Изобретение относится к области гироскопического приборостроения и предназначено для определения неортогональности осей чувствительности трехосного лазерного гироскопа (ТЛГ) при проведении калибровок (паспортизации) бесплатформенных инерциальных навигационных систем, построенных на основе ТЛГ, или их составных частей.
ТЛГ содержит три оси чувствительности, образующие трехгранный угол, у которого три плоских угла номинально должны быть прямыми. То есть, оси чувствительности гироскопа номинально должны быть взаимно ортогональны, но после изготовления они имеют «отклонение» от номинального положения. Величину этого «отклонения», то есть неортогональность осей чувствительности ТЛГ, необходимо определить.
Известен способ определения неортогональности осей чувствительности ТЛГ моноблочной конструкции (Федоров А.Е., Рекунов Д.А., Переляев С.Е., Челноков Ю.Н. Калибровка блока инерциальных чувствительных элементов и моделирование автономного режима функционирования инерциальной системы на базе монолитного трехкомпонентного лазерного гироскопа // Новости навигации, 2010, №3, с. 20-25) в составе блока чувствительных элементов (БЧЭ). Данный способ основан на итерационном методе определения поправок к ортогональной матрице перехода от трехгранника осей чувствительности гироскопа (1, 2, 3) к трехграннику осей приборной системы координат (ХП, YП, ZП), образованной строительными осями БЧЭ. При этом предполагается, что главная диагональ (ось симметрии) трехгранного угла ТЛГ соосна вертикальной оси Zn приборной системы координат БЧЭ. Две горизонтальные оси (ХП и YП) приборной системы координат БЧЭ образуют плоскость, которая номинально расположена под одинаковым углом 35°15'52'' к осям чувствительности ТЛГ.
Сущность данного способа заключается в следующем. БЧЭ закрепляют на планшайбе наклонно-поворотного стола таким образом, чтобы в начальном положении оси приборной системы координат БЧЭ (ХП, YП, ZП) совпадали с осями наклонно-поворотного стола. Исходя из ориентации осей чувствительности ТЛГ (1, 2, 3) в БЧЭ, заданных в конструкторской документации, формируют первое приближение ортогональной матрицы А перехода от трехгранника осей чувствительности ТЛГ к трехграннику осей приборной системы координат. Например, для случая, когда проекция первой оси чувствительности гироскопа на плоскость, образованную двумя горизонтальными осями (ХП и YП) приборной системы координат БЧЭ, совпадает со строительной осью YП БЧЭ, а проекции двух других осей чувствительности ТЛГ (второй и третей) на эту плоскость образуют со строительной осью ХП БЧЭ углы, равные минус  и соответственно, матрица перехода А имеет вид:
и соответственно, матрица перехода А имеет вид:

Затем проводят уточнение матрицы перехода А. Данная процедура проводится последовательно, итерационным методом, по результатам регистрации трех плоских поворотов ТЛГ на заданные углы относительно осей приборной системы координат. На первой итерации выполняют поворот БЧЭ на произвольный угол, например, вокруг оси YП его приборной системы координат. При точном соответствии оси поворота стола и оси YП, компоненты вектора поворота относительно осей ХП и ZП должны равняться нулю. Отклонение их от нуля устраняется умножением матрицы перехода А на «уточняющую» матрицу Т, которую можно определить из выражения:

где (λ1,λ2,λ3) и(λX,λY,λZ) _ компоненты вектора поворота (векторные
части кватерниона конечного поворота) в трехгранниках осей чувствительности ТЛГ и приборной системы координат БЧЭ соответственно;
А - матрица, полученная на предыдущей итерации;
Т - «уточняющая» матрица для текущей итерации.
