Изобретение относится к вычислительным устройствам для обработки информации (изображений) и может быть использовано при зондировании различных поверхностей и сред в радиолокации, оптике и медицине.
Известен способ обработки изображений на основе использования алгоритмов совместного обнаружения и распознавания (Яковлев А.М., Максимук А.Н. Алгоритмы обнаружения и распознавания распределенных надводных целей в РСА. Научно-методические материалы «Цифровая обработка сигналов» - М.: ВВИА им. Н.Е.Жуковского, - 1995), основанный на методе максимума апостериорной плотности вероятности к проверке гипотез и использовании модели изображения в виде независимых элементарных отражателей. В основе данного подхода лежат известные правила одновременного выбора статистических гипотез и оценивания параметров, разработанные для сигналов (Трифонов А.П., Шинаков Ю.С. Совместное различение сигналов и оценка их параметров на фоне помех. - М.: Радио и связь, 1986. - 264 с.).
Недостатками данного способа являются: невозможность учета пространственной взаимосвязи между пикселами и отражения пространственной структуры изображения, что, в свою очередь, приводит к возможной некорректности получаемых решений (Василенко Г.И., Тараторин А.М. Восстановление изображений. М.: Радио и связь 1986, 304 с., ил.) и ограничивает применение этого способа для широкого круга практических задач. Кроме того, данный способ не предполагает классификации изображений и многоальтернативного варианта их обработки.
Техническим результатом изобретения является повышение информативности пространственно-временной обработки изображений, обеспечивающей корректное восстановление различных изображений с определением принадлежности их одному из рассматриваемых классов.
Сущность изобретения состоит в следующем. Непосредственно перед процессом обработки производят формирование моделей исходных изображений, определяют их количество, структуру и параметры в соответствии со множеством рассматриваемых классов и имеющимися сведениями об исходных изображениях (текстура, контраст, масштаб и т.д.). При обработке эти модели используют для восстановления различных классов изображений, полученные оценки для каждого из рассматриваемых классов используют при принятии решений относительно принадлежности результата восстановления к одному из классов, при этом усредненные отношения правдоподобия сравнивают с набором пороговых значений, которые формируют предварительно.
В качестве модели исходных изображений используют линейные дифференциальные уравнения математической физики в частных производных гиперболического, параболического и эллиптического типа (Коренной А.В., Егоров С.А., Лепешкин С.А. Модель формирования сигналов в системах активного зондирования//Радиолокация, навигация и связь: Материалы 4-й Международной научно-технической конференции. - Воронеж: ВГУ, 1998. - Т.2. - С.1221-1231). Они позволяют использовать априорную информацию о пространственных свойствах исходного изображения, описать различные типы изображений путем подбора ее структуры и параметров, обеспечивают высокий уровень сходимости к реальным изображениям и обладают относительной простотой реализации.
Пространственно-временную обработку производят путем применения предлагаемого алгоритма совместного различения и восстановления случайных полей (Горев П.Г., Коренной А.В., Егоров С.А. Восстановление изображений в условиях априорной неопределенности как задача совместного различения и восстановления случайных полей//Радиотехника. - 1999, №3. - С.68-72), основанного на байесовском подходе. При этом производят совместную оптимизацию операций восстановления и различения. Причем процедура восстановления здесь предшествует различению изображений. Однако оценку поля, получаемую на выходе решающего устройства, формируют только после принятия решения в пользу одной из гипотез. Например, при функции потерь

где δik - символ Кронекера, αik - весовой коэффициент, выбираемый исходя из специфики решаемой задачи, байесовская оценка будет иметь вид
где Pk - вероятность наличия k-й гипотезы, lk - усредненное отношение правдоподобия,  - оценка восстанавливаемого поля при достоверном наличии в принимаемом сигнале преобразованного информационного поля k-го класса, ξ - принимаемый сигнал (наблюдение), из которого выделяется изображение.
- оценка восстанавливаемого поля при достоверном наличии в принимаемом сигнале преобразованного информационного поля k-го класса, ξ - принимаемый сигнал (наблюдение), из которого выделяется изображение.
Для формирования условной оценки используют любую известную методику восстановления изображений, но при этом в алгоритме применяют модель, сформированную для k-го класса изображений.
Полученные байесовские и условные оценки для каждого из классов изображений используют в процессе принятия решения в пользу одного из рассматриваемых классов (Горев П.Г., Коренной А.В., Егоров С.А. Восстановление изображений в условиях априорной неопределенности как задача совместного различения и восстановления случайных полей // Радиотехника. - 1999, №3. - С.68-72).
