Данное изобретение относится к области автоматики и может быть использовано при создании систем автоматического управления (САУ) изделиями и объектами ракетно-космической техники (РКТ) и робототехнических комплексов (РТК), работающих в экстремальных внешних условиях, а также в импульсных и стационарных полях ионизирующего излучения.
Навигация по звездам и планетам (включая Солнце и Луну) известна с давних времен. Ее широко использовали рыбаки, штурманы и капитаны судов дальнего плавания. Для навигации использовали два основных прибора: хронометр и секстан, позволяющие по видимым угловым координатам навигационной звезды, зная точное время и зафиксировав тем или иным образом плоскость местного горизонта, определить посредством секстана координаты судна в геоцентрической системе координат (См., например, «а_aleske@mail.ru» и Н.А. Рынин «Астронавигация» изд. АН ССР, Ленинград, 1932). Этот метод оставался практически единственным в кораблевождении и ориентации на местности до появления систем спутниковой навигации, имеющих более высокую точность и независимость от метеоусловий местности, хотя требующих наличия определенного числа (не менее 4) навигационных спутников в зоне радиовидимости и соответствующих приемников у потребителя. В то же время, астронавигация по звездам не утратила своего значения в силу ее относительной простоты и доступности массовому потребителю (См., например, книгу Брюховец В.В. «Компьютерная астронавигация», Севастополь, изд. РИБЭСТ, 2011). Важным достоинством описанных в этой книге методов астронавигации является введение ориентации по двум навигационным звездам, что заметно повышает достоверность и точность определения координат. Однако при использовании этого метода в системах автоматического управления (САУ) изделиями ракетно-космической техники РКТ и мобильными робототехническими комплексами (РТК), как гражданского, так и оборонного назначения необходимо обеспечить условия визирования двух светил, что требует проведения маневрирования объектами РКТ и РТК.
Маневр не всегда возможен при решении изделием (объектом) основной задачи. Особенно затруднительно обеспечить визирование одной или двух навигационных звезд для систем, работающих в экстремальных условиях и полях ионизирующего излучения, работа в которых систем спутниковой навигации затруднительна, а в большинстве случаев и невозможна, особенно при применении к САУ активного противодействия в виде мощных импульсов электромагнитного и ионизирующего излучения. Все известные методы и устройства измерения в виде секстанов и более совершенных приборов - теодолитов со встроенными средствами привязки к местной вертикали и цифровой обработкой замеров встроенными микропроцессорными устройствами требуют профессиональной работы оператора по выбору навигационной звезды и начального «прицеливания» на нее оси оптического визира, что приводит к возможным ошибкам в выборе навигационной звезды (звезд). Предпочтительным является ориентация не по отдельным звездам, а по видимым созвездиям без дополнительных маневров объекта и участия оператора в «прицеливании» визира на выбранные светила. Однако, это требует введения в устройства астронавигации совершенных средств инерциальной навигации, наличия каталога видимых созвездий в зоне работы объекта и совершенных высокопроизводительных вычислительных средств для опознавания созвездия и получения угловых координат ориентации объекта, относительно его инерциальной системы координат. При переходе к визированию созвездии астроориентация может использоваться в указанных САУ изделиями РКТ и РТК, хотя для обеспечения работоспособности в экстремальных условиях и полях ионизирующего излучения, вызванных излучением космического пространства, фоном загрязненной местности, вспышками на Солнце, авариями ядерно-энергетических установок (ЯЭУ) и направленным противодействием, навигация по созвездиям требует создания специальной аппаратуры, существенно отличающейся от существующих средств астронавигации на основе оптоэлектронных устройств (ОЭУ). Экстремальность условий определяют широкий диапазон изменения температуры окружающей среды от -60 до +125 градусов по Цельсию, а ионизирующие и электромагнитные воздействия обусловлены космическим излучением, вспышками на Солнце, авариями на ядерно-энергетических установках, фоном загрязненной местности и направленным противодействием. Известен ряд технических решений направленных на получение и обработку оптической информации.
Из них можно отметить патенты США:
1. 5539578, G09G 03/02
2. 5539422, G09G 03/02
3. 5684498, G02B 27/10
4. 5596339, G09G 03/03
5. 5557444, G02B 27/10
Однако, эти решения относятся к стационарным системам обработки и отображения информации и не могут использоваться в составе САУ, так как предназначены исключительно для работы в нормальных климатических условиях и, более того, только в помещениях с кондиционированием, а также абсолютно неработоспособны в экстремальных условиях и полях ионизирующего излучения.
Известен также отечественный патент RU №2145110, G02B 27/00 «Устройство для определения угловых элементов внешнего ориентирования линии визирования съемочной аппаратуры» (авторы Петрищев В.Ф., Солунин B.C. и Стрельников Г.И, патентообладатель - ЦСКБ «Прогресс»).
Данное устройство формирует визуальную сферическую поверхность, на которую переносятся точечные изображения. Несомненным достоинством этого устройства являются его малые габариты и небольшое энергопотребление, позволяющие оператору использовать его без каких-либо сложных механизированных средств транспортирования. Однако, это устройство не позволяет определить плоскость местного горизонта и видимые координаты навигационной звезды относительно этой плоскости, и совершенно неработоспособно в экстремальных условиях и полях ионизирующего излучения.
Эти известные решения могут использоваться только для формирования изображения визируемых объектов и могут быть полезны, например, при разработке постов автоматизированного управления космическим аппаратом (КА) при решении задачи ориентации аппарата экипажем, но не решают задачи автоматической ориентации космического аппарата и объектами РКТ в пространстве и совершенно не способны работать в экстремальных условиях и полях ионизирующего излучения.
Более полно задача автоматической ориентации КА с помощью оптических средств решена в изобретении «Мобильный наземный специализированный комплекс приема и обработки изображений» (См. патент RU №2460136 С2 G06T 1/00, G04B 7/26).
Данный комплекс получает по радиоканалу информацию с оптических средств КА, решая задачу опознавания образов с использованием карт местности, производит вычисление текущих координат КА и передает эти данные по радиоканалу на борт КА. Задача определения параметров движения КА в этом комплексе решается автоматически, однако, наличие передачи данных из КА в наземный комплекс и обратно по радиоканалу вызывает существенную задержку в выработке команд управления ориентацией КА, что для ряда КА приводит к ошибкам в управлении КА, а для ряда изделий РКТ, и в частности ракет-носителей, запаздывание просто недопустимо. Наличие интенсивного обмена по радиотракту является слабым местом таких реализаций, так как помимо большого запаздывания в формировании управляющей информации аппаратура радиоканала не обладает требуемой надежностью при работе в экстремальных условиях и тем более при воздействии мощных импульсных электромагнитных и ионизирующих излучений космического пространства, вызванных вспышками на Солнце, авариями ЯЭУ различных КА и направленным противодействием.
Известно также решение по обработке оптической информации «Устройство, способ и программа обработки изображений» (См. патент RU №2469403). Данное решение предполагает:
1. Наличие средства определения степени размытости изображения.
2. Наличие средства выбора операций по обработке изображения.
3. Наличие самих средств обработки, устанавливаемых по выбору оператора.
4. Наличие программ обработки, переносимых в ЭВМ с внешнего носителя оператором.
Данное решение позволяет, при использовании его для решения задач астронавигации, достаточно точно определить центр навигационного светила при навигации по отдельным звездам, но не позволяет определить координаты навигационного светила относительно плоскости местного горизонта, поскольку не предполагает наличия средств определения этой плоскости. Кроме того, задача не решается автоматически, а требует работы оператора и наличия внешних носителей программной информации, загружаемой в компьютер после выбора оператором средства обработки изображения.
Загрузка программного обеспечения в ЭВМ и тем более работа оператора совершенно недопустимы в САУ изделиями РКТ и РТК, работающими в экстремальных условиях и полях ионизирующего излучения.
Наиболее полно задача обработки и отображения объектов наблюдения решена автором Ковалевым А.М. в патенте «Способ и устройство отображения пространственных объектов» (См. патент RU №2143718 С1, G02B 27/22, G09G 3/02, заявитель: Институт автоматики и электрометрии СО РАН). Предлагаемое устройство для реализации обработки и отображения объектов содержит последовательно включенные контроллер, оптические линзы, вертикальный и горизонтальный сканеры, входы синхронизации которых подключены к выходам контроллера, подключенного к ЭВМ общего назначения. Это решение может быть принято за прототип. Важным положительным свойством прототипа является использование для синхронизации сканеров цифрового специализированного контроллера, связанного с ЭВМ верхнего уровня, из которой поступает исходная информация для задания параметров визирования и в которую может направляться информация, полученная от сканеров для дальнейшей обработки.
Недостатком прототипа является то, что функции контроллера ограничены только синхронизацией сканеров, и он не участвует в предварительной (внутрикадровой) обработке, полученной от сканеров информации, а вся обработка, как внутрикадровая, так и межкадровая, возложены на ЭВМ, что при работе в реальном времени требует организации высокоскоростных каналов обмена между первичными источниками полученного изображения (сканерами) и ЭВМ, а также очень высокой производительности ЭВМ, которая не может быть достигнута в современных ЭВМ общего назначения с типовой архитектурой, особенно, если она Неймановского типа, как в большинстве известных ЭВМ. В прототипе отсутствуют также средства привязки координат осей визирования сканеров к плоскости местного горизонта и угловым координатам осей визирования. Кроме того, предлагаемое в качестве прототипа устройство помимо проблем с работой в реальном времени совершенно неработоспособно в экстремальных условиях и полях ионизирующего излучения, что не позволяет использовать устройство для получения информации от навигационных звезд при работе в составе САУ изделиями РКТ и РТК.
Для решения задачи получения информации о координатах навигационных светил и уточнения по ним координат объекта управления с обеспечением работы в экстремальных условиях и полях ионизирующего излучения в составе САУ РКТ и РТК предлагается Система астронавигации, далее просто система.
Предлагаемая система, помимо наличия обрабатывающей бортовой ЭВМ, называемой в САУ изделиями РКТ и РТК бортовой цифровой вычислительной машиной (БЦВМ), предполагает начальную привязку осей ОЭУ, визирующего навигационные светила к базовым осям объекта управления по информации, введенной в ее состав бесплатформенной инерциальной навигационной подсистемы (БИНПС), а для управления угловыми координатами оптической оси ОЭУ(телескоп или два телескопа, которые размещены в кардановом подвесе, имеющем три степени свободы), в систему введены исполнительные устройства (ИО) электромеханического типа, с двигателями постоянного тока и датчиками обратной связи (датчиками угла отклонения по одной из координат трехмерного пространства) резисторного типа или датчиками на основе эффекта Холла. ОЭУ содержит в свою очередь один или два оптических телескопа с установленными в их фокусе, перпендикулярно оптической оси телескопа, оптическими матрицами на базе приборов с зарядовой связью (ПЗС - матрица), преобразующими оптический сигнал телескопа в электрический заряд элемента (пикселя) матрицы. Считывая заряд из фиксированных адресов пикселей, определяют пространственные координаты световых пятен, каждое из которых соответствует одной из звезд созвездия. Для управления ИО служит БЦВМ, а для обработки считанной с матриц информации в систему введено многопроцессорное специализированное вычислительное устройство (СВУ) обработки изображений (СВУОИ), реализованное по принципу «общий поток команд - разные данные», которое обеспечивает опознавание созвездия путем попарного сравнения углового расстояния зафиксированных матрицей светил с эталонными изображениями созвездий, хранящихся в памяти БЦВМ в виде каталога информации о взаимном угловом расстоянии отдельных звезд созвездий, которые могут оказаться в поле зрения ОЭУ, при работе объекта в заданном районе(полете по заданной траектории). Причем для повышения точности и достоверности ОЭУ содержит два телескопа с оптическими осями, расположенными под некоторым углом друг к другу. В большинстве случаев этот угол равен π/2.