На следующих итерациях аналогичным образом выполняют повороты БЧЭ вокруг других осей приборной системы координат (ХП и ZП), каждый раз определяя «уточняющую» матрицу по выражению (2). Определив на конечной итерации элементы «уточняющей» матрицы Т, ее представляют в виде произведения трех матриц:

где K - диагональная матрица, элементы которой соответствуют поправкам масштабных коэффициентов осей чувствительности ТЛГ;
S - симметрическая матрица, элементы которой соответствуют «отклонениям» (неортогональности) осей чувствительности ТЛГ относительно осей приборной системы координат БЧЭ;
U - кососимметрическая матрица, элементы которой соответствуют развороту трехгранника осей ТЛГ относительно трехгранника осей БЧЭ.
Из выражения (3), зная девять элементов матрицы Т, составляют систему из девяти линейных уравнений и рассчитывают неизвестные элементы матриц K (k11, k22, k33), S (s12, s23, s13) и U (u12, u23, u13). Найденные элементы матрицы  характеризуют неортогональность осей чувствительности ТЛГ. Данный способ является наиболее близким по технической сущности к заявляемому изобретению и выбран в качестве наиболее близкого аналога.
характеризуют неортогональность осей чувствительности ТЛГ. Данный способ является наиболее близким по технической сущности к заявляемому изобретению и выбран в качестве наиболее близкого аналога.
Известный способ имеет следующие недостатки:
- начальное совпадение осей приборной системы координат БЧЭ с осями наклонно-поворотного стола обеспечивается только технологически, поскольку расположение осей БЧЭ относительно установочной поверхности наклонно-поворотного стола точно неизвестно. Это обуславливает увеличение погрешности определения неортогональности осей чувствительности ТЛГ в составе БЧЭ;
- в выражении (2) при определении «уточняющей» матрицы Т используют компоненты вектора конечного поворота в трехгранниках осей чувствительности ТЛГ (λl, λ2, λ3), рассчитанные с использованием масштабных коэффициентов, определенных исходя из предположения о строгой ортогональностью осей чувствительности. Это увеличивает погрешность определения «уточняющей» матрицы Т и, тем самым, погрешности определения неортогональности осей чувствительности гироскопа в составе БЧЭ;
- для расчета элементов симметрической матрицы S, соответствующей «отклонениям» (неортогональности) осей чувствительности ТЛГ относительно осей приборной системы координат БЧЭ, необходим сложный вычислительный алгоритм, который может вызвать увеличение погрешности.
Решаемой технической проблемой является повышение точности калибровки (паспортизации) бесплатформенных инерциальных навигационных систем, построенных на основе ТЛГ, или их составных частей.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение точности определения неортогональности осей чувствительности ТЛГ.
Данный технический результат достигается тем, что в способе определения неортогональности осей чувствительности ТЛГ, заключающемся в том, что гироскоп устанавливают на планшайбу наклонно-поворотного стола (НПС), выполняют повороты ТЛГ на фиксированные углы относительно осей наклонно-поворотного стола, с выхода гироскопа регистрируют количество информационных импульсов и знак приращения угла, по результатам регистрации выставляют две оси чувствительности ТЛГ ортогонально оси вращения планшайбы и вычисляют неортогональность осей чувствительности гироскопа, новым является следующее. Установку ТЛГ на планшайбу осуществляют в произвольном положении. После выставки соответствующих осей чувствительности гироскопа ортогонально оси вращения планшайбы, причем это положение осей характеризуется нулевыми проекциями приращений углов, измеряемых этими двумя осями чувствительности при последовательных поворотах планшайбы в противоположных направлениях (для компенсации вращения Земли). Затем планшайбу дополнительно наклоняют на угол  относительно исходного положения и последовательно поворачивают в противоположных направлениях (по и против часовой стрелки) на фиксированный угол, а величину неортогональности между соответствующими осями чувствительности вычисляют из соотношения:
относительно исходного положения и последовательно поворачивают в противоположных направлениях (по и против часовой стрелки) на фиксированный угол, а величину неортогональности между соответствующими осями чувствительности вычисляют из соотношения:

где Δху - величина неортогональности между соответствующими осями чувствительности лазерного гироскопа;
х, у - обозначение двух соответствующих осей чувствительности лазерного гироскопа, между которыми определяется неортогональность;
Kx, Ky - масштабные коэффициенты соответствующих осей чувствительности лазерного гироскопа;
Nx, Ny - полуразности между количеством информационных импульсов, зарегистрированных двумя соответствующими осями чувствительности лазерного гироскопа при последовательных поворотах планшайбы в противоположных направлениях на фиксированный угол ϕ.
