Группа изобретений относится к области экологического мониторинга природно-антропогенных геосистем, в частности, территорий нефтегазовых месторождений.
Экстенсивное освоение нефтегазовых месторождений порождает серьезные проблемы, связанные с угрозой экологической безопасности для этих территорий. Нарушения технологии освоения месторождений, техногенные аварии в промысловых зонах и трубопроводах приводят в результате к необратимой деградации почвы.
Разработка высокоэффективных геоинформационных систем оперативного геоэкологического контроля является необходимым условием для выполнения программы Государственного контроля использования и охраны земель. Особенностью таких систем является способность функционирования в тяжелых природных условиях на труднодоступных территориях с огромными площадями контроля.
Известны способы съемки пролетаемой территории и системы, обеспечивающие технологию съемки, сбора и обработки информации (патент ФРГ №19919487, кл. G 01 C 11/02, опубл. 23.11.2000 г., патент ФРГ №4419359, кл. G 01 C 11/04, опубл. 07.12.95 г.), обеспечивающие выполнение покадровой съемки, позиционирование с помощью данных глобальной спутниковой системы местоопределения и датчиков, установленных на борту летательного аппарата. Указанные способы и системы для их осуществления предназначены для съемки топографической поверхности и являются экономически неэффективными при мониторинге антропогенных геотехнических систем линейного вида, например, внутрипромысловых трубопроводов.
Известен также способ получения крупномасштабной карты параметров многомерной структуры природной среды и аэрофотосъемочный самолет для ее получения, заключающийся в проведении аэрофотосъемочного полета с управлением по трассе полета на высоте 150-500 м над землей, аэрофотосъемке с помощью разведывательной камеры и телекамеры с использованием аэрофотограмметрической методики. Одновременно с получением маршрутных стереоснимков получают снимки отдельных участков того же маршрута в более крупном масштабе.
Аэрофотосъемочный самолет для получения крупномасштабной карты параметров многомерной структуры природной среды оборудован программно-аппаратурным комплексом, включающим средства определения навигационно-радиометрических данных и блок управления полетом с расположенными вдоль оси самолета видеокамерами с экраном, выполненным с возможностью проецирования на него трассы полета и положений разведывательных камер, а также маркировки моментов времени съемки. Разведывательные камеры выполнены с возможностью регулирования частоты съемки в зависимости от сигнала управления измерителя скорости полета.
Существенным недостатком заявляемого способа и устройства для его осуществления является неэффективные возможности при съемке объектов линейного вида в условиях ветрового воздействия: охват съемки превосходит необходимые границы, перегружает базу данных “шумом”, что впоследствии приводит к увеличению затрат времени на получение и анализ выходных данных.
Решение задачи патентуемой группы изобретений - обеспечение строгой привязки к исследуемой системе, например к нефтегазопродуктопроводу, с одновременной синхронизацией процессов по созданию геоинформационной базы данных - обеспечивает получение технического результата - повышение эффективности, сокращение времени и затрат на локальный аэромониторинг геотехнических систем линейного вида.
Указанная задача достигается тем, что в способе локального аэромониторинга геотехнических систем, включающем съемку телевизионной камерой с выдерживанием трассы полета на высоте до 500 м с помощью курсовой телевизионной камеры и навигационных данных, координатную привязку видеокадров с возможностью последующего их селективного вызова, в отличие от способа по прототипу, курсовую и съемочную камеру - TV камеру высокого разрешения - устанавливают по продольной оси летательного аппарата, причем съемочную камеру устанавливают с возможностью вращения в горизонтальной плоскости и направляют перпендикулярно линии съемочного галса. Курсовую камеру устанавливают с возможностью вращения в горизонтальной и вертикальной плоскостях и направляют на опознавательный знак в конце линии съемочного галса. В штатном режиме съемки, когда нет ветрового воздействия на летательный аппарат, приводящего к отклонению оси летательного аппарата от линии съемочного галса, камеры устанавливают так, что их оптические оси лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. При режиме ветрового воздействия линию съемочного галса выдерживают путем поворота камер на угол компенсации и в интерактивном режиме отслеживают по положению отображаемого на бортовых видеомониторах опознавательного знака и по навигационным данным, получение которых синхронизируют с проведением радиометрической и геометрической коррекции с последующим сжатием, сохранением и регистрацией видеокадров в геоинформационной базе данных.