СВУОИ подключено к БЦВМ, которая помимо задач астронавигации решает задачу выработки командных данных для ИО и исходной информации для СВУОИ.
Для обеспечения работы всех устройств в систему введена собственная подсистема электропитания (ПЭП). Для повышения точности работы ОЭС, путем коррекции ее ошибок предлагаемая система содержит периферийную аппаратуру спутниковой навигации (АСН), подключенную к БЦВМ, в которую для обеспечения устойчивости к импульсным электромагнитным и ионизирующим излучениям введено запоминающее устройство с санкционированным доступом (ЗУСД), а для определения точного времени в БЦВМ введен высокостабильный таймер (хронометр).
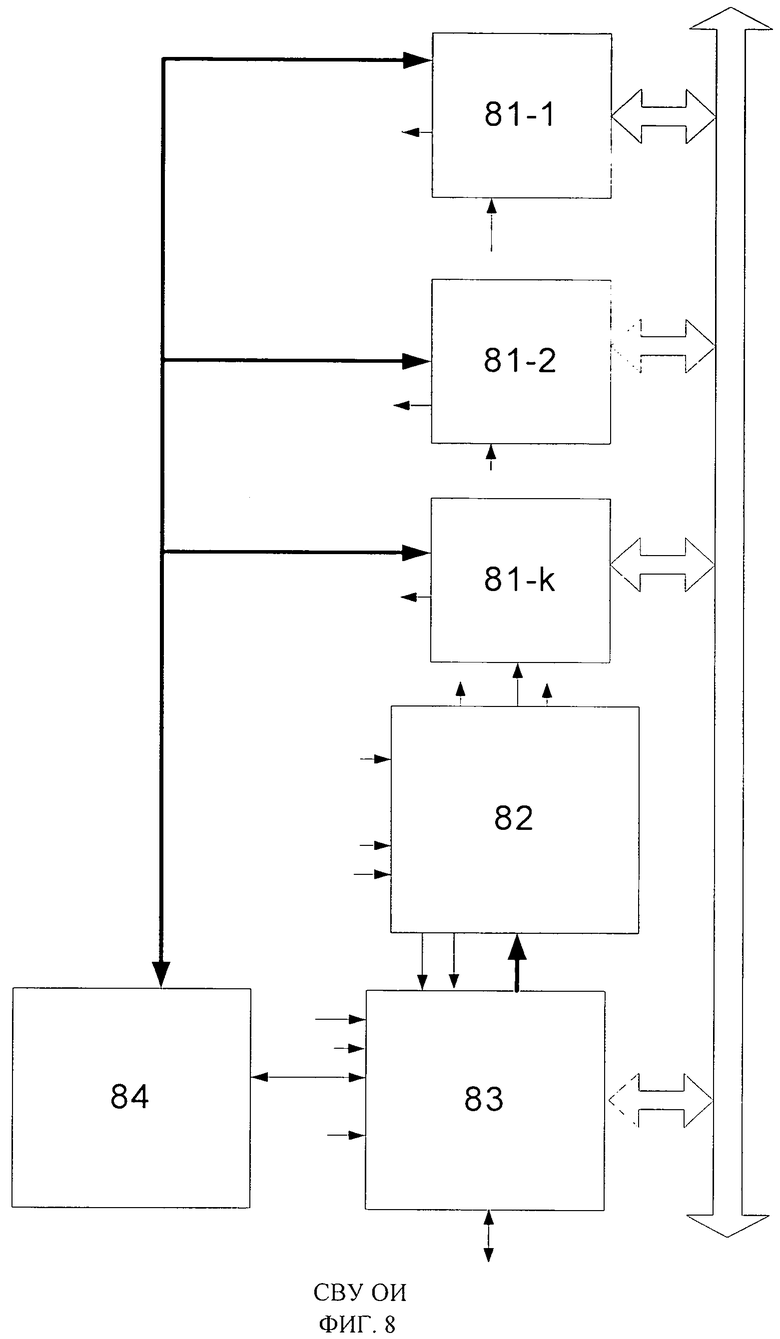
СВУОИ содержит управляющий микропроцессор, вход - выход которого является входом - выходом ОЭС, подключенным к БЦВМ, а его входы - выходы подключены к входам - выходам ПЗС матрицы. Через первую магистраль к управляющему микропроцессору подключены к вычислительных микропроцессоров, подключенных через вторую магистраль к обрабатывающему запоминающему устройству, которое через двунаправленную связь подключено к управляющему микропроцессору, установочный выход которого подключен к установочному входу обрабатывающего блока микропрограммного управления, выходы которого подключены к управляющим входам всех микропроцессоров и обрабатывающего запоминающего устройства.
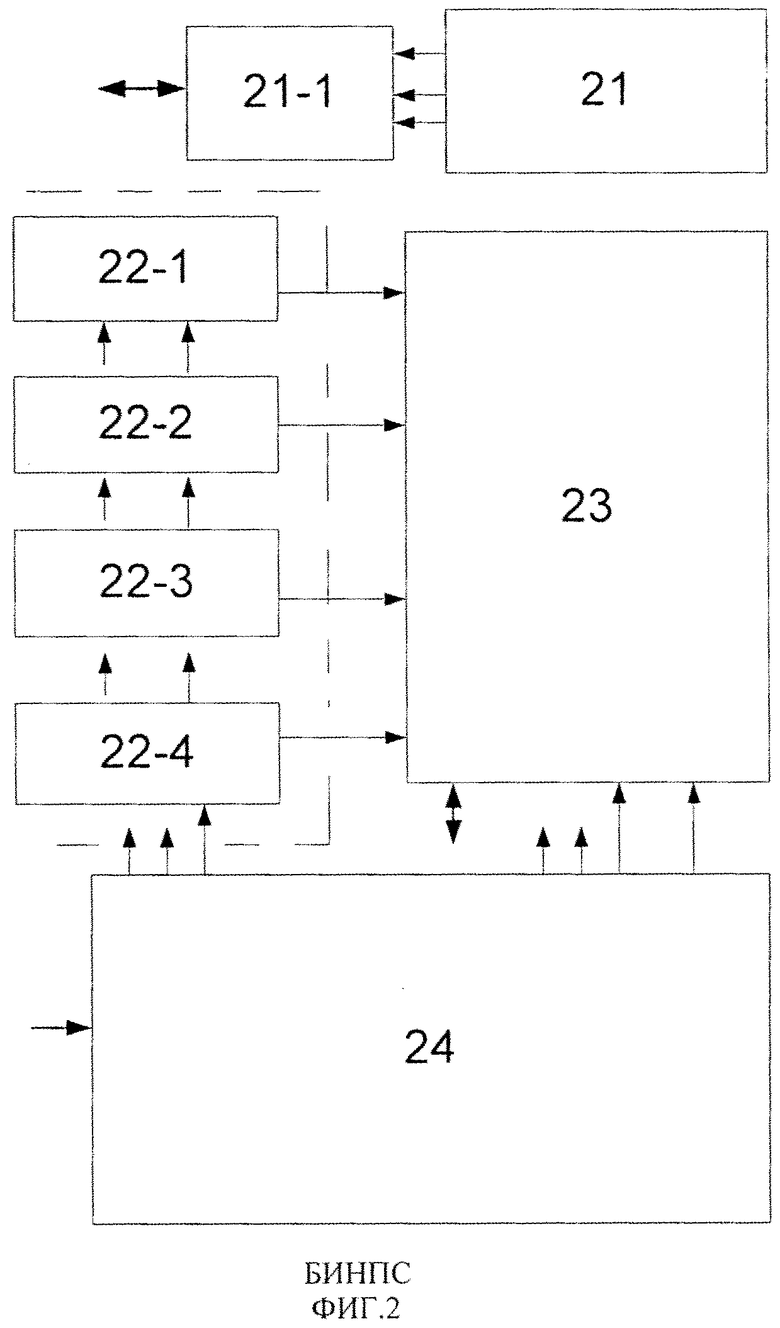
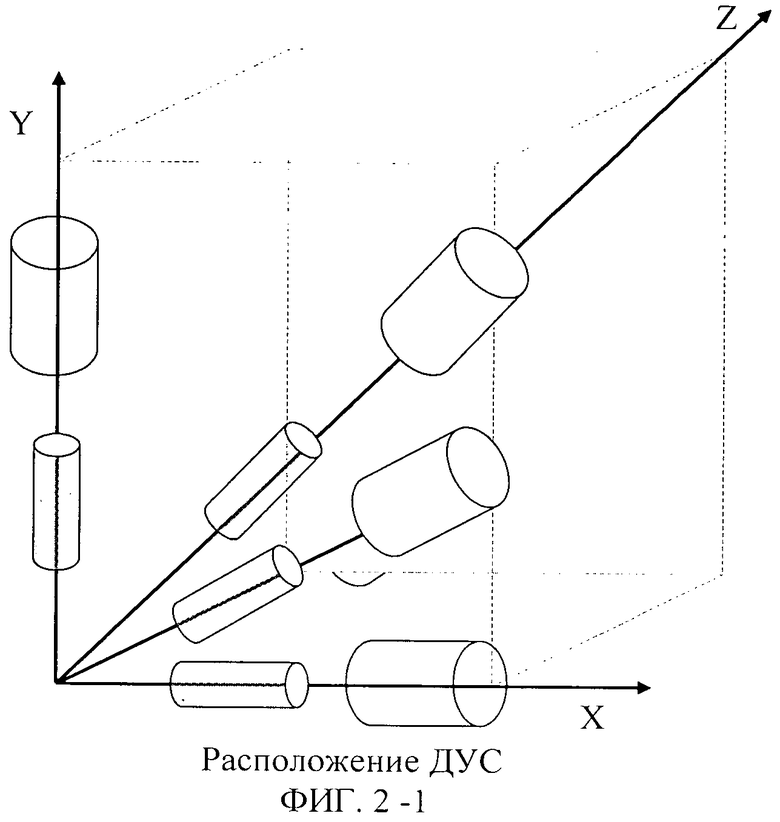
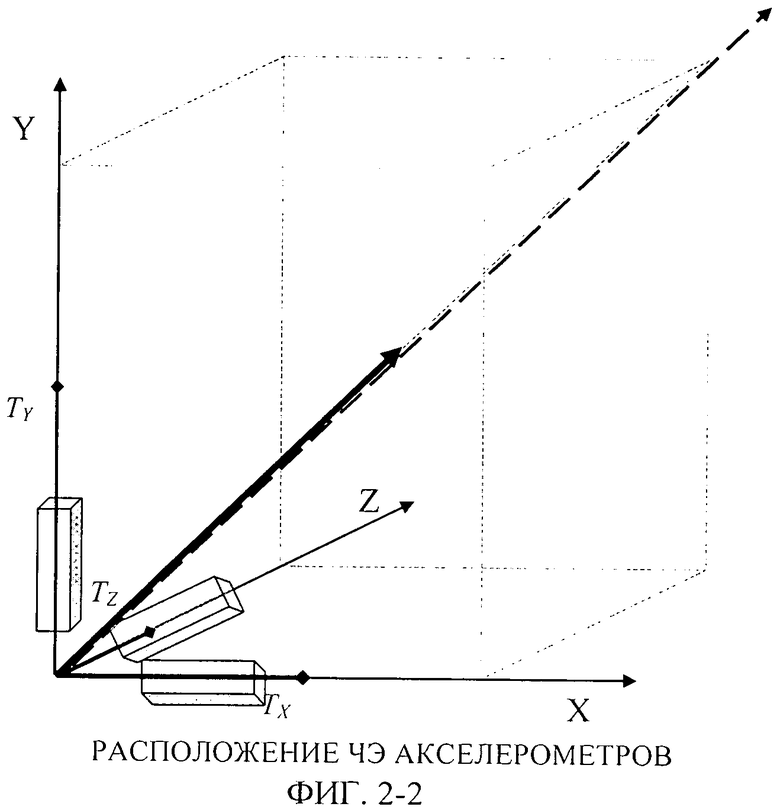
БИНПС содержит блок акселерометров, включающий три акселерометра, оси которых распложены по трем, исходящим из одной вершины, смежным граням условного куба, диагональ которого, исходящая из той же вершины, совпадает с основной конструктивной осью аппарата или объекта управления. Выходы всех акселерометров подключены к входам СВУ акселерометров (СВУАК), вход-выход которого является входом-выходом подсистемы, подключенным через мультиплексную магистраль к БЦВМ. Кроме того, эта подсистема содержит также четыре датчика угловой скорости (ДУС), оси чувствительности трех из которых расположены по трем, исходящим из одной вершины, смежным граням условного куба, а ось чувствительности четвертого совпадает с диагональю этого куба. Кроме того эта подсистема содержит блок микропрограммного управления подсистемы БМУ БИНПС со встроенным синхронизатором (установочный вход которого является установочным входом подсистемы, а выходы блока подключены к управляющим и синхронизирующим входам остальных компонентов подсистемы).