Заявляемый способ обеспечивает однозначное определение неортогональности осей чувствительности ТЛГ, что позволяет упростить вычислительный алгоритм. За счет выставки двух (тестируемых) осей чувствительности ТЛГ ортогонально оси вращения планшайбы («нулевое» положение), которая характеризуется нулевыми проекциями приращений углов, измеряемых этими двумя осями чувствительности при поворотах планшайбы, уменьшается погрешность их ориентации, что повышает точность определения неортогональности между двумя (тестируемыми) осями после наклона планшайбы на угол  относительно исходного («нулевого») положения. Неортогональность других осей чувствительности гироскопа определяют аналогично, после выполнения процедуры выставки соответствующих осей чувствительности ТЛГ в «нулевое» положение.
относительно исходного («нулевого») положения. Неортогональность других осей чувствительности гироскопа определяют аналогично, после выполнения процедуры выставки соответствующих осей чувствительности ТЛГ в «нулевое» положение.
Заявляемый способ поясняется на примере ТЛГ моноблочной конструкции, симметричной относительно главной оси симметрии трехгранного угла, образованного осями чувствительности ТЛГ.
На фигуре схематично изображен трехосный НПС, содержащий планшайбу 1, среднюю раму 2, внешнюю раму 3. На фигуре введены следующие обозначения: ОХ - ось вращения средней рамы (ось наклонов планшайбы); OY - ось вращения планшайбы; OZ - ось вращения внешней рамы.
Данный НПС имеет следующие основные технические характеристики: погрешность позиционирования осей вращения - не более 1 угл.с, неортогональность смежных осей вращения - не более 2 угл.с.
Способ определения неортогональности осей чувствительности ТЛГ (с использованием НПС) реализуется следующим образом.
Устанавливают ТЛГ непосредственно на планшайбу 1. К точности установки гироскопа на планшайбе 1 требований не предъявляется. Задают начальную ориентацию осей вращения рам 2 и 3 из исходного состояния таким образом, чтобы они образовали правую прямоугольную систему координат (СК) OXYZ (см. фигуру), связанную с осями вращения НПС. Начало СК НПС (точка О) совмещено с точкой пересечения осей вращения рам 2 и 3. Ось ОХ совпадает с положительным направлением оси вращения средней рамы 2 (если смотреть из начала СК НПС, то по часовой стрелке). Ось OY совпадает с положительным направлением оси вращения планшайбы 1, наклоненной на угол минус  относительно оси ОХ. Ось OZ дополняет СК НПС до правой и совпадает с положительным направлением оси вращения внешней рамы 3.
относительно оси ОХ. Ось OZ дополняет СК НПС до правой и совпадает с положительным направлением оси вращения внешней рамы 3.
Затем выполняют процедуру выставки двух осей чувствительности ТЛГ в «нулевое» положение, которое подразумевает одновременную ортогональность двух осей чувствительности гироскопа оси вращения внешней рамы 3 и характеризуется нулевыми проекциями приращения углов, измеряемых этими двумя осями чувствительности, при повороте внешней рамы 3. Данная процедура может быть реализована (с заданной точностью δ) известным способом (Кузнецов Д.В., Парфенов А.Н., Фомин М.Р. Патент РФ 2599182, «Способ определения масштабных коэффициентов трехосного лазерного гироскопа», МПК G01C 19/00, опубликовано 10.10.2016 бюл. №28).