Указанная задача достигается также тем, что:
- синхронизацию радиометрической и геометрической коррекции, сжатие, сохранение и регистрацию видеокадров в геоинформационной базе данных с получением навигационных данных осуществляют по бортовому генератору времени;
- бортовой генератор времени до начала аэромониторинга калибруют по атомным часам через Интернет;
- геоинформационной базу данных организуют путем интеграции видеокадров с данными координатно-временной привязки по линии съемочного галса;
- покадровую съемку осуществляют с интервалом времени, требуемым для продольного перекрытия смежных видеокадров линии съемочного галса;
- выдерживание линии съемочного галса в интерактивном режиме осуществляют путем отображения текущей видеоинформации от съемочной и курсовой камер на видеомониторах блоков управления полетом и аэровизуального наблюдения;
- выдерживание линии съемочного галса при режиме ветрового воздействия корректируют на основе информации геоинформационной базы данных.
При реализации устройства указанная задача достигается тем, что бортовой комплекс для локального аэромониторинга геотехнических систем, включающий блок аэровизуального наблюдения объекта съемки на базе курсовой и съемочной камер, а также блок управления полетом по плану местности, снабженный бортовыми компьютерами и системой определения навигационных данных на базе GPS-приемника, высотомера и датчиков углов поворота камер, в отличие от устройства по прототипу, блок аэровизуального наблюдения соединен с блоком управления полетом с возможностью позиционирования на мониторах видеоинформации от обеих камер.
При этом блок аэровизуального наблюдения выполнен в виде горизонтально размещенной по продольной оси летательного аппарата демпфирующей платформы, содержащей коаксиально расположенные неподвижное и поворотное кольцо с установленным на нем с возможностью вращения в вертикальной плоскости курсовой камерой.
Съемочная камера - TV камера высокого разрешения - установлена с возможностью перемещения на любое из колец, а именно: в штатном режиме съемки она установлена на неподвижном кольце так, что оптические оси камер лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. При режиме ветрового воздействия съемочная камера установлена на поворотном кольце и развернута на угол компенсации угла ветрового скольжения.
Указанная задача достигается также тем, что:
- блок управления полетом соединен с бортовым генератором времени;
- бортовой генератор времени откалиброван по атомным часам через Интернет;
- блок управления полетом соединен с мультиплексором навигационных данных и датчиков углов поворота камер по месту и азимуту;
- поворотное кольцо платформы установлено внутри неподвижного, и между ними установлена подшипниковая опора;
- съемочная камера установлена на направляющих и соединена с соленоидом;
- поворотное кольцо соединено с приводом вращения, проградуировано на 360 градусов и зафиксировано в штатном режиме съемки на нулевой отметке;
- платформа снабжена цилиндрическим уровнем и микрометрическими винтами;
- курсовая камера соединена с приводом вращения в вертикальной плоскости.
Заявляемая совокупность существенных признаков группы изобретений позволяет прежде всего обеспечить съемку с летательного аппарата строго по линии съемочного галса в условиях ветрового воздействия, выдерживая его в интерактивном режиме при координатно-временной привязке покадровой съемки в реальном масштабе времени и создать достоверную геоинформационную базу данных - основу для анализа состояния исследуемой геотехнической системы.
Способ реализуется следующим образом. Борт летательного аппарата оборудуют системой, обеспечивающей синхронизацию навигационных и высотно-временных данных со съемкой в заданном интервале времени и координатной привязкой видеокадров, получаемых TV камерой высокого разрешения, которую устанавливают по продольной оси летательного аппарата с возможностью вращения в горизонтальной плоскости и направляют вниз перпендикулярно линии съемочного галса. Также по продольной оси летательного аппарата устанавливают с возможностью вращения в горизонтальной и вертикальной плоскостях курсовую камеру, которую направляют на опознавательный знак, выбранный в конце линии съемочного галса, при этом установку камер производят так, что их оптические оси лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. В интерактивном режиме линию съемочного галса отслеживают по положению отображаемого на бортовых видеомониторах опознавательного знака и навигационных данных с синхронизацией съемки в заданном интервале времени. В условиях ветрового воздействия по данным углового отклонения продольной оси летательного аппарата от линии съемочного галса съемочную камеру поворачивают на угол, компенсирующий угол ветрового скольжения, возвращаясь таким образом непосредственно к объекту съемки. Получение навигационных данных синхронизируют с проведением радиометрической и геометрической коррекции с последующим сжатием, сохранением и регистрацией видеокадров в геоинформационной базе данных.