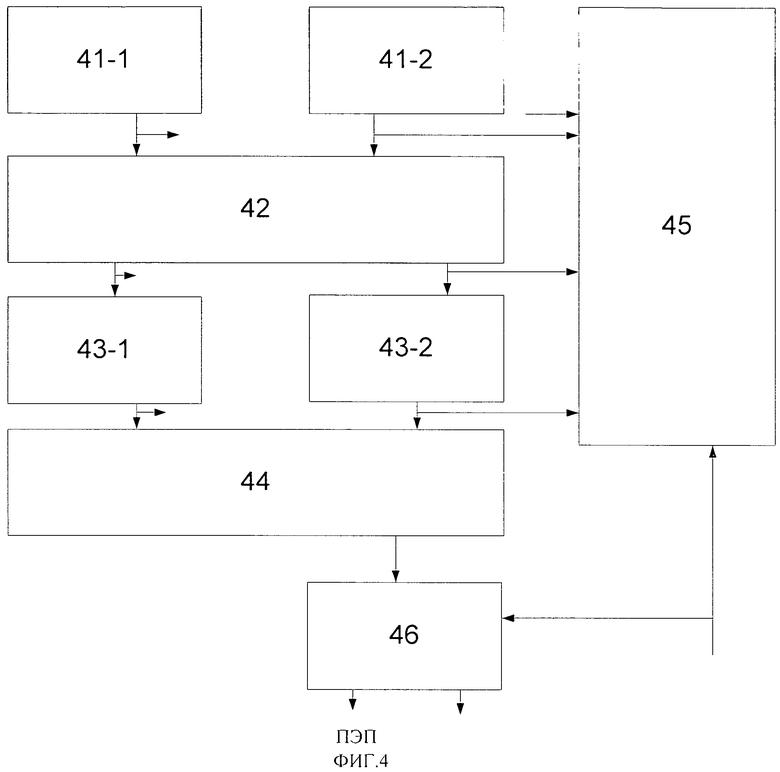
ПЭП содержит первый и второй первичные источники энергии(например, солнечные батареи), выходы которых подключены к первой группе входов блока контроля и управления (БКУ) и входам первого коммутатора, выходы которого подключены к входам первого и второго аккумуляторов, подключенных выходами ко второй группе входов БКУ и входам второго коммутатора, выход которого подключен к силовому входу источника вторичного электропитания (ИВЭП), установочный вход которого подключен к выходу БЦВМ, а синхронизирующие выходы и выходы постоянного и импульсного питания ИВЭП подключены к соответствующим входам остальных компонентов системы.
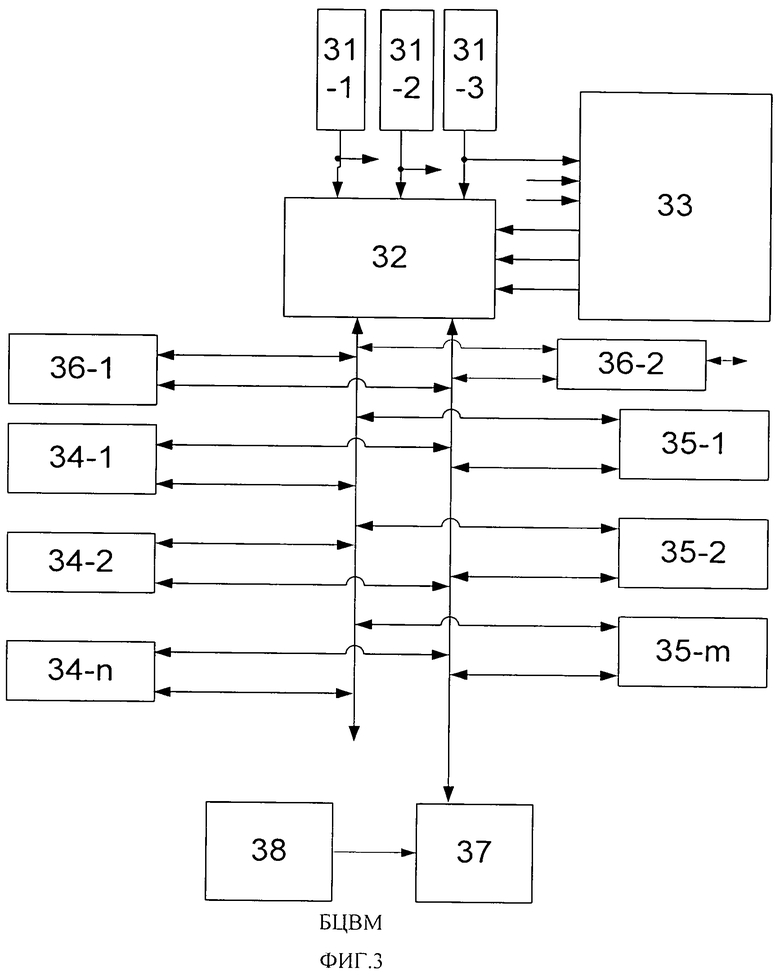
БЦВМ содержит первый, второй и третий управляющие процессоры (три канала), выход каждого из которых подключен к входам блока контроля (БК) и входам переключателя каналов (ПК), управляющие входы которого подключены к выходам БК, а выход ПК является установочным выходом БЦВМ. Кроме того к двум входам-выходам ПК подключены шины дублированной магистрали. К этой магистрали подключены таймер, модуль обработки информации АСН и запоминающее устройство санкционированного доступа (ЗУСД), к блокирующему входу которого подключен выход датчика внешнего воздействия(ДВВ) импульсного электромагнитного или ионизирующего излучений. Кроме того, к дублированной магистрали подключено n вычислительных модулей и m модулей связи, входы-выходы которых являются входами-выходами магистральных мультиплексных линий связи, к которым подключены БИНПС и АСН.
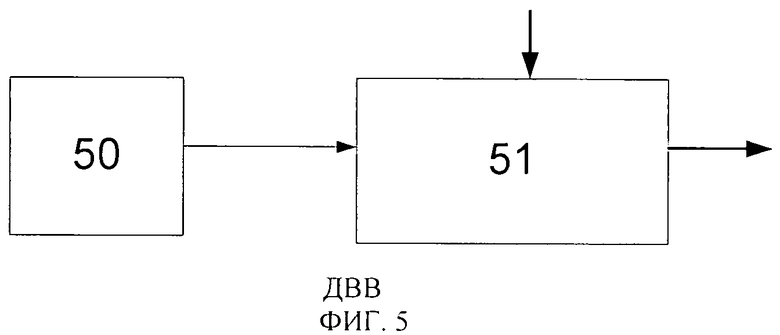
ДВВ содержит чувствительный элемент датчика (ЧЭ), подключенный выходом к формирователю сигнала (ФС), выход которого является блокирующим выходом ДВВ, подключенным к ЗУСД.
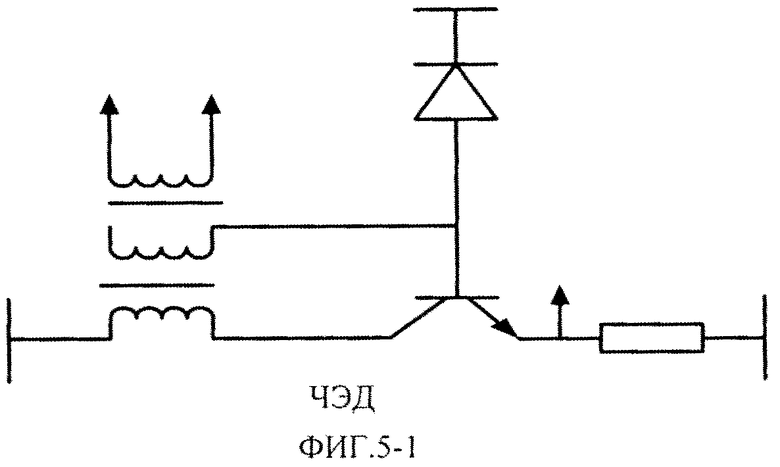
ЧЭ реализован как блокинг-генератор, к базе транзистора которого подключен обратпосмещеиный диод.
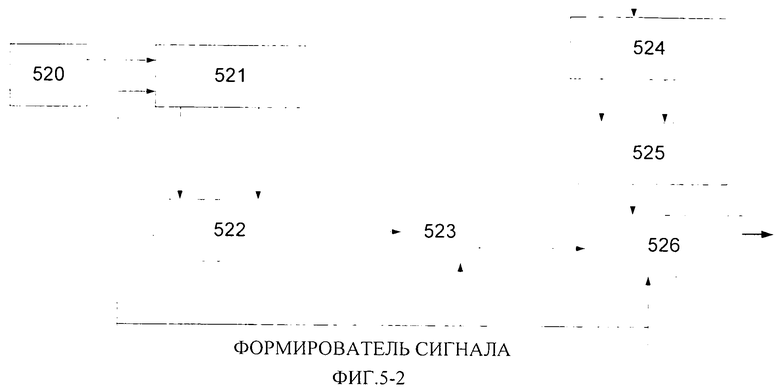
ФС содержит кварцевый задающий генератор, подключенный выходом к счетному входу интервального счетчика, подключенного через интервальный дешифратор к сбрасывающему входу триггера блокировки, запускающий вход которого объединен с запускающим входом интервального счетчика и входом логического устройства, выход которого является блокирующим выходом формирователя, а кодовый вход этого устройства подключен к выходу кодового дешифратора, подключенного входами к выходам регистра санкционированного кода, вход которого является кодовым входом формирователя и датчика внешнего воздействия и подключен к установочному выходу БЦВМ.