После окончания процедуры выставки (с заданной точностью δ) двух осей чувствительности ТЛГ ортогонально оси вращения внешней рамы 3, наклоняют планшайбу 1 из исходного положения на угол относительно оси ОХ (см. фигуру). Последовательно выполняют повороты планшайбы 1 в противоположных направлениях на угол ϕ относительно оси OZ. При этом фиксируют показания двух осей чувствительности, ранее выставляемых в «нулевое» положение, в импульсах:  и
и  Здесь знак «+» означает вращение относительно оси OZ против часовой стрелки, знак «-» - вращение по часовой стрелке. По зафиксированным показаниям в импульсах (после компенсации вращения Земли)
Здесь знак «+» означает вращение относительно оси OZ против часовой стрелки, знак «-» - вращение по часовой стрелке. По зафиксированным показаниям в импульсах (после компенсации вращения Земли)  и
и  рассчитывают величину неортогональности Δху, используя выражение (4). Аналогичные действия выполняют для определении неортогональности других осей чувствительности гироскопа.
рассчитывают величину неортогональности Δху, используя выражение (4). Аналогичные действия выполняют для определении неортогональности других осей чувствительности гироскопа.
Авторами разработана и экспериментально проверена методика определения неортогональности осей чувствительности ТЛГ заявляемым способом с применением трехосного НПС. При проверке использовали датчик угловых скоростей, построенный на базе ТЛГ. В качестве исходных данных задавали следующие параметры:
- величина угла поворота ϕ=1800° (при скорости вращения 100°/с);
- заданная точность выставки двух осей чувствительности ТЛГ в «нулевое» положение - δ≤2 угл. с.
Результаты испытаний показали работоспособность заявляемого способа и подтвердили достижение заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения систематических составляющих смещений нулей трехосного лазерного гироскопа | 2019 |
|
RU2708689C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ ТРЕХОСНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2599182C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2205367C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2611714C1 |
| Способ оценки систематических дрейфов трехосного лазерного гироскопа с виброподставкой | 2019 |
|
RU2748030C1 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
| Способ определения ориентации объекта в бесплатформенной инерциальной навигационной системе | 2022 |
|
RU2794283C1 |

Изобретение относится к области гироскопического приборостроения. Сущность изобретения заключается в том, что способ определения неортогональности осей чувствительности трехосного лазерного гироскопа (ТЛГ) содержит этапы, на которых установку ТЛГ на планшайбу осуществляют в произвольном положении. После выставки соответствующих осей чувствительности гироскопа ортогонально оси вращения планшайбы, причем это положение осей характеризуется нулевыми проекциями приращений углов, измеряемых этими двумя осями чувствительности при последовательных поворотах планшайбы в противоположных направлениях (для компенсации вращения Земли). Затем планшайбу дополнительно наклоняют на угол  относительно исходного положения и последовательно поворачивают в противоположных направлениях (по и против часовой стрелки) на фиксированный угол, а величину неортогональности между соответствующими осями чувствительности вычисляют из математического соотношения. Технический результат – повышение точности определения неортогональности осей чувствительности ТЛГ. 1 з.п. ф-лы, 1 ил.