В отличие от известных способов, здесь при принятии решения усредненное отношение правдоподобия сравнивают с несколькими порогами, число которых зависит от количества рассматриваемых классов изображений (Горев П.Г., Коренной А.В., Егоров С.А. Восстановление изображений в условиях априорной неопределенности как задача совместного различения и восстановления случайных полей // Радиотехника. - 1999, №3. - С.68-72).
Это правило заключается в следующем: если усредненное отношение правдоподобия, сформированное для i-й гипотезы, больше пороговых значений, сформированных для всех остальных гипотез, то принимают решение в пользу этой i-й гипотезы. В противном случае ту же процедуру производят для следующей гипотезы, и так до тех пор, пока не будет принято решение в пользу какой-либо гипотезы. При этом дальнейший анализ в случае исключения i-го класса изображений производят только относительно тех гипотез, для которых порог оказался больше статистики li. В результате от одного этапа анализа к другому круг рассматриваемых классов сужают, уменьшая вероятность ошибочного принятия решения. Данные значения порогов формируют предварительно перед обработкой.
Структурная схема устройства, реализующего синтезированный алгоритм совместного различения и восстановления, представлена на чертеже. Она состоит из трех основных взаимосвязанных частей: устройства различения (блок формирования отношений правдоподобия (БОП), блок формирования порога и сравнения (БПС), ключевая схема (КС)), устройства восстановления (блок формирования условных оценок (БУО), блок формирования байесовских оценок (ББО)) и блока формирования априорных данных (БАД).
В БОП на основе наблюдаемой реализации производится формирование усредненного отношения правдоподобия для каждой из рассматриваемых гипотез. В этих целях используют существующие формирователи отношений правдоподобия, применяемые в обнаружителях сигналов.
БПС представляет собой вычислитель, формирующий значения различных порогов и сравнивающий их с усредненным отношением правдоподобия. Выходной сигнал БПС, несущий в себе информацию о выбранной гипотезе, управляет состоянием КС.
БУО формирует оценки случайного поля для каждой из рассматриваемых гипотез, используемые при формировании усредненных отношений правдоподобия. Для определения этих оценок можно использовать любые известные методики и устройства. Эти оценки также поступают в ББО, который представляет собой вычислитель, реализующий алгоритм (2). Байесовские оценки поступают на КС. На ее выход проходит та из оценок случайного поля, которая соответствует выходному сигналу БПС.
Одной из основных особенностей данного устройства является наличие БАД, который представляет собой запоминающее устройство, управляемое оператором и влияющее на работу остальных блоков. Использование априорных данных в алгоритмах, реализующих предлагаемый способ, является принципиально важным для обеспечения устойчивости результатов восстановления при получении условных оценок.
В данной схеме наглядно отражена тесная взаимосвязь между операциями различения и восстановления, их оптимальный алгоритм взаимодействия. Использование оценки информационного поля в устройстве различения позволяет значительно уменьшить вероятность ошибочного принятия решения. Коррекция формируемой оценки с учетом информации различителя на случай неопределенности относительно класса исходного изображения компенсирует потери при восстановлении исходного поля, когда речь идет об ошибочном принятии решения.
Применение предложенного способа позволит увеличить информативность результатов пространственно-временной обработки изображений и реализовать широкий круг сопутствующих задач, обеспечивая при этом устойчивость и высокую достоверность принимаемых решений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗА ОБЪЕКТА НА РАДИОЛОКАЦИОННОМ ИЗОБРАЖЕНИИ | 2012 |
|