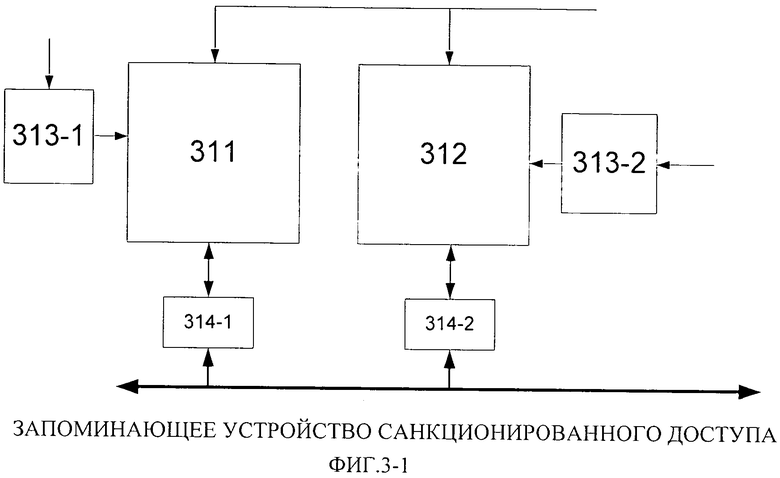
ЗУСД содержит первый и второй накопители, каждый из которых через свою, соответственно первую и вторую, временную двунаправленную связь подключен к выходу первого и второго сумматора времени, вход каждого из которых является входом метки времени ЗУСД, а через первую и вторую массивную двунаправленные связи каждый из накопителей подключен к входу-выходу, соответственно первого и второго, сумматоров массивов, второй вход-выход каждого из которых подключен к магистральной шине - шипе БЦВМ.
Накопитель содержит энергонезависимый элемент памяти, параллельно шипам записи которого включен полевой транзистор со встроенным каналом, к затвору которого подключен блокирующий вход накопителя.
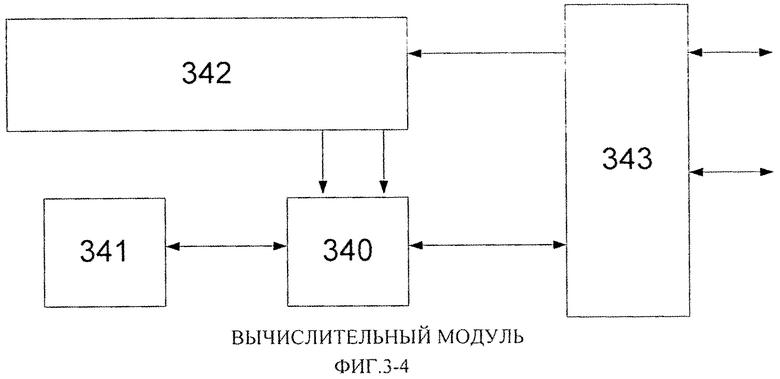
ВМ содержит блок процессора с подключенным к нему через первую двунаправленную связь блоком запоминающего устройства и подключенным через вторую двунаправленную связь блоком связи по магистрали, два входа-выхода которого являются входами-выходами блока, подключенными к магистрали, а управляющий выход этого блока подключен к входу блока синхронизации, выходы которого подключены к синхровходам процессора.
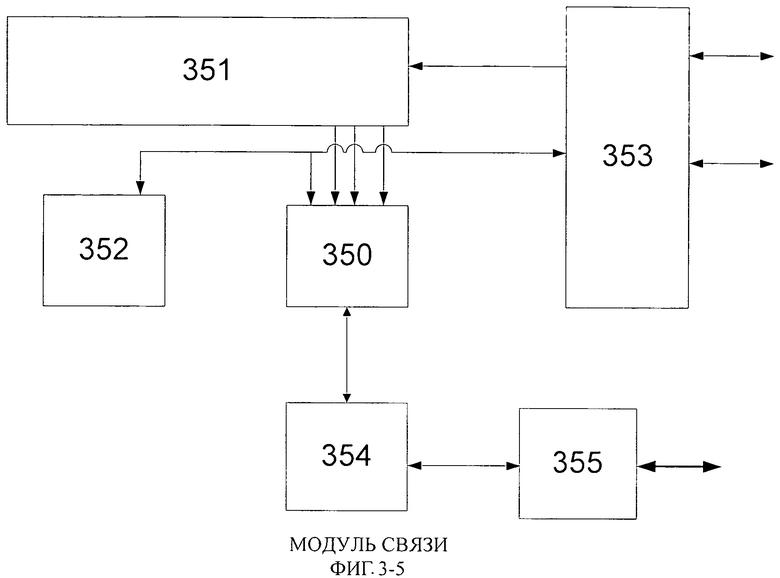
МС содержит процессор с подключенными к нему через внутреннюю магистраль запоминающим устройством и устройством связи по магистрали, два входа-выхода которого являются входами-выходами модуля, подключенными к магистрали. Выход устройства связи подключен к входу устройства синхронизации, выходы которого подключены к синхровходам процессора, который по двунаправленной связи через кодирующе-декодирующее устройство подключен к приемопередатчику мультиплексной магистрали с периферийными устройствами.
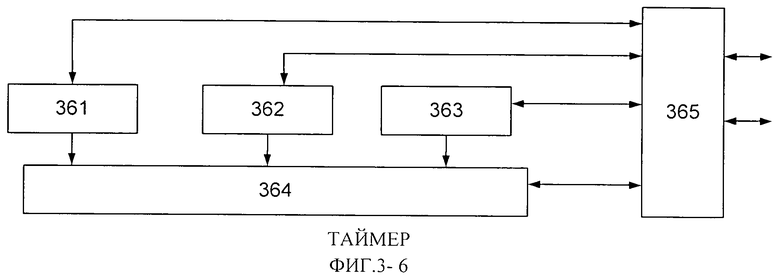
Таймер содержит первый и второй таймерные счетчики и контрольный счетчик, выходы которых подключены к таймерной схеме контроля. При этом первый и второй таймерные счетчики и контрольный счетчики, а также таймерная схема контроля подключены соответственно через первую, вторую, контрольную и схемную двунаправленные линии связи к таймерному устройству связи по магистрали, два входа-выхода которой являются входами-выходами таймера, подключенными к магистрали.
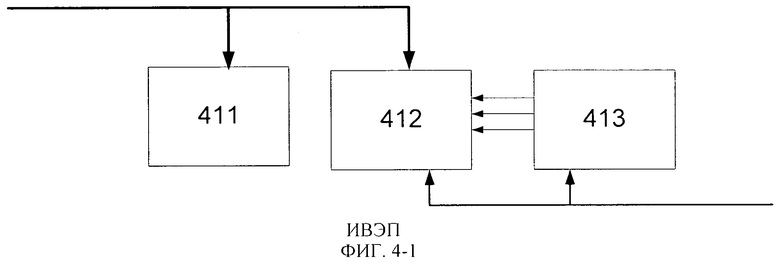
ИВЭП содержит модуль постоянного питания (МПП) и модуль импульсного питания (МИП), силовые входы которых являются силовым входом источника, а его установочный вход источника является установочным входом МПП и формирователя синхроимпульсов (ФСИ), три управляющих выхода которого подключены к управляющим входам МИЛ, а выходы постоянного питания МПП, импульсного питания МИП и выходы метки времени, и синхроимпульсов ФСИ являются соответственно выходами постоянного и импульсного питания, метки времени и синхроимпульсов ИВЭП.
МПП содержит три идентичных конвертора (три канала), силовой и установочный вход каждого из которых является одноименным входом модуля и ИВЭП. Выходы конверторов подключены к контрольным входам блока управления и контроля (БУК), к частотным входам которого подключены частотные выходы конверторов. Кроме того выходы конверторов подключены к контрольным входам БУК и через блок отключения (БО) подключены к входам блока выравнивания (БВ), выход которого является выходом МПП и выходом постоянного питания ИВЭП и подключен к дополнительному контрольному входу БУК, выходы которого подключены к управляющим входам БО.
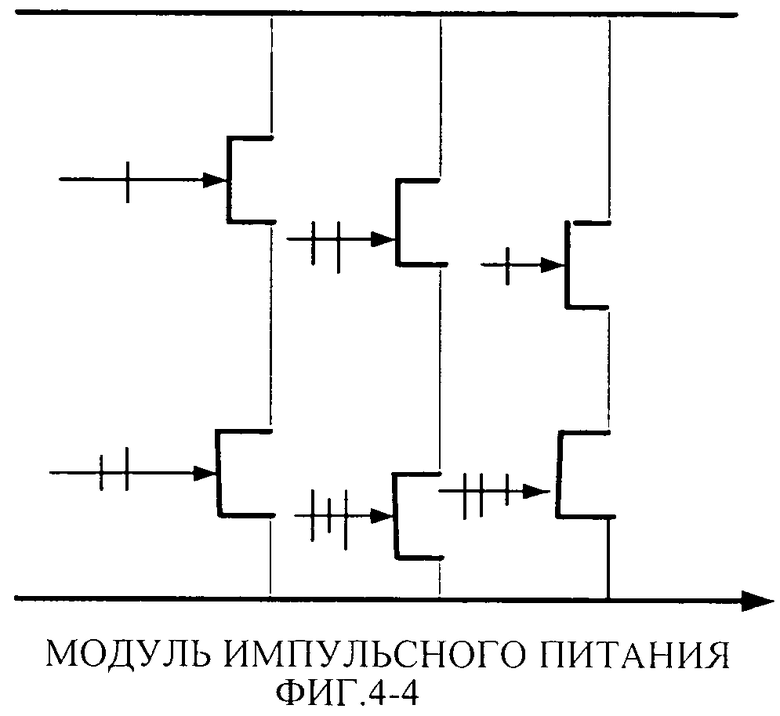
МИП содержит три идентичные ветви, объединенные с каждой из сторон. Одна из сторон является силовым входом, вторая - выходом. В каждой ветви установлены два последовательно соединенных полевых транзистора, а три входных управляющих сигнала разведены таким образом, что каждый из них подключен к затворам двух транзисторов, установленных в разных ветвях. Такая разводка управляющих сигналов образунт выборку «2 из 3» в силовых ветвях и позволят нейтрализовать одиночный отказ в модуле.
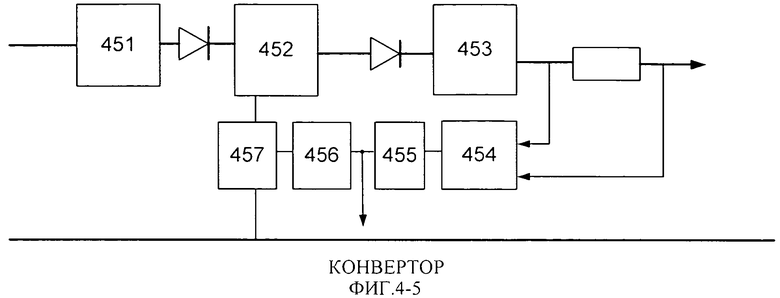
Конвертор содержит последовательно включенные фильтр, вход которого, является силовым входом конвертора, трансформатор с включенным в первичную обмотку транзистором-прерывателем, выпрямляющий диод во вторичной обмотке и выходной фильтр, выход которого является выходом конвертора и подключен к входу преобразователя напряжения в частоту. Выход этого преобразователя подключен к входу элемента развязки, выход которого является частотным выходом конвертора и подключен к входу частотно-импульсного модулятора (ЧИМ), установочный вход которого является установочным входом конвертора, а выход подключен к базе транзистора-прерывателя.