относительно исходного положения и последовательно поворачивают в противоположных направлениях (по и против часовой стрелки) на фиксированный угол, а величину неортогональности между соответствующими осями чувствительности вычисляют из математического соотношения. Технический результат – повышение точности определения неортогональности осей чувствительности ТЛГ. 1 з.п. ф-лы, 1 ил.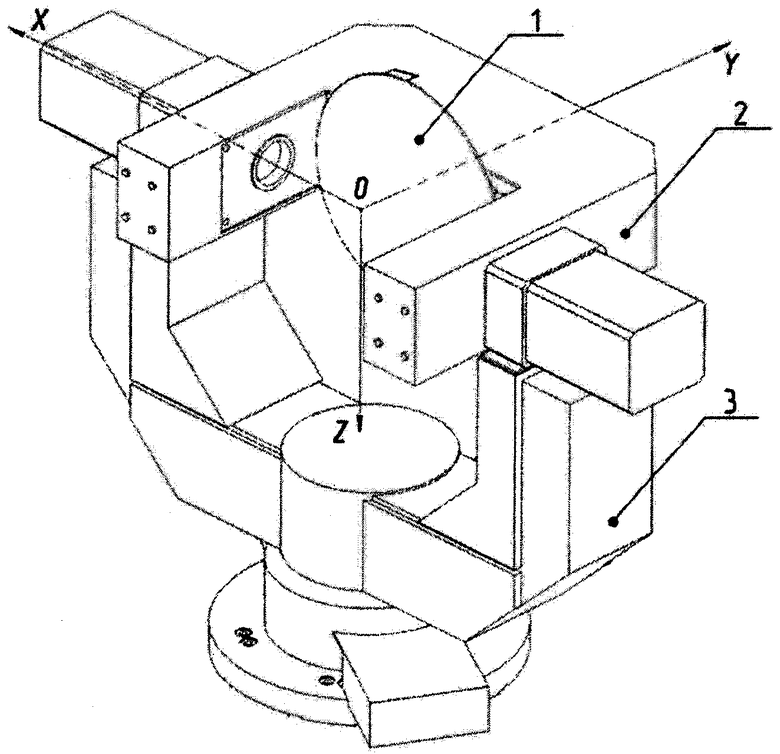
1. Способ определения неортогональности осей чувствительности трехосного лазерного гироскопа, заключающийся в том, что трехосный лазерный гироскоп устанавливают на планшайбу наклонно-поворотного стола, выполняют повороты трехосного лазерного гироскопа на фиксированные углы относительно осей наклонно-поворотного стола, с выхода трехосного лазерного гироскопа регистрируют количество информационных импульсов и знак приращения угла, по результатам регистрации выставляют две оси чувствительности трехосного лазерного гироскопа ортогонально оси вращения планшайбы и вычисляют неортогональность осей чувствительности трехосного лазерного гироскопа, отличающийся тем, что установку трехосного лазерного гироскопа на планшайбу осуществляют в произвольном положении, после выставки соответствующих осей чувствительности трехосного лазерного гироскопа ортогонально оси вращения планшайбы ее дополнительно наклоняют на угол  относительно исходного положения и последовательно поворачивают в противоположных направлениях на фиксированный угол, а величину неортогональности между соответствующими осями чувствительности вычисляют из соотношения:
относительно исходного положения и последовательно поворачивают в противоположных направлениях на фиксированный угол, а величину неортогональности между соответствующими осями чувствительности вычисляют из соотношения:

где Δху - величина неортогональности между соответствующими осями чувствительности трехосного лазерного гироскопа;
х, у - обозначение двух соответствующих осей чувствительности трехосного лазерного гироскопа, между которыми определяется неортогональность;
Kx, Ky - масштабные коэффициенты соответствующих осей чувствительности трехосного лазерного гироскопа;
Nx, Ny - полуразности между количеством информационных импульсов, зарегистрированных двумя соответствующими осями чувствительности трехосного лазерного гироскопа при последовательных поворотах планшайбы в противоположных направлениях на фиксированный угол ϕ.
2. Способ определения неортогональности осей чувствительности трехосного лазерного гироскопа по п. 1, отличающийся тем, что выставку двух осей чувствительности трехосного лазерного гироскопа ортогонально оси вращения планшайбы осуществляют последовательными приближениями таким образом, чтобы проекции приращений углов, измеряемых этими двумя осями чувствительности, при последовательных поворотах планшайбы в противоположных направлениях были минимальными.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ ТРЕХОСНОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2599182C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2611714C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ КАЛИБРОВКИ ТРЕХОСНЫХ ЛАЗЕРНЫХ ГИРОСКОПОВ С ОДНИМ ОБЩИМ ВИБРАТОРОМ | 2011 |
|
RU2488776C1 |
| CN 105241478 A, 13.01.2016. | |||