RU2516000C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ ИЗОБРАЖЕНИЙ В РАДИОЛОКАЦИОННЫХ СИСТЕМАХ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2016 |
|
RU2647702C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ОБРАЗОВ ПРИРОДНО-ТЕХНОГЕННЫХ ОБЪЕКТОВ И ОЦЕНКИ ПАРАМЕТРОВ ИХ СОСТОЯНИЯ ПО ГИПЕРСПЕКТРАЛЬНЫМ ДАННЫМ АЭРОКОСМИЧЕСКОГО ЗОНДИРОВАНИЯ | 2010 |
|
RU2422858C1 |
| Способ оптимального восстановления изображений в радиолокационных системах дистанционного зондирования Земли | 2016 |
|
RU2624460C1 |
| СПОСОБ ВЕРИФИКАЦИИ ДИАГНОЗОВ БОЛЕЗНЕЙ ВЕН НИЖНИХ КОНЕЧНОСТЕЙ ПО ДАННЫМ КОМБИНИРОВАННОЙ ТЕРМОМЕТРИИ НА ОСНОВЕ БАЙЕСОВСКОГО КЛАССИФИКАТОРА И АПОСТЕРИОРНЫХ ВЕРОЯТНОСТЕЙ | 2006 |
|
RU2358644C2 |
| УСТРОЙСТВО РАЗРЕШЕНИЯ РАДИОИМПУЛЬСНЫХ СИГНАЛОВ НА ФОНЕ ПРОИЗВОЛЬНОЙ ПОМЕХИ | 2004 |
|
RU2269205C1 |
| УСТРОЙСТВО РАЗРЕШЕНИЯ СИГНАЛОВ НА ФОНЕ ПРОИЗВОЛЬНОЙ ПОМЕХИ | 2003 |
|
RU2251811C2 |
| ДЕТЕКТИРОВАНИЕ И ДЕКОДИРОВАНИЕ С УМЕНЬШЕННОЙ СЛОЖНОСТЬЮ ДЛЯ ПРИЕМНИКА В СИСТЕМЕ СВЯЗИ | 2006 |
|
RU2414062C2 |
| ИНТЕГРИРОВАННОЕ УСТРОЙСТВО ОПОЗНАВАНИЯ | 2015 |
|
RU2597870C1 |
| СПОСОБ ЛОКАЦИИ ЦЕЛИ (ВАРИАНТЫ) | 2003 |
|
RU2254592C1 |
Изобретение относится к вычислительным устройствам для обработки информации (изображений) и может быть использовано при зондировании различных поверхностей и сред в радиолокации, оптике и медицине. Техническим результатом изобретения является повышение информативности пространственно-временной обработки изображений, обеспечивающей корректное восстановление различных изображений с определением принадлежности их одному из рассматриваемых классов. Непосредственно перед процессом обработки производят формирование моделей исходных изображений, определяют их количество, структуру и параметры в соответствии со множеством рассматриваемых классов и имеющимися сведениями об исходных изображениях (текстура, контраст, масштаб и т.д.). При обработке эти модели используют для восстановления различных классов изображений, полученные оценки для каждого из рассматриваемых классов используют при принятии решений относительно принадлежности результата восстановления к одному из классов, при этом усредненные отношения правдоподобия сравнивают с набором пороговых значений, которые формируют предварительно. 1 ил.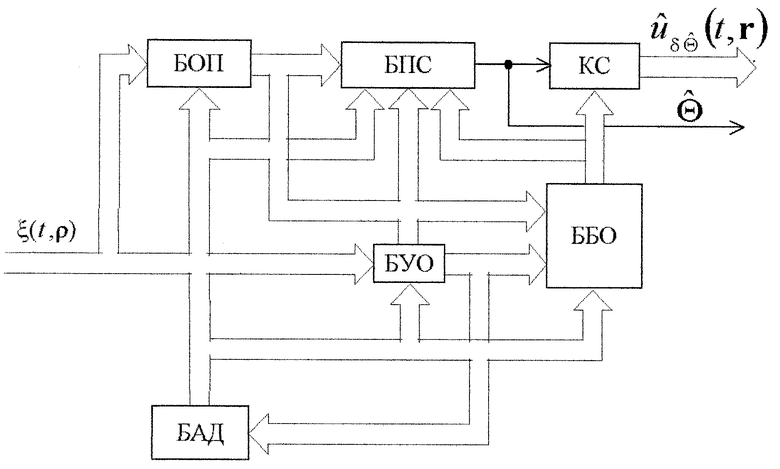
Способ пространственно-временной обработки изображений на основе алгоритмов совместного различения и восстановления, заключающийся в обработке радиосигналов, отраженных от материальных объектов или обусловленных их собственным излучением, с выделением функции рассеяния этих объектов, представляющей собой изображение, отличающийся тем, что модели исходных функций рассеяния формируют непосредственно перед обработкой на основе предварительных исследований самих зондируемых объектов, определяют количество, структуру и параметры моделей в соответствии со множеством рассматриваемых классов и имеющимися сведениями, при обработке эти модели непосредственно используют для восстановления различных классов изображений, полученные оценки для каждого из рассматриваемых классов используют при принятии решений относительно принадлежности результата восстановления к одному из классов, выделения из потока полученных результатов обработки радиосигналов изображений определенного типа, при этом усредненные отношения правдоподобия сравнивают с набором пороговых значений, которые формируют предварительно.
| ГОРЕВ П.Г | |||
| И ДР | |||
| Восстановление изображений в условиях априорной неопределенности как задачи совместного различения и восстановления случайных полей | |||
| Радиотехника, №3, 1999, с.44-47 | |||
| СИСТЕМА ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006942C1 |
| US 6057892 А, 02.05.2000 | |||
| US 3996559 А, 07.12.1976 | |||
| СТУПЕНЧАТАЯ КОМПОНОВКА ДЛЯ НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИН | 1994 |
|
RU2076198C1 |