Пример конкретного выполнения способа.
На борту летательного аппарата по его продольной оси устанавливают цифровую съемочную камеру высокого разрешения формата DVCAM с 3 ПЗС-матрицами и прогрессивной разверткой - Sony DSR-PD150Р и направляют перпендикулярно линии съемочного галса. Также по продольной оси летательного аппарата устанавливают курсовую камеру камерную головку Panasonic F15 (S-Video) и направляют на опознавательный знак в конце линии съемочного галса, определяемый до полета - одиночное дерево, пересечение дорог, здание, трубу и т.д. Получая на видеомониторе ПК в окне атрибутивных данных значение текущего азимута от датчика угла поворота через GPS-приемник, бортоператор контролирует эту точку в центре монитора, т.е. будущего кадра. Значение текущего азимута в автоматическом режиме в виде бегущей строки отражается на видеомониторе ПК пилота, обеспечивая возможность минимизировать отклонение этих значений для выдерживания запланированной линии съемочного галса, т.е. текущее направление линии съемочного галса приблизить до полного совпадения с запланированной. Видеоинформация от курсовой камеры позволяет со значительной точностью выполнить эту задачу.
При ветровом скольжении летательного аппарата, при несовпадении продольной оси летательного аппарата и линии съемочного галса, бортоператор визуально фиксирует на экране видеомонитора отклонение перемещающихся точечных объектов от вертикального прямолинейного движения на экране видеомонитора. Компенсируя отклонение, съемочную камеру перемещают на поворотное кольцо и поворачивают его до восстановления первоначального изображения на видеомониторе, т.е. производят поворот на угол компенсации угла отклонения от ветрового воздействия.
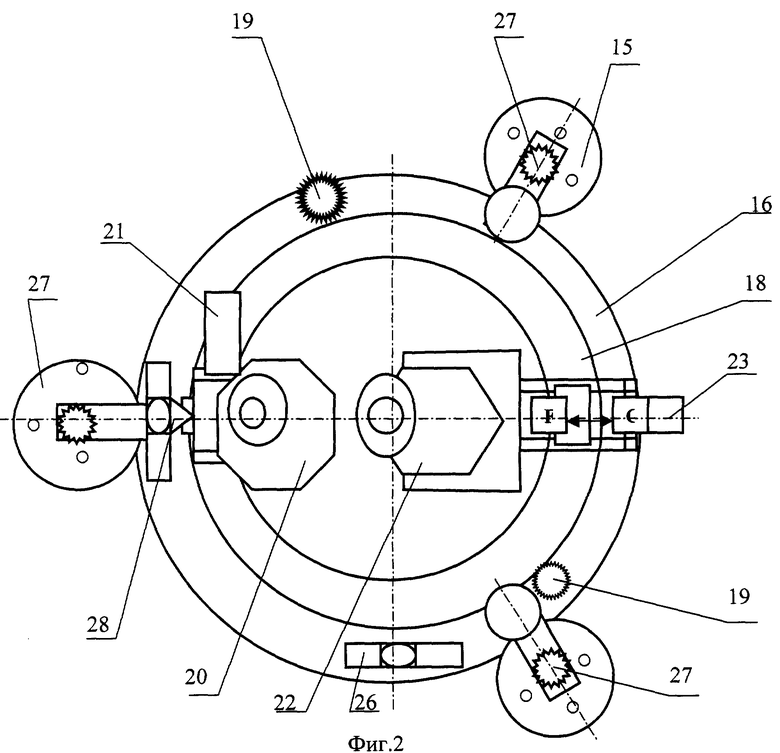
На фиг.1 изображена принципиальная схема бортового комплекса, поясняющая реализацию способа.