БУК содержит первый, второй, третий и четвертый частотные счетчики. Входы первых трех являются частотными входами блока, подключенными соответственно к частотным выходам первого, второго и третьего конверторов. Вход четвертого счетчика подключен к выходу контрольной схемы преобразования напряжения в частоту, входы которой являются контрольными и дополнительным контрольным входом блока, подключенным к выходам МПП. Выход первого счетчика подключен к первым входам первого и третьего сумматоров. Выход второго счетчика подключен ко вторым входам первого и третьего сумматоров и первым входам второго сумматора, а выход третьего счетчика подключен ко вторым входам третьего и второго сумматоров. Выход четвертого счетчика подключен к первому входу четвертого сумматора, ко второму входу которого подключен выход регистра кода, подключенный ко вторым входам первого, второго, третьего и четвертого устройств сравнения. Вход регистра кода объединен с входом регистра допуска, выходы которого подключены к первым входам первого, второго, третьего и четвертого устройств сравнения. К выходам этих устройств подключены входы соответствующих им первого, второго, третьего, четвертого и контрольных триггеров неисправности, выходы которых подключены к входам логического устройства, выходы которого являются выходами блока, подключенными к управляющим входам блока отключения.
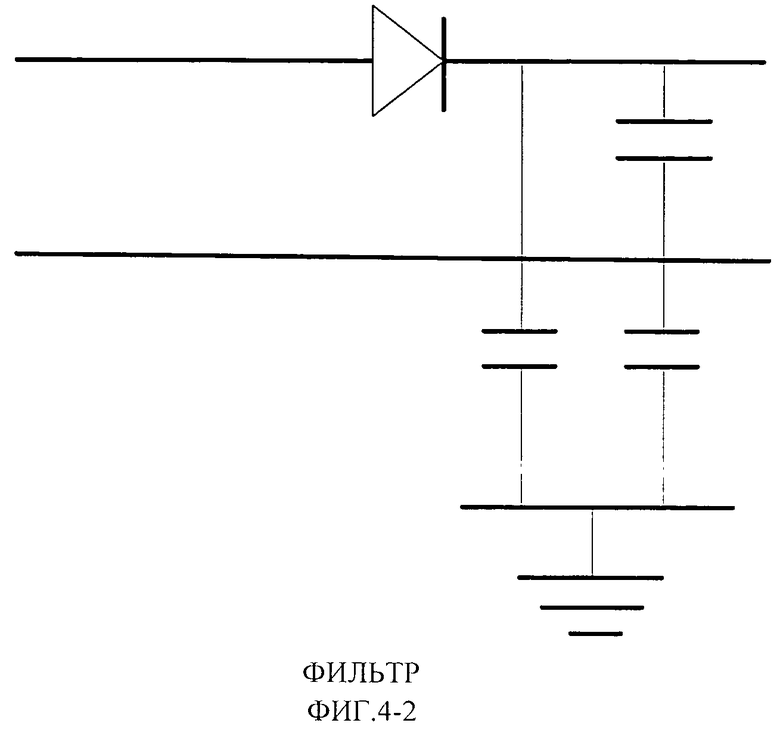
Фильтр содержит включенный в плюсовую шину диод, анод которого является входом, а катод - выходом фильтра. При этом между плюсовой и минусовой шиной включен низкочастотный конденсатор, а каждая из шин, и плюсовая, и минусовая, через свои высокочастотные конденсаторы подключены к шине земли.
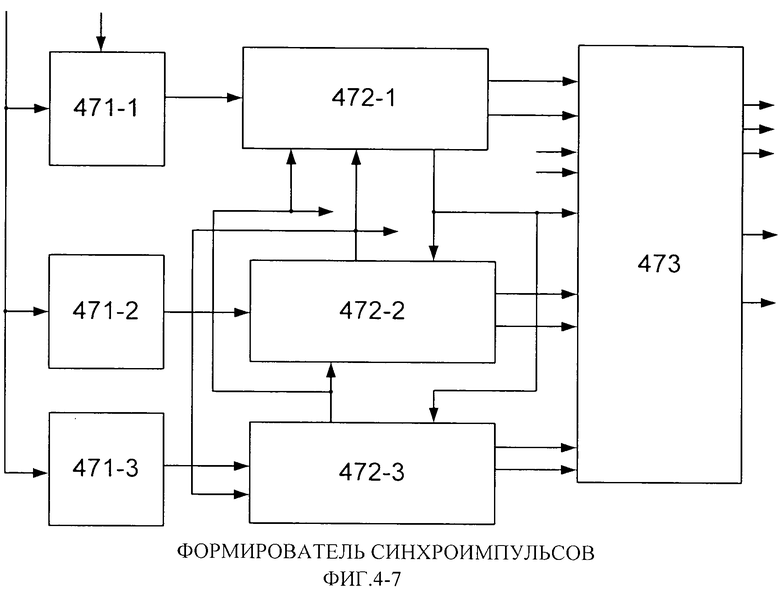
ФСИ содержит первый, второй и третий генераторы импульсов, установочный вход которых является одноименным входом формирователя, а выход каждого из генераторов подключен к входу своего, соответственно первого, второго и третьего блоков фазирования, фазирующий выход каждого из которых подключен к фазирующим входам двух других блоков и фазирующим входам блока мажоритации, а синхронизирующие выходы блоков фазирования подключены к синхронизирующим входам блока мажоритации, выходы которого являются выходами формирователя.
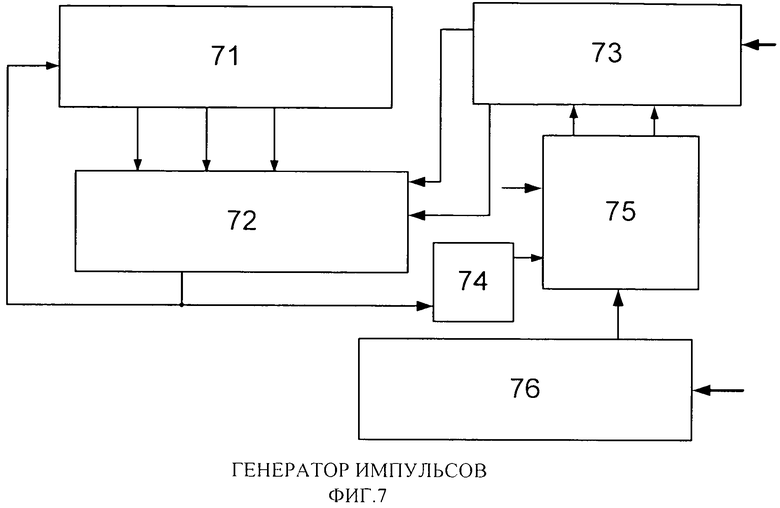
Генератор импульсов содержит группу последовательно включенных инверторов, выходы которых подключены к входу первого мультиплексора, выход которого подключен к входам первого инвертора и первого счетчика частоты и является выходом генератора. Выходы первого счетчика частоты подключены к первым входам первой схемы сравнения, ко вторым входам которой подключены выходы первого регистра кода частоты, а инкрементный и декрементный выходы этой схемы подключены к одноименным входам первого счетчика кода частоты, выходы которого подключены к управляющим входам первого мультиплексора. При этом установочный вход первого регистра кода частоты и первого счетчика кода частоты являются установочным входом генератора.
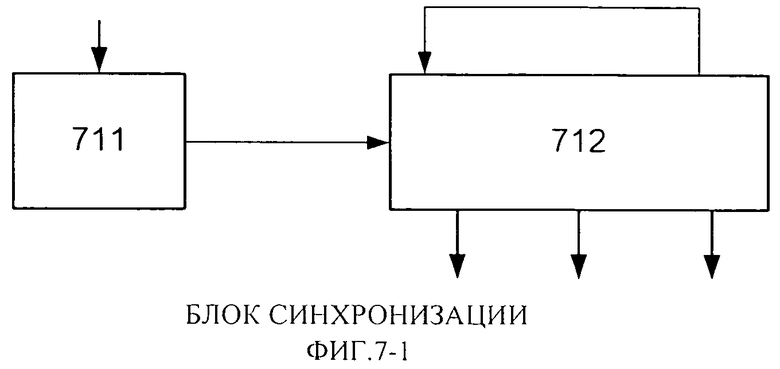
Блок синхронизации ВМ и устройство синхронизации МС выполнены идентично и каждый из них содержит управляемый генератор импульсов, управляющий вход которого является одноименным входом блока (устройства), а выход подключен к входу сдвигающего регистра, выходы которого являются синхронизирующими выходами блока (устройства).
Генератор импульсов и управляемый генератор импульсов реализованы аналогично друг другу.
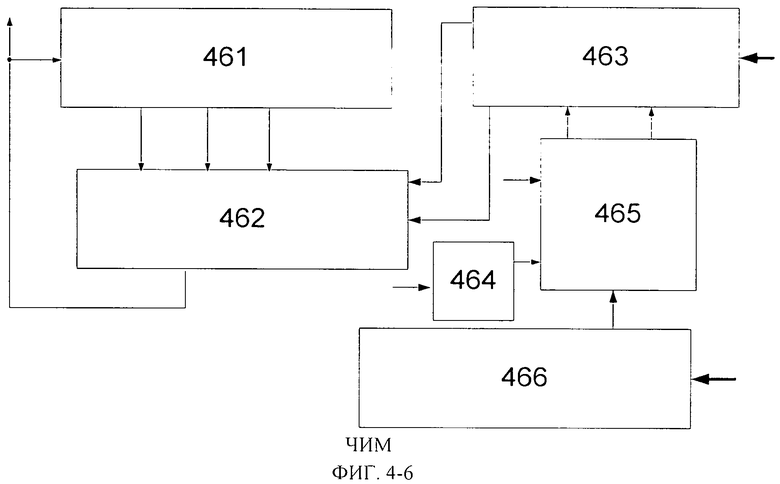
ЧИМ содержит несколько (n) последовательно включенных инверторов, выходы которых подключены к входам второго мультиплексора, выход которого подключен к входу первого инвертора и является выходом модулятора, вход которого является входом второго счетчика кода частоты. Выходы этого счетчика подключены к первым входам второй схемы сравнения, ко вторым входам которой подключены выходы второго регистра кода частоты, а инкрементный и декрементный выходы этой схемы сравнения подключены к одноименным входам второго счетчика кода частоты, выходы которого подключены к управляющим входам второго мультиплексора. При этом установочный вход второго регистра кода частоты и второго счетчика кода частоты являются установочным входом модулятора.
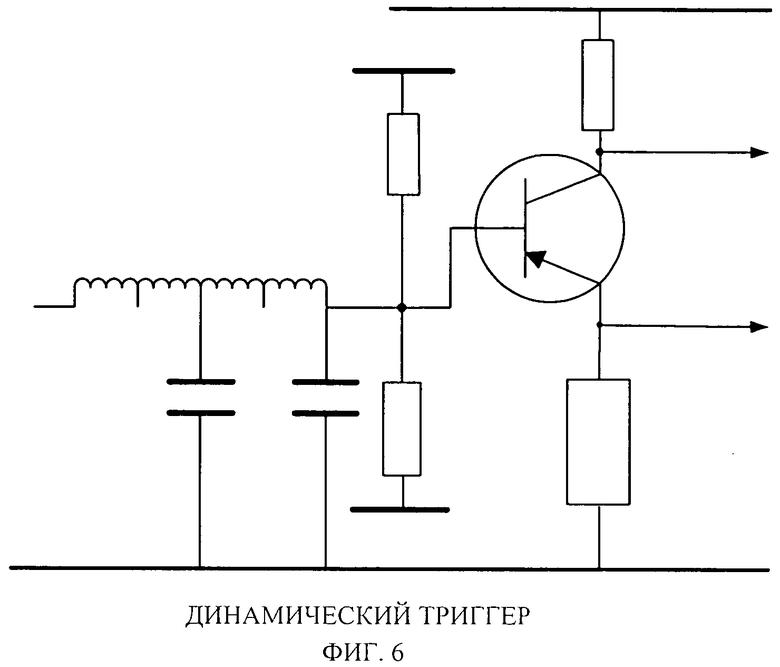
Динамический триггер реализован как транзисторный усилитель, к базе транзистора которого, помимо задающего рабочую точку резисторного делителя, подключена LC-цепь, выполняющая роль элемента памяти, индуктивность L которой содержит две обмотки: рабочую и намотанную поверх нее встречно - компенсационную, концы которой закорочены.
