр;
- сила переменного бокового давления подвижного корпуса 7 (например, поршня) на направляющую стенку неподвижного корпуса 8 (например, цилиндра) сведена к минимуму, т.к. величина отношения расстояния между осевой линией устройства и точкой контакта шестерни 2 с шатуном 1 к расстоянию между осью качания шатуна (центром пальца 6) и той же точкой контакта в среднем примерно в 3 раза меньше, чем у прототипа, и примерно в 6 раз меньше, чем в устройстве с кривошипно-шатунным механизмом. Т.е. большая часть реактивного момента образуется непосредственно на неподвижном корпусе устройства на плече между осью ведущего вала и осью цилиндра, минуя цилиндропоршневую группу.
Введение в устройство шатуна с продольными упорами, размещение зубчатых реек и продольных упоров на противоположных сторонах шатуна и их продолжение по торцам в обе стороны дугами опорных цилиндрических поверхностей с сектором, примерно равным четверти окружности, с возможностью перекатывания по ним участков шестерен, свободных от зубцов, и с возможностью согласованного взаимодействия участка, свободного от зубцов, каждой шестерни с соответствующими дугами опорных цилиндрических поверхностей и поверхностями продольных упоров, обеспечило резкое снижение массы поступательно движущихся деталей и, как следствие, уменьшило инерционные нагрузки, определяемые фактором снижения массы.
Установка каждой шестерни на валу устройства со смещением центра радиуса шестерен по отношению к оси вращения выходных валов на величину эксцентриситета с обеспечением возможности реализации частью их поверхности, свободной от зубцов, функции перекатывающегося рычага между осью вращения вала и линией контакта шестерен с поверхностью опорных цилиндрических дуг соответствующей стороны шатуна позволила значительно снизить инерционные нагрузки, определяемые фактором уменьшения ускорений.
При этом примерно в 3 раза уменьшена сила бокового давления поршня на стенку неподвижного корпуса по сравнению с прототипом и примерно в 6 раз в сравнении с обычным кривошипно-шатунным механизмом.
Изобретение относится к двигателестроению, компрессоростроению, а именно к устройству преобразования вращательного движения в возвратно-поступательное и наоборот. Целью изобретения является расширение диапазона возможных отношений S/D, уменьшение массы поступательно движущихся деталей и снижение инерционных нагрузок при смене направления возвратно-поступательного движения. Новым в устройстве является то, что оно снабжено шатуном с продольными упорами, размещенными на его противоположных сторонах, на каждой из которых расположена одна из упомянутых зубчатых реек. Каждая рейка по торцам продолжена в обе стороны дугами опорных цилиндрических поверхностей с сектором, примерно равным четверти окружности, с возможностью перекатывания по ним участков шестерен, свободных от зубцов, и с возможностью согласованного взаимодействия участка, свободного от зубцов, каждой шестерни с соответствующими дугами опорных цилиндрических поверхностей и поверхностями продольных упоров. 2 з.п.ф-лы, 2 ил.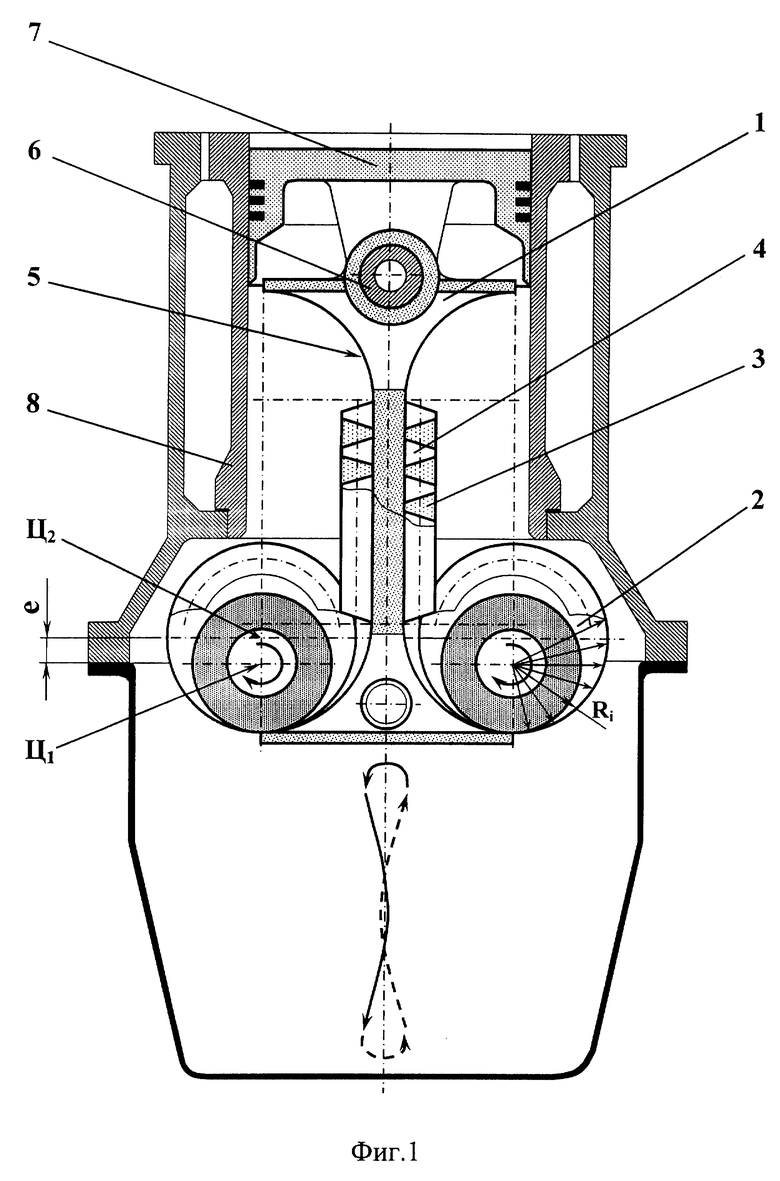
| ПРИВОДНОЙ МЕХАНИЗМ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2151894C1 |
| БЕСШАТУННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1994 |
|
RU2078943C1 |
| RU 2059831 С1, 10.05.1996 | |||
| БЕСШАТУННЫЙ МЕХАНИЗМ ПОРШНЕВЫХ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 1990 |
|
RU2090768C1 |
| DE 3529921 А1, 16.10.1986 | |||
| СПОСОБ СТЕРИЛИЗАЦИИ КОМПОТА ИЗ ЧЕРЕШНИ | 2012 |
|
RU2621077C2 |
| US 4270395, 02.06.1981 | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