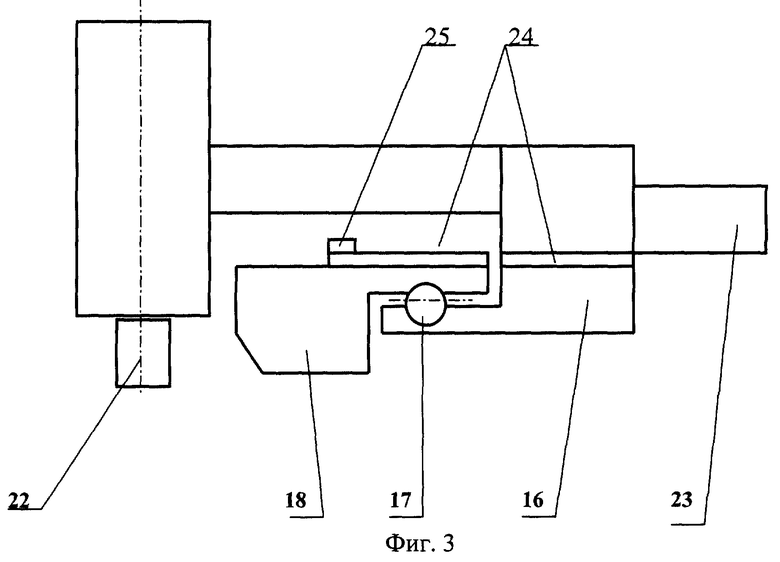
На фиг.2 изображена компоновка платформы блока аэровизуального наблюдения.
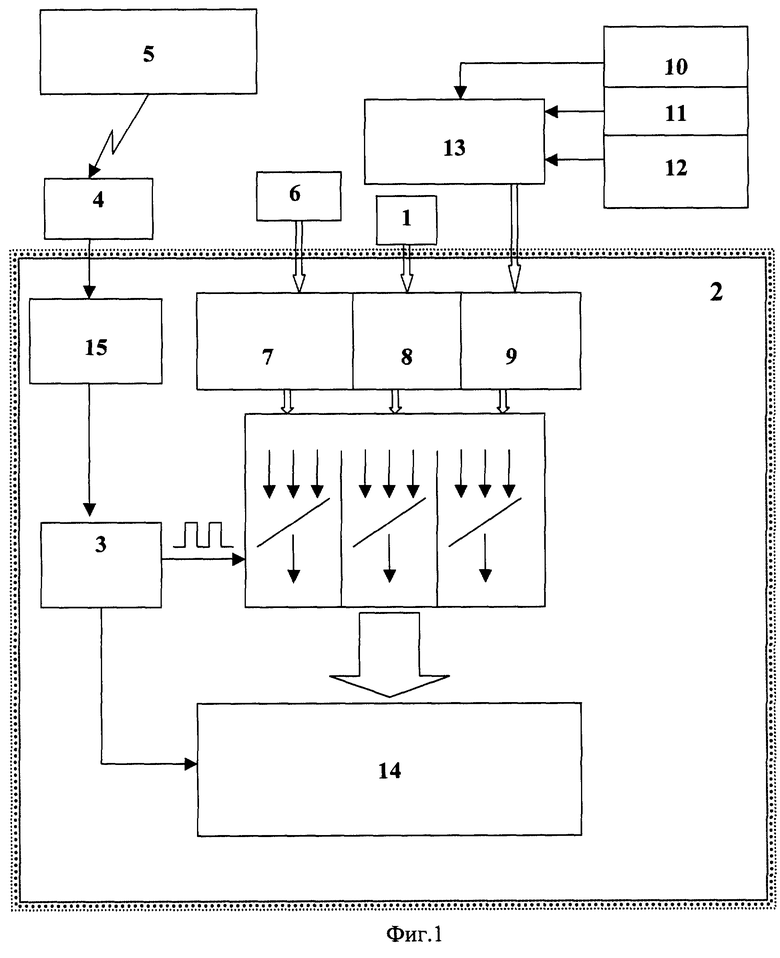
На фиг.3 - узел крепления съемочной камеры.