Чертежи системы и составляющих компонентов приведены на фигурах с 1 по 8.
Состав системы приведен на фигуре 1. Здесь цифрой 1 обозначено ОЭУ, цифрами 1-1 обозначены исполнительные органы, изменяющие угловое положение ОЭУ, цифрами 1-2 обозначены ПЗС матрицы, цифрами 1-3 обозначено СВУОИ и цифрами 2, 3 и 4 обозначены соответственно БИНПС, БЦВМ и ПЭП.
На фигуре 2 приведена БИНПС. Здесь цифрами 21 обозначен блок акселерометров, цифрами 21-1 - СВУАК, цифрами от 22-1 до 22-4 обозначены ДУС, цифрами 23 обозначено СВУ ДУС и цифрами 24 обозначен БМУ БИНПС. Расположение ДУС показано на фигуре 2-1, расположение ЧЭ АК - на фигуре 2-2.
БЦВМ приведена на фигуре 3. Здесь цифрами 31-1, 31-2 и 31-3 обозначены соответственно первый, второй и третий управляющие процессоры. Цифрами 32 и 33 обозначены соответственно переключатель каналов и блок контроля. Цифрами от 34-1 до 34-n обозначены вычислительные модули. Цифрами от 35-1 до 35-m обозначены модули связи. Цифрами 36-1 и 36-2 обозначены соответственно таймер и модуль обработки информации АСН и цифрами 37 и 38 обозначены соответственно ЗУСД и ДВВ.
ЗУСД приведено на фигуре 3-1. Здесь цифрами 311 и 312 обозначены соответственно первый и второй накопители, цифрами 313-1 и 313-2 обозначены соответственно первый и второй сумматоры времени и цифрами 314-1 и 314-2 обозначены соответственно первый и второй сумматоры массивов.
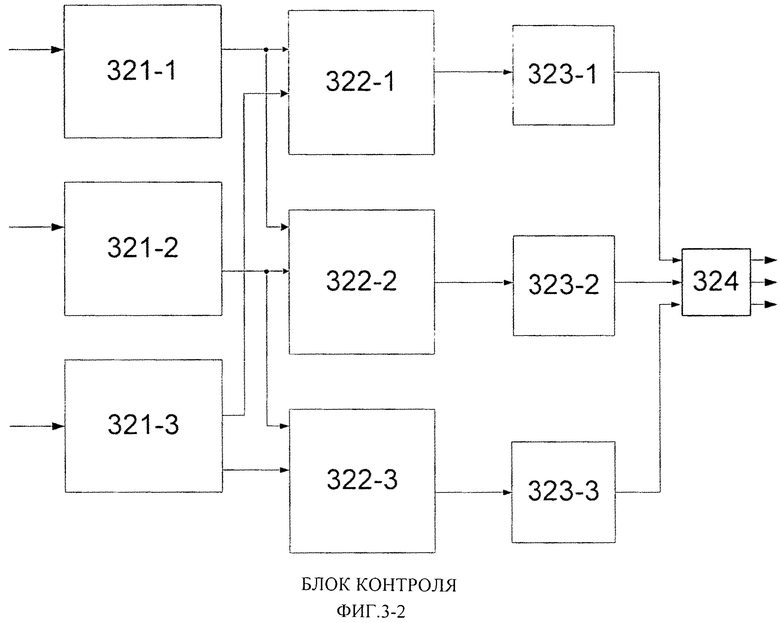
Блок контроля приведен на фигуре 3-2. На этой фигуре цифрами 321-1, 321-2 и 321-3 обозначены соответственно первый, второй и третий регистры 1 соответственно. Цифрами 322-1, 322-2 и 322-3 обозначены соответственно первая, вторая и третья схемы совпадения, цифрами 323-1, 323-2 и 323-3, обозначены триггеры ошибок и цифрами 324 обозначена логическая схема. Переключатель каналов приведен на фигуре 3-3.
Вычислительный модуль приведен на фигуре 3-4, где цифрами 340 обозначен блок процессора, цифрами 341 - блок запоминающего устройства, цифрами 342 обозначен блок синхронизации и цифрами 343 обозначен блок связи по магистрали.
Модуль связи приведен на фигуре 3-5. Здесь цифрами 350 обозначен процессор, цифрами 351 - запоминающее устройство, цифрами 352 обозначено устройство синхронизации, цифрами 353 - устройство связи по магистрали и цифрами 354 и 355 обозначены соответственно кодирующе-декодирующее устройство и приемопередатчик.
Таймер приведен на фигуре 3-6, где цифрами 361, 362 обозначены соответственно первый и второй таймерные счетчики, цифрой 363 - контрольный счетчик, цифрами 364 - таймерная схема контроля и цифрами 365 обозначено таймерное устройство связи по магистрали.
Накопитель приведен на фигуре 3-7, где цифрами 37 обозначен энергонезависимый элемент памяти.
ПЭП приведена на фигуре 4. Здесь цифрами 41-1 и 41-2 обозначены первый и второй первичные источники энергии соответственно, цифрами 42 - первый коммутатор. Цифрами 43-1 и 43-2 обозначены соответственно первый и второй аккумуляторы, цифрами 44 - второй коммутатор и цифрами 45 и 46 обозначены соответственно БКУ и ИВЭП.
ИВЭП приведен на фигуре 4-1, где цифрами 411, 412 и 413 обозначены соответственно МПП, МИП и ФСИ.
На фигуре 4-2 приведен фильтр.
МПП приведен на фигуре 4-3. Здесь цифрами от 43-1 до 43-3 обозначены конверторы, цифрами 432 - БУК и цифрами 433 и 434 обозначены БО и БВ.
МИП приведен на фигуре 4-4.
Конвертор приведен на фигуре 4-5. Здесь цифрами 451 и 453 обозначены фильтр и выходной фильтр, цифрами 452 - трансформатор, цифрами 454 обозначен преобразователь напряжения в частоту, элемент развязки обозначен цифрами 455, цифрами 456 и 457 обозначены ЧИМ и транзистор-прерыватель.
ЧИМ приведен на фигуре 4-6. Здесь цифрами 461 обозначены инверторы, цифрами 462 - второй мультиплексор, цифрами 463 обозначен второй счетчик частоты и цифрами 464, 465 и 466 обозначены соответственно второй счетчик кода частоты, вторая схема сравнения и второй регистр кода частоты.
ФСИ приведен на фигуре 4-7. На этой фигуре цифрами от 471-1 до 471-3 обозначены генераторы импульсов, цифрами от 472-1 до 472-3 обозначены блоки фазирования и цифрами 473 обозначен блок мажоритации.
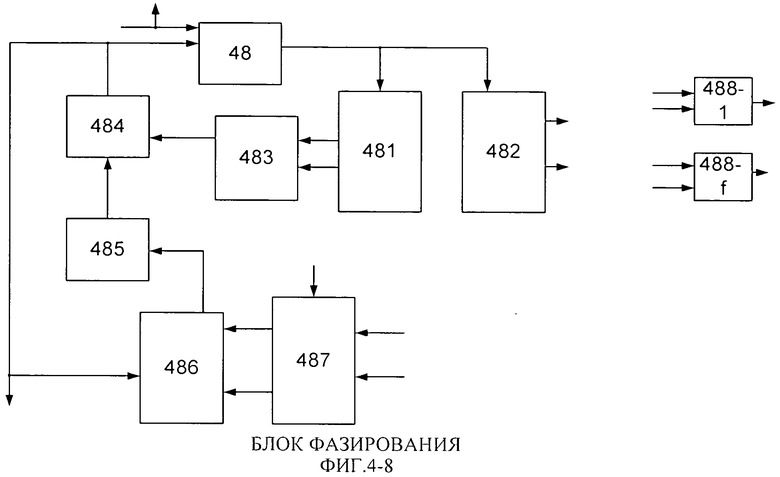
Блок фазирования приведен на фигуре 4-8. Здесь цифрами 48 обозначен элемент И, цифрами 481 и 482 обозначены счетчик на динамических триггерах и сдвиговый регистр, цифрой 483 - динамический дешифратор, цифрами 484 и 485 обозначены триггеры останова и пуска, цифрами 486 и 487 обозначены соответственно мажоритарный элемент и триггеры привязки и цифрами от 488-1 до 488-f обозначены триггеры формирователи.
На, фигуре 4-9 приведен состав БУК, где цифрами от 491-1 до 491-4 обозначены соответственно первый, второй, третий и четвертый частотные счетчики, цифрами от 492-1 до 492-4 обозначены соответственно первый, второй, третий, четвертый сумматоры, цифрами от 493-1 до 493-4 обозначены соответственно первая, вторая, третья, четвертое устройства сравнения, цифрами от 494-1 до 494-4 обозначены соответственно первый, второй, третий, четвертый триггера неисправностей, цифрой 495 обозначена группа логических элементов, цифрой 496 - регистр допуска, цифрой 497 обозначен регистр кода, цифрой 498 - контрольный преобразователь напряжения в частоту.
ДВВ приведен на фигуре 5, где цифрами 50 и 51 обозначены чувствительный элемент датчика и формирователь сигнала. Чувствительный элемент датчика приведен на фигуре 5-1.
На фигуре 5-2 приведен формирователь сигнала, где цифрами 520 обозначен кварцевый задающий генератор, цифрами 521 и 522 обозначены таймерные счетчик и дешифратор, цифрами 523 - триггер блокировки, цифрами 524 и 525 обозначены регистр санкционированного кода и кодовый дешифратор, цифрами 526 обозначен логический элемент. Динамический триггер приведен на фигуре 6.
Генератор импульсов приведен на фигуре 7, где цифрой 71 обозначены инверторы, цифрой 72 - первый мультиплексор, цифрой 73 - первый счетчик кода частоты, цифрой 74 обозначен первый счетчик частоты, цифрой 75 - первая схема сравнения, и цифрой 76 обозначен первый регистр кода частоты. Блок синхронизации приведен на фигуре 7-1, где цифрой 711 обозначен генератор импульсов, цифрой 712 - сдвиговый регистр.
На фигуре 8 приведен СВУ ОН, где цифрами от 81-1 до 81-k обозначены соответственно первый, второй и k-й вычислительные микропроцесоры, цифрой 82 обозначен обрабатывающий БМУ, цифрой 83 обозначен управляющий микропроцессор, цифрой 84 обозначено обрабатывающее ЗУ.
Система может быть реализована следующим образом:
ДУС и акселерометры реализуются в производстве ФГУП «НПО автоматики». Их СВУ реализуются на больших интегральных схемах (БИС) серий 1825 и 1620, изготавливаемых АО «Ангстрем», дополненных БИС, реализованных на базовых матричных кристаллах (БМК), серий 1555 и 1556, изготавливаемых также АО «Ангстрем». БЦВМ реализуется на БИС серий 11825 и 1620, дополненных БИС на основе БМК серий 1555 и 1556, которые изготавливаются АО «Ангстрем». ЗУСД и ДВВ изготавливаются в производстве ФГУП «НПО автоматики» на основе дискретных элементов и бескорпусных микросхем, устанавливаемых в многокристальные сборки типа «Система в корпусе». ОЗУ совместно с ИО изготавливается в производстве ЦКБ «Геофизика-Космос» и ПЭП изготавливается в производстве ФГУП «НПО автоматики» из микроэлектронных элементов, аттестованных для применения в САУ изделиями РКТ и РТК, работающими в экстремальных условиях и полях ионизирующего излучения. При этом в качестве первичных источников энергии используются солнечные батареи, химические источники тока (ампульная батарея, ядерно-энергетическая установка или перспективный радиоизотопный теплоэлектрогенератор (РИТЭГ).
Система работает следующим образом. После задействования первичных источников энергии и выхода на рабочий режим ИВЭП по командам БЦВМ вводятся исходные данные для работы БИНПС и ОЭУ. Производится привязка оптических осей телескопов ОЭУ и выставка через ИО их оптических осей на расчетные углы визирования. Производится обсервация, т.е. опознавание навигационного созвездия специализированным вычислительным устройством ОЭУ (проведение внутрикадровой обработки) и определение по программам БЦВМ навигационных углов визирования по информации снятой с обеих ПЗС-матриц (проведение межкадровой обработки) по результатам обработки БЦВМ, формирует пакет навигационной информации о угловом положении объекта, его угловых плоскостях и координатах, скорости и ускорения центра масс объекта управления. Периодически по командам БЦВМ производится связь с АСН, по информации которой уточняются показания БИНПС и ОЭУ и формируется корреляционная матрица ошибок этих подсистем, эти ошибки учитываются в дальнейшем при решении навигационных задач в БЦВМ. Кроме того, БЦВМ проводит периодический перевод всех вычислителей подсистем и собственных модулей ВМ и МС в режим тестовых проверок по результатам которых определяется исправность рабочих и резервных модулей и проводится реконфигурация их структуры с включением в работу исправных модулей. Проводится также определение предельно возможного быстродействия модулей и цифровых устройств системы и подсистем и установление перестройкой частоты генераторов импульсов максимально возможного быстродействия при текущем состоянии параметров их полупроводниковых элементов, связанных с изменением температуры окружающей среды и дозовыми эффектами в полупроводниковых структурах, вызванных ионизирующим излучением.
Периодически (раз в цикле (1 мс) решения задач) модули БЦВМ формируют рестартовые массивы для повторения вычислений цикла в случае сбоя их работы, вызванного импульсным внешним излучением или параметрическими отказами их элементов, и записывают эти массивы в ЗУСД, накопители которых блокируются и поддерживаются на время действия внешнего излучения сигналами ДВВ. В результате запрещается несанкционированное обращение к ним, вызванное сбоями в работе модулей от внешних воздействий. Проведя самовосстановление своей работы, БЦВМ проводит перезапуск всех подсистем вводом набора установок и исходных данных в память их вычислительных устройств. Для нейтрализации катастрофических отказов, вызванных старением и действием тяжелых заряженных частиц космического пространства, БЦВМ и все функциональные компоненты подсистем и ОЭУ имеют резервирование.
Таким образом, введение в состав системы оптоэлектронного устройства с двумя телескопами, устанавливаемые на заданное пространственное направление через индивидуальные исполнительные органы, управляемые командами БЦВМ, наличие в составе этого устройства своего специализированного вычислительного устройства, обрабатывающего с высокой скоростью оптические изображения и ведущее их опознавание позволяет без участия оператора получать необходимую навигационную информацию, а наличие в составе системы собственной БИНПС со встроенными специализированными вычислителями обеспечивает привязку осей телескопов к пространственным координатам объекта управления также без участия операторов. Введение в состав всех вычислителей перестраиваемых генераторов частоты (импульсов) и перестройка напряжения постоянного питания обеспечивает подстройку быстродействия вычислительных узлов под фактическое быстродействие их полупроводниковых элементов, нейтрализуя тем самым параметрические уходы быстродействия элементов из-за изменения внешней температуры в широком диапазоне и действия дозовых факторов постоянных полей ионизирующего излучения. Наличие в БЦВМ ЗУСД с датчиком внешних воздействий позволяет восстановить работоспособность БЦВМ, а с ее помощью и всей системы после импульсного внешнего электромагнитного воздействия, а наличие аппаратурного резерва компонентов позволяет автоматически без участия оператора нейтрализовать катастрофические отказы в компонентах системы, вызванные старением и действием тяжелых заряженных частиц космического пространства.
Исходя из этого, можно сделать вывод, что предложенная система обеспечивает получение достоверной навигационной информации при работе в экстремальных условиях и полях постоянного и импульсного ионизирующего излучения без участия оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| НЕЙРОВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2553098C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2536434C2 |
| СБОЕУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2541839C2 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |
| МАГИСТРАЛЬНО-МОДУЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2013 |
|
RU2564626C2 |
| КОНТРОЛЛЕР ПЕРЕДАЧИ ДАННЫХ | 2013 |
|
RU2514135C1 |
| РЕЗЕРВИРОВАННЫЙ ИСТОЧНИК ТОКА | 2013 |
|
RU2512890C1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |



Изобретение относится к области автоматики и может быть использовано при создании систем автоматического управления (САУ) изделиями и объектами ракетно-космической техники (РКТ) и робототехнических комплексов (РТК), работающих в экстремальных внешних условиях. Технический результат - расширение функциональных возможностей. Для этого cиcтема содержит оптоэлектронное устройство с двумя телескопами и исполнительными органами для управления телескопами, ПЗС матрицами, установленными в фокусе телескопов, и специализированным вычислительным устройством (СБУ) обработки изображений, Обеспечение энергией осуществляет подсистема электропитания (ПЭП). Кроме этого, система содержит аппаратуру спутниковой навигации, бесплатформенную инерциальную навигационную подсистему (БИНПС), бортовую цифровую вычислительную машину (БЦВМ) и подсистему электропитания (ПЭП). Наличие встроенного резервирования во всех компонентах системы с собственными средствами контроля и нейтрализации катастрофических отказов позволяет нейтрализовать катастрофические отказы в компонентах, вызванные временем и действием тяжелых заряженных частиц космического пространства. 29 з.п. ф-лы, 29 ил.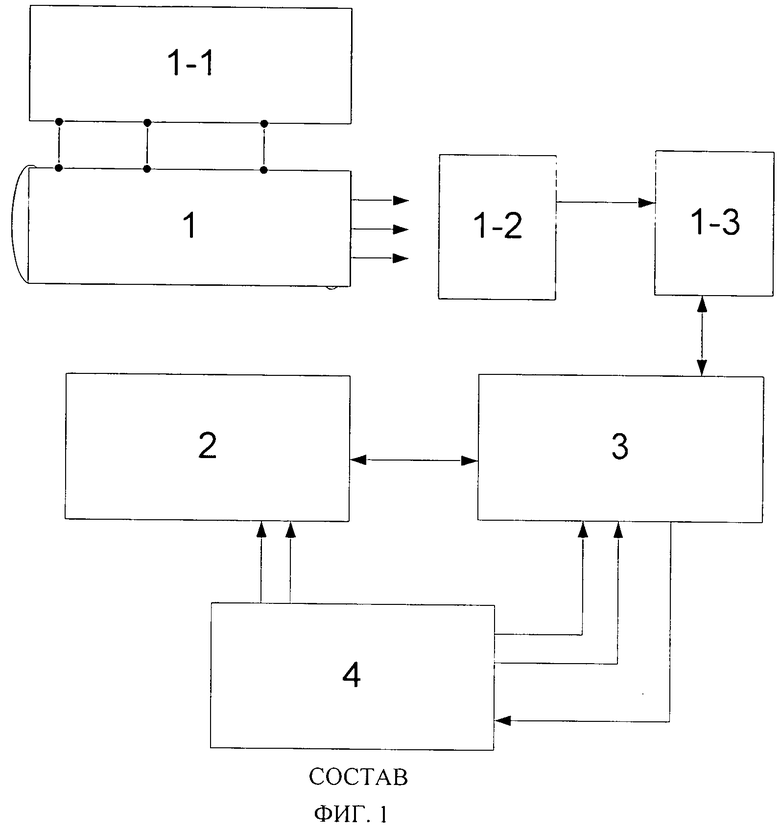
1. Система астронавигации, содержащая оптоэлектронное устройство, подключенное к бортовой цифровой вычислительной машине, отличающаяся тем, что в ее состав введены подключенные через мультиплексные магистрали аппаратура спутниковой навигации, бесплатформенная инерциальная навигационная подсистема, исполнительные органы оптоэлектронного устройства и подключенная установочным входом к управляющему выходу бортовой цифровой вычислительной машины подсистема электропитания, выходы которой подключены к синхронизирующим входам питания всех подсистем и компонентов системы.
2. Система по п.1, отличающаяся тем, что бесплатформенная инерциальная навигационная подсистема содержит блок акселерометров, выходы трех акселерометров которого подключены к входам специализированного вычислительного устройства акселерометров, и блок датчиков угловой скорости, выходы каждого из четырех датчиков которого подключены к входам своего специализированного вычислительного устройства датчиков угловой скорости, вход-выход которого совместно с входом-выходом специализированного вычислительного устройства акселерометров через мультиплексную магистраль подключен к бортовой цифровой вычислительной машине.
3. Система по п.1, отличающаяся тем, что бортовая цифровая вычислительная машина содержит первый, второй и третий управляющие процессоры, подключенные выходами к входам блока контроля и входам переключателя каналов, управляющие входы которого подключены к выходам блока контроля, причем установочный выход переключателя каналов является установочным выходом машины, а два магистральных входа-выхода переключателя каналов подключены к системной дублированной магистрали, к которой подключены n вычислительных модулей и m модулей связи по мультиплексным магистралям, являющимся магистральными связями машины с остальными подсистемами и аппаратурой спутниковой навигации, при этом к магистрали подключен таймер и запоминающее устройство с санкционированным доступом, блокирующий вход которого подключен к выходу датчика внешнего воздействия.
4. Система по п.1, отличающаяся тем, что подсистема электропитания содержит первый и второй первичные источники энергии, подключенные выходами к первой группе входов блока контроля и управления и входам первого коммутатора, выходы которого подключены к входам первого и второго аккумуляторов, подключенных выходами к входам второй группы входов блока контроля и управления, и входам второго коммутатора, подключенного выходом к силовому входу источника вторичного электропитания, выходы постоянного и импульсного питания и выходы синхроимпульсов которого являются одноименными выходами подсистемы, установочный вход которой является установочным входом источника вторичного электропитания и блока контроля и управления, управляющие выходы которого подключены к управляющим входам коммутаторов.
5. Система по п.1, отличающаяся тем, что оптоэлектронное устройство содержит первый и второй телескоп с оптическими осями, расположенными под углом π/2 друг к другу, причем перпендикулярно его оси в каждом телескопе установлена оптическая матрица на основе приборов с зарядовой связью, выходы которых подключены к входам специализированного вычислительного устройства обработки изображений, вход-выход которого является входом-выходом устройства.
6. Система по п.2, отличающаяся тем, что блок акселерометров, содержит три акселерометра, оси чувствительности которых расположены по трем смежным, исходящим из одной вершины граням условного куба, диагональ которого совпадает с основной приборной осью подсистемы и объекта управления, а выходы чувствительных элементов подключены к входам специализированного вычислительного устройства акселерометров, вход-выход которого является входом-выходом блока.
7. Система по п.2, отличающаяся тем, что блок датчиков угловой скорости содержит четыре датчика угловой скорости, оси трех из которых совпадают с исходящими из одной вершины гранями условного куба, а ось четвертого совпадает с исходящей из той же вершины диагональю этого куба, причем выходы всех датчиков подключены к входам специализированного вычислительного устройства датчиков угловой скорости, вход-выход которого является входом-выходом блока.