Съемку осуществляют синхронно с получением планово-высотных координат от GPS-приемника 1. Бортовой ПК 2 оснащен генератором времени 3, до вылета откалиброванным по атомным часам Сервера точного времени 5 через Internet посредством модема 4. Цифровая видеоинформация от курсовой камеры 6 поступает в бортовой ПК 2 через порт IEEE-1394 7 непрерывным потоком с частотой 25 кадров в секунду, т.е. с частотой кадров телевизионного сигнала PAL. GPS-информация поступает через порт СОМ-1 8 с частотой один отсчет информации в секундах. В каждом отсчете содержится информация о планово-высотных координатах центра видеокадра в системе координат WGS-84, азимуте из центра предыдущего видеокадра, расстоянии от центра предыдущего видеокадра, скорости и абсолютной высоте полета и времени по атомным часам GPS-системы. К порту СОМ-2 9 подключен мультиплексор 13, получающий данные лазерного высотомера 10, а также датчика углов поворота (азимута) кольца платформы 11 и датчика вертикальных углов (места) 12 и преобразующий их в цифровую форму.
По сигналу генератора времени 3 осуществляют выборку данных с заданным интервалом времени и в блоке накопления данных 14 производят запись на HDD отобранного видеокадра и соответствующих ему атрибутивных данных: планово-высотные координаты центра видеокадра; время "захвата" видеокадра; текущий азимут полета; расстояние от центра до центра соседних видеокадров; относительная высота по лазерному высотомеру до центральной точки видеокадра; путевая скорость летательного аппарата; данные об азимутальном и угле места для курсовой камеры.
Автоматизированная обработка этих данных совместно с априорной геодезической информацией (цифровой картой местности) позволяет решить задачу привязки сотен тысяч видеокадров высокого разрешения с требуемой точностью, т.е. создавать покрытия в заданном масштабе, картографической проекции и геодезической системе координат на линейные и площадные объекты природно-антропогенных геотехнических систем.
Демпфирующая платформа размещена горизонтально по оси летательного аппарата на подвесных опорах 15 и содержит коаксиально расположенные неподвижное внешнее кольцо 16 и установленное на подшипниковой опоре 17 поворотное внутреннее кольцо 18 с приводом вращения 19. На кольце 18 установлена курсовая камера 20 с возможностью вращения в вертикальной плоскости с помощью привода вращения 21. Съемочная камера 22 может быть установлена как на внешнем кольце 16, так и на поворотном кольце 18 путем перемещения с помощью соленоида 23 по направляющим 24, размещенным на кольцах платформы в месте установки съемочной камеры 22. Направляющие оснащены ограничителем 24. Кроме того, внешнее кольцо 16 оборудовано уровнем 26, микрометрическими винтами 27 и фиксатором 28 для поворотного кольца.
Устройство работает следующим образом.
Для аэромониторинга геоинформационных систем в штатном режиме съемки курсовую камеру 20 устанавливают на поворотном кольце 18 по продольной оси летательного аппарата и с помощью привода вращения 21 в вертикальной плоскости направляют на опознавательный знак в конце линии съемочного галса. Съемочную камеру 22 устанавливают на неподвижном внешнем кольце 16 на направляющих 24 и направляют перпендикулярно линии съемочного галса. Предварительно горизонтальное положение кольца 16 регулируют с помощью уровня 26 и микрометрических винтов 27. Камеры устанавливают так, что их оптические оси лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. В этом положении кольцо 18, проградуированное на 360 градусов, фиксируется с помощью фиксатора 27 на нулевой отметке.
В момент ветрового воздействия, когда происходит отклонение продольной оси летательного аппарата от линии съемочного галса, которое отражается в несовпадении текущего азимута полета с расчетным азимутом линии съемочного галса, пилот корректирует траекторию движения летательного аппарата, используя GPS-информацию. Одновременно на видеомониторе бортоператора наблюдается диагонально движущееся изображение подстилающей поверхности. Для осуществления съемки согласно с расчетным азимутом линии съемочного галса съемочная камера 22 включением соленоида 23 по направляющим 24 "выталкивается" на поворотное кольцо 18, которое с помощью приводов 19 поворачивается на необходимый угол компенсации ветрового скольжения. На видеомониторе бортоператора изображение подстилающей поверхности наблюдается как вертикально движущееся, что свидетельствует о точном совпадении реальной линии съемочного галса с расчетной. В положении осуществления съемки оба кольца зафиксированы до момента, когда появляется очередная необходимость в изменении угла поворота.