8. Система по п.5, отличающаяся тем, что специализированное вычислительное устройство обработки изображений содержит управляющий микропроцессор, входы и вход-выход которого являются входами и входом-выходом устройства, а через первую магистраль к нему подключено k вычислительных микропроцессоров, подключенных через вторую магистраль к обрабатывающему запоминающему устройству, подключенного двунаправленной связью к управляющему микропроцессору, установочный выход которого подключен к установочным входам обрабатывающего блока микропрограммного управления, содержащего обрабатывающий синхронизатор, управляющие и синхронизирующие выходы которых подключены к соответствующим входам всех микропроцессоров и обрабатывающего запоминающего устройства.
9. Система по п.6, отличающаяся тем, что специализированное вычислительное устройство акселерометров содержит микропроцессор, входы и вход-выход которого являются входами и входом-выходом устройства, а выход микропроцессора подключен через буферный регистр к входам n умножителей, соединенных последовательно шинами переноса, при этом выходы умножителей подключены к входам сумматора, подключенного выходом к входу первого блока связи, вход-выход которого является входом-выходом устройства, а вход блока связи подключен к установочным входам первого блока микропрограммного управления, управляющие и синхронизирующие выходы которого подключены к соответствующим входам остальных компонентов устройства.
10. Система по п.6, отличающаяся тем, что акселерометр содержит счетчик, к входу которого подключен выход чувствительного элемента акселерометра, который выполнен как кварцевый задающий генератор, скол кварца которого является осью чувствительности элемента, а выход счетчика является выходом акселерометра.
11. Система по п.7, отличающаяся тем, что специализированное вычислительное устройство датчиков угловой скорости содержит первый и второй матричные вычислители, к которым через магистраль подключены матричное запоминающее устройство и второй блок связи, вход-выход которого является входом-выходом устройства, а вход подключен к установочному входу второго блока микропрограммного управления, содержащего второй синхронизатор, управляющие и синхронизирующие выходы которого подключены к соответствующим входам остальных компонентов устройства.
12. Система по п.7, отличающаяся тем, что датчик угловой скорости содержит расположенные на одной оси чувствительный элемент грубого отсчета и чувствительный элемент точного отсчета, которые выполнены идентично, и каждый из них содержит задающий генератор, выход которого является контрольным выходом датчика и подключен к входу передатчика оптического и вычитающему входу дифференциального счетчика, к суммирующему входу которого подключен выход приемника оптического, подключенного к выходу намотанного в виде катушки волокна оптического, к входу которого подключен выход передатчика оптического, а выход каждого счетчика является выходом датчика, установочный вход которого является установочным входом задающих генераторов.
13. Система по п.3, отличающаяся тем, что таймер содержит первый и второй таймерные счетчики-формирователи и контрольный счетчик, подключенные выходами к таймерному устройству контроля, а через магистраль - к таймерному устройству связи, подключенного входом к выходу устройства контроля, причем входы-выходы устройства связи являются входами-выходами таймера.
14. Система по п.3, отличающаяся тем, что блок контроля содержит первый, второй и третий регистры, входы которых являются входами блока, причем выход первого регистра подключен к первым входам первой и третьей схем совпадения, выход второго регистра подключен ко второму входу первой схемы совпадения и первому входу второй схемы совпадения, выход третьего регистра подключен ко вторым входам второй и третьей схем совпадения, а выходы всех схем совпадения подключены к входам логической схемы, выходы которой являются выходами блока.
15. Система по п.3, отличающаяся тем, что переключатель каналов содержит три полевых транзистора, истоки которых являются входами, стоки - выходами, а управляющие входы соединены с затворами транзисторов.
16. Система по п.3, отличающаяся тем, что запоминающее устройство с санкционированным доступом содержит первый и второй накопители, блокирующие входы которых являются блокирующим входом запоминающего устройства, а вход-выход каждого из накопителей подключен к шине связи запоминающего устройства, к которой через первую и вторую двунаправленные связи подключен соответственно первый и второй сумматоры массивов, каждый из которых через свою соответственно первую и вторую массивную двунаправленную связи, подключен к своему соответственно первому и второму накопителю, к каждому из которых через свою соответственно первую и вторую временную двунаправленную связи подключен выход соответственно первого и второго сумматоров времени, вход каждого из которых является входом метки времени запоминающего устройства.
17. Система по п.3, отличающаяся тем, что датчик внешнего воздействия содержит чувствительный элемент, подключенный выходом к входу формирователя сигнала, кодовый вход которого является кодовым входом датчика, выход формирователя является выходом датчика.
18. Система по п.4, отличающаяся тем, что источник вторичного электропитания содержит модуль постоянного питания и модуль импульсного питания, силовые входы которых являются силовым входом источника, а выходы постоянного и импульсного питания - одноименными выходами источника, установочный вход которого является установочным входом модуля постоянного питания и формирователя синхроимпульсов, три управляющих выхода которого подключены к управляющим входам модуля импульсного питания, а синхронизирующие выходы и выход метки времени являются одноименными выходами источника.
19. Система по п.18, отличающаяся тем, что модуль постоянного питания содержит три конвертора, силовые и установочные входы которых являются одноименными входами модуля, а их частотные выходы и выходы постоянного питания подключены соответственно к частотным входам и контрольным входам блока управления и контроля, причем выходы постоянного питания через блок отключения подключены к входам блока выравнивания, выход которого является выходом модуля и подключен к дополнительному контрольному входу блока управления и контроля, установочный вход которого является одноименным входом модуля.
20. Система по п.18, отличающаяся тем, что модуль импульсного питания содержит три идентичные цепи, объединенные с каждой из сторон, одна из которых является силовым входом модуля, вторая - выходом, причем в каждой цепи последовательно включены два полевых транзистора, а три входных управляющих сигнала разведены таким образом, что каждый из них подключен к затворам двух транзисторов, установленных в разных цепях, образуя выборку «2 из 3».
21. Система по п.18, отличающаяся тем, что формирователь синхроимпульсов содержит первый, второй и третий генераторы импульсов, выход каждого из которых подключен к входу своего соответственно первого, второго и третьего блока фазирования, фазирующий выход каждого из которых подключен к фазирующим входам двух других блоков и фазирующим входам блока мажоритации, к синхронизирующим входам которого подключены синхронизирующие выходы блоков фазирования, а выходы блока мажоритации являются синхронизирующими выходами, выходом метки времени и трех управляющих сигналов формирователя.
22. Система по п.19, отличающаяся тем, что блок отключения содержит три полевых транзистора, истоки которых являются входами, стоки выходами, а управляющие входы соединены с затворами транзисторов.
23. Система по п.19, отличающаяся тем, что блок выравнивания содержит три идентичные ветви, в каждой из которых установлены последовательно включенные резистор и диод, причем первый вывод резистора является входом, второй вывод подключен к аноду диода, а катоды диодов объединены и являются выходом блока.
24. Система по п.19, отличающаяся тем, что конвертор содержит последовательно включенные фильтр, вход которого является силовым входом конвертора, трансформатор с включенным в первичную обмотку транзистором - прерывателем, выпрямляющий диод, выходной фильтр, выход которого является выходом конвертора и подключен к входу преобразователя напряжения в частоту, подключенного выходом к входу элемента развязки, выход которого является частотным выходом конвертора и подключен к входу частотно-импульсного модулятора, установочный вход которого является установочным входом конвертора, а выход подключен к базе транзистора-прерывателя.
25. Система по п.19, отличающаяся тем, что блок управления и контроля содержит первый, второй, третий и четвертый частотные счетчики, входы первых трех из которых являются частотными входами блока, а вход четвертого счетчика подключен к выходу контрольного преобразователя напряжения в частоту, входы которого являются контрольными и дополнительным контрольным входами блока, у которого выход первого частотного счетчика подключен к первым входам первого и третьего сумматоров, выход второго частотного счетчика подключен к первому входу второго сумматора и второму входу первого сумматора, выход третьего частотного счетчика подключен ко вторым входам второго и третьего сумматоров, а выход четвертого счетчика подключен к первому входу четвертого сумматора, ко второму входу которого подключен выход регистра кода, вход которого является установочным входом блока и объединен с входом регистра допуска, выход которого подключен к первым входам первого, второго, третьего и четвертого устройств сравнения, ко вторым входам каждого из которых подключен выход своего, соответственно первого, второго, третьего и четвертого сумматоров, а выход каждого из устройств сравнения, первого, второго, третьего и четвертого, через свой соответственно первый, второй, третий и четвертый контрольные триггеры подключены к входам логического устройства, выходы которого являются управляющими выходами блока.
26. Система по п.21, отличающаяся тем, что генератор импульсов содержит n последовательно включенных инверторов, выходы которых подключены к входам первого мультиплексора, выход которого является выходом блока и подключен к входу первого инвертора и входу первого счетчика частоты, выходы которого подключены к первым входам первой схемы сравнения, ко вторым входам которой подключены выходы регистра кода частоты, а инкрементный и декрементный выходы этой схемы сравнения подключены к одноименным входам первого счетчика кода частоты, выходы которого подключены к управляющим входам первого мультиплексора, а установочный вход этого счетчика объединен с входом регистра кода частоты и является установочным входом генератора.
27. Система по п.21, отличающаяся тем, что блок фазирования содержит логический элемент, первый вход которого является входом блока, а выход подключен к входам сдвигового регистра и к входу выполненного на динамических триггерах счетчика, выход которого через дешифратор подключен к запускающему входу триггера останова, выход которого является фазирующим выходом блока и подключен ко второму входу логического элемента и первому входу мажоритарного элемента, ко второму и третьему входу которого подключены выходы триггеров привязки, входы которых являются фазирующими входами блока, при этом выходы четных и нечетных разрядов сдвигового регистра подключены соответственно к запускающим и сбрасывающим входам триггеров формирователей, выходы которых являются синхронизирующими выходами блока.
28. Система по п.24, отличающаяся тем, что фильтр содержит в плюсовой цепи диод, анод которого является входом, катод - выходом, причем между катодом и минусовой шиной установлен низкочастотный конденсатор, а минусовая шина и катод дополнительно, через свой высокочастотный конденсатор, подключены к шине земли.
29. Система по п.24, отличающаяся тем, что частотно-импульсный модулятор содержит группу последовательно соединенных инверторов, подключенных выходами к входам второго мультиплексора, выход которого подключен к входу первого инвертора и является выходом модулятора, вход которого является входом второго счетчика частоты, подключенного выходами к первым входам второй схемы сравнения, ко вторым входам которой подключены выходы второго регистра кода частоты, а инкрементный и декрементный выходы этой схемы сравнения подключены к одноименным входам второго счетчика кода частоты, выходы которого подключены к управляющим входам второго мультиплексора, причем вход второго счетчика кода частоты объединен с входом второго регистра частоты и является установочным входом модулятора.
30. Система по п.27, отличающаяся тем, что динамический триггер выполнен как транзисторный усилитель, к базе транзистора которого помимо резисторного делителя подключена выполняющая роль элемента памяти LC-цепь, индуктивность L которой имеет рабочую обмотку и намотанную поверх нее, встречно-компенсационную, концы которой закорочены.
| СПОСОБ И УСТРОЙСТВО ОТОБРАЖЕНИЯ ПРОСТРАНСТВЕННЫХ ОБЪЕКТОВ | 1998 |
|
RU2143718C1 |
| УСТРОЙСТВО, СПОСОБ И ПРОГРАММА ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 2009 |
|
RU2469403C2 |
| Устройство для умножения чисел в модулярной системе счисления | 1989 |
|
SU1667065A1 |
| EP 1177529 В1, 02.02.2005 | |||
| US 5596339 А1, 21.01.1997 | |||