Таким образом достигнуто решение задачи эффективного использования времени и средств при достоверности и высокого качества данных локального аэромониторинга геотехнических систем, т.к. в ином случае геоинформационная база данных неоправданно перегружается шумовой информацией.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ГЕОТЕХНИЧЕСКИХ СИСТЕМ И БОРТОВОЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2307324C1 |
| БОРТОВАЯ СИСТЕМА ЛОКАЛЬНОГО АЭРОМОНИТОРИНГА ОБЪЕКТОВ ПРИРОДНО-ТЕХНОГЕННОЙ СФЕРЫ | 2006 |
|
RU2315951C1 |
| МУНИЦИПАЛЬНАЯ ГЕОИНФОРМАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2571919C2 |
| Система аэромониторинга залежек морских животных | 2015 |
|
RU2609728C1 |
| СПОСОБ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ ЗЕМЛЯНОГО ПОЛОТНА ЖЕЛЕЗНЫХ И АВТОМОБИЛЬНЫХ ДОРОГ | 2005 |
|
RU2296297C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| Способ проведения геотехнического мониторинга линейных сооружений и площадных объектов на основе воздушного лазерного сканирования | 2017 |
|
RU2655956C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
Группа изобретений относится к области экологического мониторинга природно-антропогенных геосистем, в частности территорий нефтегазовых месторождений. Способ локального аэромониторинга геотехнических систем включает съемку с выдерживанием трассы полета на высоте до 500 м с помощью курсовой камеры и навигационных данных, координатную привязку снимков с возможностью последующего их селективного вызова. Курсовую камеру и съемочную камеру устанавливают по продольной оси летательного аппарата. Съемочную камеру устанавливают с возможностью вращения в горизонтальной плоскости и направляют перпендикулярно линии съемочного галса. Курсовую камеру устанавливают с возможностью вращения в горизонтальной и вертикальной плоскости и направляют на опознавательный знак в конце линии съемочного галса. В штатном режиме съемки камеры устанавливают так, что их оптические оси лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. При режиме ветрового воздействия съемочный галс выдерживают путем поворота камер на угол компенсации и в интерактивном режиме отслеживают по положению отображаемого на бортовых видеомониторах опознавательного знака и по навигационным данным, получение которых синхронизируют с проведением радиометрической и геометрической коррекции с последующим сжатием, сохранением и регистрацией покадровой видеоинформации в геоинформационной базе данных. Бортовой комплекс для локального аэромониторинга геотехнических систем включает блок аэровизуального наблюдения объекта съемки на базе курсовой и съемочной камер, блок управления полетом по плану местности, снабженный бортовыми компьютерами и системой определения навигационных данных на базе GPS-приемника, датчиков углов поворота камер. Блок аэровизуального наблюдения соединен с блоком управления полетом с возможностью синхронного позиционирования на видеомониторах информации от обеих камер. Блок аэровизуального наблюдения выполнен в виде горизонтально размещенной по продольной оси летательного аппарата демпфирующей платформы. Платформа содержит коаксиально расположенные неподвижное и поворотное кольцо с установленной на нем с возможностью вращения в вертикальной плоскости курсовой камеры. Съемочная камера - TV камера высокого разрешения - установлена с возможностью перемещения на любое из колец. В штатном режиме съемки съемочная камера установлена на неподвижном кольце так, что оптические оси обеих камер лежат в плоскости, проходящей через продольную ось летательного аппарата и линию съемочного галса. При режиме ветрового воздействия съемочная камера установлена на поворотном кольце и развернута на угол компенсации угла ветрового скольжения. Технический результат состоит в повышении эффективности, сокращении времени и затрат на локальный аэромониторинг геотехнических систем линейного вида. 2 с. и 18 з.п. ф-лы, 3 ил.
| СПОСОБ ПОЛУЧЕНИЯ КРУПНОМАСШТАБНОЙ КАРТЫ ПАРАМЕТРОВ МНОГОМЕРНОЙ СТРУКТУРЫ ПРИРОДНОЙ СРЕДЫ И АЭРОФОТОСЪЕМОЧНЫЙ САМОЛЕТ ДЛЯ ЕЕ ПОЛУЧЕНИЯ | 1990 |
|
RU2044273C1 |
| СПОСОБ СОЗДАНИЯ ЦИФРОВЫХ ТОПОГРАФИЧЕСКИХ ФОТОПЛАНОВ С ПРИМЕНЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2188391C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| DE 19919487 A1, 23.11.2000 | |||
| Формирователь импульсов | 1982 |
|
SU1241441A1 |

